This section is devoted to a practical implementation of the proposed OD approach to nonlinear tracking controllers design for marine vessels. Particular attention is given to the forward speed tracking control law with initially given reference signal.
3.1. Tracking Control Problem for Marine Vessels
To consider the problems of tracking control for marine applications, let us accept the following widely used [
1,
2] nonlinear dynamical model of a marine vessel:
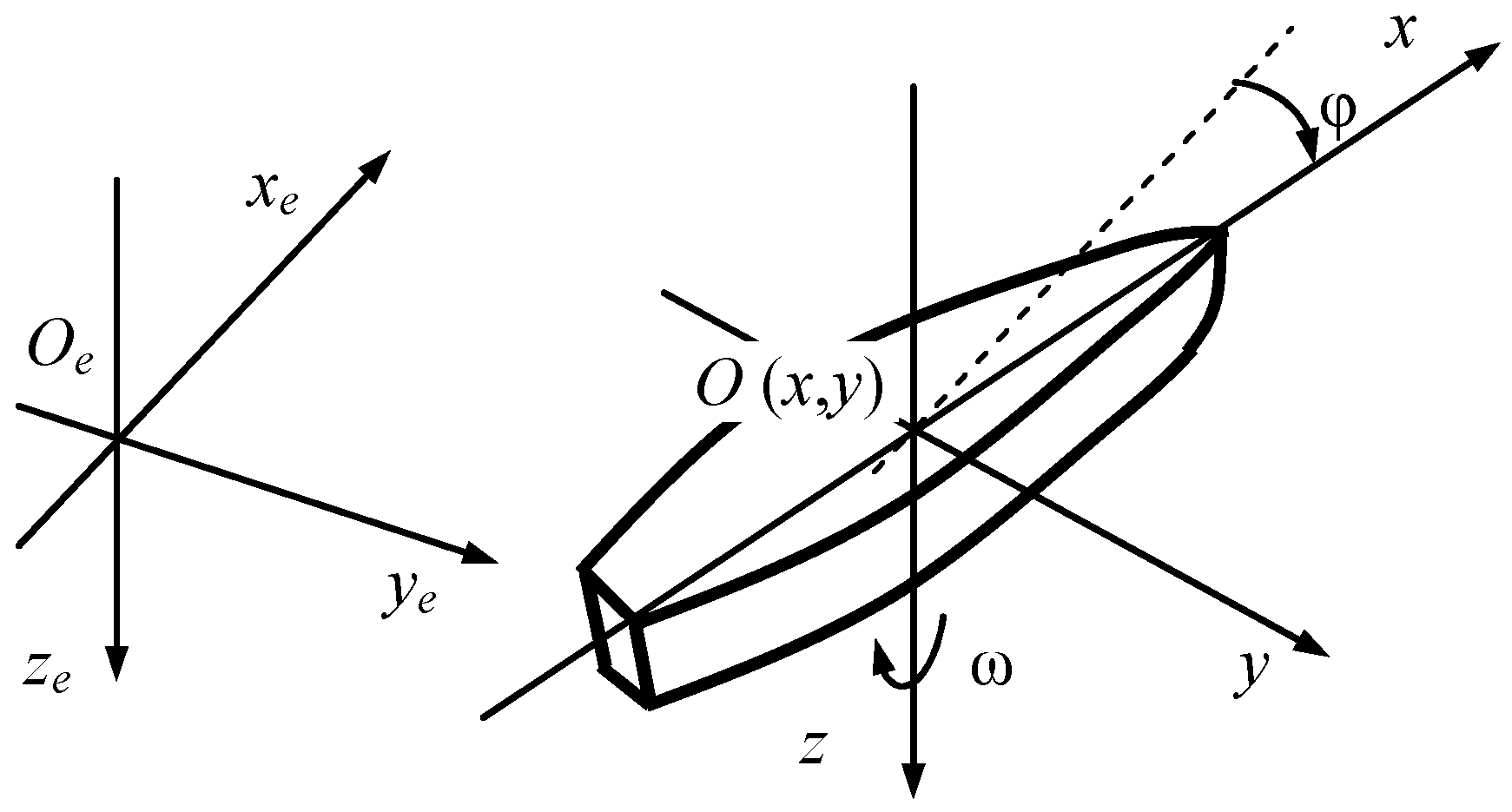
Here, the following notations are used:
, and
are the projections of the velocity vectors on the axes of a vessel-fixed frame
(
Figure 1);
is the auxiliary vector of dynamical parameters;
is the heading angle, and
is the vertical rudder deflection. The functions
and
represent hydrodynamical forces, which are produced by the ship’s engine and the water resistance correspondingly.
The control signals and must be composed by the automatic control system to be designed. The first of them determines a reference surge speed of the vessel, and the second one presents a reference speed of the rudders’ deflections.
Assuming that the number of the screw rotations is proportional to a reference surge speed, the function
determining a trust force of the screw can be presented in the form
We accept here that , and that the variables and are treated as known functions of the dynamical parameters .
Let us introduce new vector variables
,
, and, taking into account (16), we can rewrite nonlinear model (1) of the vessel dynamic as follows:
Now we specify a certain reference motion
,
,
, and
of the plant (17), satisfying the identities
Using systems (17) and (18), we can present equations of vessel dynamic in deflections from the desirable reference motion of the form
where
One can see that
,
,
, and
are known functions of
: using new correspondent notations
, we can rewrite (19) as follows:
stating that the resulting system (21) has a zero-equilibrium position.
Let us especially note that, unlike (17), this system is not only nonlinear, but also non-autonomous. This is due to the explicit introduction of the time-dependent reference signals into the vessel dynamics equations.
The purpose of the control design procedure is to construct the following stabilizing feedback controllers in deviations:
such that the zero equilibrium of the closed-loop connection (21), (22) is asymptotically stable. This means that if the motion of the initial plant (15) takes place under the action of tracking controllers of the form
starting in some neighborhood of the point
, then this motion tends to the reference one as
becomes infinite.
As for the performance of control processes, they are usually formalized mathematically using certain functionals, which are given on the motions of the closed-loop system (21), (22). Currently, the commonly used approach to design stabilizing controllers (22) is setting and solving the following optimization problem
based on the integral functional
where
is the set of admissible pairs
and subintegral function
is positive definite for all its arguments.
In contrast to the problems (24), (25) with traditional methods of its solving, as mentioned above, we propose to use novel approach based on the OD concept.
Let us especially note that both the solution of the problem (24) and the solution of the OD problem significantly depend on the initially given mathematical model (21) of a marine vessel. Naturally, this is evidence that this model cannot be formed accurately, which raises very important questions about the robust features of the closed-loop system to be designed. This problem is quite solvable for various types of marine vessels: the paper [
29] is an example. However, the study of the robust features of tracking OD controllers presents an independent problem to be addressed in future studies.
3.2. Forward Speed OD Tracking Controller Design
In general, the synthesis of the two stabilizing controllers (22) using OD technique can be carried out simultaneously. Nevertheless, one can also apply a combined approach to the feedback design for the considered plant (21) with two control channels. In the range of this approach, the first control is formed based on the OD problem, and the second one can be designed in any other way, providing desirable performance features. However, a joint closed-loop system must have zero equilibrium, and this motion must be asymptotically stable.
Realizing this idea, let us accept the dynamic controller for rudders (marine autopilot) in the following form:
where
is the state vector of this controller.
In particular, the feedback (26) may have a multipurpose structure, which is presented in detail in [
22,
27] for linear time-invariant case. Its implementation taking into account control time-delay is investigated in the paper [
28].
The equations of the control plant now take the form
In order to synthesize a feedback for the first control channel, i.e., design the OD forward speed stabilizing controller, let us introduce the functional to be damped as
Let us take as a Lyapunov function candidate the following sum of quadratic forms:
Based on (28), (29), we can state the correspondent OD problem of the form
where the rate
of the functional
change is determined as follows:
Let us solve the problem (30), taking into account (31) and assuming that the extreme is achieved at the inner point of the set
: with necessity we obtain
that determines the following controller
Since, according to formulae (15)–(21), we have
we arrive from (32) at the following OD controller:
where
,
.
It is necessary to note that if the value is out of an inner part of the admissible set , we must use the control signal instead of (33).
It is necessary to note that practical problems involve situations where the right part of the equation for forward speed has a more complex structure than for the system (17). In general, this equation can be presented as
which results in the correspondent equation for the system (21) in deflections:
where
In this case, instead of (31) we have
and the analytical search for stationary points of the function
becomes problematic. Nevertheless, it is always possible to consider a question about the numerical solution of OD problem (30) for each aggregate of fixed parameters
. Moreover, it is always possible to pose a finite dimensional minimization problem
on the finite net
for any compact set
. This problem should be solved at the time
for the fixed parameters
. Obviously, with a sufficiently large number of points for the set
, the solution of the problem (34) tends to solution for the same problem on the set
.
Finally, in accordance with formula (23), we can compose the tracking controller of the form
where the stabilizing part
is determined by equality (33). One can see that the resulting representation for OD forward speed tracking controller is as follows:
The current values of the dynamic parameters must be measured to implement the controller (35).
3.3. Numerical Example of OD Tracking Controller Synthesis
To illustrate a practical implementation of the proposed OD approach, let us consider a practical example of forward speed tracking controller design for the transport ship with a displacement of 3500 tons, a length of 110 m, a width of 14 m, and an immersion of 5 m. As a mathematical model of the plant, let us accept equations (17), which are presented in [
1,
2] with the given functions
,
,
and parameter
.
First, we define the reference motion of the ship as a partial solution of system (17) with the initial conditions
,
. Let us accept the reference forward speed control as follows:
To determine the reference control for the rudders, let us initially construct a model feedback as a controller
fulfilling the command-heading signal
. The basis item
in (37) stabilizes Linear Time Invariant (LTI) plant
which is a result of the plant (17) linearization in the neighborhood of the origin for a fixed forward speed
. Let us especially notice that the linear model (38) is used only for the synthesis of controller (37) but is not used for simulation and for performance indices computation: controller (37) closes full initial model (17) of the vessel.
Accepting
, we obtain
We design the basis control
for plant (38) with aforementioned parameters as the Linear Quadratic Regulator (LQR) optimal controller with respect to the functional
where
,
. Let us especially remark that the choice of the presented parameters for the functional (39) is determined by the initially given requirements to a dynamic quality of the control processes for the nonlinear time varying system. These requirements provide desirable settling time and overshoot for the closed-loop connection.
As a result of computations, we get the constant vector
, where
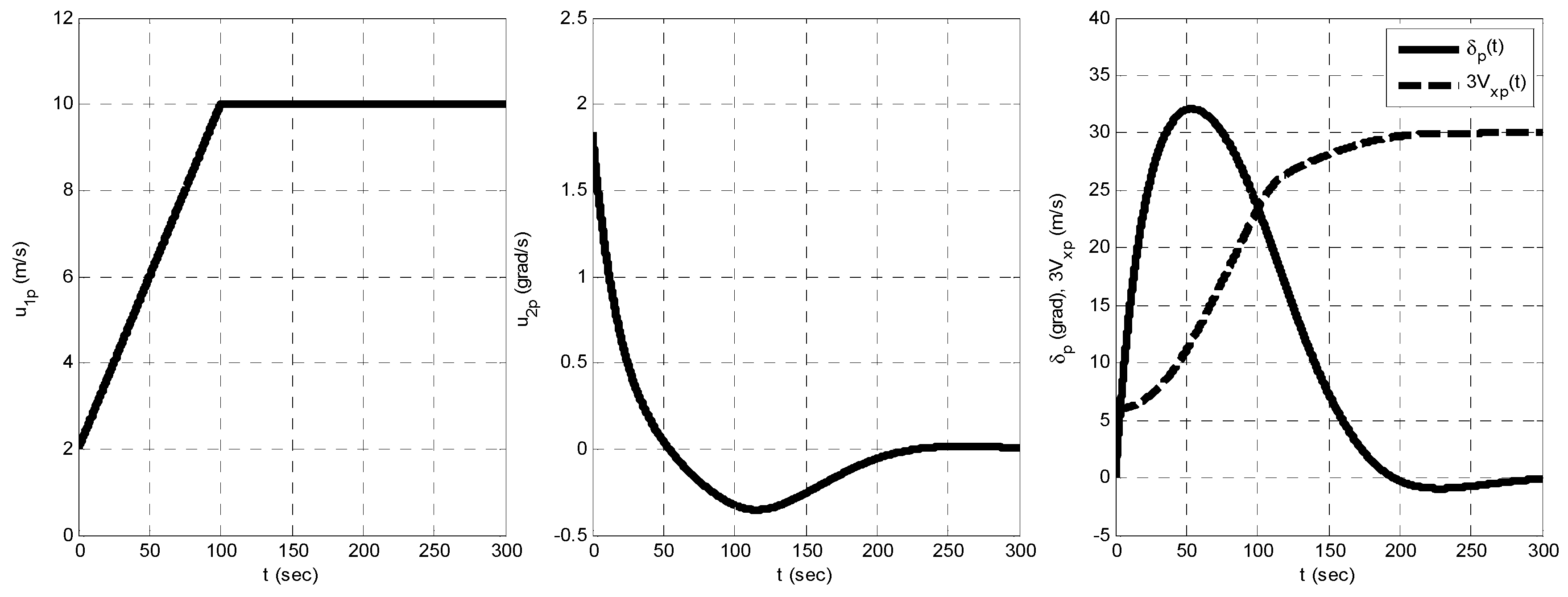
Let us substitute the reference heading control
and the rudders feedback control
into Equation (17). After integration, we obtain the functions
,
, and
, which determine given reference motion of the vessel. The graphs of aforementioned functions are presented in
Figure 2 and
Figure 3.
To provide simulation process, instead of (23), (26), we accept the following simple feedback control law for a marine autopilot:
where
is the command-heading signal. This controller, corresponding to (40), can be directly used for actuators of the vertical rudders.
Thus, one can see that, as a result, initial control plant (17) is closed by the tracking controllers (35) and (41). The current values of the dynamic parameters , , , , and must be measured by the corresponding sensors for the actual implementation of these controllers.
For simulation of the closed-loop system dynamics, the following parameters values are accepted: , , , . In addition, let us take into account the restrictions and .
To illustrate the practical applicability of the proposed approach, let us simulate the control processes for the closed-loop connection. The aim is to make the proposed approach comparable to other methods. This determined the choice of design parameters and regimes of vessel’s motion. These regimes represent the most popular options for movement on quiet water and under the action of sea waves.
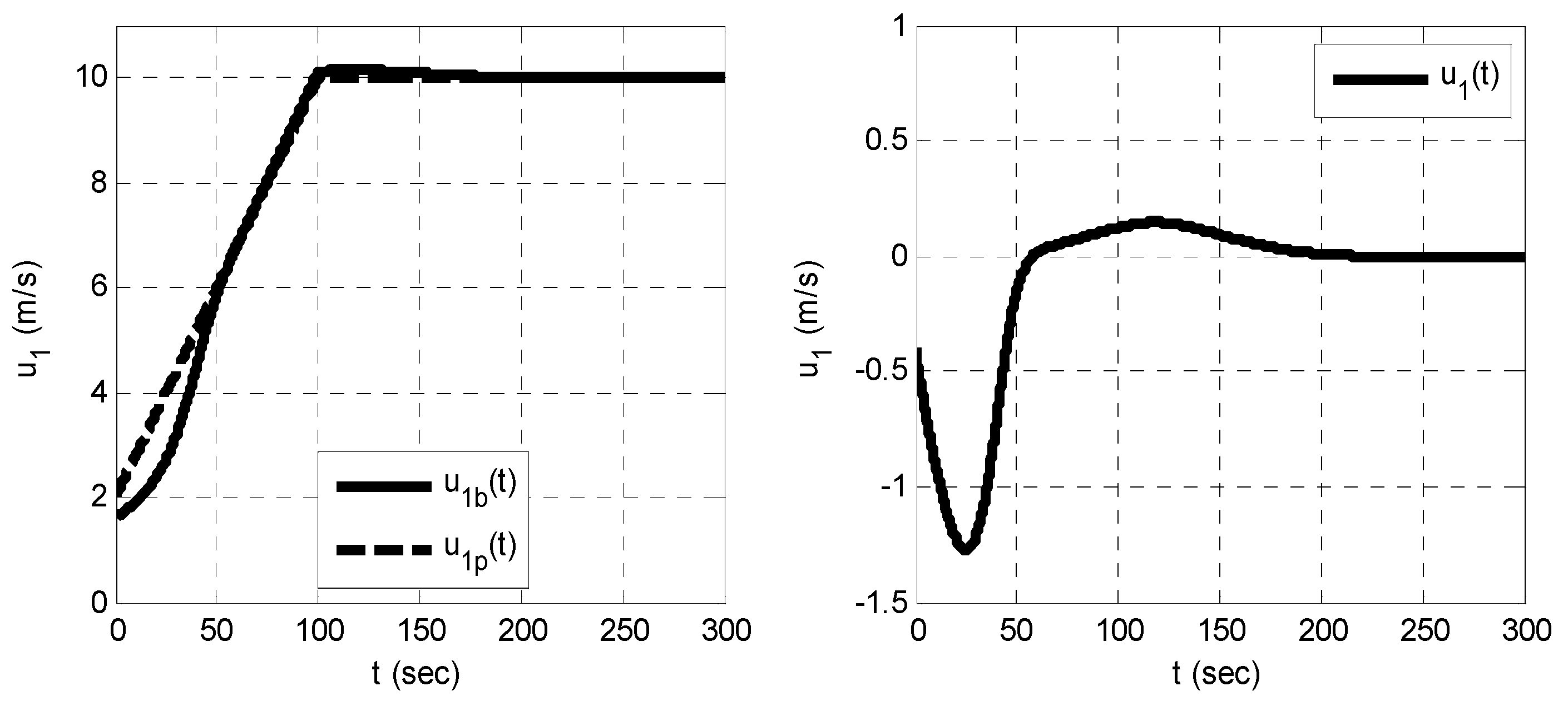
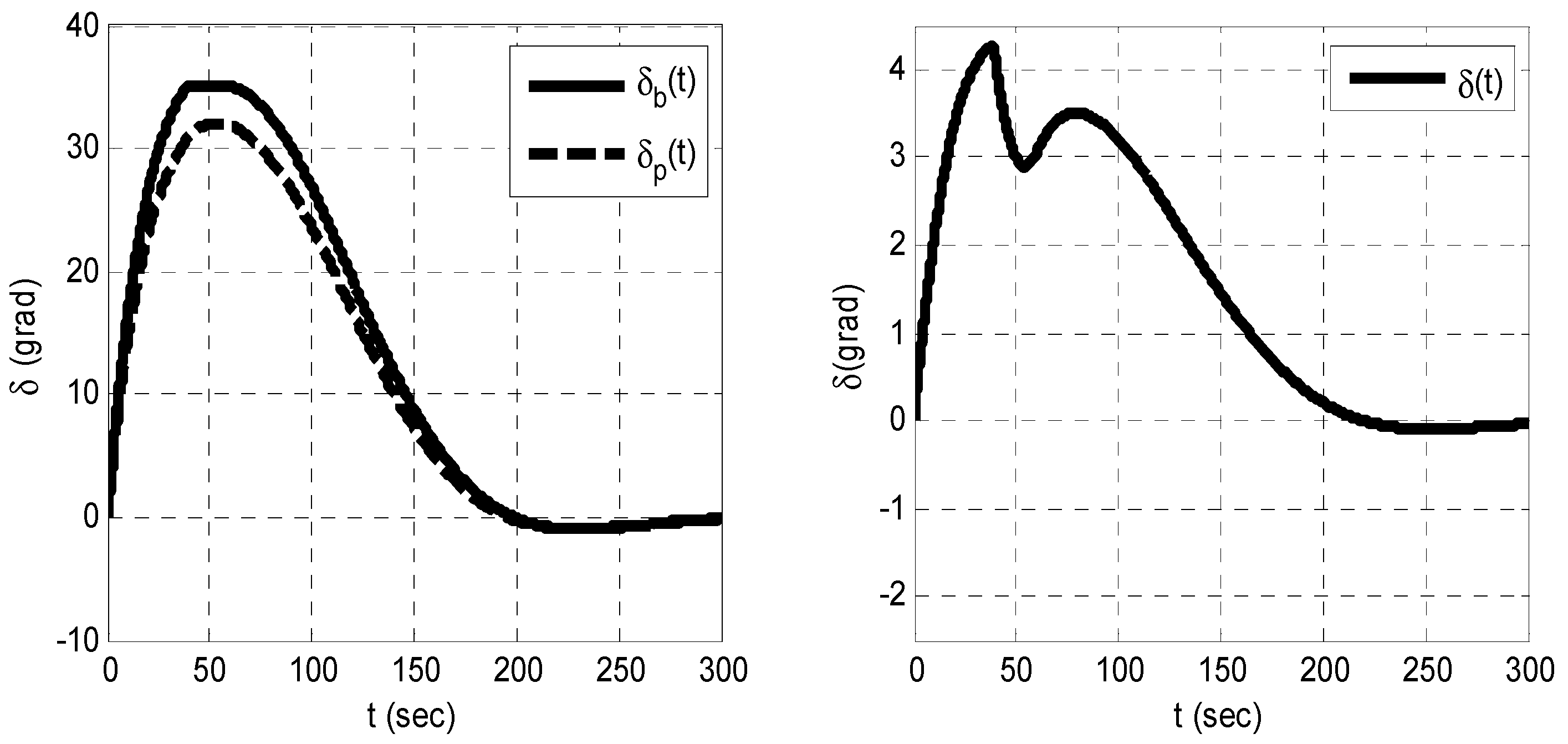
The results of simulation are presented in
Figure 4,
Figure 5 and
Figure 6 as the graphs of corresponding functions, which reflect control signals and the vessel’s state variables for the transient process. This process is determined by the aforementioned reference motion, which is realized with the help of the designed tracking controllers. Initial conditions for all variables are zero with the exception of forward speed and heading angle. By these variables, the initial conditions
and
are accepted to distinguish them from the reference motion.
Let us note that the dynamical quality of the presented transient process seems to be quite satisfactory. In addition, it is suitable to illustrate the dynamics of the closed-loop connection under the action of sea wave external disturbance.
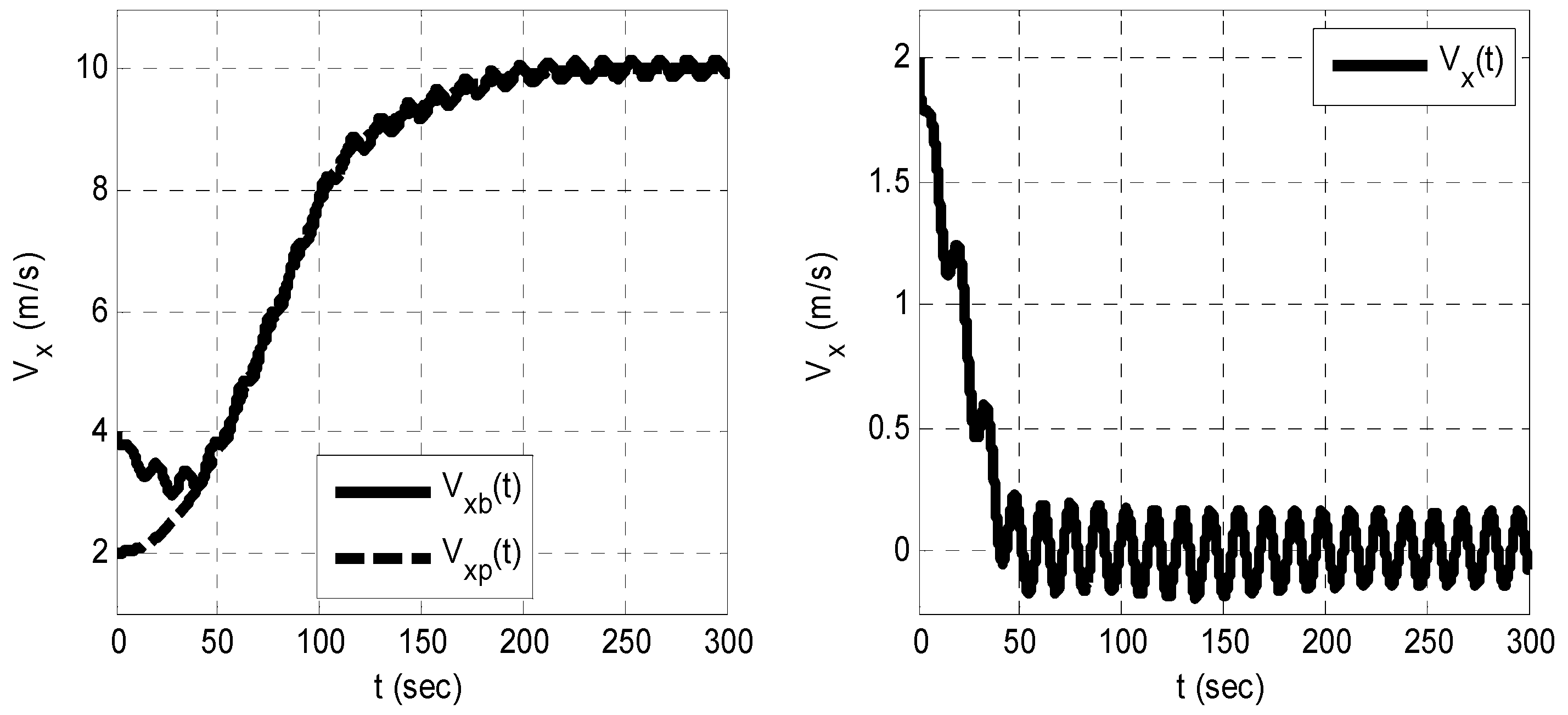
Figure 7 shows the same control process for the forward speed
, taking into account presence the approximate representation of sea waves with an intensity of 5 on the Beaufort scale.
Finally, let us analyze the stability of the closed-loop system (17), (35), (41) with synthesized tracking controllers. One can easily see that in order to provide aforementioned analysis, it is sufficient to consider the zero-equilibrium stability for the closed-loop system (27), (33) presented in deflections from the reference motion.
It is obvious that systems (27), (33) have zero equilibrium, and to investigate its stability features, let us introduces the following Lyapunov function candidate:
Here, the symmetrical matrix
is a solution of the algebraic Riccati equation, which is used in the range of LQR controller (37) synthesis:
Let us notice that the introduced function
satisfy the relationships
with the following
-class functions:
where
and
are the minimum and maximum eigenvalues of the matrix
, respectively.
Using the additional function
, one can check if the following inequality is valid
where
is a box, determined by the relationships:
Here, the variable
determines the relative width of the box
compared to the current values of the reference signals. This variable was increased to such a value that the condition (44) was met. The obtained value
seems to be still admissible in the range of (43), (44) [
4,
5], determining the region of the local uniform asymptotic stability for the reference motion, which is realized by tracking controllers (35), (41).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






