Verification and Validation of CFD Based Form Factors as a Combined CFD/EFD Method


Abstract
:1. Introduction
- Detailed explanation of the flow solver, numerical methods, boundary conditions, grid generation, and computational conditions are presented in Section 3 and the derivation of the BPG for the SHIPFLOW code by systematically varying the CFD set-up such as grid dependence studies in Section 5.1, y in Section 5.1.1, additional grid refinements in Section 5.1.2, domain size in Section 5.1.3, model scale speed in Section 5.1.4, and turbulence models in Section 5.1.5.
- Verification and validation of the CFD based form factors of six test cases in model scale is presented in Section 5.1.6.
- Comparison of up to 78 sea trials to the predictions made by combined CFD/EFD methods is presented in Section 6.
- Can the proposed quality assurance procedure be used to to ensure the predicted form factors are suitable for full scale predictions?
- Can CFD based form factors introduce immediate improvements to the existing ITTC-78 method?
- Can there be further improvements to the full scale predictions by further modification of ITTC-78 method such as the change of the friction line in combination with CFD based form factors?
2. Extrapolation of Model Tests to Full Scale
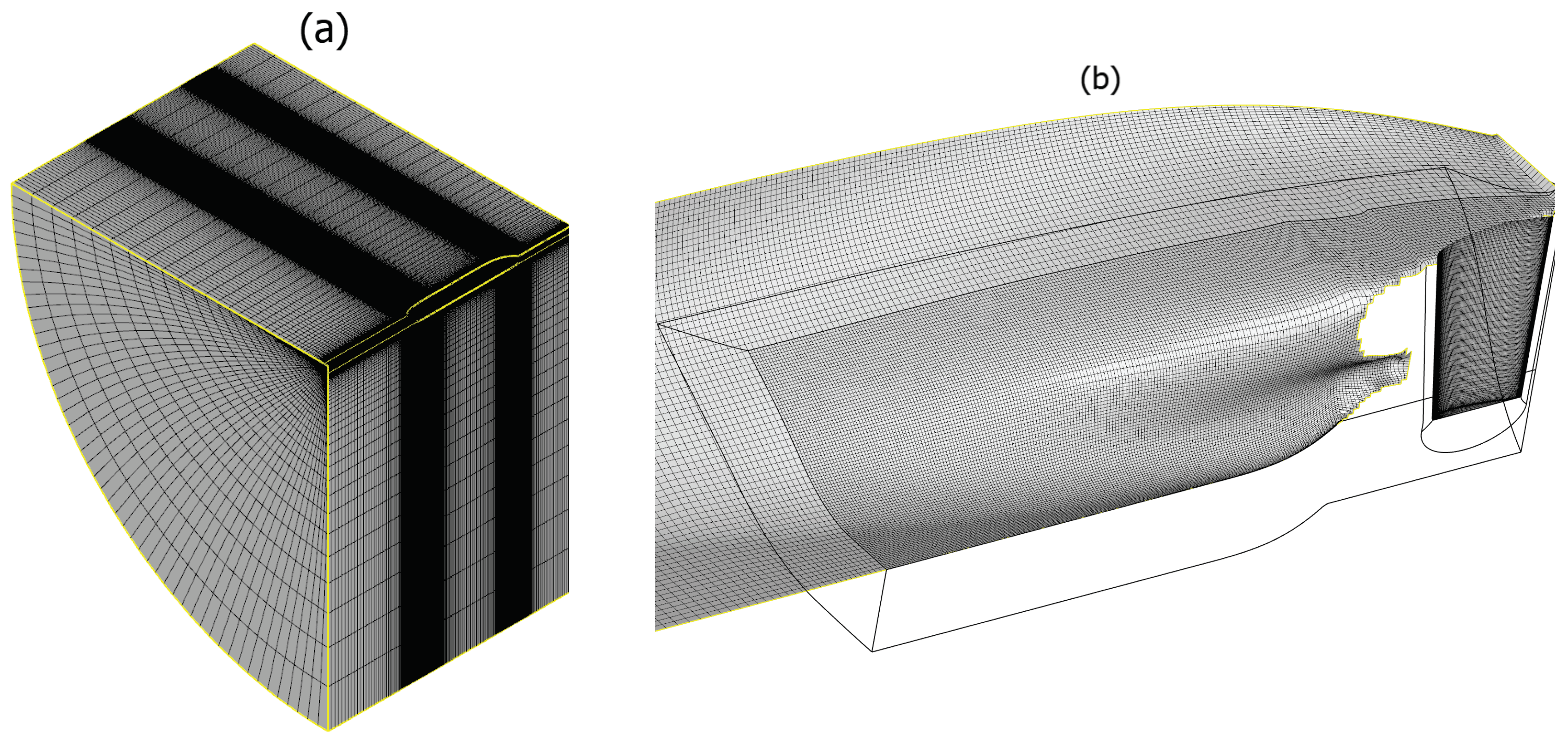
3. Flow Solver, Grid Generation, Computational Domain, and Boundary Conditions
4. Test Cases and Computational Conditions
5. Best Practice Guidelines and the Quality Assurance of the CFD Based Form Factor Methodology
5.1. Grid Dependence Study
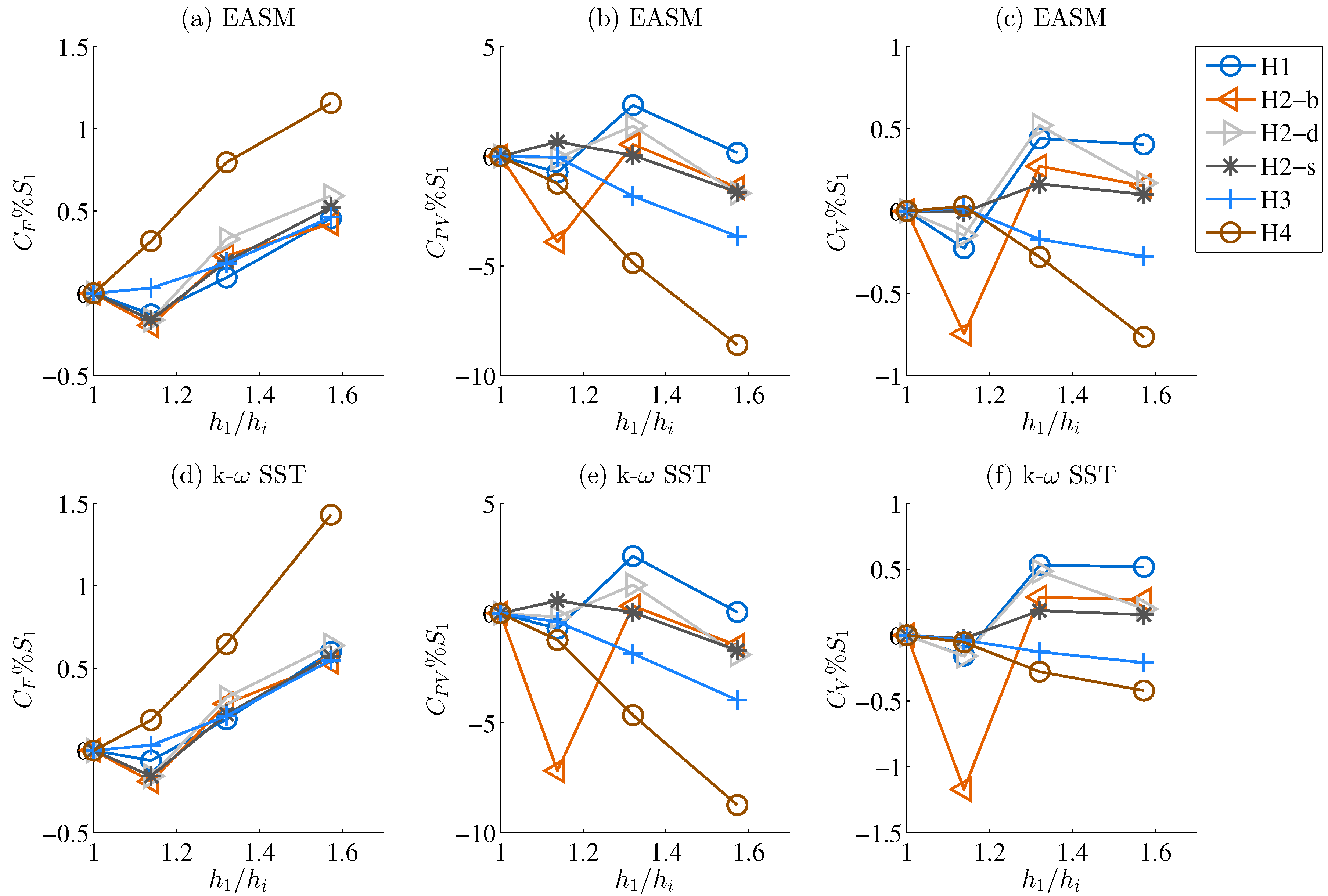
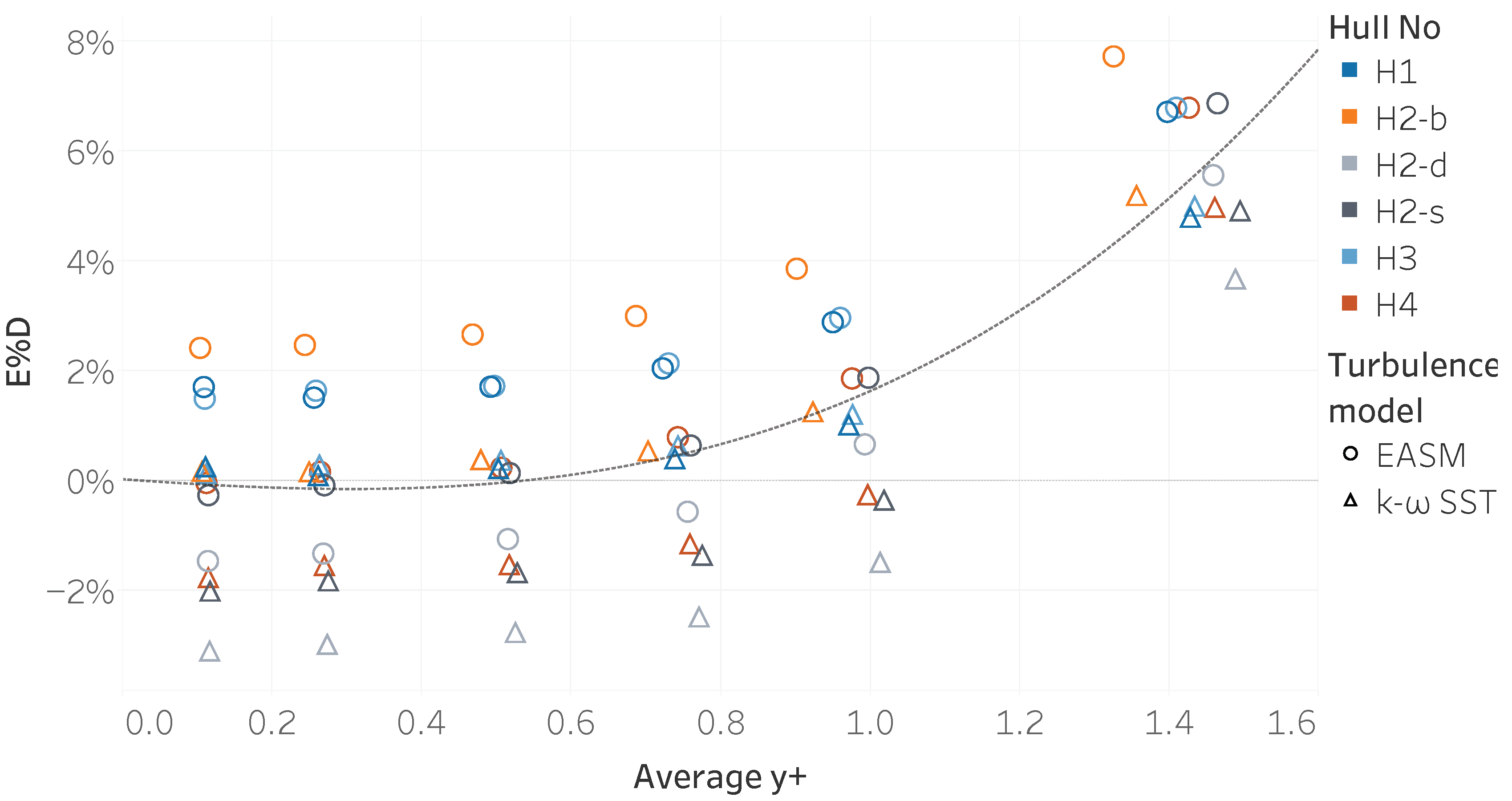
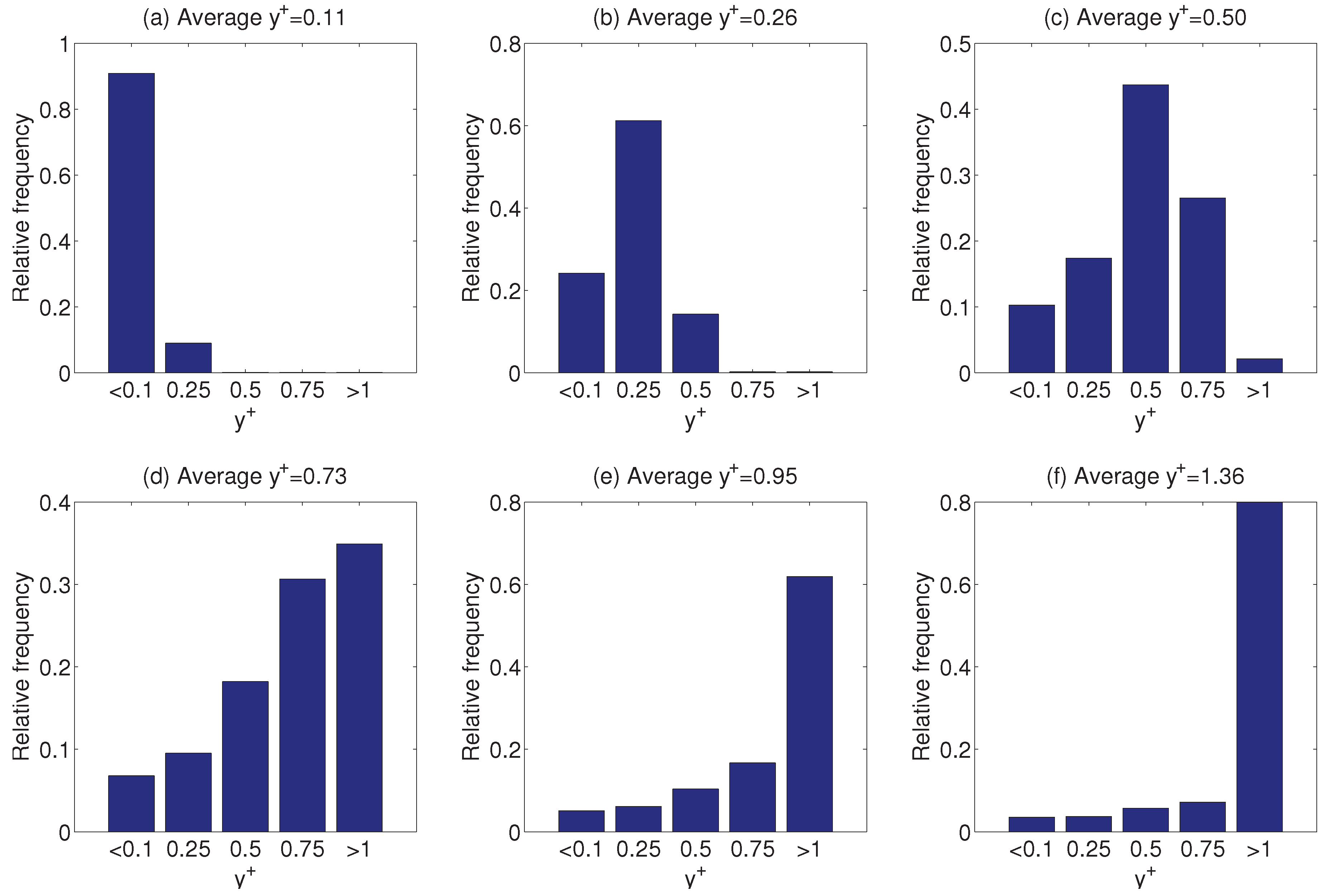
5.1.1. Variation of the First Cell Size Normal to the Wall, i.e., y Variation
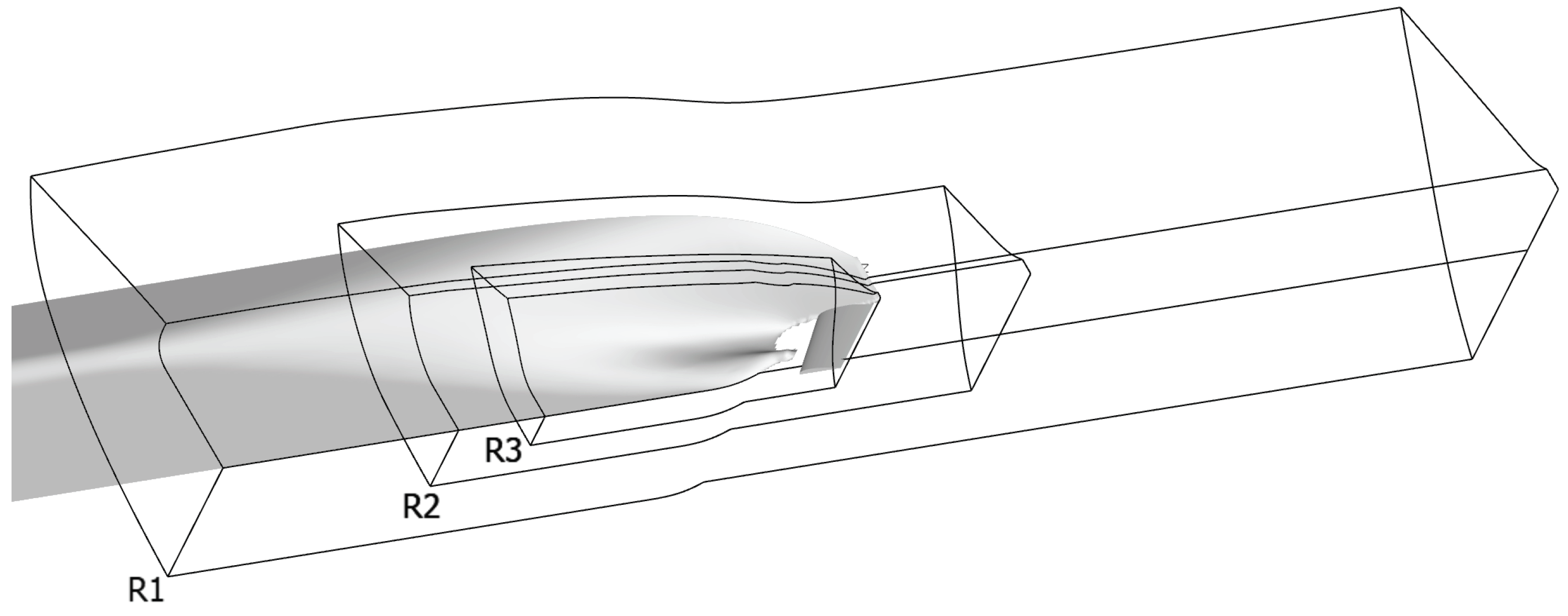
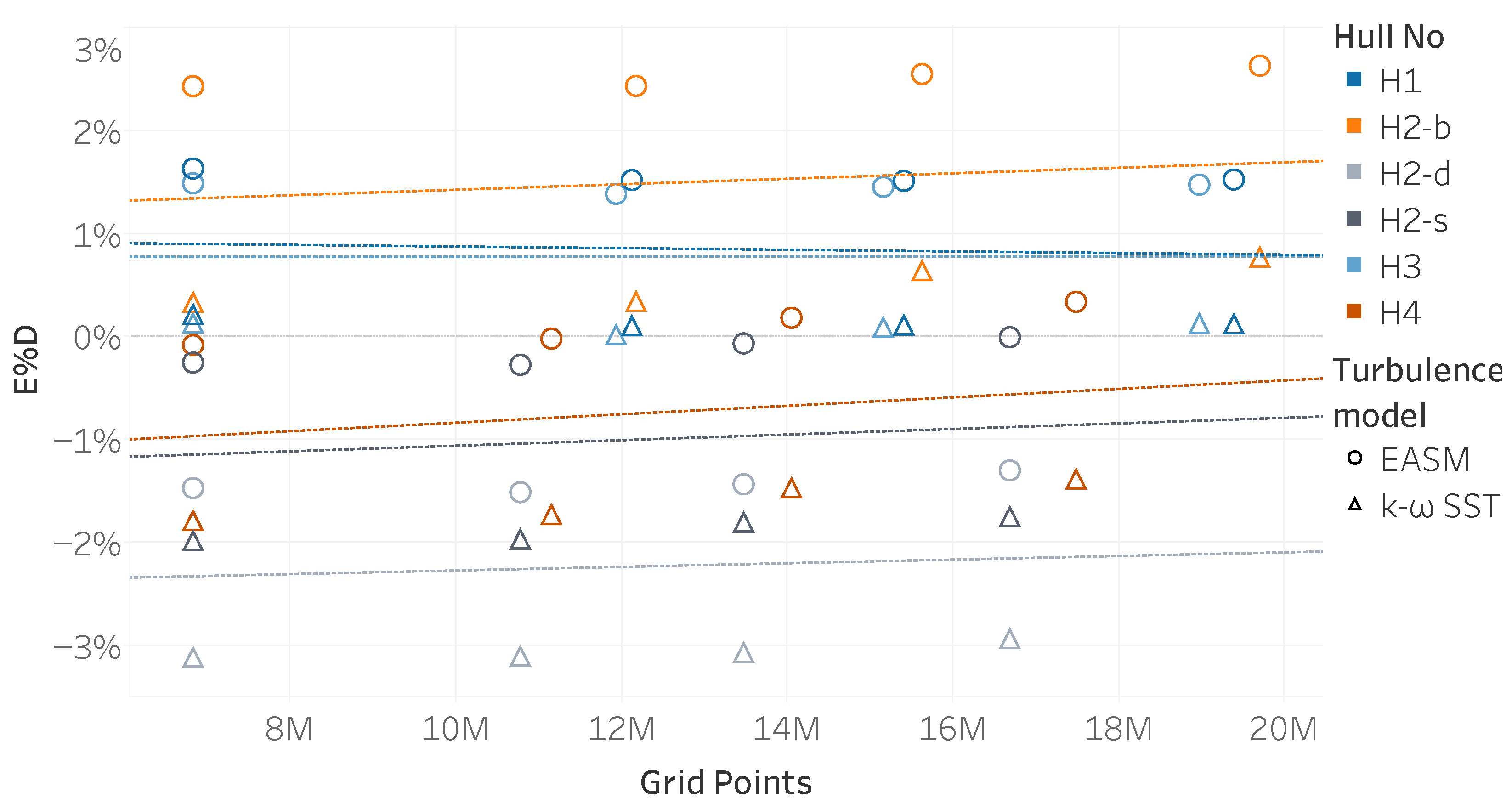
5.1.2. Variation of Refinement Region
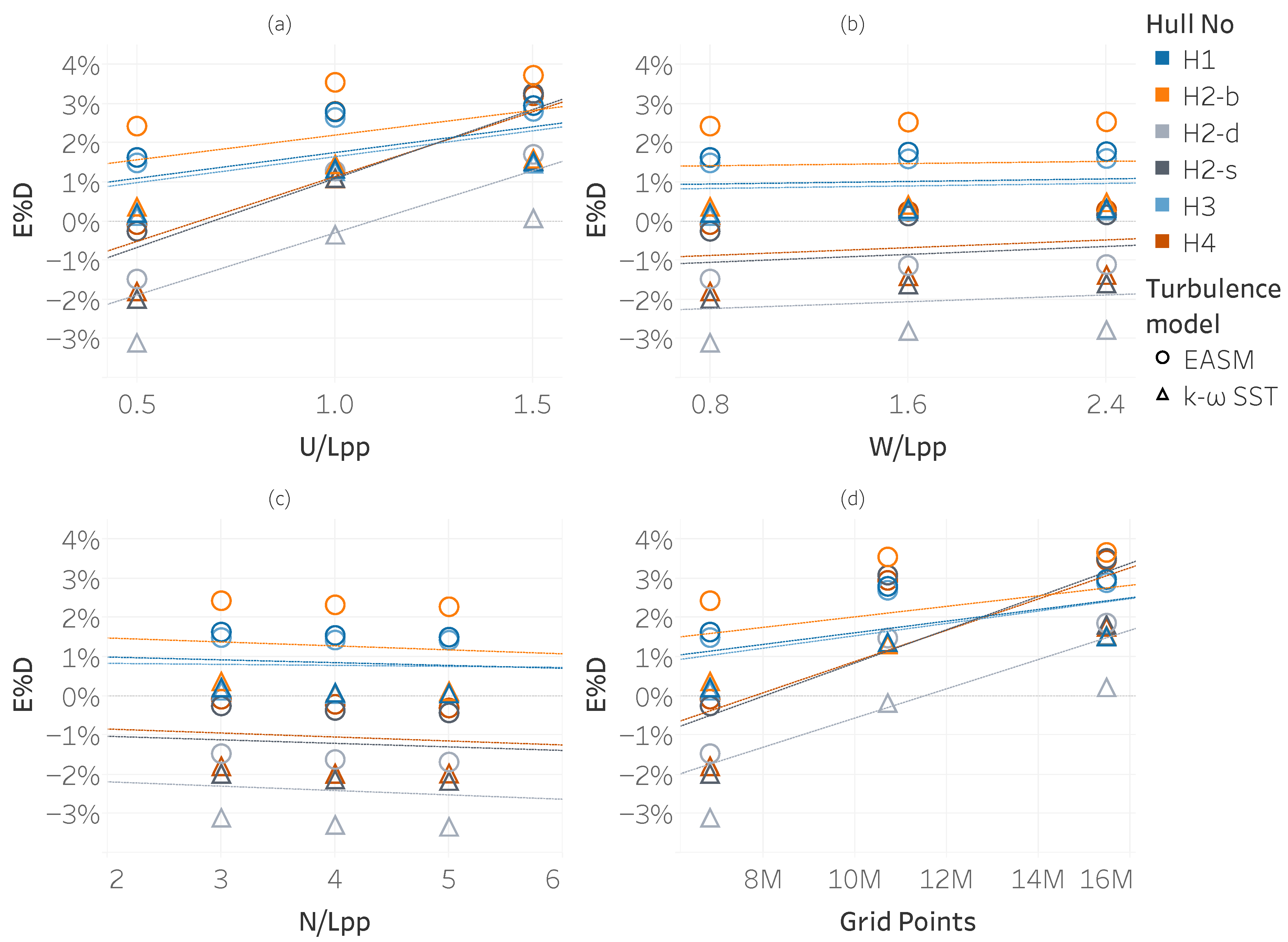
5.1.3. Domain Size Variation
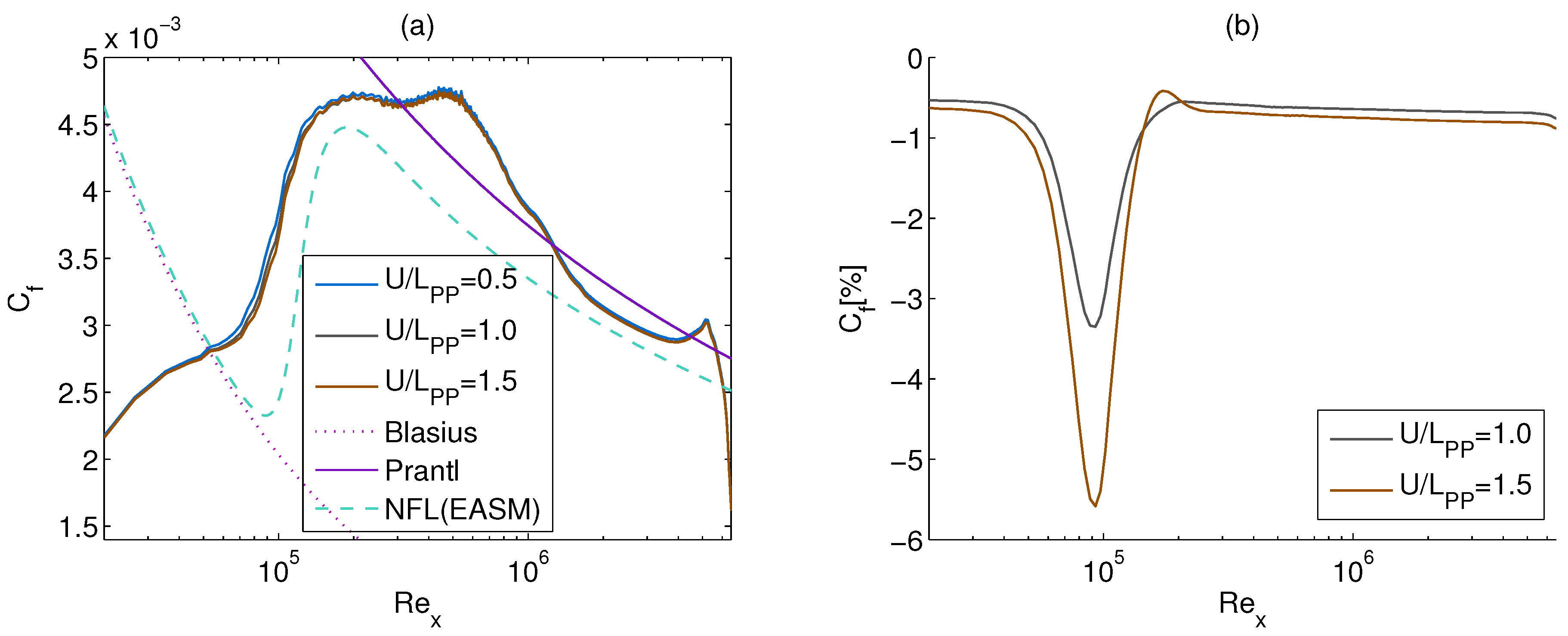
5.1.4. Variation of the Model Scale Speed
5.1.5. Turbulence Model
5.1.6. Validation in Model Scale
6. Demonstration of Quality by Comparison of Full Scale Predictions
6.1. Comparison of the Standard ITTC-78 Method and CFD Based Form Factors Using the ITTC-57 Line
6.2. Comparison of the CFD Based Form Factors Using the ITTC-57 Line and Numerical Friction Lines
6.3. Analysis of the Extrapolation Methods and Speed Trials
6.4. Discussion
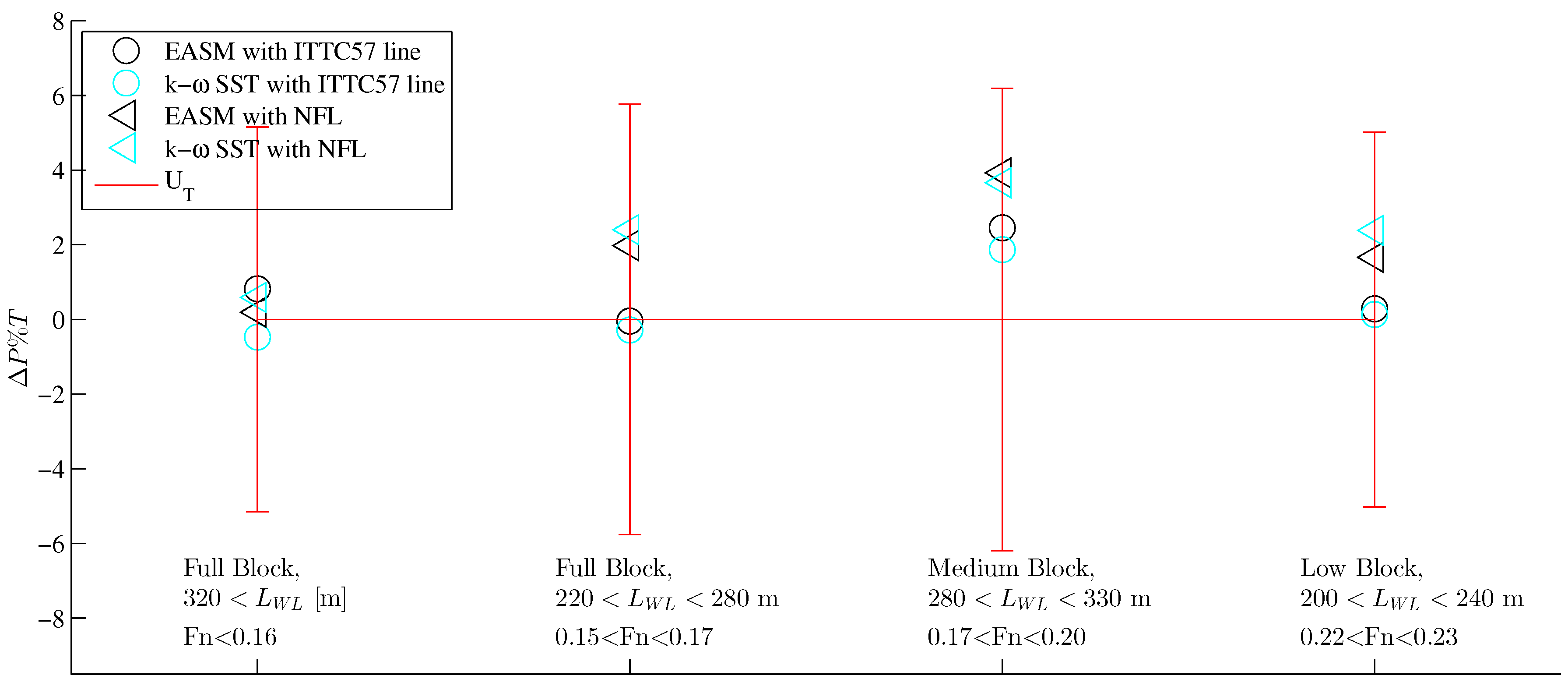
- full block, large vessels (L m) operating at ;
- full block, medium size vessels (220 m < L m) operating at ;
- medium block, large vessels (280 m < L m) operating at ;
- low block, medium size vessels (200 m < L m) operating at .
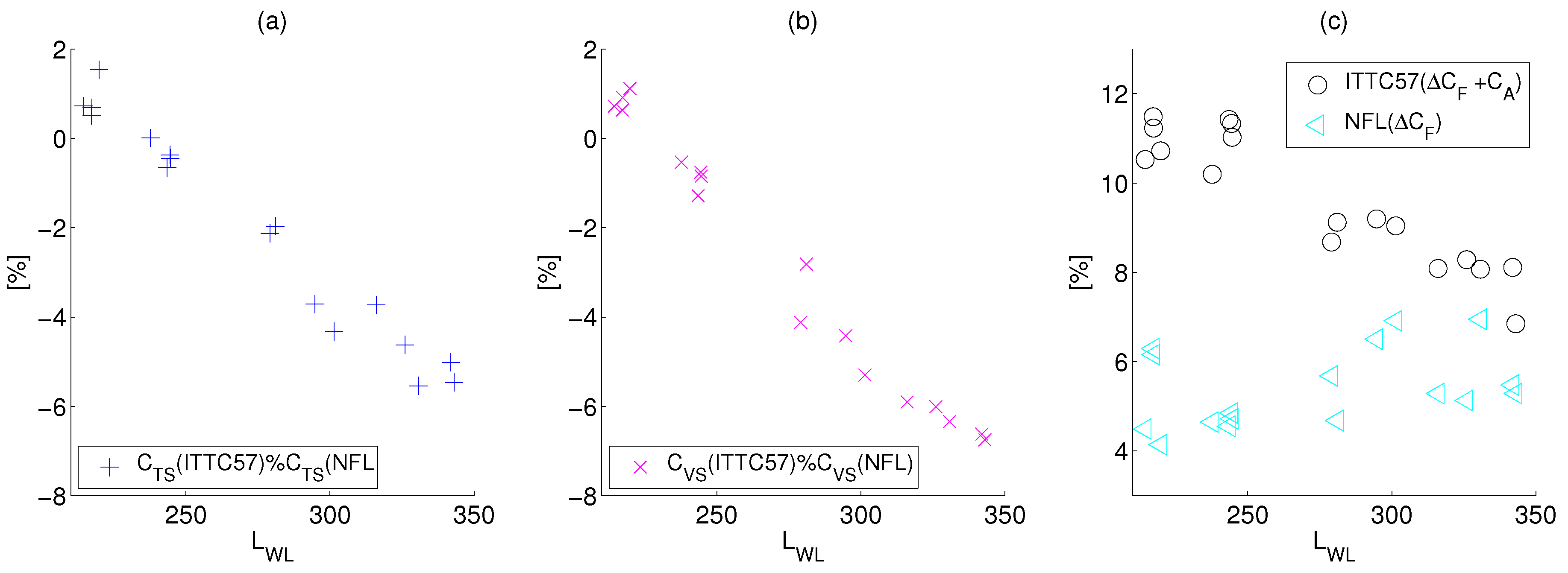
- between the form factor predictions as the C values are significantly different in model scale between the friction lines [30].
- in the model scale viscous resistance, C, except at the for which the simulation is performed and the form factors are obtained from. Note that C at the model scale are calculated as C (1 + k)C and the slope of the ITTC-57 line and the numerical friction lines are different.
- in the residual resistance (see Equation (2)) due to different C values.
- in the full scale viscous resistance of the smooth hull since it is calculated as C (1 + k)C, where the form factors are substantially different for different friction lines, but the C values are highly similar for the ITTC-57 line and the numerical friction lines in full scale as demonstrated in Korkmaz et al. [30].
7. Conclusions
- Mainly as a result of grid generation strategy of SHIPFLOW, monotonic convergence of the computed resistance coefficients may not always be possible, and, therefore, sometimes leading to excessive numerical uncertainties. However, the variation of between all the grids is limited and less than 1% may be indicating that non-monotonic behavior is overly penalized by the numerical uncertainty determination method in this study.
- The differences between the two finest grids are less than 0.2% except one case where the viscous pressure resistance coefficient varies significantly more compared to other test cases due to an abrupt change of grid cell formation near the stagnation point at the bulb. This indicates that, even though the grid generator of the CFD code used in this study may occasionally introduce errors, the fine grids are of good quality for CFD based form factor determination.
- In order to make sure that nearly all no-slip cells are y, the target for the average y should be maximum 0.5 for the SHIPFLOW code. Due to the curvature and the boundary layer growth of conventional hulls, y is likely to vary significantly when fixed first cell height is applied for all CFD codes. Therefore, similar exercises are recommended for other codes when a wall resolved approach is used.
- Additional refinements added to the stern region of all the test cases had no significant impact on the predicted form factor. Therefore, additional refinements are redundant when the initial grid is fine enough.
- The variation of the domain size had extensive consequences on the computed resistance coefficients for SHIPFLOW. However, other CFD codes are expected to experience similar issues as the main reason was identified as the change in the turbulence quantities when the distance between the inlet boundary and the fore-perpendicular of the hull is increased.
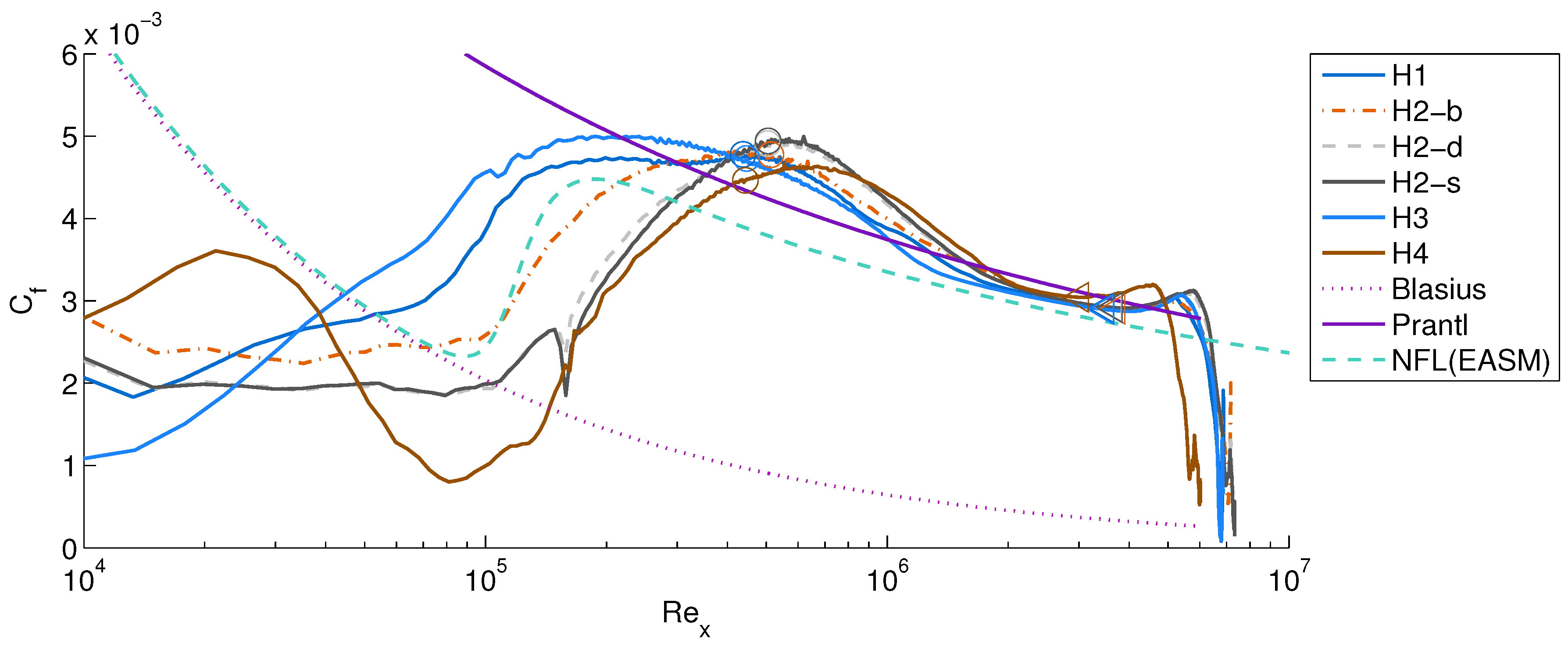
- The investigations on the local skin friction coefficient, , indicated that the flow is not all fully turbulent. The transition of flow in CFD occurred not later than the location where the turbulence stimulators are fitted in the model tests, making sure that the modeling errors due to different flow characteristics between CFD and EFD are negligible. Since the numerical methods, types of boundary conditions, and initial turbulence quantities (turbulent dissipation rate, turbulence kinetic energy) vary for each code, it is recommended that similar investigations should be performed for each code.
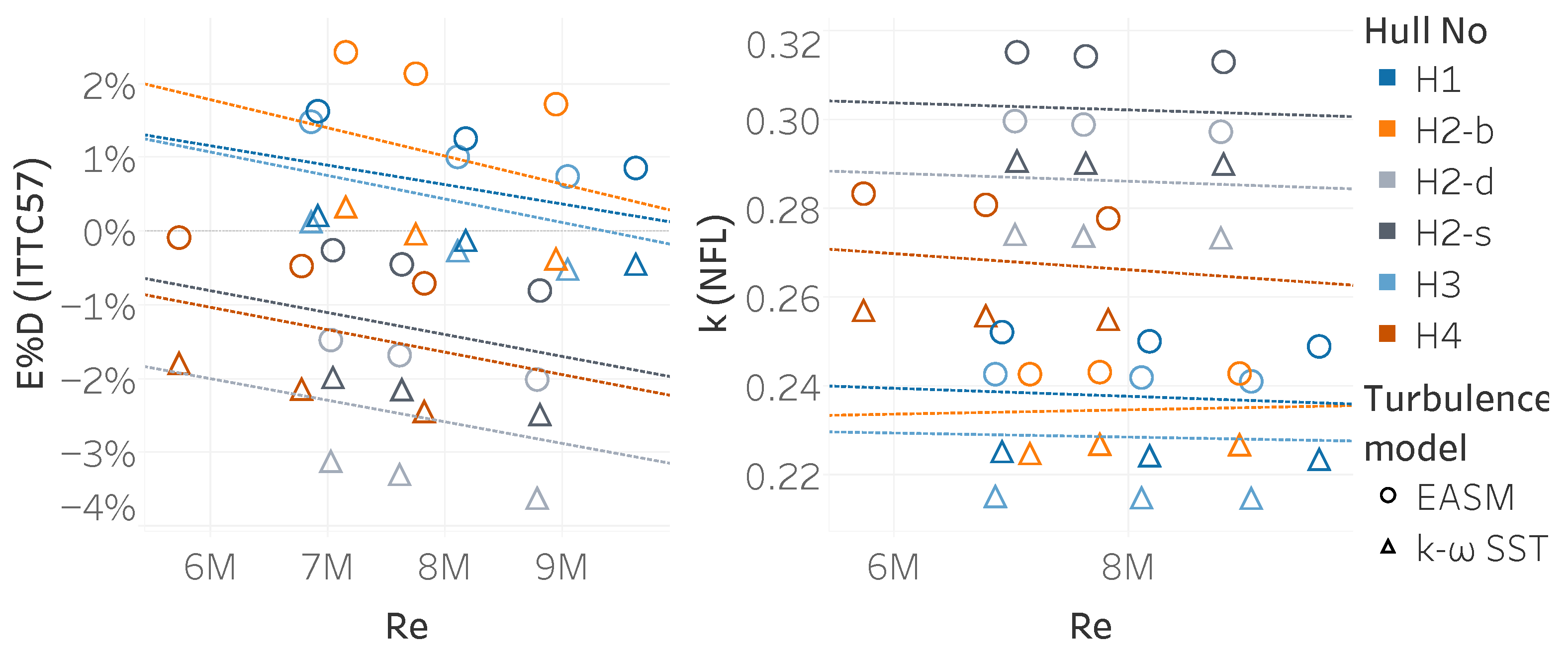
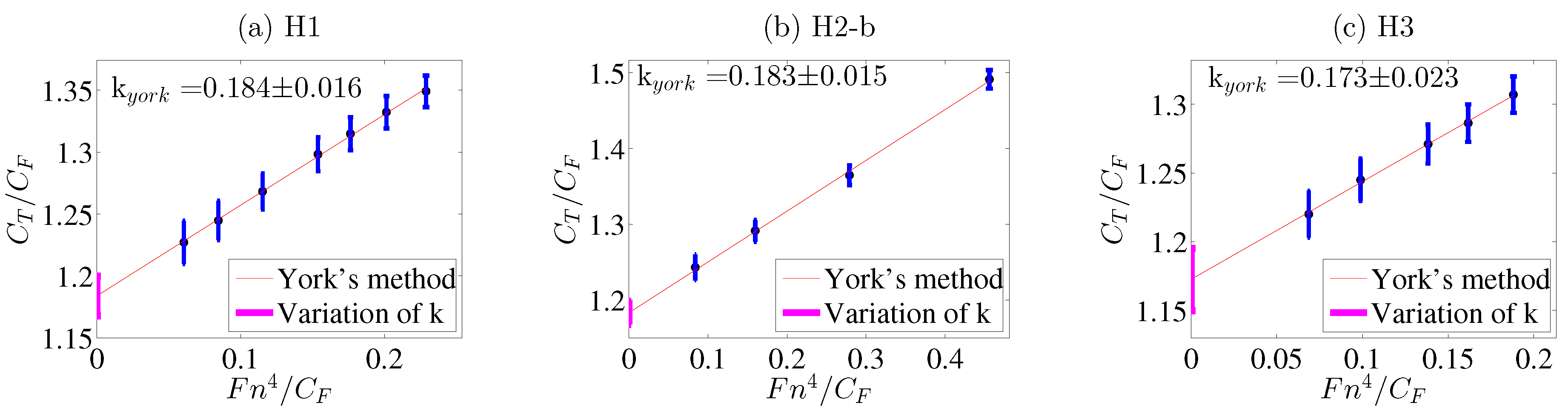
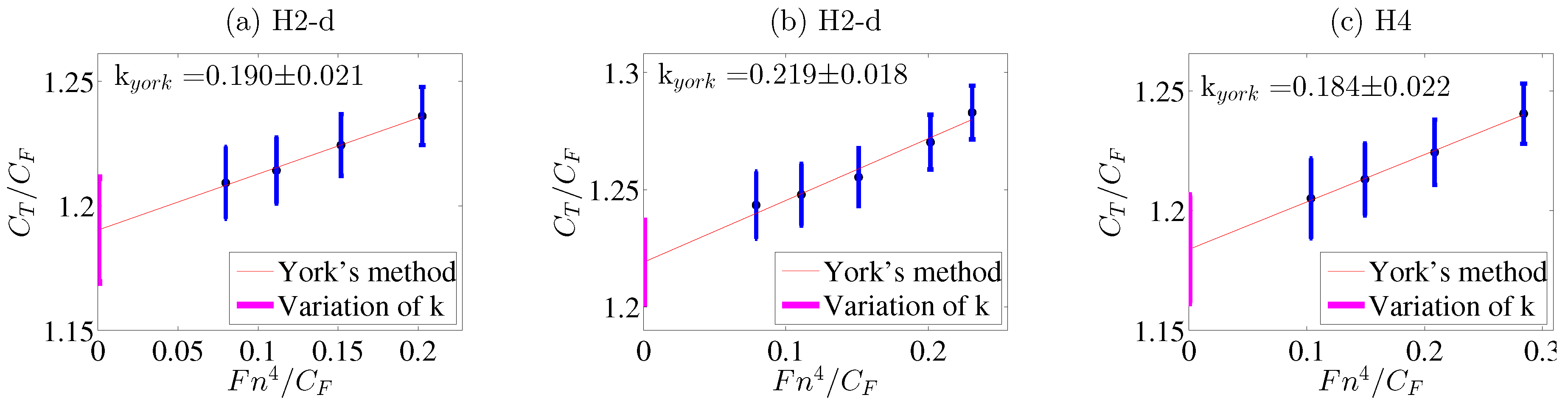
- The speed dependency of the form factors with the ITTC-57 line can be clearly observed for all test cases. Similar trends are expected by all CFD codes as the main reason for the dependency is the ITTC-57 line rather than the numerical methods. Considering that the experimental form factor determination is not immune to the scale effects (geosim models having different form factors with the ITTC-57 line), the model tow speed for CFD computations should be chosen with respect to the typical model sizes of the validation data.
- The application of numerical friction lines of the same code and turbulence model to the CFD based form factor determination, the speed dependency is nearly eliminated in all cases but one that is exhibiting mild flow separation. As the is increasing, the separation region is reduced; hence, the form factor changes as expected. According to the form factor approach of Hughes [6], there shall be no flow separation to ensure its validity. Therefore, for the cases where flow separation is observed, higher numbers should be used for the simulations regardless of the friction line used.
- The turbulence modeling is the largest source of modeling error for the form factor determination. The form factor predictions of all test cases from the SST model are approximately 10% higher than the EASM with the same grid.
- All variations to the CFD setting were performed for both turbulence models ( SST and EASM). The conclusions regarding to the other CFD settings are valid for both turbulent models.
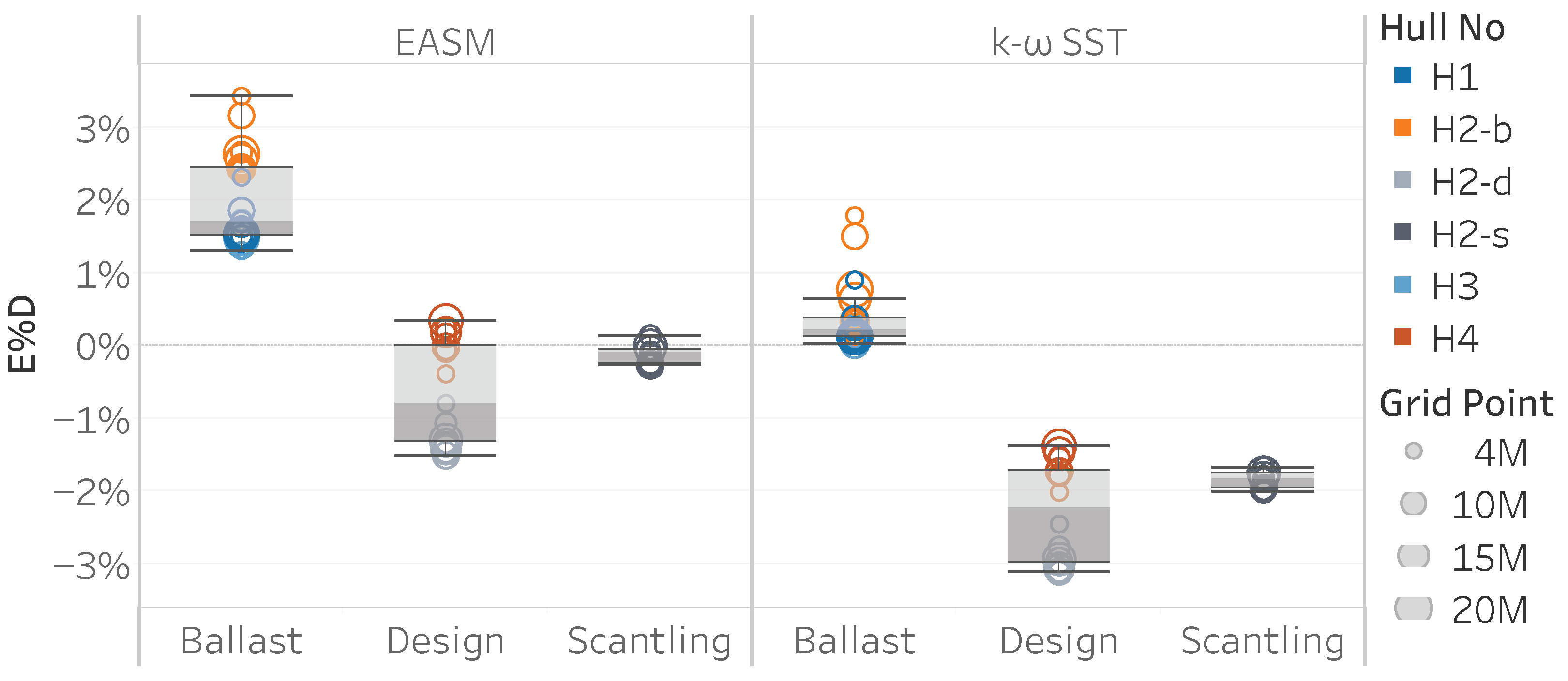
- The validation in model scale indicated that the comparison error is below the noise level for all test cases with the SST turbulence model. Except for one test case with EASM, validation is achieved at the U level for simulations using the EASM turbulence model. However, these findings are rather inconclusive due to very large numerical uncertainties in two test cases.
- The comparison between experimental uncertainty and the comparison error of CFD based form factors showed that the form factor predictions made with the SST model are within the experimental uncertainty for the same number of test cases as with the EASM turbulence model, but the SST model is better at predicting the ballast loading condition while EASM is better for the design and scantling loading conditions.
- The sample size of the sea trials is large enough to rank the extrapolation methods as varying the population of speed trials led to the same conclusions.
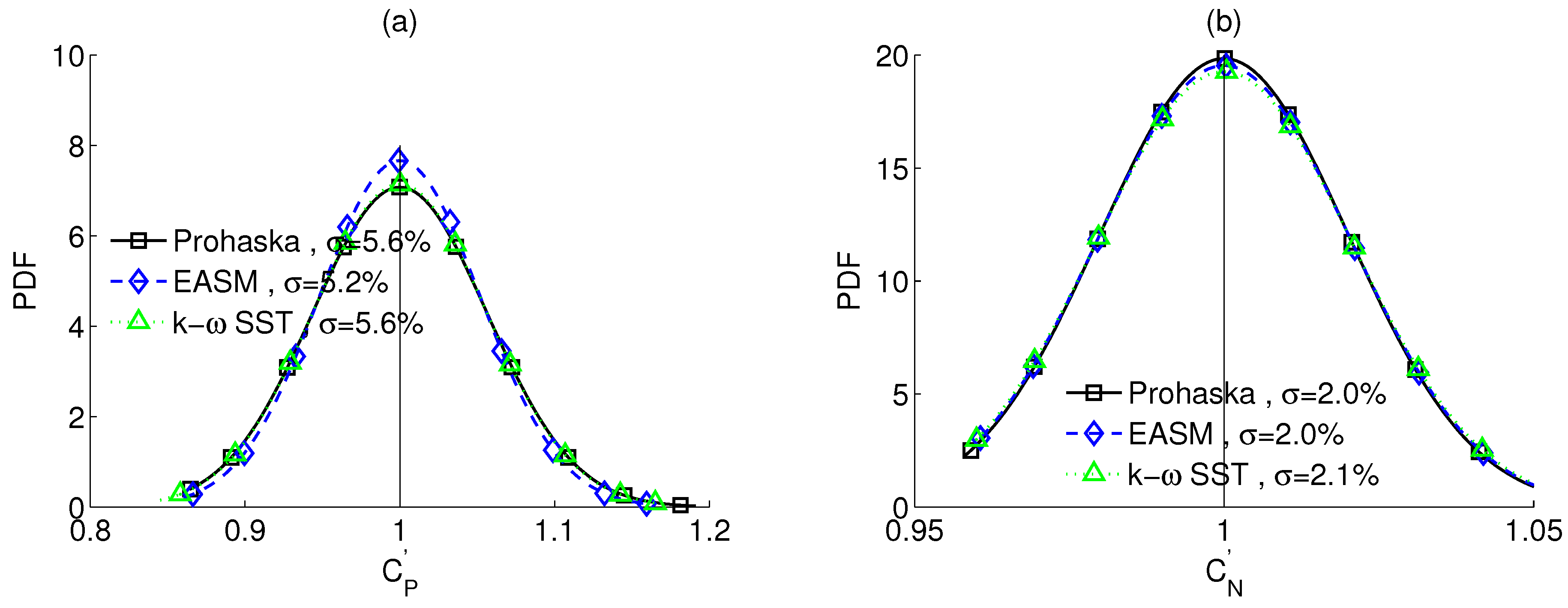
- The scatter of the correlation factors for the power prediction, C, is higher with the standard ITTC-78 method, where the form factors are obtained from the Prohaska method, than the extrapolation methods where the form factor is obtained from CFD with the EASM turbulence model and with the SST in combination with the NFL. The opposite trend is observed for the shaft rate. However, the prediction accuracy of the correlation factors for the propeller turning rate is significantly higher than C and the increase in the scatter of C is smaller than the gains in power predictions when CFD based form factors are used.
- Compared to the standard ITTC-78 method, the standard deviation of the normalized C is lower when the CFD based form factors are used with the EASM turbulence model.
- The CFD based form factors from the SST model led to negative or too small C values in some test cases as a result of the over-predicted form factors. Additionally, the scatter of C are higher when the SST model is used in comparison with the EASM turbulence model.
- The usage of CFD based form factors with the EASM turbulence model in combination with the ITTC-57 line improves the predictions for the medium block, medium speed hulls noticeably, while the prediction accuracy remained the same for the other types of ships in comparison with the prediction from the standard ITTC-78 method.
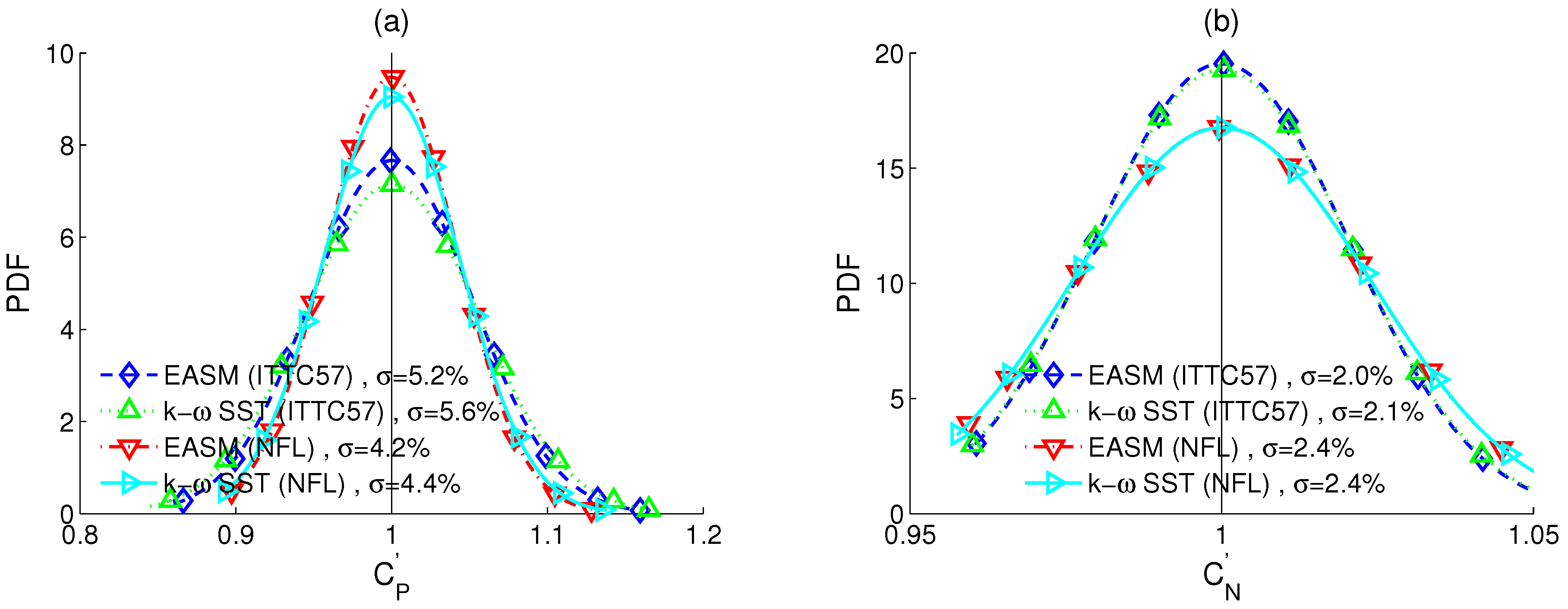
- The most promising method out of the five investigated extrapolation methods is the CFD based form factors using the EASM turbulence model and the NFL. It reduces the standard deviation of C and decreases the number of predictions with larger errors than 10%, while the number of predictions with errors less than 5% are increased significantly.
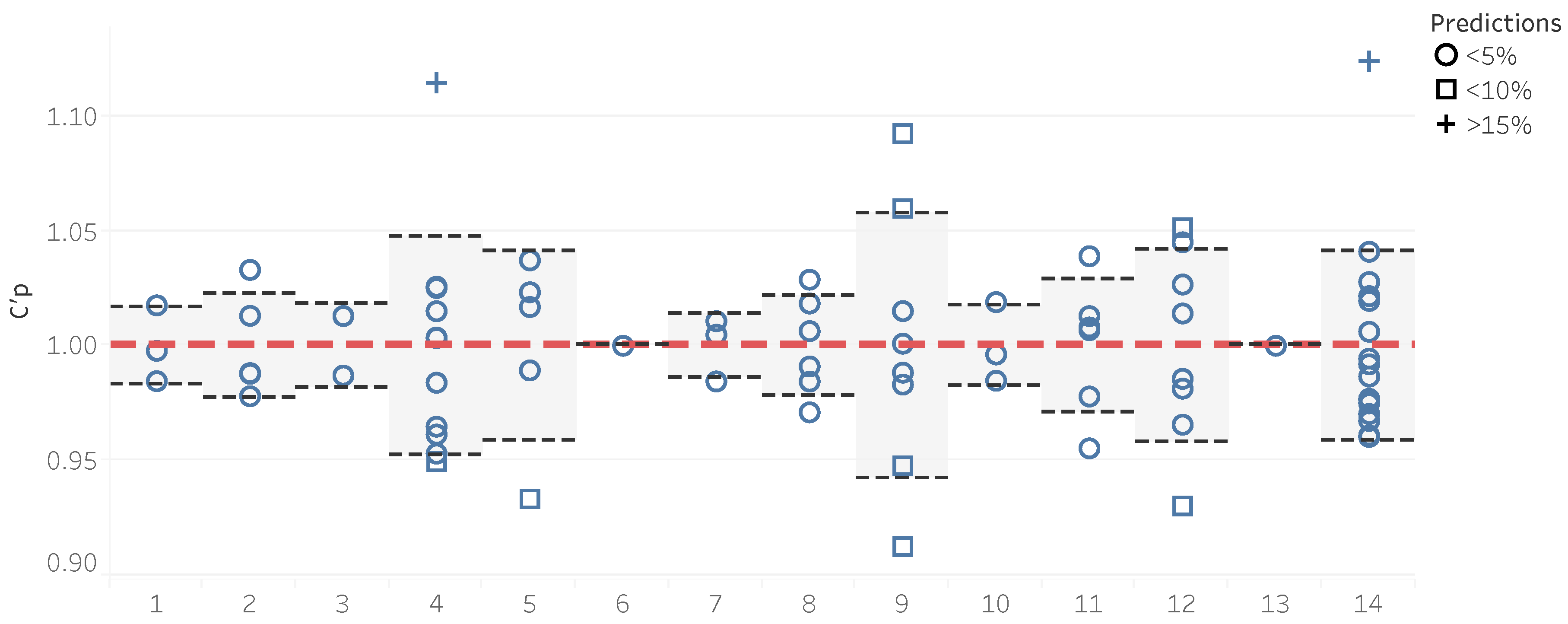
- The main contributor of the standard deviation of C originates from the scatter of the speed trials among the sister ships. The standard deviation of C is close to the minimum value that could be obtained from the speed trial data set when the CFD based form factors are used with the EASM turbulence model and the NFL.
- The group of vessels that improved most in prediction accuracy are the medium block and medium speed () ships which are typical difficult cases for the form factor determination using the Prohaska method.
Author Contributions
Funding
Conflicts of Interest
References
- Larsson, L.; Raven, H.C. Ship Resistance and Flow; The Society of Naval Architects and Marine Engineers: Jersey City, NJ, USA, 2010. [Google Scholar]
- IMO. Annex 19: Resolution MEPC.203(62); International Maritime Organization: London, UK, 2011. [Google Scholar]
- ITTC. D. Skin Friction; International Conference of Ship Tank Superintendents: London, UK, 1948. [Google Scholar]
- ITTC. Subjects 2 and 4 Skin Friction and Turbulence Stimulation; International Towing Tank Conference: Madrid, Spain, 1957. [Google Scholar]
- Prohaska, C.W. A Simple Method for the Evaluation of the Form Factor and Low Speed Wave Resistance. In Proceedings of the 11th ITTC, Tokyo, Japan, 11–20 October 1966. [Google Scholar]
- Hughes, G. Friction and Form Resistance in Turbulent Flow, and a Proposed Formulation for Use in Model and Ship Correlation; National Physical Laboratory: London, UK, 1954; Volume 96. [Google Scholar]
- Bowden, B.S.; Davison, N.J. Resistance Increments Due to Hull Roughness Associated with form Factor Extrapolation Methods; National Physical Laboratory: London, UK, 1974. [Google Scholar]
- ITTC. Report of Performance Committee; International Towing Tank Conference: Ottawa, ON, Canada, September 1975. [Google Scholar]
- ITTC. Report of Performance Committee; International Towing Tank Conference: Hague, The Netherlands, 3–10 September 1978. [Google Scholar]
- Townsin, R.L.; Dey, S.K. The Correction of Roughness Drag with Surface Characteristics. In Proceedings of the International Workshop on Marine Roughness and Drag, RINA, London, UK, 29 March 1990. [Google Scholar]
- ITTC. Report of Power Performance Committee. In Proceedings of the International Towing Tank Conference, Madrid, Spain, 16–22 September 1990. [Google Scholar]
- ITTC. 1978 ITTC Performance Prediction Method; ITTC: Copenhagen, Denmark, 2014. [Google Scholar]
- Michell, J. The wave resistance of a ship. Philos. Mag. 1898, 45, 106–123. [Google Scholar] [CrossRef]
- Larsson, L. Will Computational Fluid Dynamics Completely Take the Role of Model Testing? In Proceedings of the 11th WEMT International Conference: The West European Maritime Industry in the Global Challenge of the Next Century, Rotterdam, The Netherlands, 12–14 May 1998. [Google Scholar]
- Larsson, L.; Stern, F.; Visonneau, M. Numerical Ship Hydrodynamics: An Assessment of the Gothenburg 2010 Workshop; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar] [CrossRef]
- Hino, T.; Stern, F.; Larsson, L.; Visonneau, M.; Hirata, N.; Kim, J. Numerical Ship Hydrodynamics: An Assessment of the Tokyo 2015 Workshop; Springer International Publishing: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Sun, W.; Qiong, H.; Jia, S.; Jie, X.; Jinfang, W.; Guofu, H. Numerical Analysis of Full-Scale Ship Self-Propulsion Performance with Direct Comparison to Statistical Sea Trail Results. J. Mar. Sci. Eng. 2020, 8, 24. [Google Scholar] [CrossRef] [Green Version]
- Niklas, K.; Pruszko, H. Full-Scale CFD Simulations for the Determination of Ship Resistance as a Rational, Alternative Method to Towing Tank Experiments. Ocean. Eng. 2019, 190. [Google Scholar] [CrossRef]
- Ponkratov, D. 2016 Workshop on Ship Scale Hydrodynamic Computer Simulation. In Proceedings of the Loyd’s Register Workshop on Ship Scale Hydrodynamics, Southampton, UK, 25 October 2016. [Google Scholar]
- ITTC. 1978 ITTC Performance Prediction Method; ITTC: Wuxi, China, 17–22 September 2017. [Google Scholar]
- García Gómez, A. On the Form Factor Scale Effect. Ocean. Eng. 2000, 26, 97–109. [Google Scholar] [CrossRef]
- Toki, N. Investigation on Correlation Lines through the Analyses of Geosim Model Test Results. J. Jpn. Soc. Nav. Archit. Ocean. Eng. 2008, 8, 71–79. [Google Scholar] [CrossRef] [Green Version]
- Pereira, F.S.; Eça, L.; Vaz, G. Verification and Validation Exercises for the Flow around the KVLCC2 Tanker at Model and Full-Scale Reynolds Numbers. Ocean. Eng. 2017, 129, 133–148. [Google Scholar] [CrossRef]
- Terziev, M.; Tezdogan, T.; Incecik, A. A Geosim Analysis of Ship Resistance Decomposition and Scale Effects with the Aid of CFD. Appl. Ocean. Res. 2019, 92. [Google Scholar] [CrossRef]
- Wang, Z.Z.; Xiong, Y.; Shi, L.P.; Liu, Z.H. A Numerical Flat Plate Friction Line and Its Application. J. Hydrodyn. 2015, 23, 383–393. [Google Scholar] [CrossRef]
- Dogrul, A.; Song, S.; Demirel, Y.K. Scale effect on ship resistance components and form factor. Ocean. Eng. 2020, 209, 107428. [Google Scholar] [CrossRef]
- Korkmaz, K.B.; Werner, S.; Bensow, R. Investigations for CFD Based Form Factor Methods. In Proceedings of the Numerical Towing Tank Symposium (NuTTS 2019), Tomar, Portugal, 29 September–1 October 2019. [Google Scholar]
- Korkmaz, K.B.; Werner, S.; Sakamoto, N.; Queutey, P.; Deng, G.; Yuling, G.; Guoxiang, D.; Maki, K.; Ye, H.; Akinturk, A.; et al. CFD Based Form Factor Determination Method. Ocean. Eng. 2021, 220, 108451. [Google Scholar] [CrossRef]
- Wang, J.B.; Yu, H.; Feng, Y. Feasible Study on Full-Scale Delivered Power Prediction Using CFD/EFD Combination Method. J. Hydrodyn. 2019, 31. [Google Scholar] [CrossRef]
- Korkmaz, K.B.; Werner, S.; Bensow, R. Numerical Friction Lines for CFD Based Form Factor Determination Method. In Proceedings of the VIII International Conference on Computational Methods in Marine Engineering MARINE 2019, Göteborg, Sweden, 13–15 May 2019. [Google Scholar]
- Broberg, L.; Regnström, B.; Östberg, M. SHIPFLOW Users Manual; FLOWTECH International AB: Gothenburg, Sweden, 2014. [Google Scholar]
- Deng, G.; Visonneau, M. Evaluation of eddy-viscosity and second-moment turbulence closures for steady flows around ships. In Proceedings of the 21st ONR Symposium on Naval Hydrodynamics, Trondheim, Norway, 24–28 June 1996; pp. 453–469. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Regnström, B. Introduction to Overlapping Grids in SHIPFLOW; FLOWTECH International AB: Gothenburg, Sweden, 2008. [Google Scholar]
- Hellsten, A. Some improvements in Menter’s k-omega SST turbulence model. In Proceedings of the 29th AIAA, Fluid Dynamics Conference, Albuquerque, NM, USA, 15–18 June 1998. [Google Scholar] [CrossRef]
- ITTC. Preparation, Conduct and Analysis of Speed/Power Trials; ITTC: Wuxi, China, 17–22 September 2017. [Google Scholar]
- ISO. Ships and Marine Technology—Guidelines for the Assessment of Speed and Power Performance by Analysis of Speed Trial Data; ISO: Geneva, Switzerland, 2015. [Google Scholar]
- Eça, L.; Hoekstra, M. A procedure for the estimation of the numerical uncertainty of CFD calculations based on grid refinement studies. J. Comput. Phys. 2014, 262, 104–130. [Google Scholar] [CrossRef]
- Eça, L.; Hoekstra, M. The Numerical Friction Line. J. Mar. Sci. Technol. Mar. Sci. Technol. 2008, 13, 328–345. [Google Scholar] [CrossRef]
- Eça, L.; Pereira, F.S.; Vaz, G. Viscous flow simulations at high Reynolds numbers without wall functions: Is y+≃1 enough for the near-wall cells? Comput. Fluids 2018, 170, 157–175. [Google Scholar] [CrossRef]
- Schlichting, H.; Gersten, K. Boundary-Layer Theory; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Raven, H.C.; van der Ploeg, A.; Starke, A.R.; Eça, L. Towards a CFD-based prediction of ship performance—Progress in predicting full-scale resistance and scale effects. Int. J. Marit. Eng. 2008, 150, 31–42. [Google Scholar]
- Van, S.H.; Ahn, H.; Lee, Y.Y.; Kim, C.; Hwang, S.; Kim, J.; Kim, K.S.; Park, I.R. Resistance Characteristics and Form Factor Evaluation for Geosim Models of KVLCC2 and KCS. In Proceedings of the 2nd International Conference on Advanced Model Measurement Technology for EU, Newcastle upon Tyne, UK, 4–5 April 2011; pp. 282–293. [Google Scholar]
- ITTC. Uncertainty Analysis in CFD Verification and Validation Methodology and Procedures; ITTC: Wuxi, China, 17–22 September 2017. [Google Scholar]
- ITTC. General Guideline for Uncertainty Analysis in Resistance Tests. In Proceedings of the ITTC—Recommended Procedures and Guidelines, 7.5–02.02–02, Revision 02, Copenhagen, Denmark, 31 August–5 September 2014. [Google Scholar]
- ITTC. Practical Guide for Uncertainty Analysis of Resistance Measurement in Routine Tests. In Proceedings of the ITTC—Recommended Procedures and Guidelines, 7.5–02.02–02.2, Revision 00, Copenhagen, Denmark, 31 August–5 September 2014. [Google Scholar]
- York, D.; Evensen, N.; Ló, M.; Nez, M.; De, J.; Delgado, B. Unified equations for the slope, intercept, and standard errors of the best straight line. Am. J. Phys.—Am. Phys. 2004, 72. [Google Scholar] [CrossRef]
- Werner, S.; Gustafsson, L. Uncertainty of Speed Trials. In Proceedings of the HullPIC 2020, Hamburg, Germany, 26–28 October 2020. [Google Scholar]
- Insel, M. Uncertainty in the analysis of speed and powering trials. Ocean. Eng. 2008, 35, 1183–1193. [Google Scholar] [CrossRef]
- ITTC. Guidelines on the determination of model-ship correlation factors. In Proceedings of the ITTC—Recommended Procedures and Guidelines, 7.5-04-05-01, Revision 0, Wuxi, China, 17–22 September 2017. [Google Scholar]
- ITTC. Report of Propulsion Committee; ITTC: Seul, Korea; Shanghai, China, 5–11 September 1999. [Google Scholar]
- Lindgren, H.; Dyne, G. Ship Performance Prediction. In Proceedings of the International Symposium on Advances in Marine Technology, Trondheim, Norway, June 1979. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| U S | Turb. Model | H1 | H2-b | H2-d | H2-s | H3 | H4 |
|---|---|---|---|---|---|---|---|
| C | EASM | 1.2 | 0.6 | 1.3 | 1.1 | 1.1 | 4.5 |
| SST | 1.5 | 0.7 | 0.5 | 1.2 | 1.3 | 1.0 | |
| C | EASM | 37.2 | 4.1 | 52.6 | 20.1 | 7.8 | 13.2 |
| SST | 61.2 | 4.1 | 52.9 | 20.7 | 9.1 | 8.2 | |
| C | EASM | 6.9 | 1.1 | 10.6 | 4.7 | 2.2 | 6.0 |
| SST | 10.2 | 1.1 | 9.5 | 4.8 | 2.5 | 2.2 |
| Form Factor | Turb. Model | H1 | H2-b | H2-d | H2-s | H3 | H4 |
|---|---|---|---|---|---|---|---|
| U D | EASM | 7.6 | 2.0 | 11.7 | 5.4 | 2.9 | 7.0 |
| SST | 11.2 | 2.5 | 10.7 | 5.6 | 3.2 | 3.2 | |
| U D | - | 1.3 | 1.3 | 1.8 | 1.5 | 2.0 | 1.8 |
| D | EASM | 1.6 | 2.4 | 1.1 | 0.3 | 1.5 | 0.1 |
| SST | 0.2 | 0.3 | 2.8 | 2.0 | 0.1 | 1.8 | |
| U D | EASM | 7.7 | 2.4 | 11.9 | 5.7 | 3.5 | 7.2 |
| SST | 11.2 | 2.8 | 10.8 | 5.8 | 3.8 | 3.7 |
| u< | Number Speed Trials | Quantitiy | Standard ITTC-78 | CFD Based k, ITTC-57 Line with EASM | CFD Based k, ITTC-57 Line with SST | CFD Based k, NFL with EASM | CFD Based k, NFL with SST |
|---|---|---|---|---|---|---|---|
| 4.9% | 4.7% | 5.0% | 4.3% | 4.3% | |||
| 4 | 46 | 5% < Error <10% | 19% | 15% | 19% | 13% | 13% |
| 10% < Error | 7% | 9% | 9% | 4% | 4% | ||
| 5.8% | 5.3% | 5.7% | 4.4% | 4.6% | |||
| 6 | 69 | 5% < Error <10% | 21% | 19% | 24% | 18% | 19% |
| 10% < Error | 9% | 9% | 9% | 4% | 4% | ||
| 5.6% | 5.2% | 5.6% | 4.2% | 4.4% | |||
| 8 | 78 | 5% < Error <10% | 20% | 20% | 24% | 11% | 16% |
| 10% < Error | 9% | 8% | 9% | 4% | 5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korkmaz, K.B.; Werner, S.; Bensow, R. Verification and Validation of CFD Based Form Factors as a Combined CFD/EFD Method. J. Mar. Sci. Eng. 2021, 9, 75. https://doi.org/10.3390/jmse9010075
Korkmaz KB, Werner S, Bensow R. Verification and Validation of CFD Based Form Factors as a Combined CFD/EFD Method. Journal of Marine Science and Engineering. 2021; 9(1):75. https://doi.org/10.3390/jmse9010075
Chicago/Turabian StyleKorkmaz, Kadir Burak, Sofia Werner, and Rickard Bensow. 2021. "Verification and Validation of CFD Based Form Factors as a Combined CFD/EFD Method" Journal of Marine Science and Engineering 9, no. 1: 75. https://doi.org/10.3390/jmse9010075
APA StyleKorkmaz, K. B., Werner, S., & Bensow, R. (2021). Verification and Validation of CFD Based Form Factors as a Combined CFD/EFD Method. Journal of Marine Science and Engineering, 9(1), 75. https://doi.org/10.3390/jmse9010075