1. Introduction
Since the concept of unmanned autonomous ships (UASs) was established, the research and development of UASs has become a key breakthrough project in the global shipping industry. To this end, the research and development institutions in various countries have conducted in-depth research on the intelligent navigation and control of UAS. At present, research on intelligent motion control navigation is in full swing. The most representative applications are various types of small unmanned surface vehicles (USVs) [
1]. Developing a small intelligent hull and conducting a series of studies will lay a solid foundation for future large-scale intelligentization.
It is well known that steering tracking control is an important research hotspot in the field of ship motion and control, which is related to both the economics and safety of ship navigation [
2,
3], such as in ship collision avoidance [
4,
5]. Due to the uncertain parameters, nonlinearity, and external interference [
6] in the USV motion control model, conventional proportional–integral–derivative (PID) control is not effective enough, and the control input chattering situation is serious [
7]. Therefore, ideal sliding mode control (ISMC) [
8,
9] can be effectively applied to the motion control of nonlinear systems. Neural network systems have universal approximation performance for arbitrary functions, which can effectively solve the problem of the uncertainty of USV motion systems [
10,
11]. Wang et al. [
12] proposed the use of a radial basis function (RBF) network for control input compensation and designed an intelligent tracking control algorithm for USVs based on SMC under limited input conditions. Dongdong et al. [
13] proposed an adaptive trajectory tracking control strategy for underactuated unmanned surface vehicles. The neural network minimum learning parameter method proposed in this paper features a small amount of computation. After combining the SMC and RBF networks and applying them to the design of USV motion control, the performance of the controller could be further improved [
14,
15].
However, when neural networks are used for the modeling and control of motion systems [
16], the function estimation and classification functions of neural networks are most commonly used. The key to designing a neural network is to determine the structure and connection weight coefficients of the neural network. For the most typical radial basis function (RBF) neural network, the connection weights and parameters of the Gaussian functions are mainly determined by experience [
17]. If the parameters are not properly selected, it is easy for the system to fall into local extremes [
18]. Genetic algorithms (GAs) can be used for calculation optimization [
19] and in the design of neural networks [
20]. In [
21], a GA optimized the center vector and basis width of an RBF neural network and updated the weight of the RBF network in real time, improving the accuracy of RBF tracking. In [
22], a genetic algorithm was used to optimize the weight of a RBF network and a clustering algorithm was used to determine the number of centers of the basis function of the RBF network. Then, a coke quality prediction model based on the GA-optimized RBF neural network was designed. Based on the literature [
17], the key to RBF network application is to determine its three parameters.
Considering the shortcomings of GAs [
17], some improvements have been proposed, such as an adaptive mutation algorithm and an excellent individual protection algorithm. In [
23], utilizing the excellent global search ability of gene expression programming (GEP) to optimize the RBF neural network, a GEP-optimized RBF multi-output model algorithm (GEP-RBF algorithm) was designed. This model has good prediction accuracy and multi-output balance.
Motivated by the above-mentioned observations, an intelligent control algorithm was proposed based on SMC with an optimized RBF network. GA was used to optimize the RBF network, and the optimized RBF network was directly approximated to the USV motion control input instructions. Then, the system stabilization function was constructed using SMC theory. Finally, the USV navigation motion intelligent control algorithm was introduced using stability theory.
The contributions of this paper can be summarized as follows. The previous USV motion controller is remodeled based on SMC and RBF Neural Network (RBFNN). The GA-optimized RBF network directly inputs the control law, which overcomes the chatter caused by the uncertainty term in the USV model. At the same time, by modifying the adaptation value and mutation probability and by differentiating N subpopulations, the improvement of the general GA algorithm can reduce the prevalence of falling into local extremes, speed up the optimization process, and further improve the input accuracy of the RBF network.
2. RBF Neural Network and Its Genetic Optimization
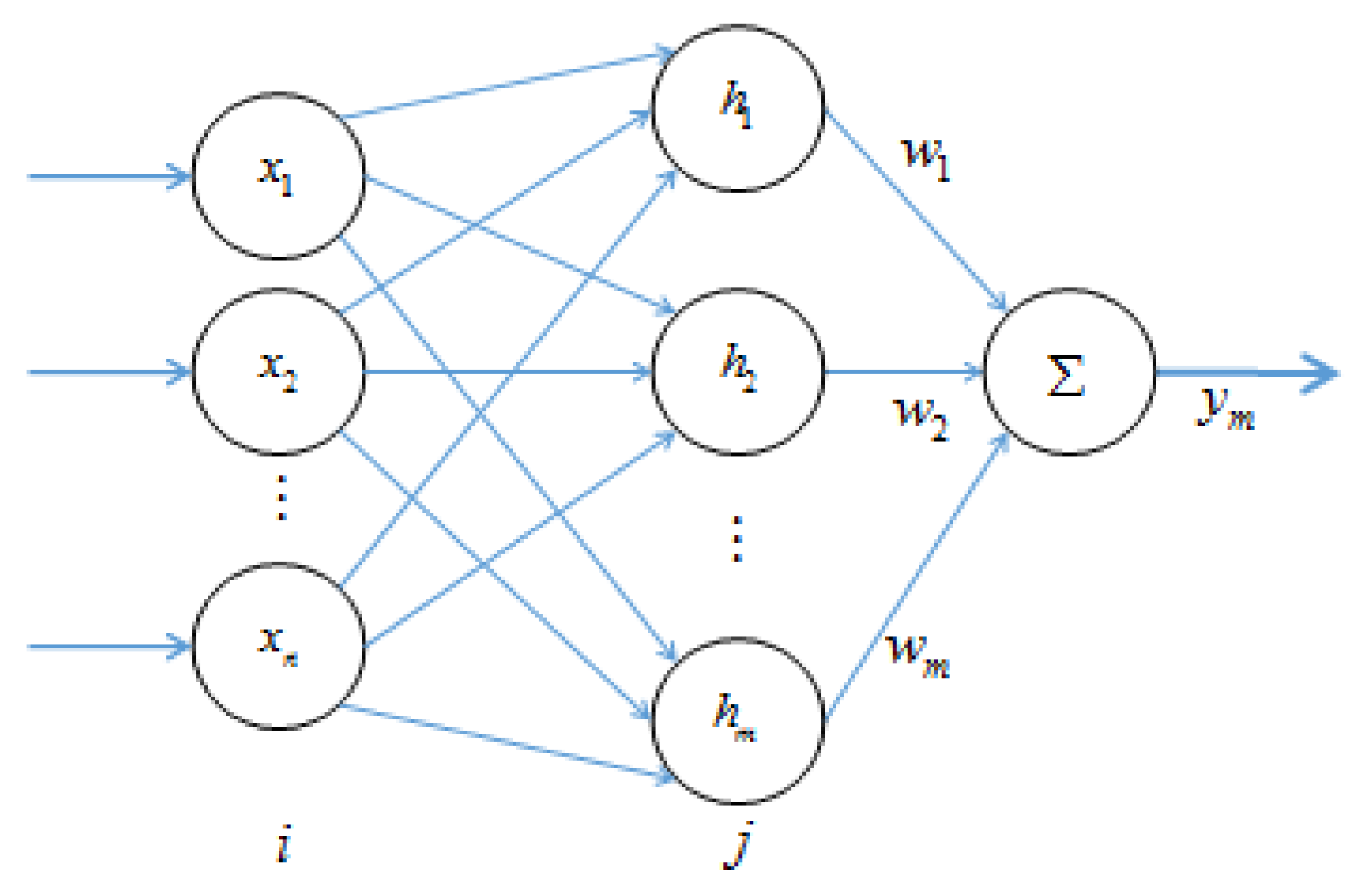
The RBF neural network is a neural network proposed by Moody and Darken [
17] in the late 1980s. It is a three-layer, feed-forward network with a single hidden layer, as shown in
Figure 1. Because it simulates a neural network structure that is locally adjusted in the human brain and covers the receiving area with itself, the RBF network is a local approximation network. The fact that the mapping from input to output is nonlinear and the mapping from the hidden layer space to the output space is linear can greatly speed up the learning process and avoid local minima and can also approximate any continuous function with arbitrary precision [
17]. However, it is difficult to determine parameters like connection weights, center widths, and center values for the Gaussian function [
18].
2.1. RBF Neural Network Approximation Algorithm
The RBF network input/output algorithm [
17] is
where
is the network input,
is the i-th input of the network input layer,
is the j-th network input of the network hidden layer,
is the output of the Gaussian function,
is the ideal weight of the network, and
is the error of the ideal neural network approximating
,
.
If the network input is taken as
, then the output of the network is
where
is the network output and
is the estimated weight of the neural network.
2.2. Optimization of the RBF Neural Network based on the Genetic Algorithm
The current methods will be used to improve the performance of RBF networks, which include fuzzy algorithms and intelligent optimization algorithms [
24,
25,
26,
27]. In fuzzy systems, the design of fuzzy sets, membership functions, and fuzzy rules is based on empirical knowledge, and the algorithm itself does not have the ability to learn autonomously [
25]. However, the intelligent optimization algorithm represented by the genetic algorithm [
26,
27] can realize self-learning by using the law of biological evolution, ultimately converging to the most adaptive group to obtain the optimal solution or most satisfactory solution.
In addition, the main advantages of genetic algorithms [
17] are listed below:
- (1)
To solve any form of objective function and constraint optimization problem, whether it is linear or nonlinear, discrete or continuous, the genetic algorithm does not require any mathematical model. Depending on its evolutionary nature, the inherent nature of the problem need not be known during the search process.
- (2)
The ergodicity of evolutionary operators makes genetic algorithms very efficient in globally searching for probabilistic meanings.
- (3)
For a variety of special problems, genetic algorithms can provide great flexibility to mix and construct domain-independent heuristics, thereby ensuring the effectiveness of the algorithm.
When the GA runs its optimization calculations, a large system size will cause poor optimization performance. Similarly, a system sample without important characteristic genes can also cause the optimization process to converge prematurely and fail to reach the optimal solution [
28]. In order to solve the above problems, this paper adopts a modification to the adaptation value and mutation probability to improve the traditional optimization algorithm.
Thus, the improved genetic algorithm (IGA) is used to determine the connection weight parameters of the RBF network. The genetic optimization process of the RBF neural network is shown in
Figure 2, and the process of optimization can be described as follows:
Step 1: The N subpopulations are initialized, and the initial network parameters (connection weights, center width, and center value of the Gaussian function) are encoded as genes.
Step 2: N subpopulations carry out evolutionary operations independently.
Step 3: Performance judgement? If no, go to the next step. If yes, end, and go to the RBF learning step.
- (1)
Firstly, autonomous learning of the RBF network.
- (2)
Secondly, absolute error calculation.
- (3)
Thirdly, parameter updating.
- (4)
Finally, performance judgement? If Yes, end. If No, go to autonomous learning and error calculation.
Step 4: The average fitness of N subpopulations is calculated.
Step 5: The selection and cross operations are performed separately.
Step 6: Mutation operations are performed separately.
Step 7: The new N subpopulations are recalculated and returned to Step 2.
2.2.1. Adaptation Value Correction
If
is the adaptation value calculated in the usual way, and
is the average adaptation value [
17], then the revised adaptation value is
Here, k1 > 1. The effect of this correction is to reduce the influence of genes whose adaptation value is too large, slow down their convergence speed, and expand the search space.
According to the model theory, after the adaptation value is modified, as the genetic algorithm gradually evolves, the average adaptation value will become increasingly larger, and optimization will develop in an ideal direction.
2.2.2. Correction of Mutation Probability
The mutation probability is corrected as follows:
where
represents the algebra of the GA’s evolution;
and
represent the upper and lower limits of the mutation probability; and
is a constant less than 1.
The correction method can be used to increase the mutation probability automatically when premature convergence occurs to expand the search space. At the same time, in order to prevent the best results being destroyed due to an overly high mutation probability, the best samples are kept in each iteration. Generally, the values of the above parameters are: , , , , and .
In order to obtain satisfactory approximation accuracy, an absolute error index is used as the minimum objective function for parameter selection:
where
is the total approximation step, and
is the approximation error of the i-th step.
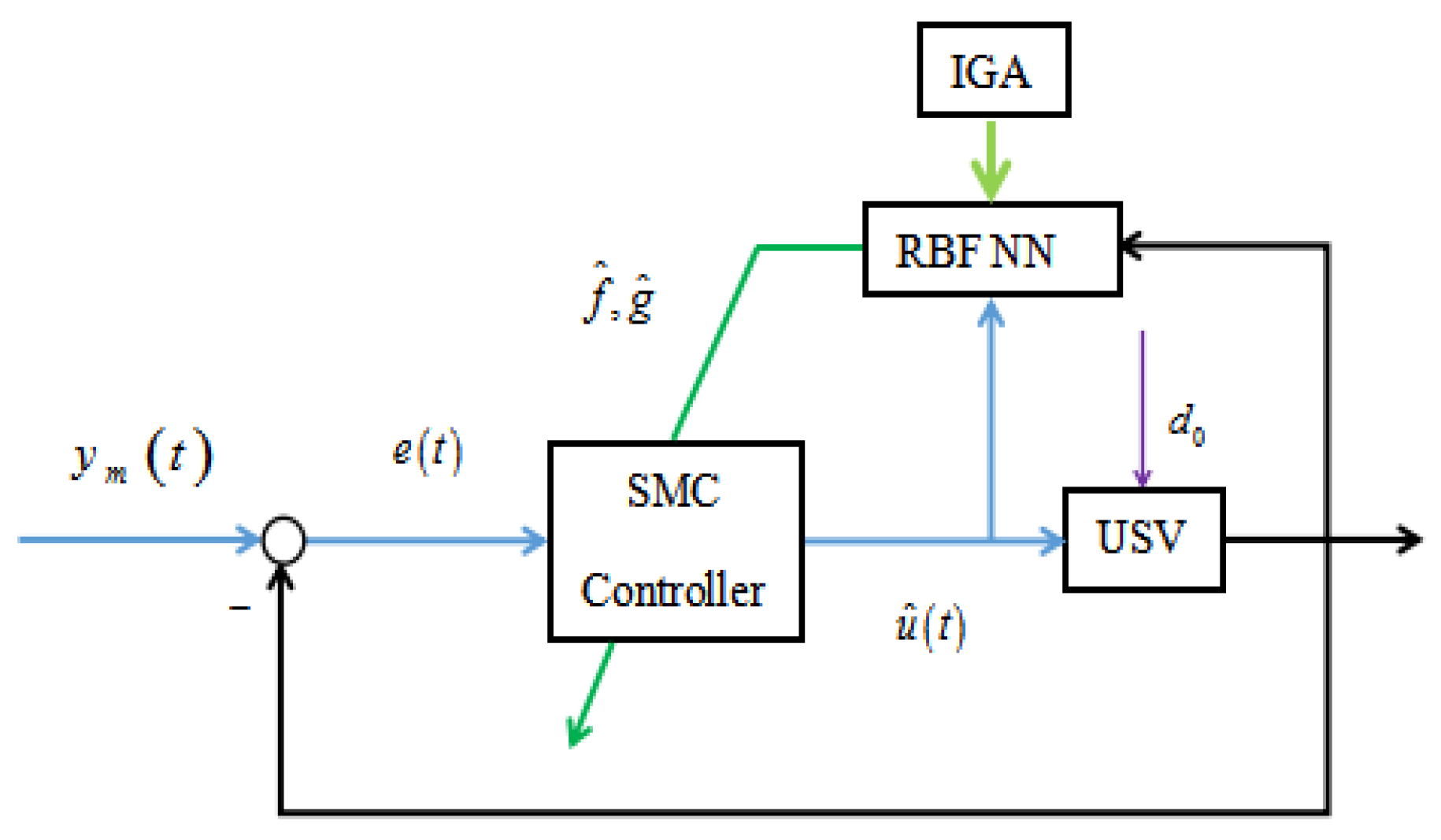
3. USV Ideal Sliding Mode Control Based on the RBF Neural Network
Because the SMC control law contains the uncertainty terms
and
, the optimized RBF neural network is used to approximate the control input instruction to achieve ideal control of the USV. First, the initial network parameters (connection weights, center width, and center value of the Gaussian function) are encoded as genes, and the optimized parameters output by the IGA are accepted. Then, the absolute error of the control system is determined by the optimized RBF network. Then, the RBF network output is transmitted to the SMC control unit after performing autonomous learning. Lastly, an intelligent control algorithm for USV navigation motion is introduced based on the SMC method with Lyapunov stability theory. The intelligent control algorithm flow is shown in
Figure 3.
3.1. USV Motion Mathematical Model
In the case of external disturbances and system parameter disturbances, Nomoto’s equation is used as a dynamic mathematical model of USV plane motion [
29,
30]:
where
and
are the ship’s parameters, which can be obtained through ship experiments, and
and
are the perturbations.
is the heading and
is the rudder angle.
is the external disturbance,
; its equivalent rudder angle interference model in Nomoto’s model will be explained in the computer experiments section.
is a nonlinear function of
, which can be approximated as
where
is a real-valued constant.
In order to perform sliding mode control design, Equation (1) needs to be transformed into the following form:
where
,
,
,
, and
.
3.2. Ideal Sliding Mode Control Based on the RBF Neural Network
The USV navigation controller is introduced with SMC technology and Lyapunov stability theory [
31]. The optimized RBF network is applied to approximate the control law of USV with the problem of system parameter perturbation.
According to the SMC design theory, the sliding mode surface function is defined as follows:
where
,
,
is the actual system output, and
is the system input instruction.
Thus, Equation (10) can be inferred using Equation (9):
where
.
The existence of an ideal sliding mode control law [
32] in the absence of external interference and system parameter perturbation can make the controlled system (Equation (8)) globally stable, and the system convergence speed can be adjusted by parameter
. The ideal sliding mode control law is
The control law has limitations because the system function
and gain
are unknown. The optimized RBF neural network was used to approximate
to achieve ideal control of USV navigation. The inputs of the RBF neural network, containing the system variables and sliding mode surface functions, are
where the compact set is expressed as
The ideal output of the RBF neural network can be rewritten [
18] as
where
,
h(
z) is a Gaussian function,
is a network approximation error, and |
π| ≤
π0.
After being approached by the GA-optimized RBF neural network, the actual input of the SMC controller was
In this formula, is an estimated value of .
The network learning adaptive law is designed as follows:
where
and
.
Equation (17) can then be obtained according to Equations (10) and (15):
Similarly, Equation (18) is produced according to Equations (14) and (17):
In order to suppress the external disturbance of the system, the ideal sliding mode control law in Equation (11) is further improved as
where
.
Further, Equation (20) can be deduced by Equations (18) and (19):
where
.
Based on this, the Lyapunov Function was constructed as follows:
Thus, Equation (22) can be inferred via Equation (21):
The inequality equations are as follows:
Therefore, Equation (24) can be acquired by Equations (22) and (23):
Equation (25) can be realized by Equation (24) because of
(
is the maximum eigenvalue of
).
where
.
According to Lemma B.5 in [
33], the inequality in Equation (25) is solved as
According to Equation (21),
is a specific value at the initial time, similar to constant
. Thus, Equation (26) can be rewritten as
where
.
The first term in Equation (27) gradually decays to over time. For this reason, as long as the second term is guaranteed to be a very small amount, it can be guaranteed that when , .
Therefore, the control system remains stable as long as .
4. Computer Simulation Experiment Results and Analysis
The USV named “Lanxin” [
29] was adopted for the computer simulation. With a speed of 8.5 knots, the parameters of the Nomoto model are listed as
,
,
, and
. Considering the disturbances of wind and waves, the equivalent interference model can be replaced by a transfer function of a second-order wave driven with white noise [
34]:
where
is Gaussian white noise, whose average value is zero, and the power of spectral density is 0.1;
is a transfer function of the second-order wave and is defined by Equation (29):
where
is the wave’s dominant frequency,
is the damping coefficient, and
and
are constants.
4.1. Verification of Practical Performance Experiments
The practical performance of the intelligent control algorithm is confirmed though five computer simulation experiments. In the five experiments, the control parameter of the sliding mode surface is , , the parameters of the IGA are , , , , , and the parameter of the crossover operation is . The excitation function of the hidden layer is , the excitation function of the output layer is , and the learning parameters of the RBF network are and .
During the experiment, the optimization process tended to converge when the optimization process executions exceeded seven. At the same time, in order to facilitate data calculation, an odd number of experiments was performed. Thus, the first nine sets of experiments were intercepted here, as shown in
Figure 4. Compared with the general GA, the IGA optimization process converged faster, and the objective function value was smaller. As shown in
Table 1, the average value of the objective function of GA optimization is 974.33, and the average/median value is 0.998. The average value of the objective function of IGA optimization is 821.44, which is 15.7% smaller than that for the GA; the average/median value is 0.975, which is 2.3% smaller than that of the GA.
The specific results of the ship motion control under various experimental conditions are shown in
Table 2.
Table 2, A represents the heading change experiment. In this experiment, the controller parameters were set as described above. The first order response pattern was used to perform the tracking experiments. The amplitude was 030°, and the initial value of the experiment was 000° without interference. The test results are shown in
Table 2, row A.
B represents the model perturbation experiment. The difference here from experiment A is the added perturbation of the system parameters and that the parameter values of USV are perturbed by 40%. The test results are shown in
Table 2, row b.
C represents the sinusoidal interference experiment. The difference here from experiment A is the added external sinusoidal interference. The system output is subjected to sinusoidal interference with an amplitude of 2° and a frequency of 0.1 rad/s. The test results are shown in
Table 2, row C.
D represents the white noise interference experiment. The difference here from experiment C is that the external interference changes to white noise. The system output is subjected to white noise with an amplitude of 0.1. The test results are shown in
Table 2, row D.
E represents the compound interference experiment. The difference here from experiment A is the added compound external interference. The parameter values of USV are perturbed by 40%, and the system output is subjected to white noise with an amplitude of 0.1. The test results are shown in
Table 2, row E.
Based on the result of the experiments in
Table 2, the effectiveness and practicality of the intelligent control algorithm is verified because the control performance indicators satisfied the engineering design requirements.
4.2. Verification of Advanced Performance Experiments
In order to verify the advanced performance of the intelligent control algorithm of USV based on the IGA-optimized RBF neural network proposed in this paper, the tracking control results of this method are compared with the results of the sliding mode control algorithm based on the RBF neural network and the algorithm based on a fuzzy neural network. The three parameters of control performance are then compared between the three methods.
In this paper, three algorithms are applied to the navigation control of the USV under certain conditions in the following three ways. First, the initial course is 000°, and the tracking course is 030°. Second, the second-order pop model is used to determine the compound interference of wind and waves. Third, a servo-driven model of a steering gear is included in the USV control model.
The navigation control of the USV is then determined using the three algorithms mentioned above, and the results of the comparison experiment are shown as
Figure 5.
6. Conclusions
When an RBF neural network is used for the modeling and control of a motion system, it is easy to fall into the local extreme since the parameters mainly depend on experience; thus, it is still difficult to apply the RBF to such a design. In response, this article applied the IGA to optimize the RBF network for effective application in the development of UAS control systems.
Through computer simulation experiments, we found that: (1) The intelligent control algorithm of the USV based on the IGA-optimized RBF neural network proposed in this paper can effectively track the target course, and its tracking accuracy is high; (2) compared with the sliding mode control algorithm based on a Fuzzy neural network and RBF network, the intelligent control algorithm based on the IGA-optimized RBF neural network is more advanced and can thus be applied to the research and development of UAS control systems.
In addition, it should be noted that the improvement of the GA in this paper is performed by modifying its adaptation value and mutation probability. There are possibly better ways to improve the GA. At the same time, there are no observational data on external interference, which, to a certain extent, can cause the chattering problem for the control input.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}