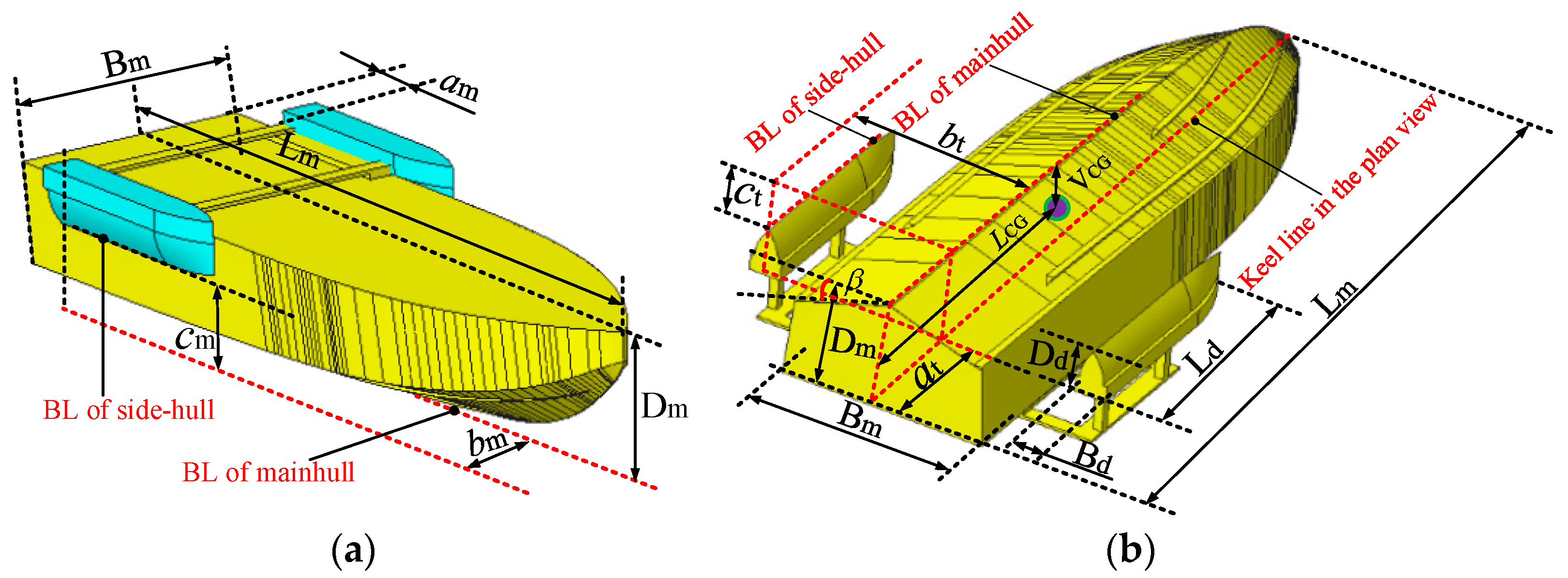
Figure 1.
Main geometric characteristics of the hull in different navigation states: (a) monomer-form state (MFS) and (b) trimaran-form state (TFS).
Figure 1.
Main geometric characteristics of the hull in different navigation states: (a) monomer-form state (MFS) and (b) trimaran-form state (TFS).
Figure 2.
Molded lines of the model: (a) main hull; (b) side-hull.
Figure 2.
Molded lines of the model: (a) main hull; (b) side-hull.
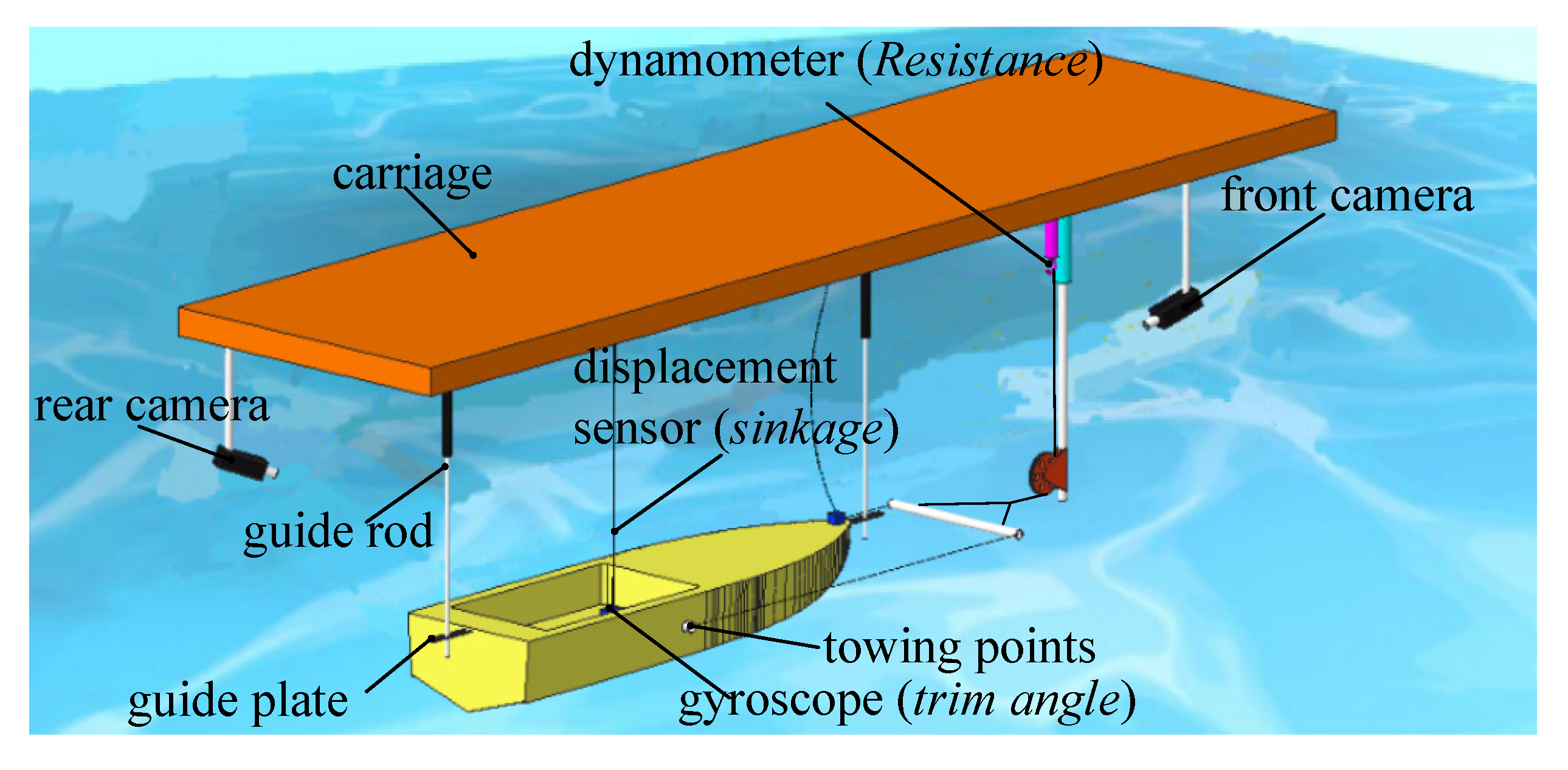
Figure 3.
Schematic diagram of the experimental setup.
Figure 3.
Schematic diagram of the experimental setup.
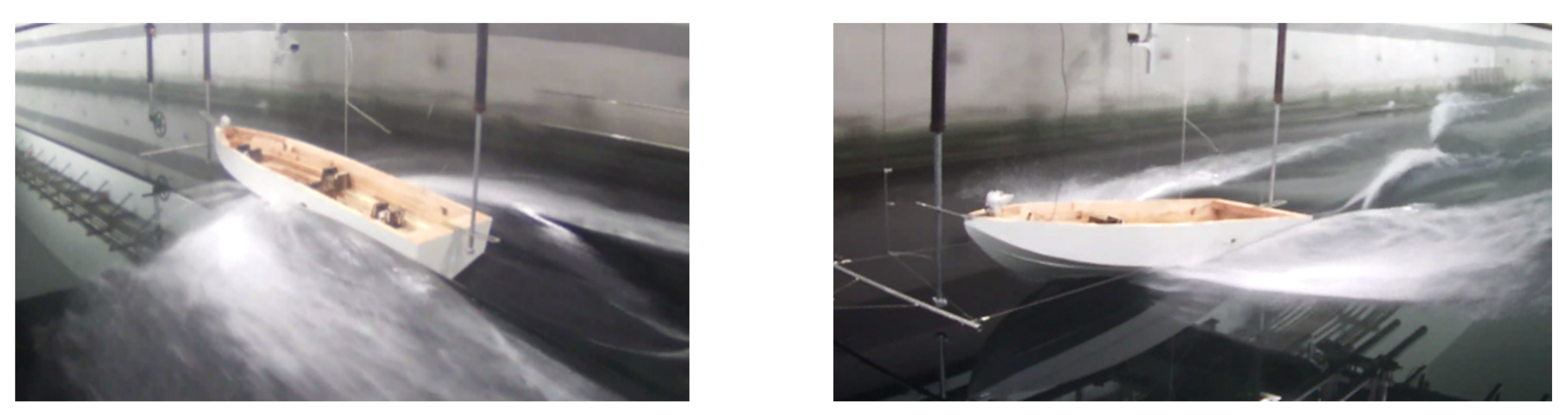
Figure 4.
Photographs of the monomer-form model.
Figure 4.
Photographs of the monomer-form model.
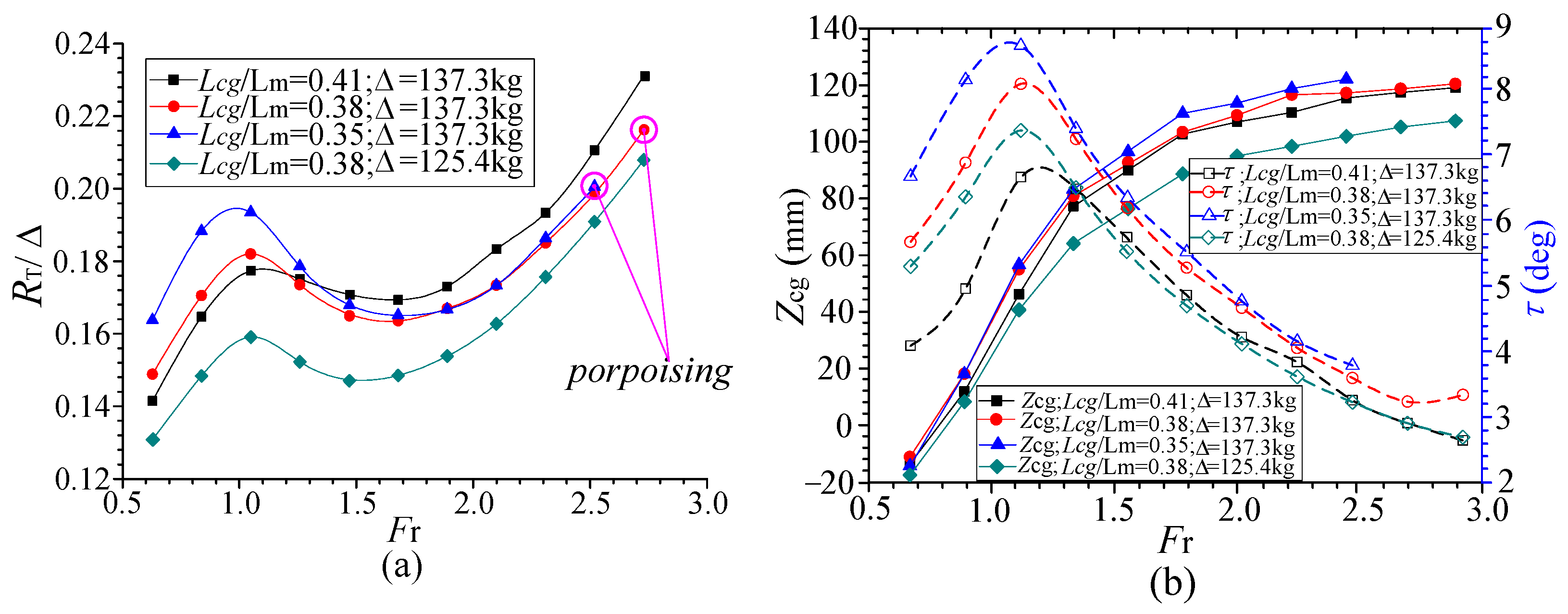
Figure 5.
Test results of the monomer-form model: (a) total resistance; (b) sinkage and trim angle.
Figure 5.
Test results of the monomer-form model: (a) total resistance; (b) sinkage and trim angle.
Figure 6.
Solver procedure of the numerical method.
Figure 6.
Solver procedure of the numerical method.
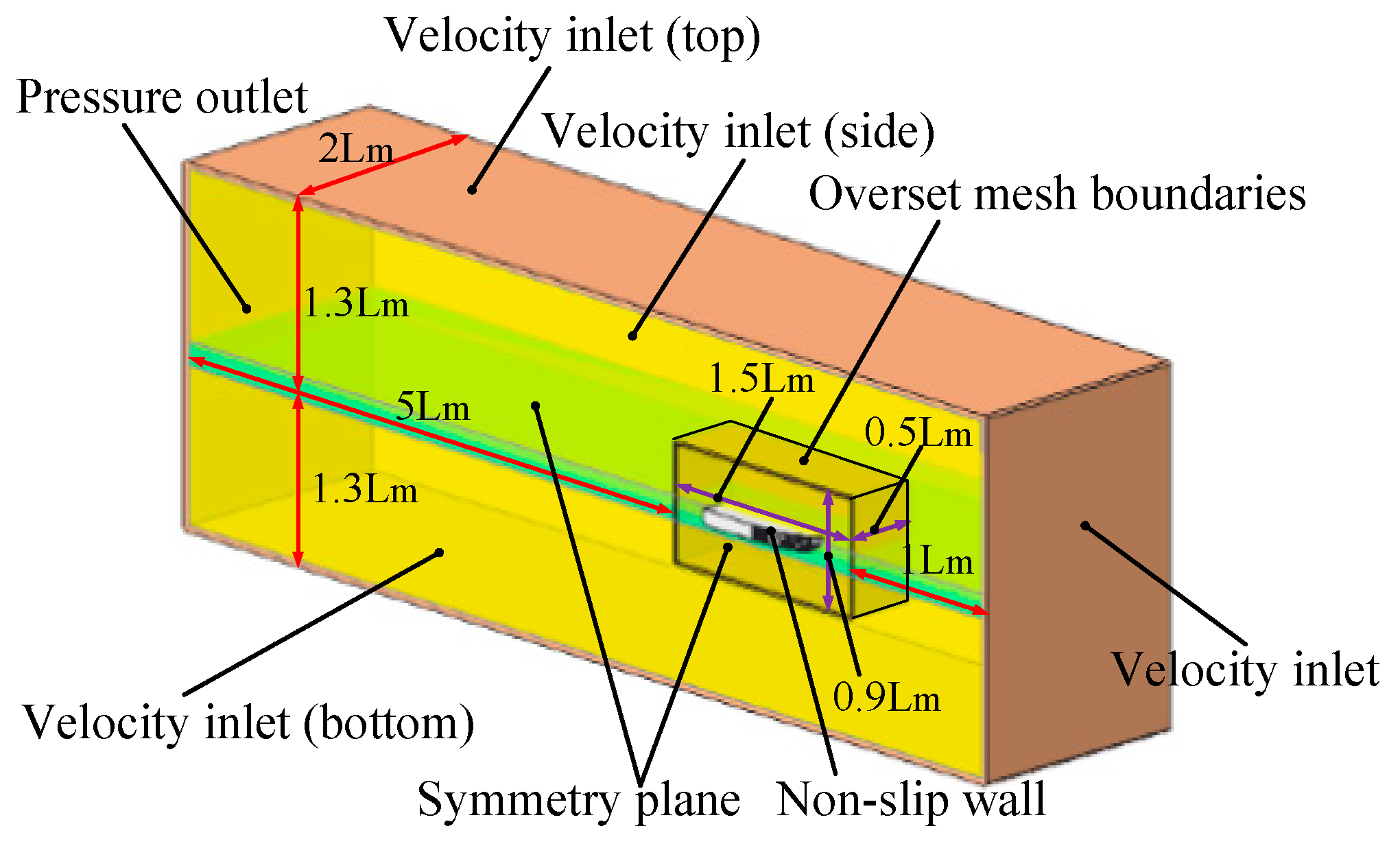
Figure 7.
Dimensions and boundary conditions in the domain.
Figure 7.
Dimensions and boundary conditions in the domain.
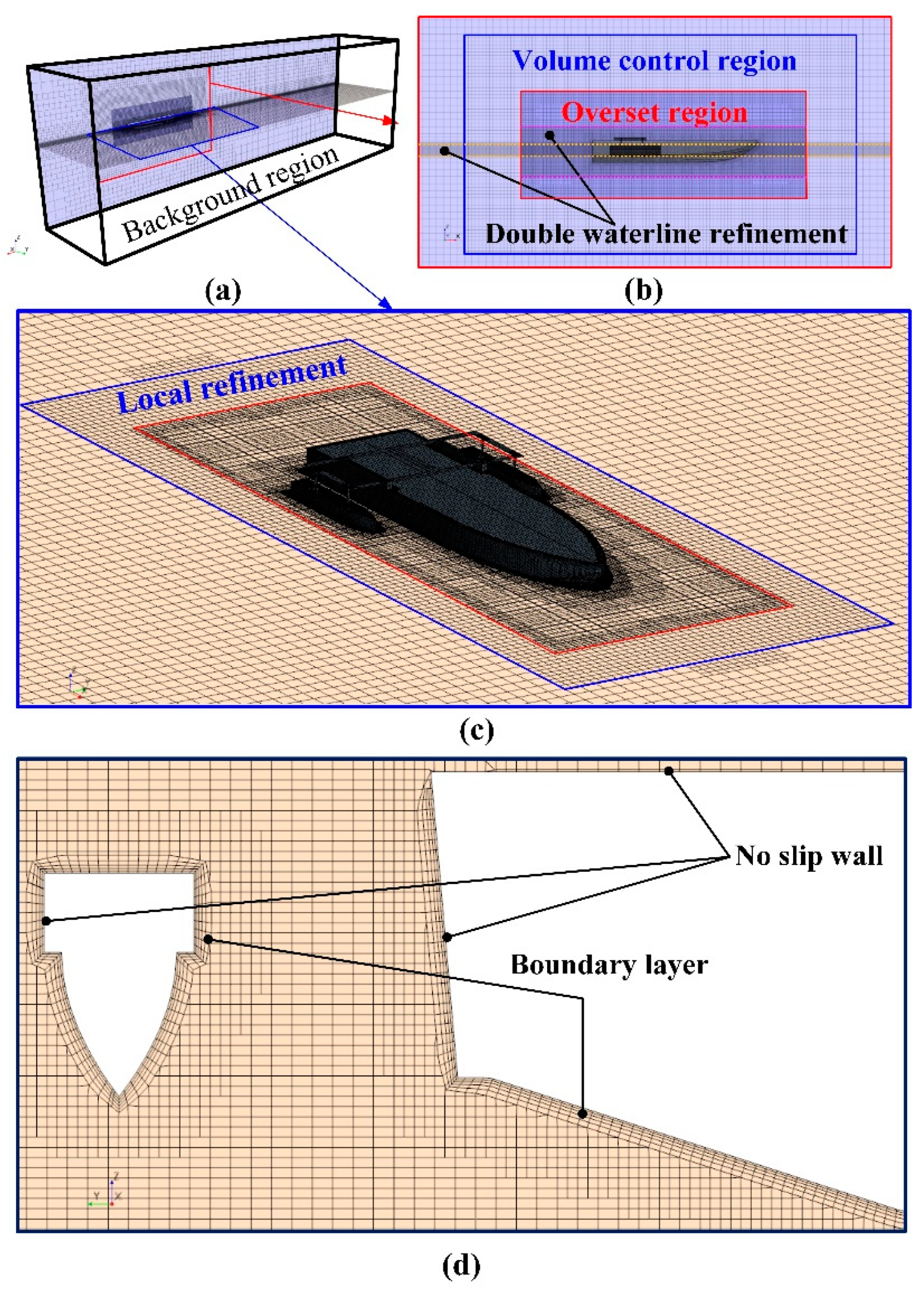
Figure 8.
Detailed grid partition of the entire computational domain: (a) axis view; (b) front view; (c) vertical view; (d) partial view.
Figure 8.
Detailed grid partition of the entire computational domain: (a) axis view; (b) front view; (c) vertical view; (d) partial view.
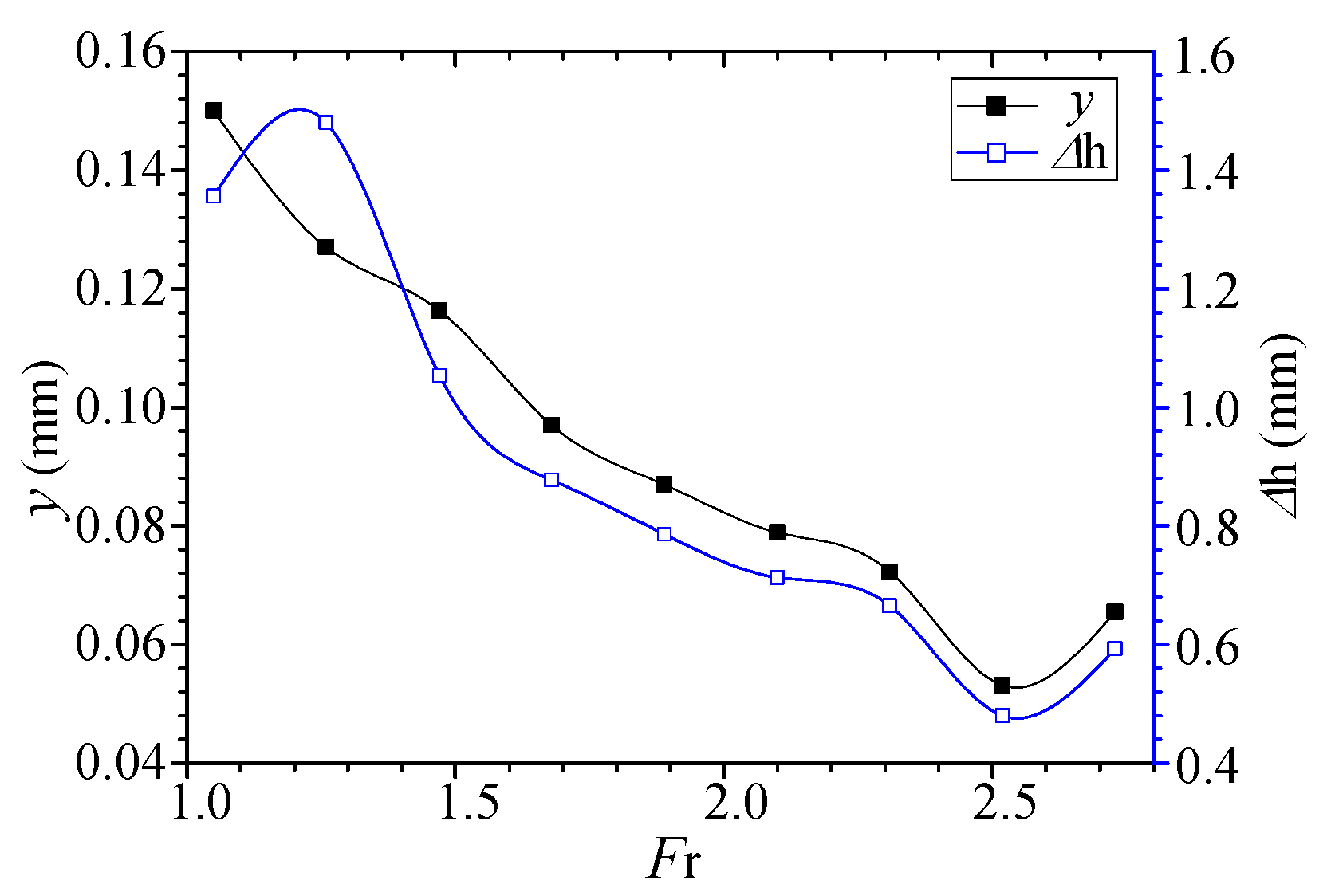
Figure 9.
The height of the first layer grid (y) values and total thicknesses of the boundary layer grid at different speeds.
Figure 9.
The height of the first layer grid (y) values and total thicknesses of the boundary layer grid at different speeds.
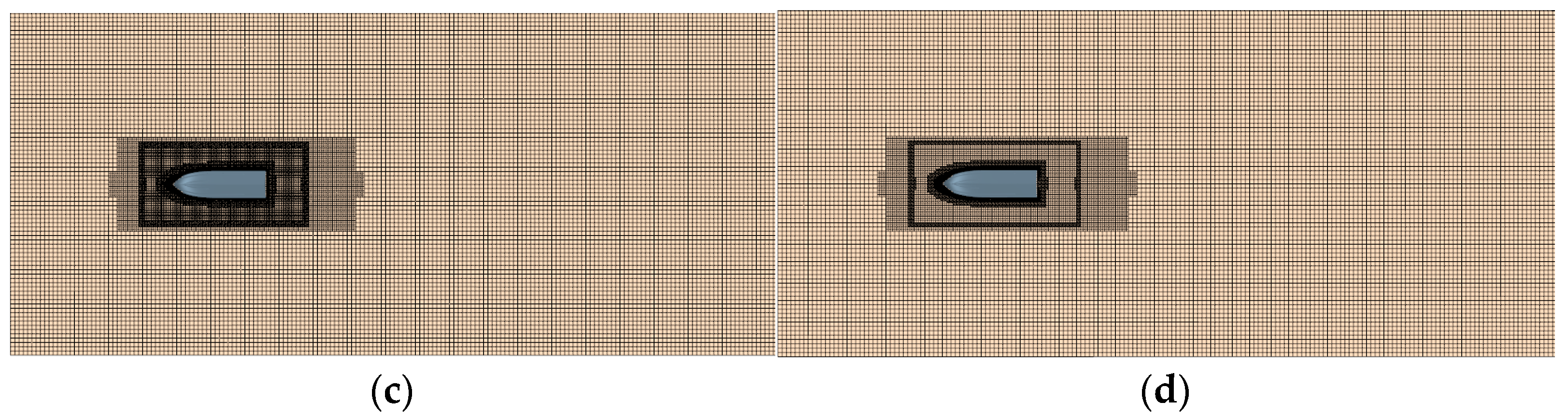
Figure 10.
The four designed grids: (a) grid 4, (b) grid 3, (c) grid 2, (d) grid 1.
Figure 10.
The four designed grids: (a) grid 4, (b) grid 3, (c) grid 2, (d) grid 1.
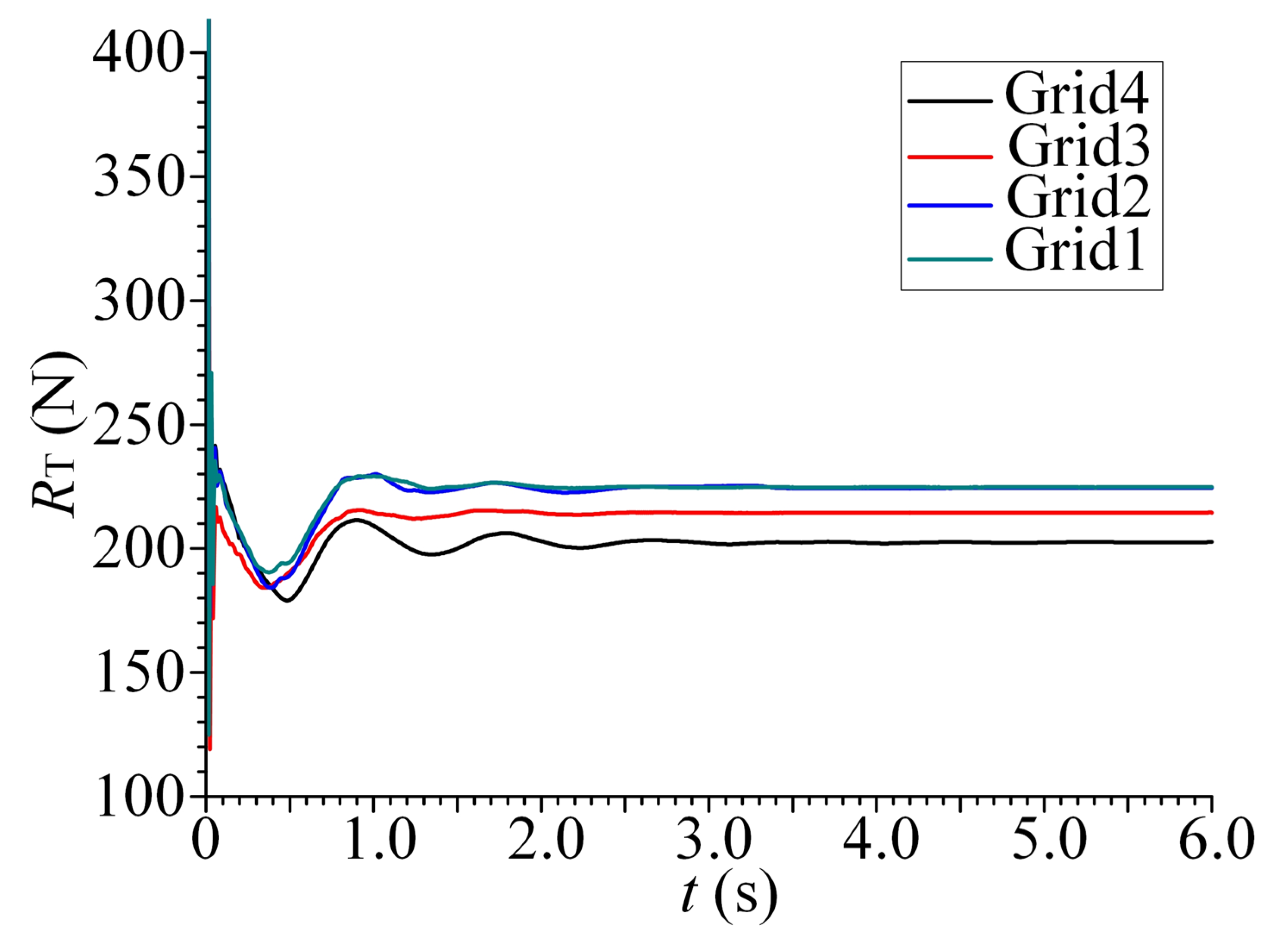
Figure 11.
Resistance curves of the different grids.
Figure 11.
Resistance curves of the different grids.
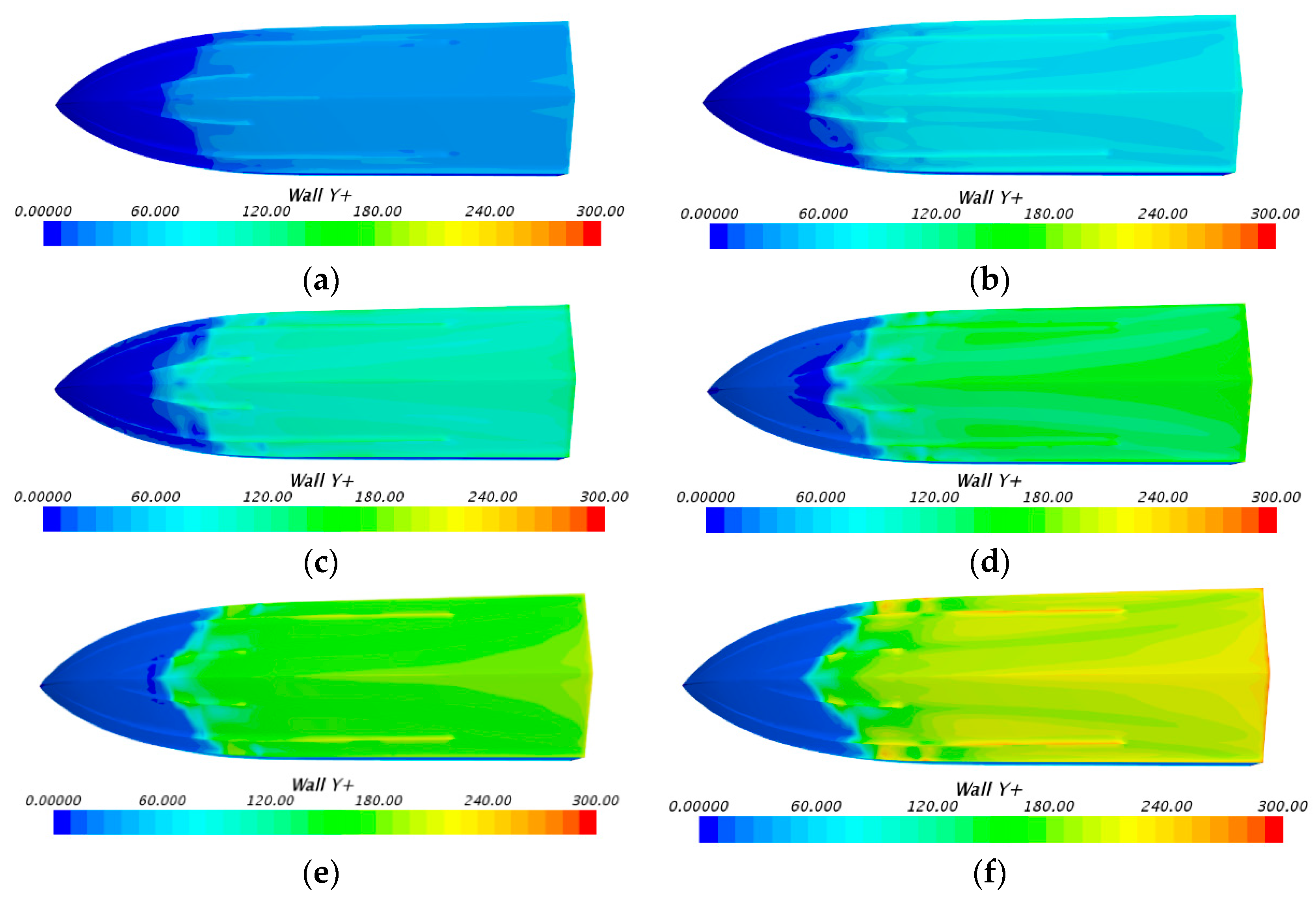
Figure 12.
Wall non-dimensional distance of the first layer grid (y+) after calculation: (a) y+ = 50; (b) y+ = 100; (c) y+ = 150; (d) y+ = 200; (e) y+ = 250; (f) y+ = 300.
Figure 12.
Wall non-dimensional distance of the first layer grid (y+) after calculation: (a) y+ = 50; (b) y+ = 100; (c) y+ = 150; (d) y+ = 200; (e) y+ = 250; (f) y+ = 300.
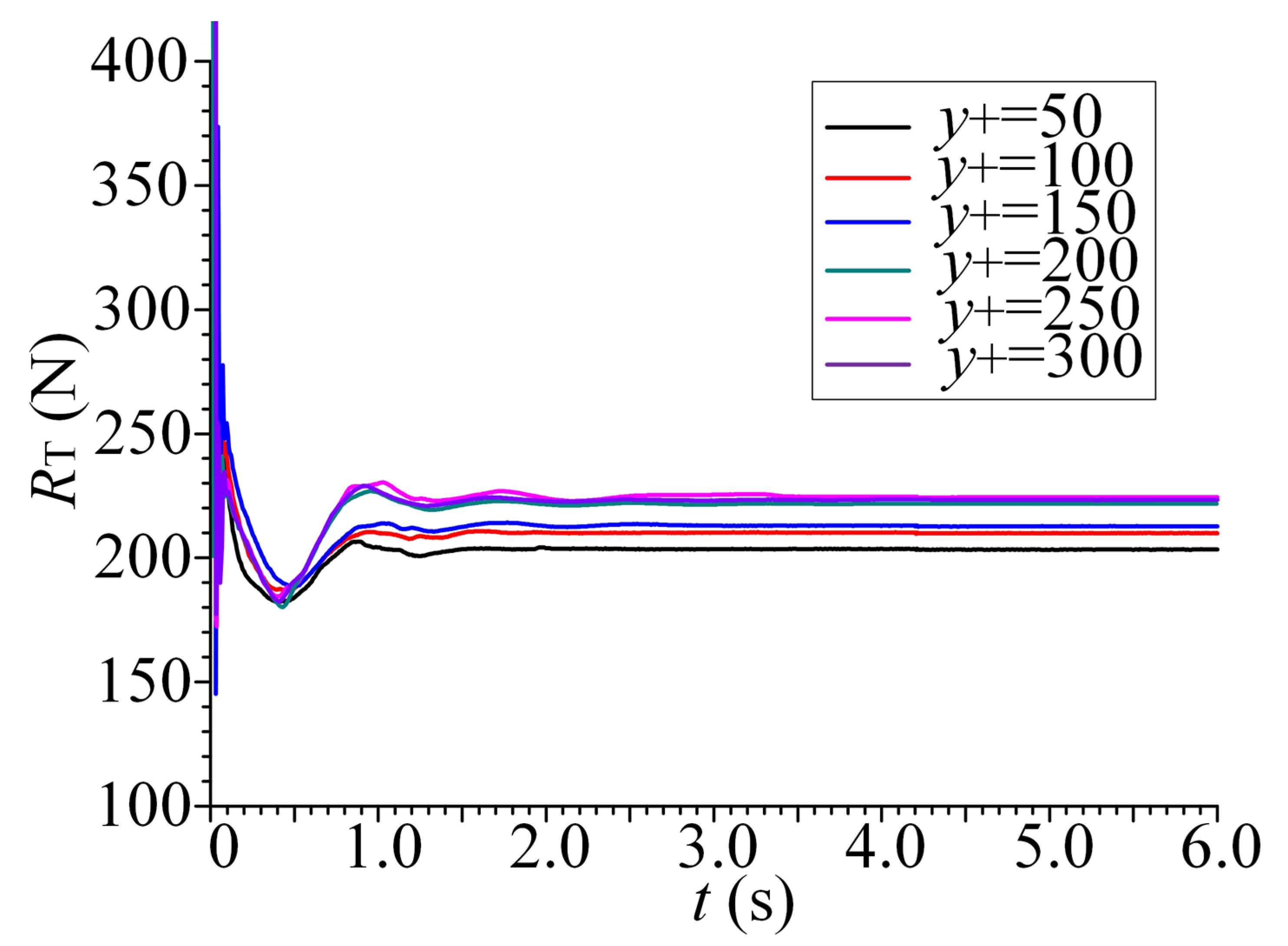
Figure 13.
Resistance curves of the different y+.
Figure 13.
Resistance curves of the different y+.
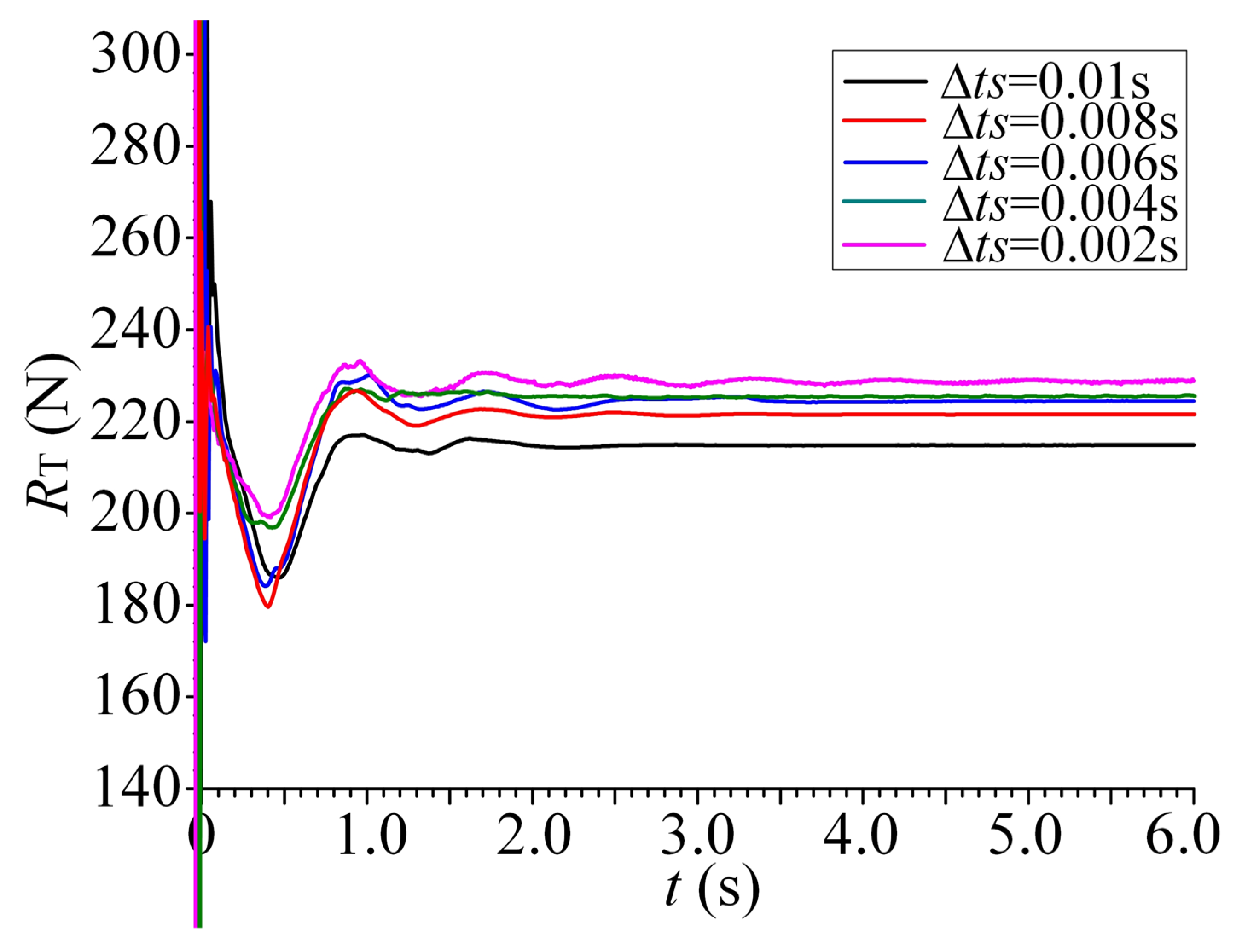
Figure 14.
Resistance curves of the different time steps.
Figure 14.
Resistance curves of the different time steps.
Figure 15.
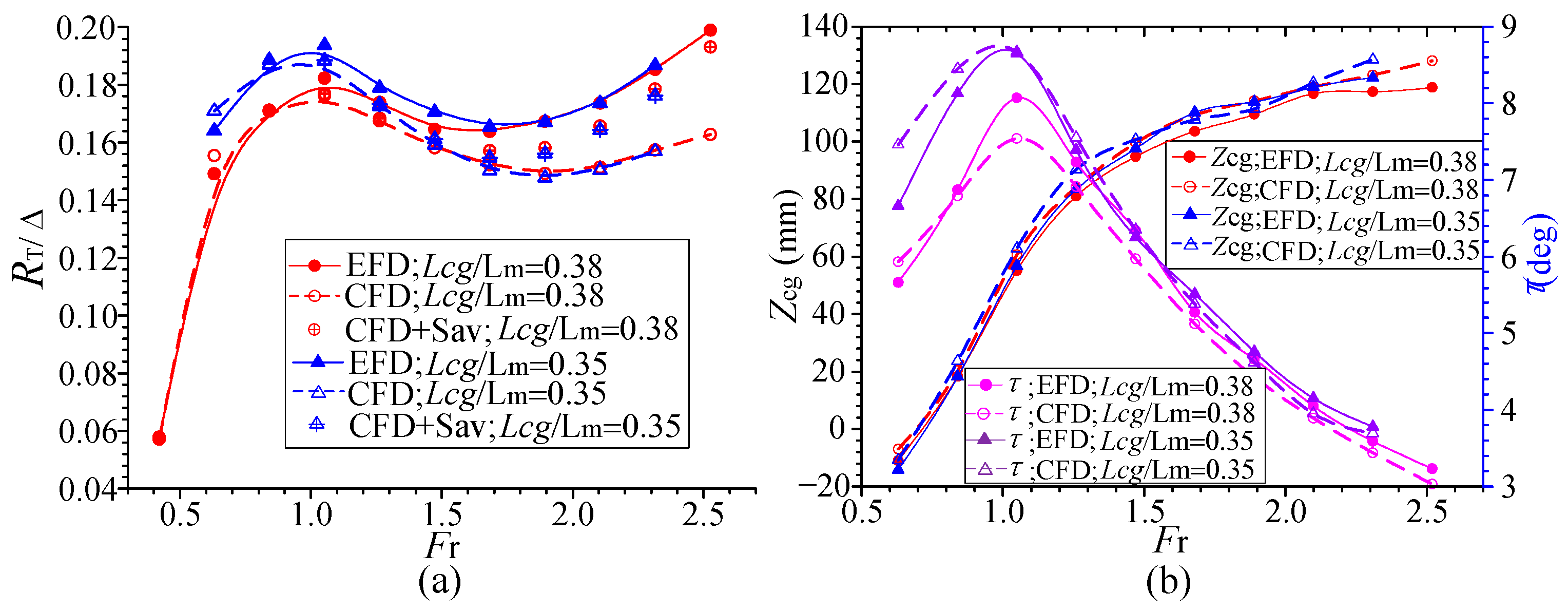
Comparison between EFD and CFD results for (a) total resistance RT and the RT added to the whisker spray resistance, (b) sinkage and trim angle.
Figure 15.
Comparison between EFD and CFD results for (a) total resistance RT and the RT added to the whisker spray resistance, (b) sinkage and trim angle.
Figure 16.
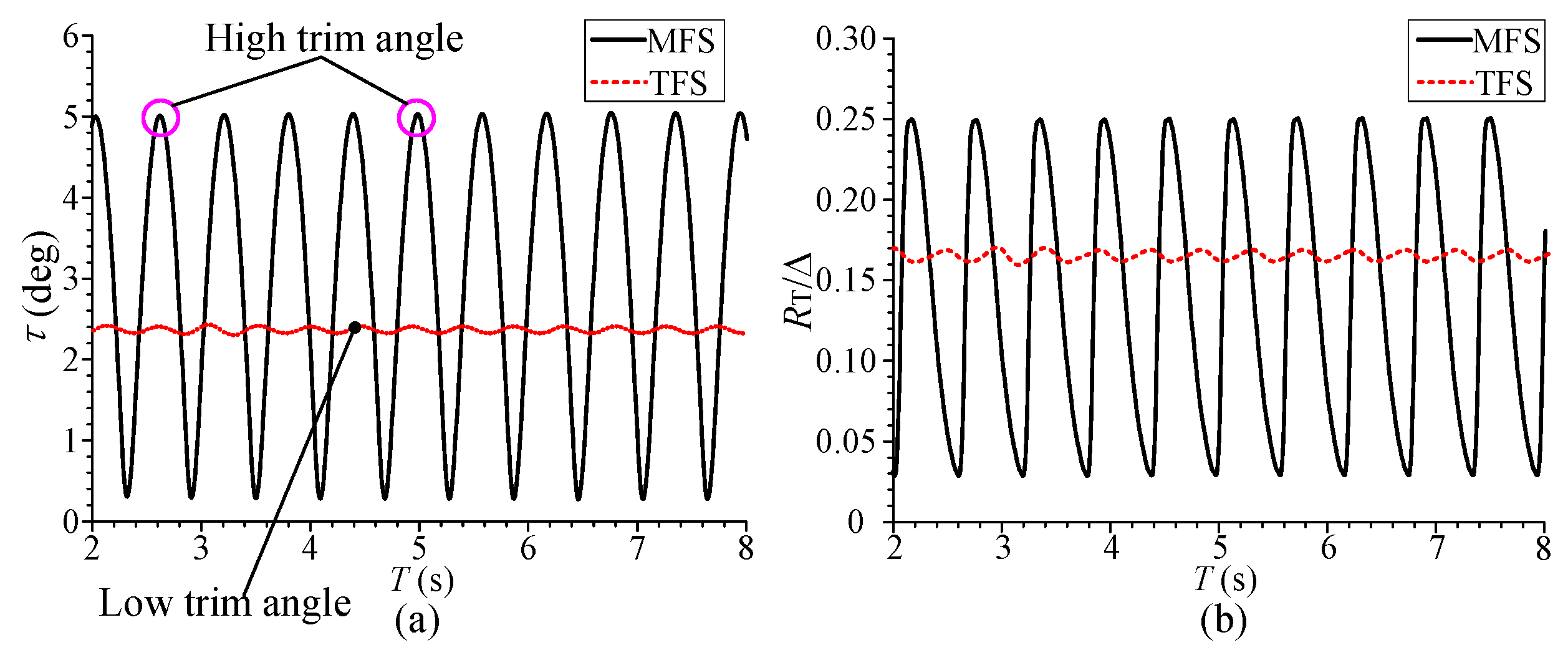
Oscillation comparisons when Lcg/Lm = 0.38: (a) trim angle; (b) total resistance.
Figure 16.
Oscillation comparisons when Lcg/Lm = 0.38: (a) trim angle; (b) total resistance.
Figure 17.
Comparisons of the hull bottom pressure in the MFS and TFS when Lcg/Lm = 0.38.
Figure 17.
Comparisons of the hull bottom pressure in the MFS and TFS when Lcg/Lm = 0.38.
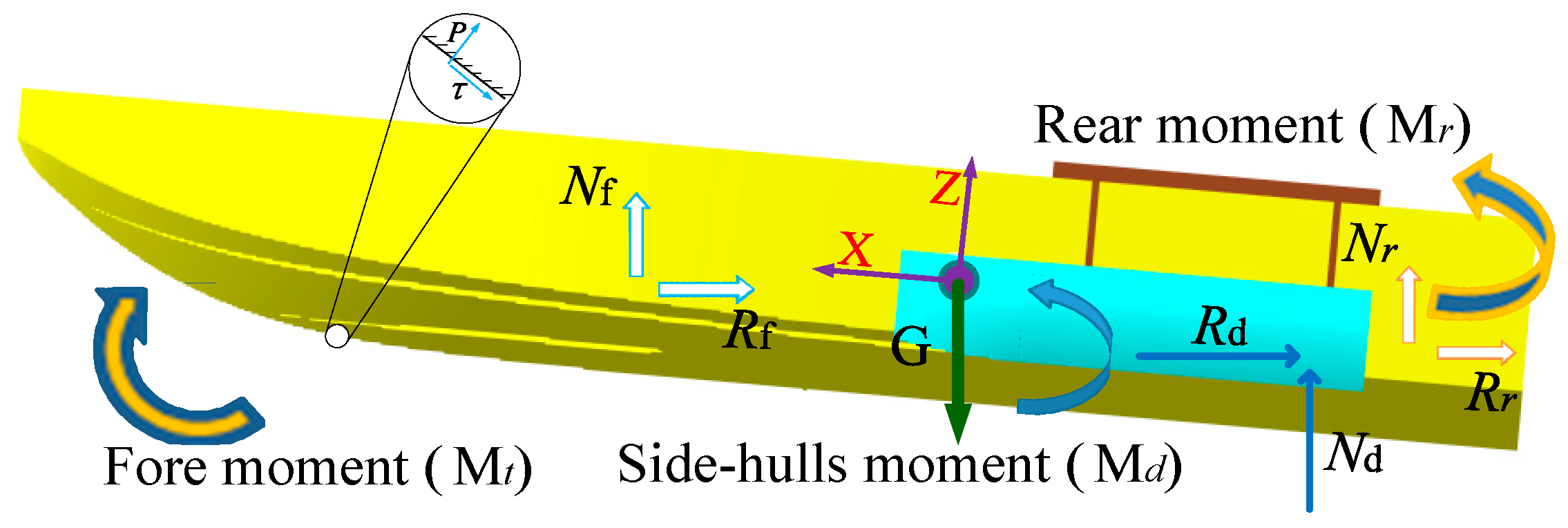
Figure 18.
Forces and moment acted on the hull surface in the TFS.
Figure 18.
Forces and moment acted on the hull surface in the TFS.
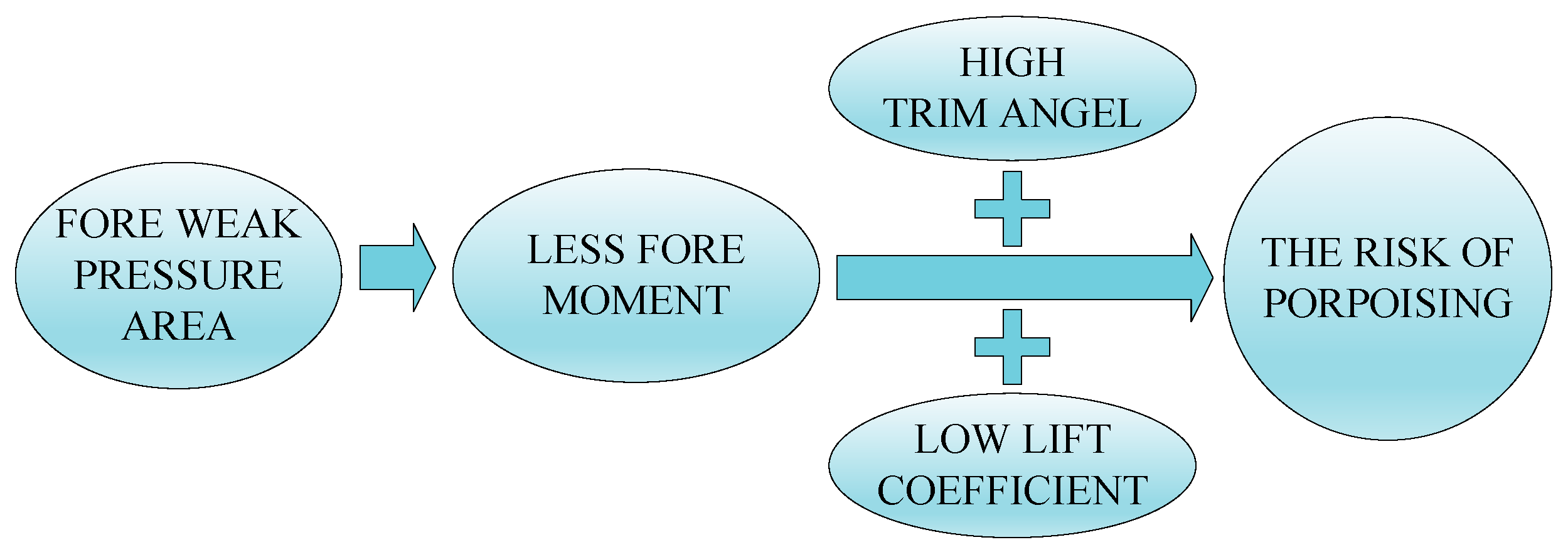
Figure 19.
Why porpoising occurs.
Figure 19.
Why porpoising occurs.
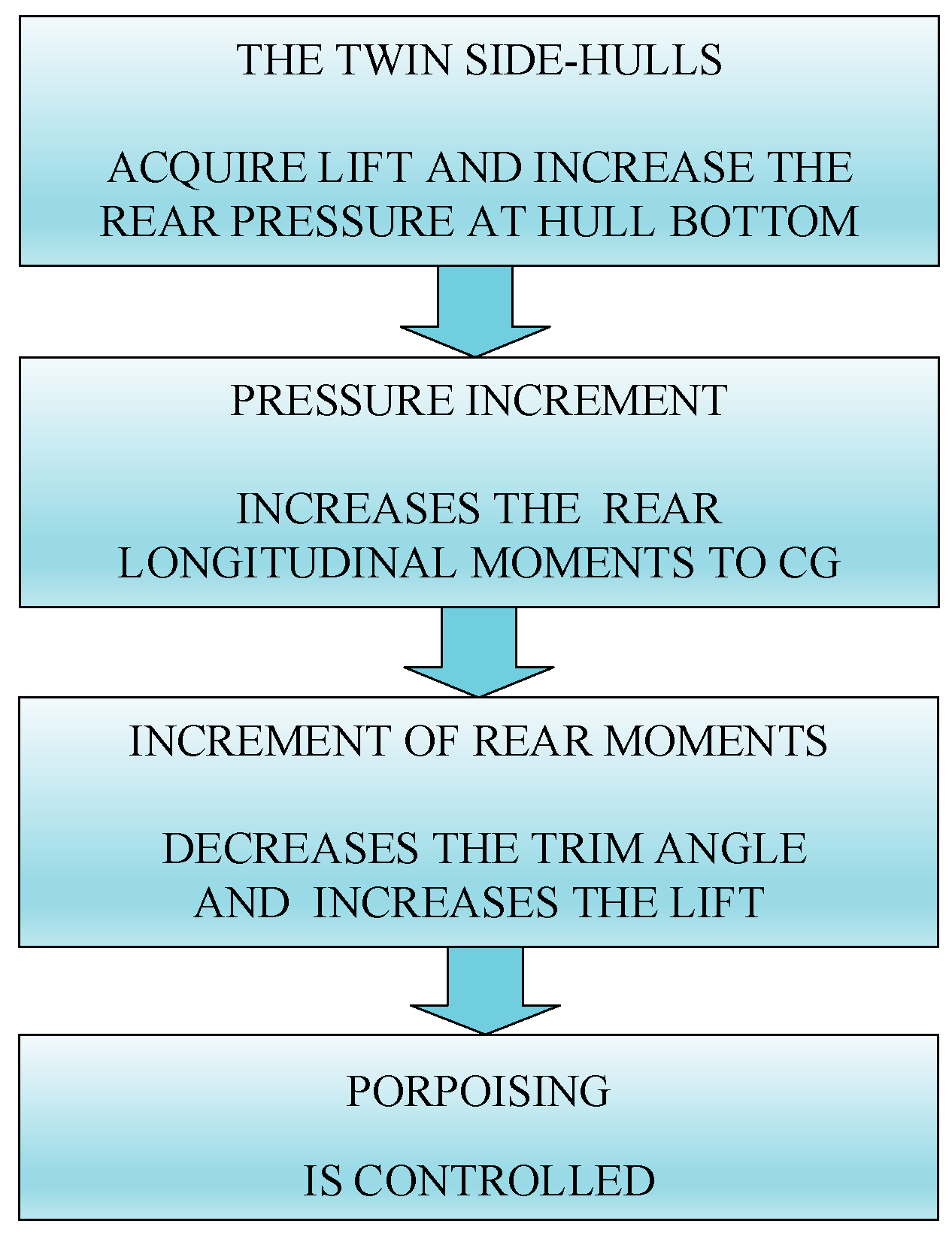
Figure 20.
How side-hulls inhibit porpoising.
Figure 20.
How side-hulls inhibit porpoising.
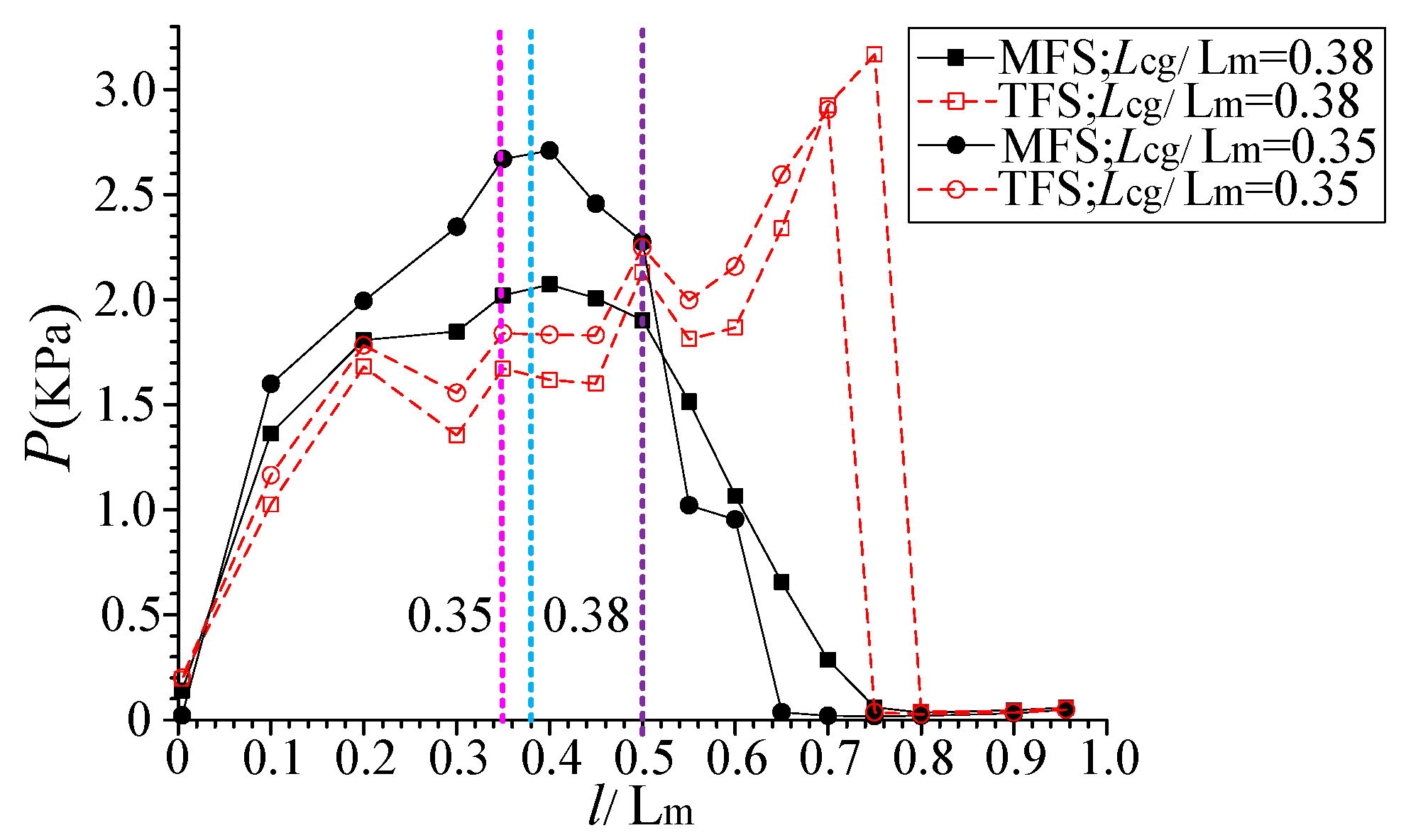
Figure 21.
Pressure distribution from stern to bow on keel line in the MFS and TFS.
Figure 21.
Pressure distribution from stern to bow on keel line in the MFS and TFS.
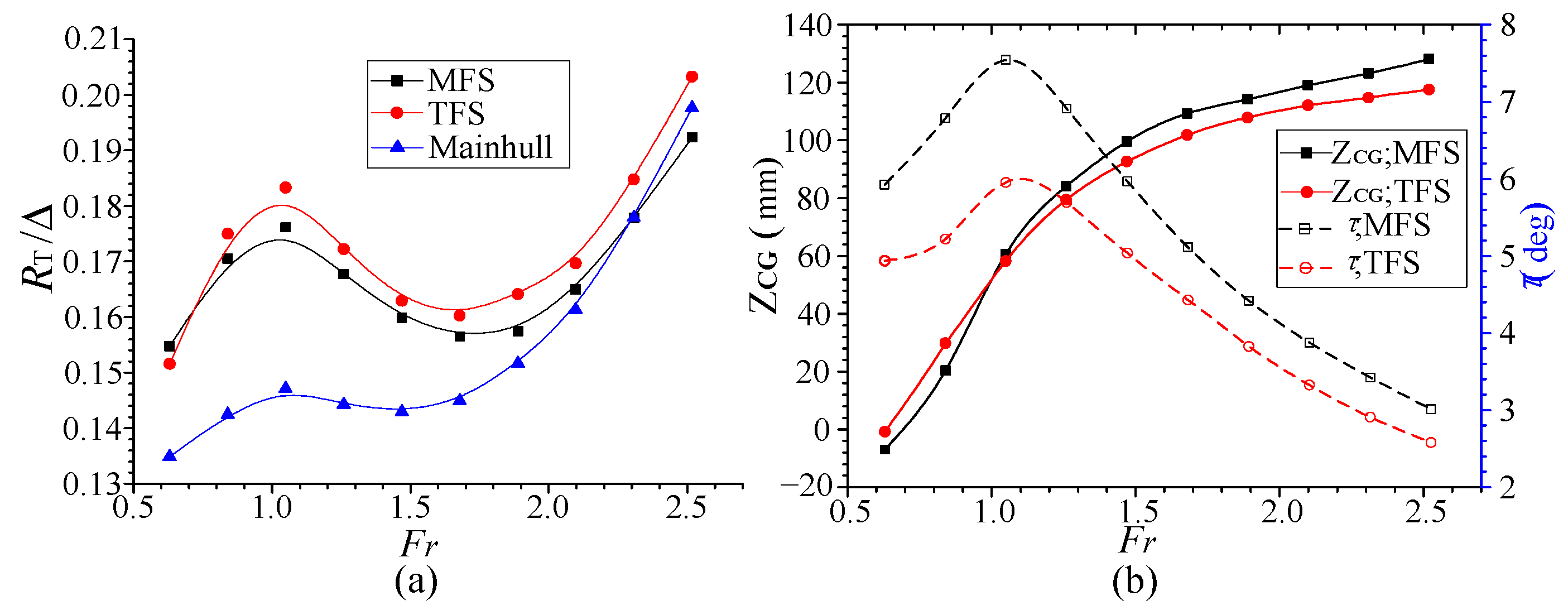
Figure 22.
Change in total resistance and sailing attitudes with speed when Lcg/Lm = 0.38: (a) total resistance; (b) sinkage and trim angle.
Figure 22.
Change in total resistance and sailing attitudes with speed when Lcg/Lm = 0.38: (a) total resistance; (b) sinkage and trim angle.
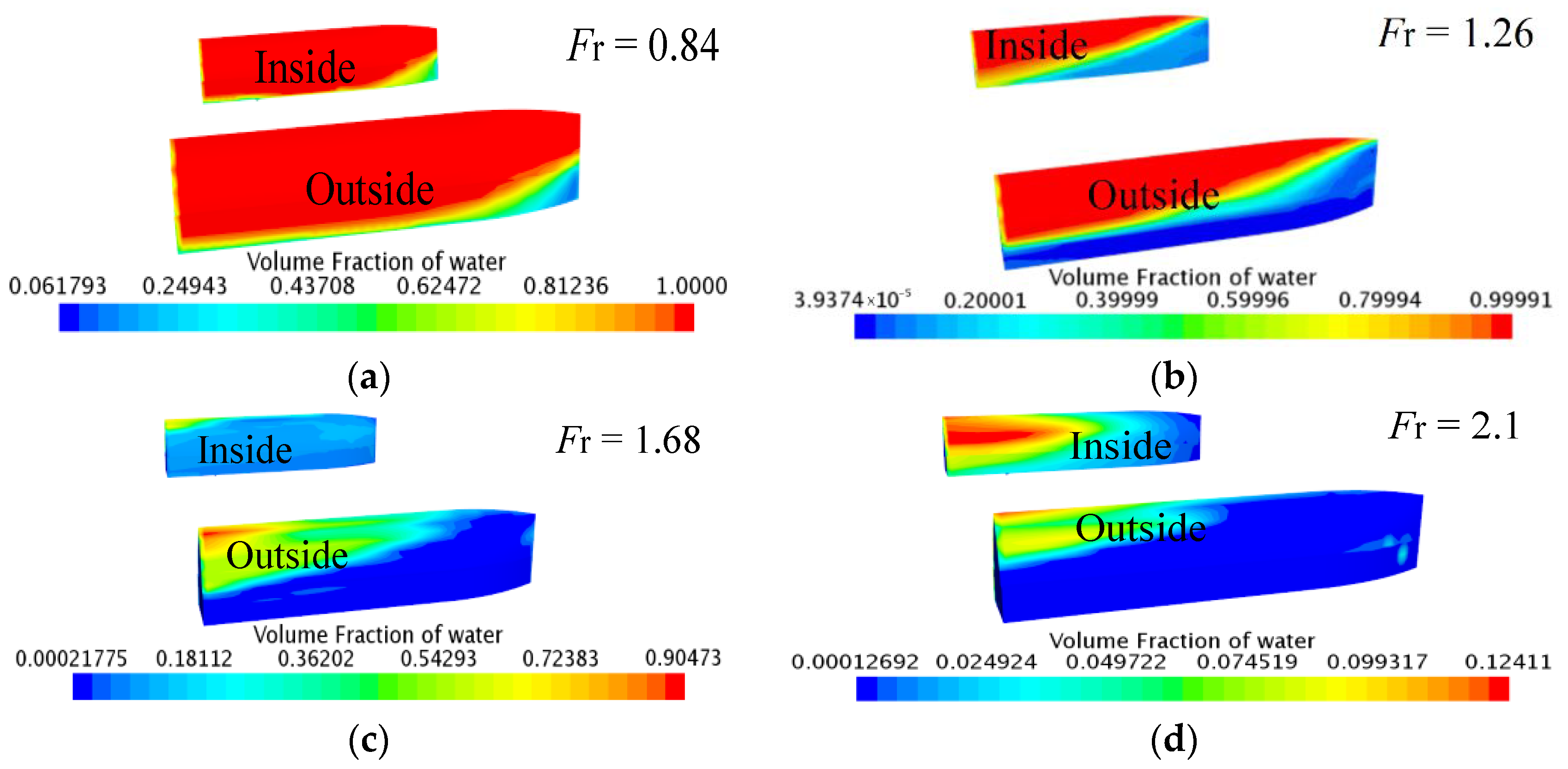
Figure 23.
Volume fraction of water for the twin side-hulls at different speeds: (a) Fr = 0.84; (b) Fr = 1.26; (c) Fr = 1.68; (d) Fr = 2.1.
Figure 23.
Volume fraction of water for the twin side-hulls at different speeds: (a) Fr = 0.84; (b) Fr = 1.26; (c) Fr = 1.68; (d) Fr = 2.1.
Figure 24.
Forces and moment acted on the hull in the TFS at different speeds: (a) resistance and moment of the side-hulls; (b) lift of the side-hulls and the main hull.
Figure 24.
Forces and moment acted on the hull in the TFS at different speeds: (a) resistance and moment of the side-hulls; (b) lift of the side-hulls and the main hull.
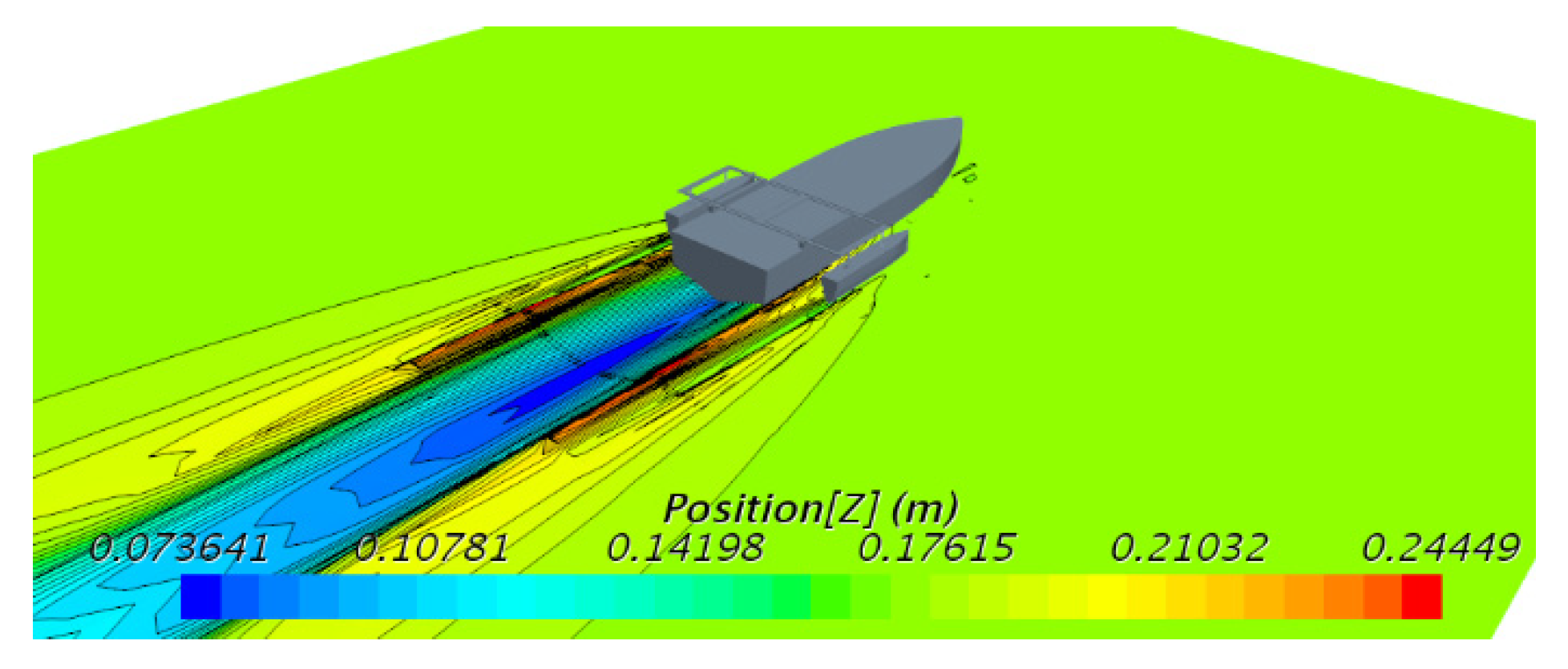
Figure 25.
The free surface of the vessel in the TFS when porpoising.
Figure 25.
The free surface of the vessel in the TFS when porpoising.
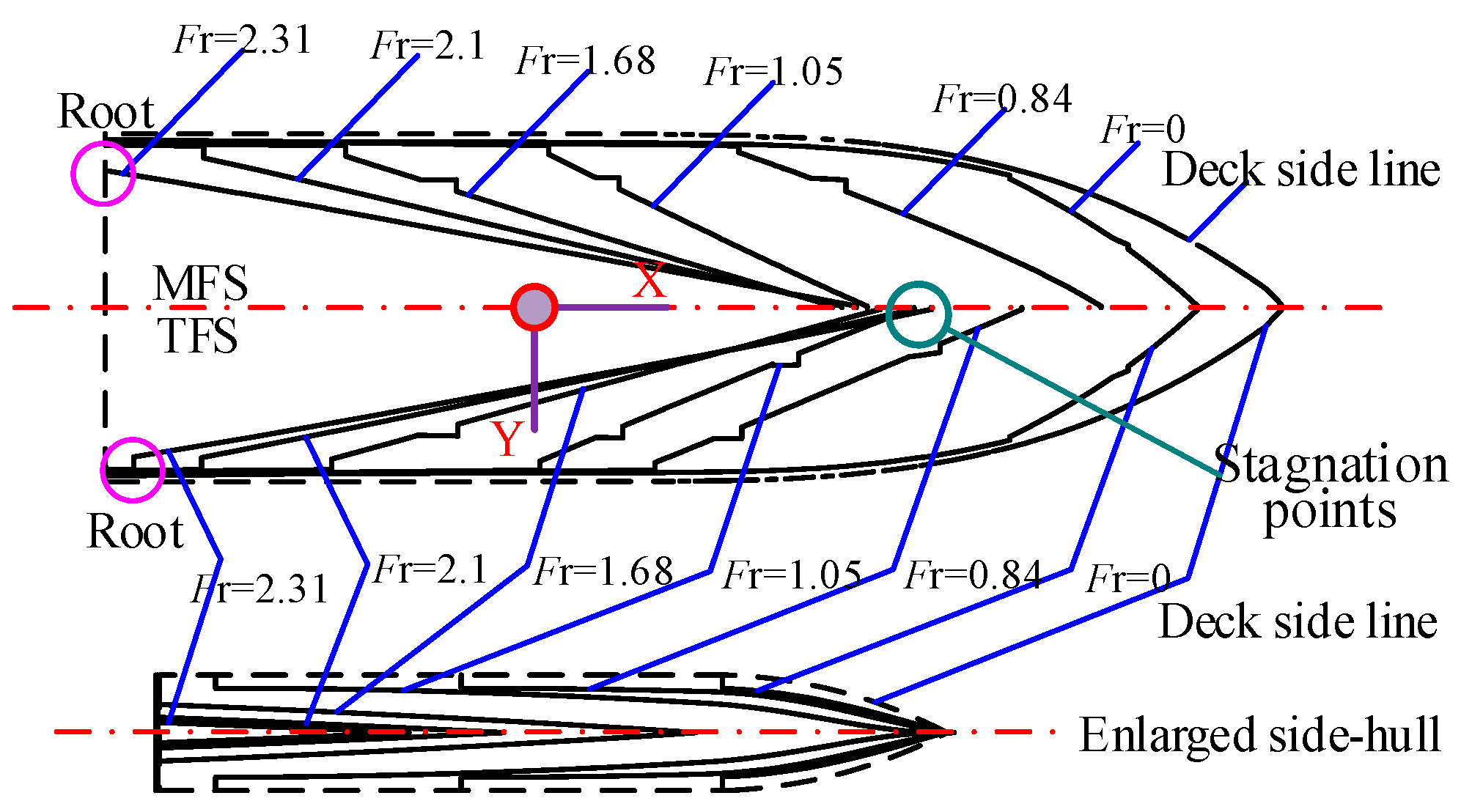
Figure 26.
Waterline surface comparisons of the two navigation states when Lcg/Lm = 0.35.
Figure 26.
Waterline surface comparisons of the two navigation states when Lcg/Lm = 0.35.
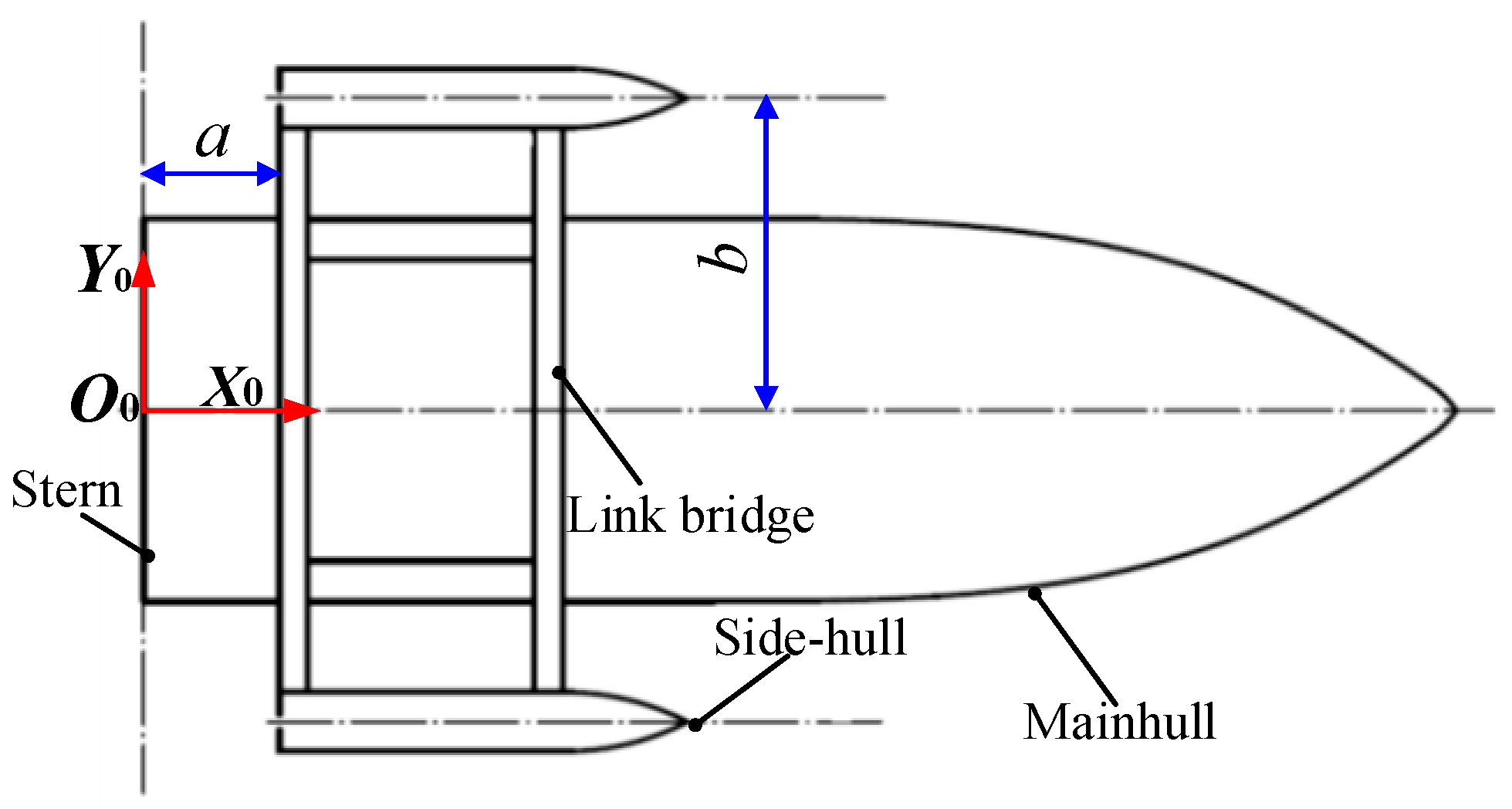
Figure 27.
Longitudinal adjustment mode of the twin side-hulls.
Figure 27.
Longitudinal adjustment mode of the twin side-hulls.
Figure 28.
Different (a) longitudinal locations; (b) vertical locations of the side-hulls in the TFS.
Figure 28.
Different (a) longitudinal locations; (b) vertical locations of the side-hulls in the TFS.
Figure 29.
Vertical adjustment mode of the twin side-hulls.
Figure 29.
Vertical adjustment mode of the twin side-hulls.
Figure 30.
The optimal, weak, and unfit locations: (a) trim angle; (b) half total resistance.
Figure 30.
The optimal, weak, and unfit locations: (a) trim angle; (b) half total resistance.
Figure 31.
Optimization of longitudinal and vertical side-hull locations on porpoising instability inhibition and resistance reduction.
Figure 31.
Optimization of longitudinal and vertical side-hull locations on porpoising instability inhibition and resistance reduction.
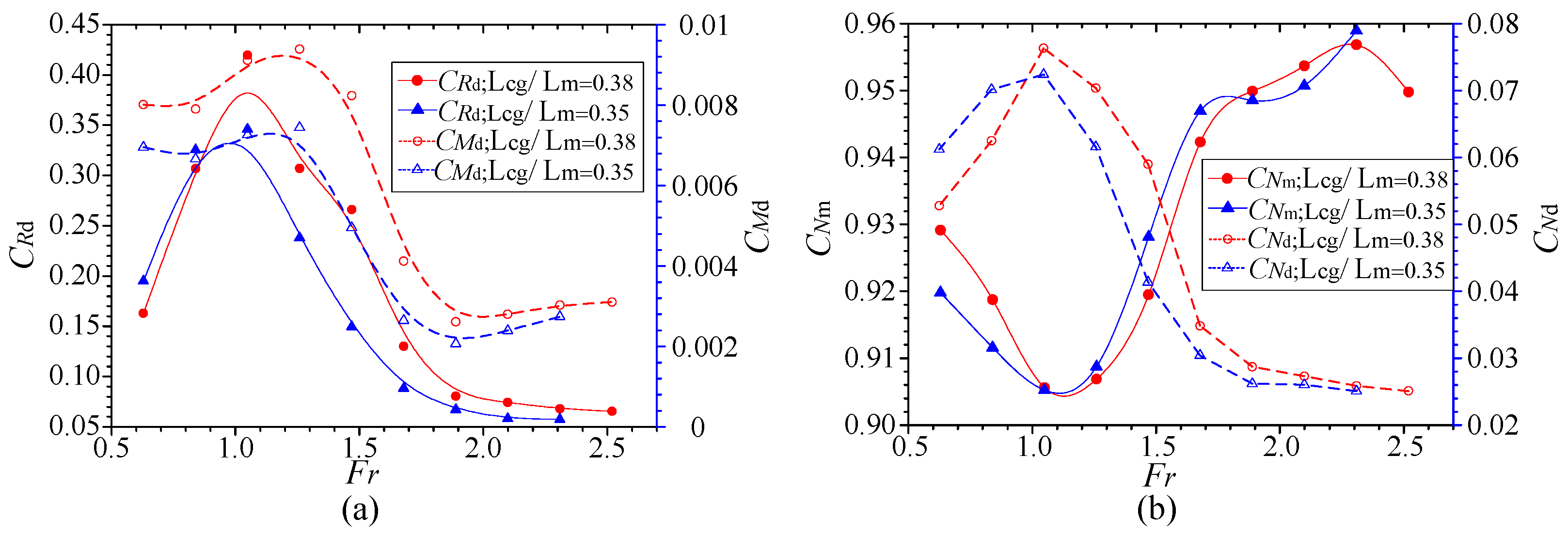
Figure 32.
Influence of the longitudinal and vertical side-hull locations on (a) Cτ, (b) CRa, (c) CRd, (d) Rd/RT, (e) CMd, and (f) CNd.
Figure 32.
Influence of the longitudinal and vertical side-hull locations on (a) Cτ, (b) CRa, (c) CRd, (d) Rd/RT, (e) CMd, and (f) CNd.
Figure 33.
Oscillation comparisons of (a) τ and (b) Zcg when porpoising under condition 2.
Figure 33.
Oscillation comparisons of (a) τ and (b) Zcg when porpoising under condition 2.
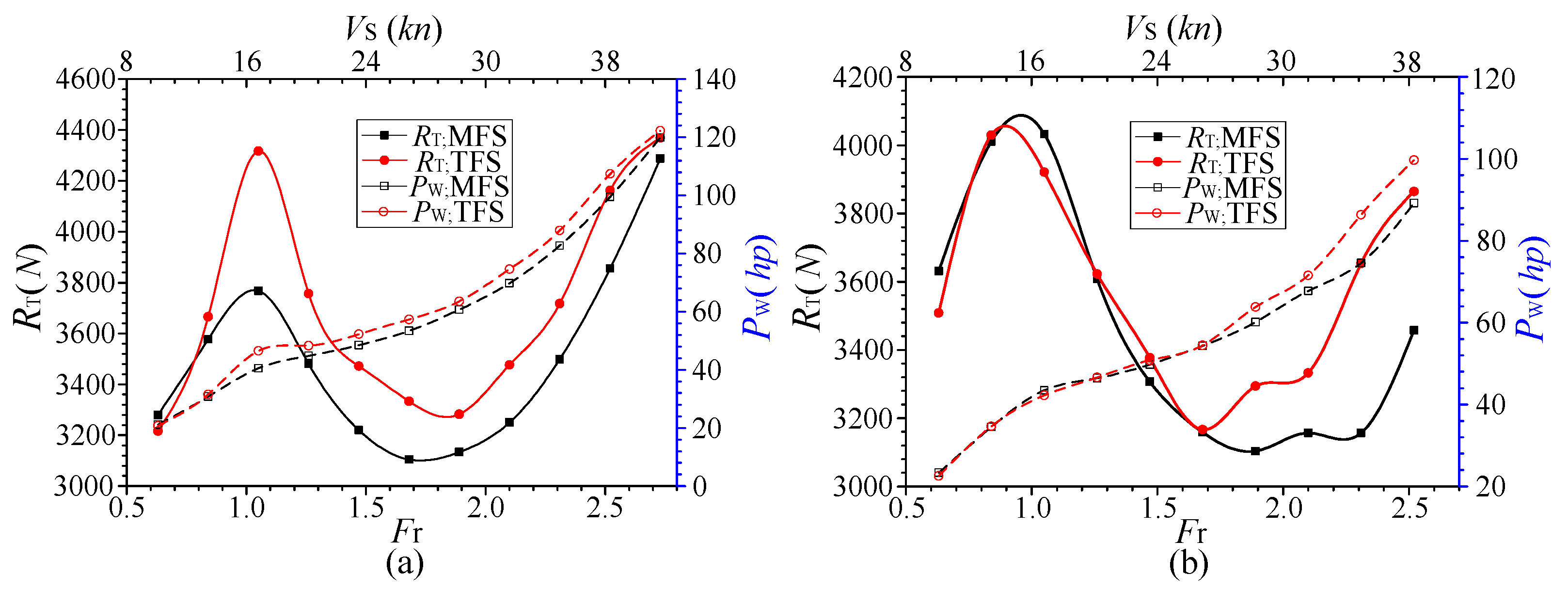
Figure 34.
The RT, power (PW) curves of the real ship in the MFS and TFS under (a) condition two, (b) condition 3.
Figure 34.
The RT, power (PW) curves of the real ship in the MFS and TFS under (a) condition two, (b) condition 3.
Table 1.
Primary geometric details of the planing hull at each navigation state.
Table 1.
Primary geometric details of the planing hull at each navigation state.
| Main Feature | Symbol | Value |
|---|
| Monomer-form state (MFS) |
| Main hull length (m) | Lm | 2.3 |
| Main hull breadth (m) | Bm | 0.702 |
| Main hull depth (m) | Tm | 0.357 |
| Main hull draft (m) | Dm | 0.168 |
| Design waterline length (m) | Lwl | 2.201 |
| Original fixed location of side-hull in the longitudinal, horizontal and vertical direction (m) | am | 0.23 |
| bm | 0.38 |
| cm | 0.26 |
| Main hull deadrise angle (°) |
θ
m | 18 |
| Displacement of main hull (kg) |
∆m | 122.4/137.3 |
| Inertia tensor of main hull (kg·m2) | Iym | 40.2 (Test model) |
| Longitudinal location of center of gravity (CG) (m) | Lcg | 0.94/0.882/0.83 |
| Vertical location of CG (m) | Vcg | 0.23 |
| Trimaran-form state (TFS) |
| Side-hull length (m) | Ld | 0.72 |
| Side-hull breadth (m) | Bd | 0.104 |
| Side-hull depth (m) | Td | 0.155 |
| Side-hull draft (m) | Dd | 0.098 |
| Initial design location of the released side-hulls in longitudinal, horizontal and vertical direction (m) | at | 0.23 |
| bt | 0.548 |
| ct | 0.07 |
| Draft of TFS (m) | Dt | 0.168 |
| Displacement of trimaran (kg) | ∆t | 137.3 |
| Inertia tensor of trimaran (kg·m2) | Iyt | 49.43 |
| Longitudinal location of CG (m) | Lcg | 0.882/0.83 |
| Vertical location of CG (m) | Vcg | 0.23 |
Table 2.
Model test conditions in calm water.
Table 2.
Model test conditions in calm water.
| Condition | ∆m (kg) | Lcg (m) | Lcg/Lm | τ0 (°) |
|---|
| One | 137.3 | 0.94 | 0.41 | −0.4 |
| Two | 137.3 | 0.882 | 0.38 | 0.6 |
| Three | 137.3 | 0.83 | 0.35 | 1.6 |
| Four | 125.4 | 0.882 | 0.38 | 0.6 |
Table 3.
Parameters of the four grids.
Table 3.
Parameters of the four grids.
| Grid Parameters | Detailed Description | Grid 4 | Grid 3 | Grid 2 | Grid 1 |
|---|
| Mesh number | Entire calculation domain (k) | 238 | 524 | 788 | 1550 |
| Overset region grid size | Relative minimum size (%Lg) | 2.828 | 2 | 1.414 | 1 |
| Relative target size (%Lg) | 5.656 | 4 | 2.828 | 2 |
Volume control
region grid size | Relative grid size in the x, y,
z direction (%Lg) | 11.31 | 8 | 5.656 | 5 |
| 11.31 | 8 | 5.656 | 5 |
| 11.31 | 8 | 5.656 | 5 |
Grid size around
the free surface | Relative grid size in the x, y,
z direction (%Lg) | 28.28 | 20 | 14.14 | 10 |
| 28.28 | 20 | 14.14 | 10 |
| 2.828 | 2 | 1.414 | 1 |
Table 4.
Resistance comparisons of the test (EFD) and numerical (CFD) results for different grids.
Table 4.
Resistance comparisons of the test (EFD) and numerical (CFD) results for different grids.
| Grid | Resistance (N) | Deviation (%) |
|---|
| EFD | CFD |
|---|
| 4 | 233.436 | 202.616 | −13.203 |
| 3 | 233.436 | 214.535 | −8.097 |
| 2 | 233.436 | 224.45 | −3.849 |
| 1 | 233.436 | 224.754 | −3.719 |
Table 5.
Resistance comparisons of the test and numerical results at different y+ values.
Table 5.
Resistance comparisons of the test and numerical results at different y+ values.
| y+ | Resistance (N) | Deviation (%) |
|---|
| EFD | CFD |
|---|
| 50 | 233.436 | 203.321 | −12.901 |
| 100 | 233.436 | 209.901 | −10.082 |
| 150 | 233.436 | 212.742 | −8.865 |
| 200 | 233.436 | 221.456 | −5.132 |
| 250 | 233.436 | 224.45 | −3.849 |
| 300 | 233.436 | 223.521 | −4.247 |
Table 6.
The numerical results of resistance at different determination of time steps (∆ts).
Table 6.
The numerical results of resistance at different determination of time steps (∆ts).
| ∆ts | Resistance (N) | Deviation (%) |
|---|
| EFD | CFD |
|---|
| 0.01 | 233.436 | 214.902 | −7.94 |
| 0.008 | 233.436 | 221.478 | −5.123 |
| 0.006 | 233.436 | 224.45 | −3.849 |
| 0.004 | 233.436 | 225.509 | −3.396 |
| 0.002 | 233.436 | 229.033 | −1.886 |
Table 7.
The comparisons of total resistance (RT), sinkage (Zcg), and trim angle (τ).
Table 7.
The comparisons of total resistance (RT), sinkage (Zcg), and trim angle (τ).
| Fr | RT(kg·F) | Zcg(mm) | τ(deg) |
| EFD | CFD (+Sav) | Deviation (%) | EFD | CFD | Deviation (%) | EFD | CFD | Deviation (%) |
| 0.42 | 7.94 | 7.85 | −1.12 | - | - | - | - | - | - |
| 0.63 | 20.44 | 21.30 | 4.21 | −11 | −7.01 | −36.27 | 5.66 | 5.93 | 4.70 |
| 0.84 | 23.41 | 23.46 | 0.20 | 18.3 | 20.33 | 11.09 | 6.87 | 6.79 | −1.11 |
| 1.05 | 24.98 | 24.16 (24.24) | −3.27 (−2.95) | 55.1 | 60.65 | 10.06 | 8.07 | 7.54 | −6.60 |
| 1.26 | 23.82 | 22.95 (23.08) | −3.67 (−3.09) | 81 | 84.07 | 3.79 | 7.23 | 6.91 | −4.45 |
| 1.47 | 22.54 | 21.68 (22.0) | −3.81 (−2.42) | 94.8 | 99.59 | 5.06 | 6.34 | 5.97 | −5.82 |
| 1.68 | 22.45 | 20.86 (21.54) | −7.09 (−4.04) | 103.6 | 109.26 | 5.46 | 5.27 | 5.12 | −2.94 |
| 1.89 | 22.92 | 20.45 (21.67) | −10.76 (−5.44) | 109.5 | 114.17 | 4.27 | 4.66 | 4.43 | −4.90 |
| 2.10 | 23.8 | 20.75 (22.70) | −12.81 (−4.60) | 116.7 | 119 | 1.97 | 4.05 | 3.89 | −3.95 |
| 2.31 | 25.39 | 21.57 (24.47) | −15.06 (−3.62) | 117.3 | 123.15 | 4.99 | 3.59 | 3.44 | −4.18 |
| 2.52 | 27.26 | 22.31 (26.46) | −18.15 (−2.95) | 118.8 | 128.12 | 7.85 | 3.23 | 3.03 | −6.19 |
| (a) Fr = 0.42–2.52; Lcg/Lm = 0.38; when Fr = 2.73 (v = 13 m/s), the porpoising occurs. |
| Fr | RT(kg·F) | Zcg(mm) | τ(deg) |
| EFD | CFD (+Sav) | Deviation (%) | EFD | CFD | Deviation (%) | EFD | CFD | Deviation (%) |
| 0.63 | 22.48 | 23.43 | 4.20 | −14.2 | −10.82 | −23.8 | 6.66 | 7.46 | 12.01 |
| 0.84 | 25.84 | 25.63 | −0.84 | 18.2 | 23.59 | 18.72 | 8.13 | 8.45 | 3.94 |
| 1.05 | 26.55 | 25.78 (25.83) | −2.91 (−2.71) | 56.8 | 62.72 | 10.42 | 8.65 | 8.67 | 0.23 |
| 1.26 | 24.51 | 23.64 (23.75) | −3.53 (−3.1) | 83.4 | 90.28 | 8.25 | 7.39 | 7.55 | 2.17 |
| 1.47 | 23.37 | 21.82 (22.09) | −6.65 (−5.5) | 97.6 | 100.65 | 3.13 | 6.25 | 6.35 | 1.54 |
| 1.68 | 22.66 | 20.59 (21.20) | −9.15 (−6.44) | 110.1 | 107.61 | −2.26 | 5.51 | 5.38 | −2.36 |
| 1.89 | 22.88 | 20.25 (21.39) | −11.51 (−6.53) | 113.8 | 111.38 | −2.13 | 4.76 | 4.62 | −2.88 |
| 2.10 | 23.79 | 20.62 (22.53) | −13.32 (−5.3) | 118.9 | 120.43 | 1.29 | 4.15 | 3.95 | −4.87 |
| 2.31 | 25.58 | 21.51 (24.14) | −15.91 (−5.65) | 122.2 | 128.44 | 5.1 | 3.78 | 3.69 | −2.32 |
| (b) Fr = 0.63–2.31; Lcg/Lm = 0.35; when Fr = 2.52 (v = 12 m/s), the porpoising occurs. |
Table 8.
Six longitudinal locations of side-hulls in the TFS.
Table 8.
Six longitudinal locations of side-hulls in the TFS.
| No. | ∆t (kg) | ∆d/∆t | a (m) | b/Lm | a/Lm | Lcg (m) | Iyt (kg·m2) |
|---|
| 1 | 137.3 | 0.047 | −0.23 | 0.8 | −0.1 | 0.864 | 53.079 |
| 2 | 137.3 | 0.047 | 0 | 0.8 | 0 | 0.873 | 50.979 |
| 3 | 137.3 | 0.047 | 0.23 | 0.8 | 0.1 | 0.882 | 49.430 |
| 4 | 137.3 | 0.047 | 0.46 | 0.8 | 0.2 | 0.891 | 48.612 |
| 5 | 137.3 | 0.047 | 0.69 | 0.8 | 0.3 | 0.901 | 48.362 |
| 6 | 137.3 | 0.047 | 0.92 | 0.8 | 0.4 | 0.910 | 48.735 |
Table 9.
Six vertical locations of the side-hulls in the TFS.
Table 9.
Six vertical locations of the side-hulls in the TFS.
| No. Number | ∆t (kg) | ∆d/∆t | b/Lm | c (m) | Dd/Tm | Dm (m) | Sm (m2) | Sd (m2) | Vcg (m) | Iyt (kg·m2) |
|---|
| 1 | 137.3 | 0.047 | 0.8 | 0.07 | 0.274 | 0.168 | 1.251 | 0.051 | 0.2301 | 49.430 |
| 2 | 137.3 | 0.067 | 0.8 | 0.05 | 0.330 | 0.166 | 1.248 | 0.068 | 0.2292 | 49.441 |
| 3 | 137.3 | 0.086 | 0.8 | 0.03 | 0.386 | 0.164 | 1.246 | 0.068 | 0.2285 | 49.455 |
| 4 | 137.3 | 0.104 | 0.8 | 0.01 | 0.442 | 0.162 | 1.245 | 0.068 | 0.2277 | 49.473 |
| 5 | 137.3 | 0.113 | 0.8 | 0 | 0.470 | 0.161 | 1.244 | 0.068 | 0.2273 | 49.484 |
| 6 | 137.3 | 0.122 | 0.8 | −0.01 | 0.498 | 0.160 | 1.243 | 0.068 | 0.2269 | 49.495 |
Table 10.
Influence of side-hull longitudinal and vertical locations on the inhibition of porpoising instability and total resistance.
Table 11.
The main geometric parameters of the real-scale MFS and cases 1–4 under condition two.
Table 11.
The main geometric parameters of the real-scale MFS and cases 1–4 under condition two.
| Cases | ∆t (kg) | a/Lm | b/Bm | Dd/Tm | Lcg (m) | Vcg (m) | Iyt (kg·m2) |
|---|
| MFS | 2200 | 0.1 | 0.8 | 0 | 2.205 | 0.521 | 4827 |
| Case 1 | 2200 | 0 | 0.8 | 0.330 | 2.183 | 0.573 | 4978 |
| Case 2 | 2200 | 0.1 | 0.8 | 0.274 | 2.205 | 0.575 | 4827 |
| Case 3 | 2200 | 0.2 | 0.8 | 0.330 | 2.228 | 0.573 | 4747 |
| Case 4 | 2200 | 0.3 | 0.8 | 0.274 | 2.253 | 0.575 | 4723 |
Table 12.
The comparisons of the dimensionless oscillation amplitude of trim angle (Cτ), dimensionless oscillation amplitudes of sinkage (CZ), total average resistance (Rav), maximum resistance (Ram), and percentage of resistance increment (PRI) under condition two.
Table 12.
The comparisons of the dimensionless oscillation amplitude of trim angle (Cτ), dimensionless oscillation amplitudes of sinkage (CZ), total average resistance (Rav), maximum resistance (Ram), and percentage of resistance increment (PRI) under condition two.
| Cases | Cτ | CZ | Rav (N) | PRI (%) | Ram (N) |
|---|
| MFS | 0.790 | 0.273 | 4288 | 0 | 4529 |
| Case 1 | 0.022 | 0.008 | 5078 | 18.43 | 5169 |
| Case 2 | 0.025 | 0.011 | 4369 | 1.89 | 4460 |
| Case 3 | 0.024 | 0.009 | 4450 | 3.78 | 4515 |
| Case 4 | 0.045 | 0.015 | 4203 | −1.97 | 4310 |







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



 Weak location
Weak location  Optional location
Optional location  Unfit location
Unfit location