A Comparative Study of Computational Methods for Wave-Induced Motions and Loads



Abstract
:1. Introduction
2. Numerical Methods
2.1. Strip Theory Method
2.2. Rankine Source Boundary Element Method
2.3. Field Method
2.4. Green Function Boundary Element Method
3. Investigated Ships and Model Tests
4. Computational Setup
4.1. Strip Theory Method
4.2. Rankine Source Boundary Element Method
4.3. Field Method
4.4. Green Function Boundary Element Method
5. Results
5.1. Regular Waves
5.1.1. Cruise Ship
5.1.2. Containership
5.1.3. LNG Carrier
5.1.4. Chemical Tanker
5.2. Irregular Extreme Waves
5.2.1. Investigated Sea States
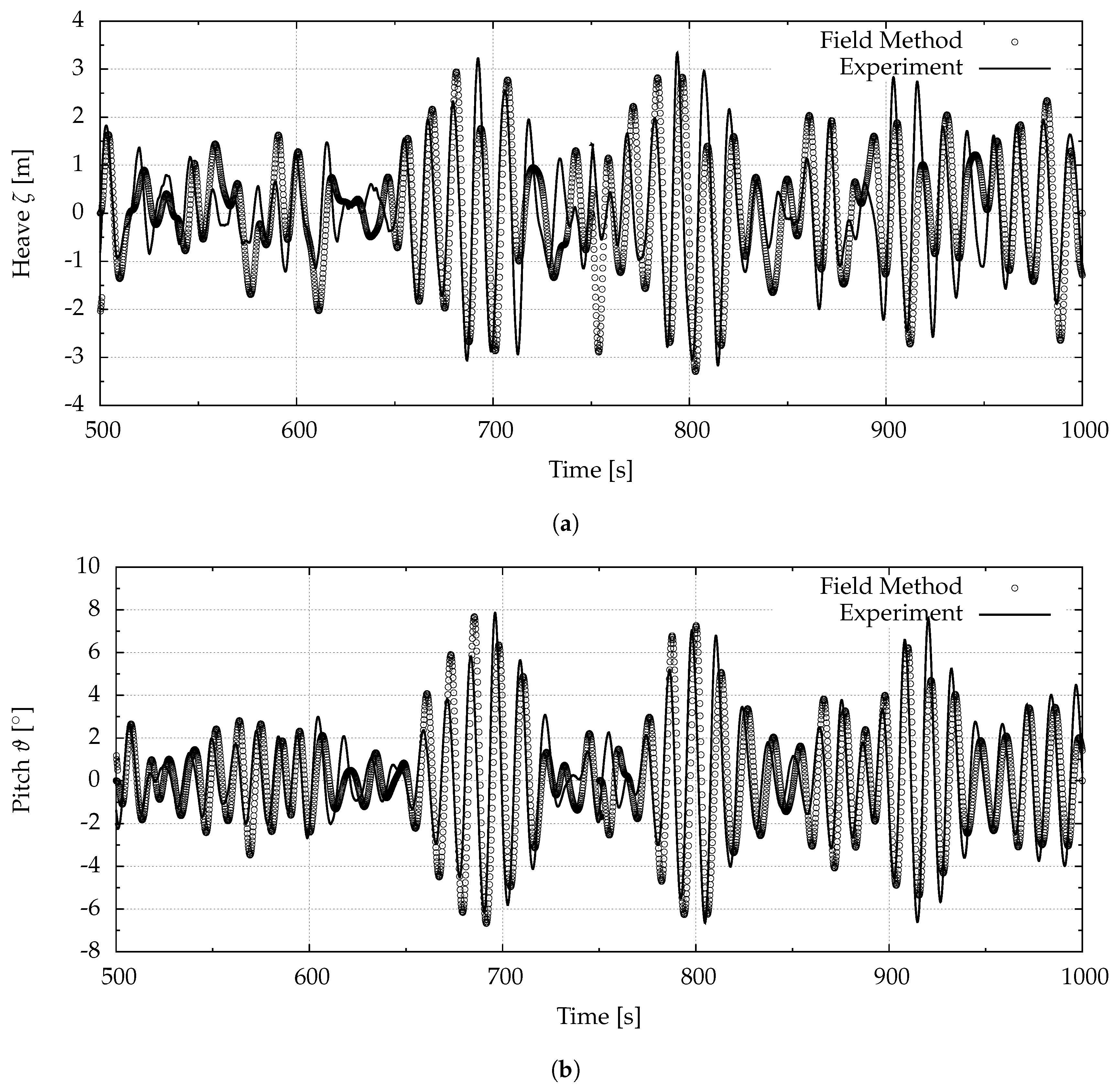
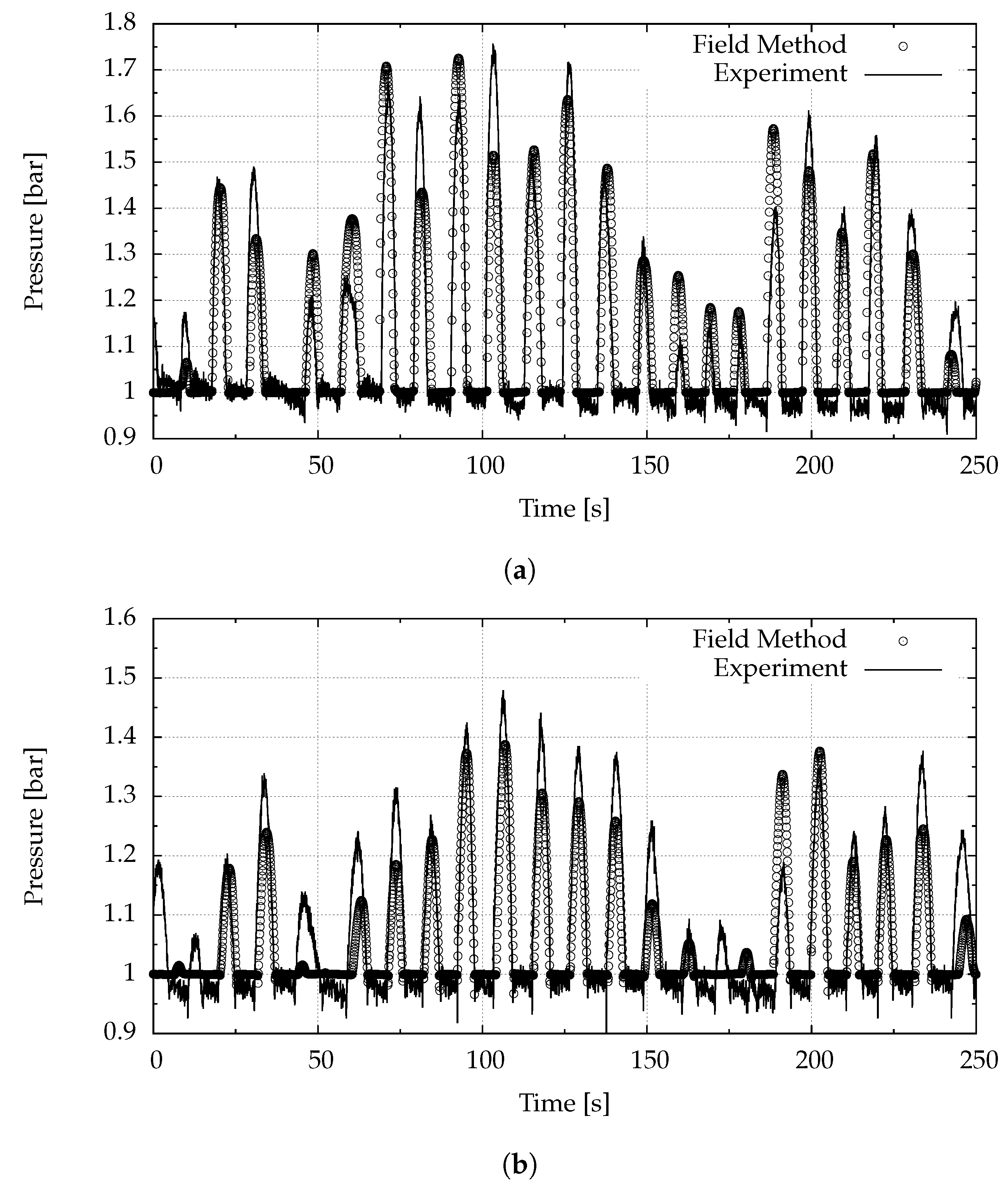
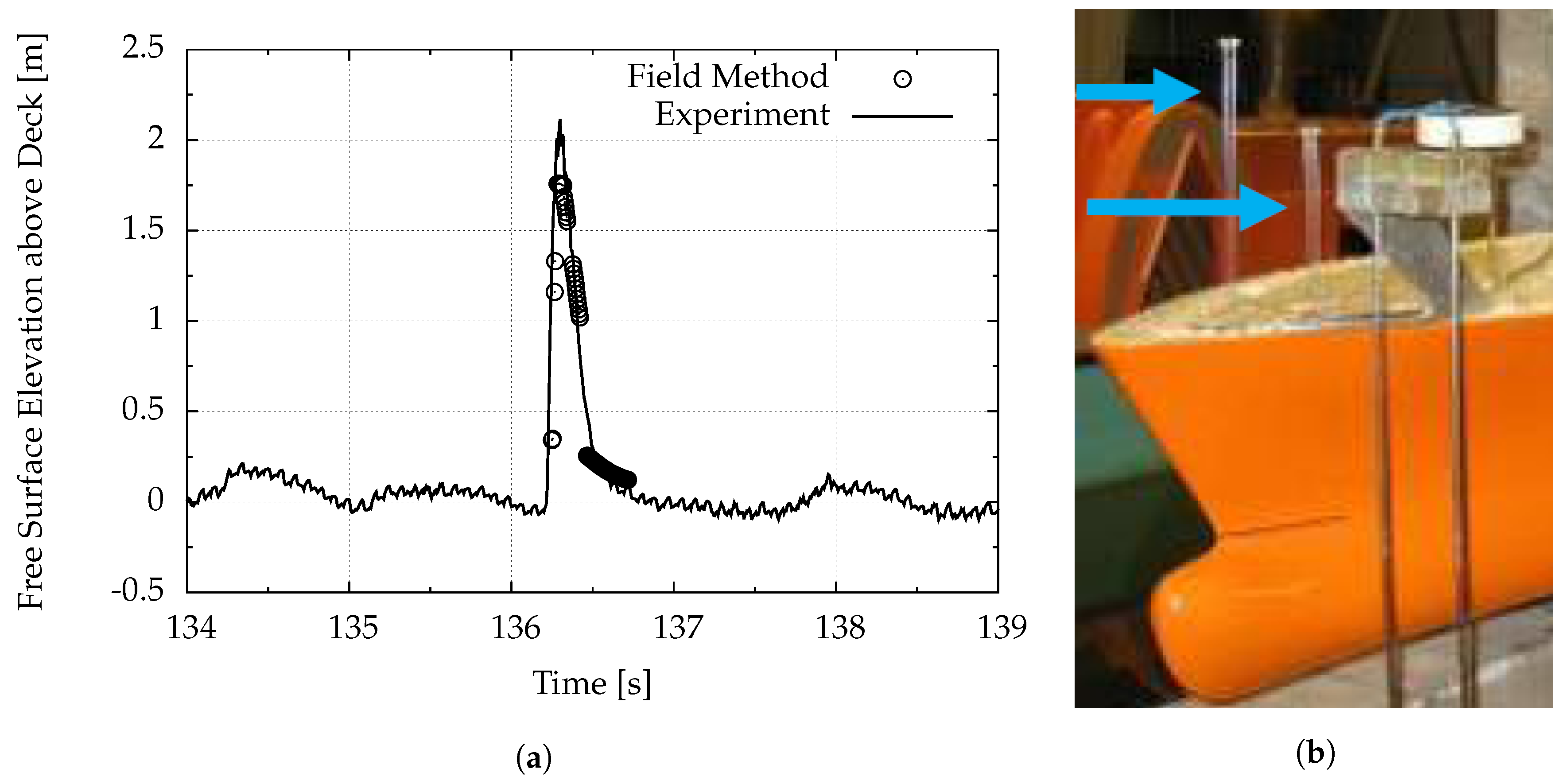
5.2.2. Time Histories
Cruise Ship
LNG Carrier
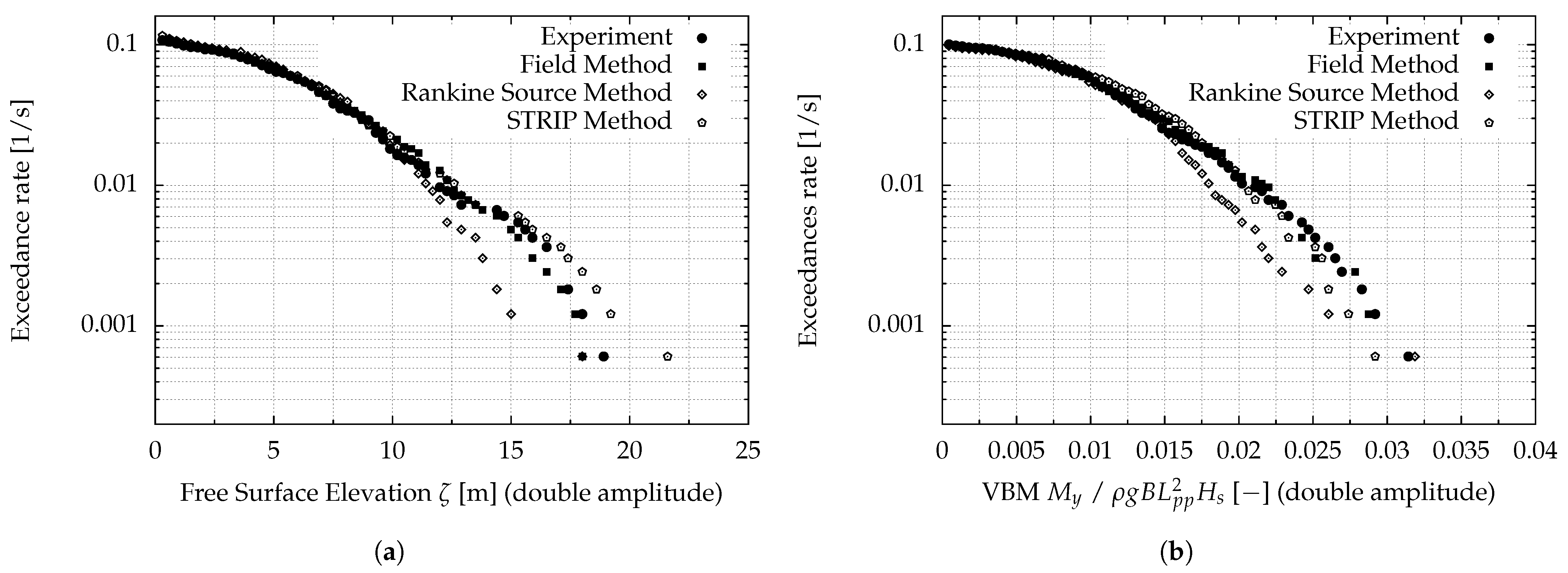
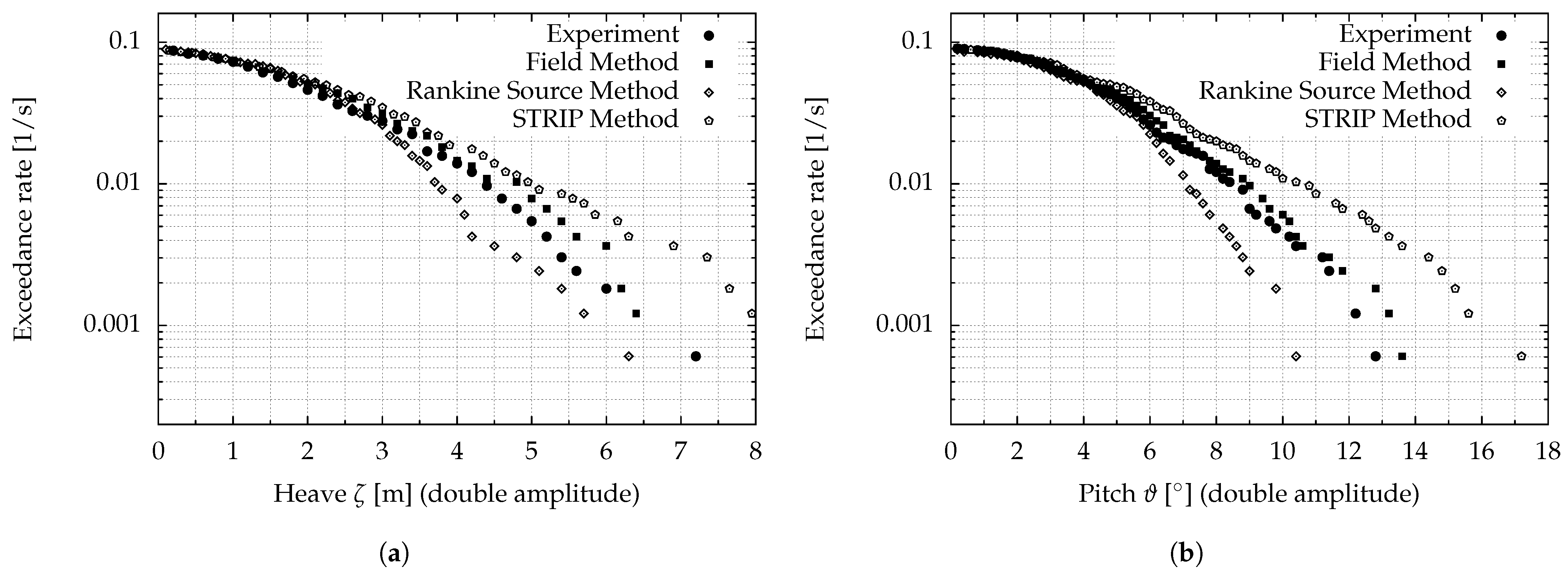
5.2.3. Short-Term Statistics
Cruise Ship
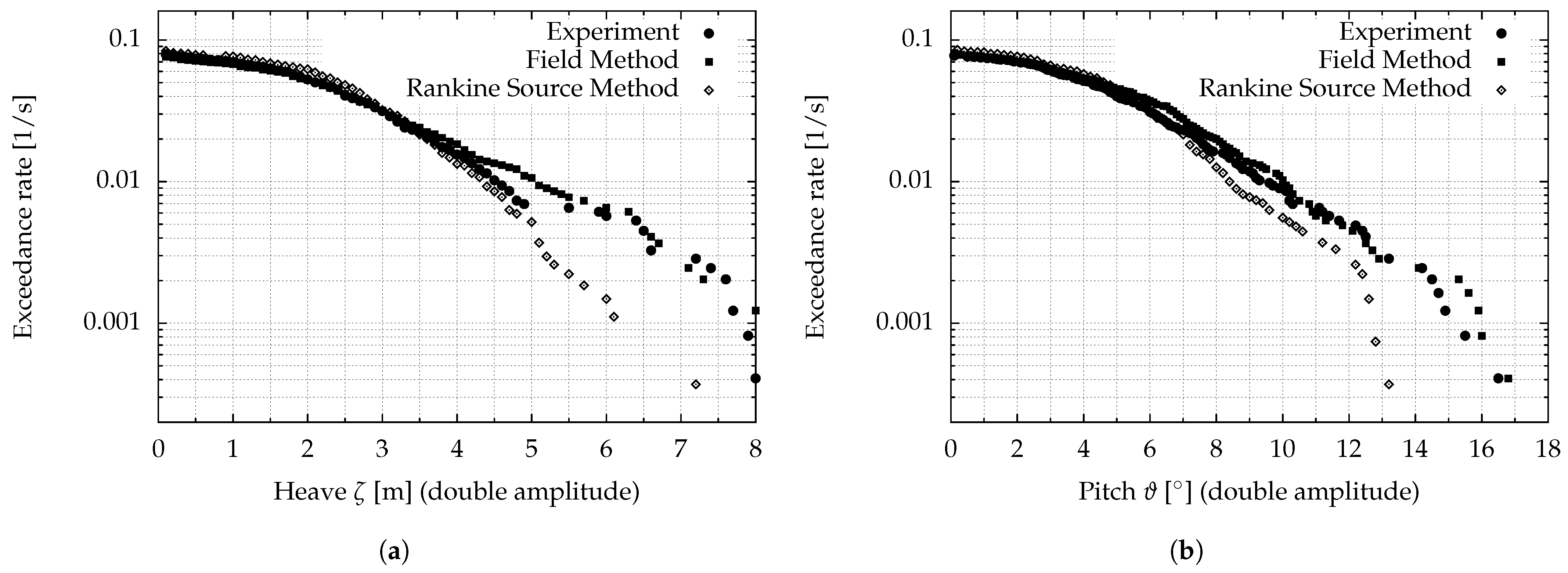
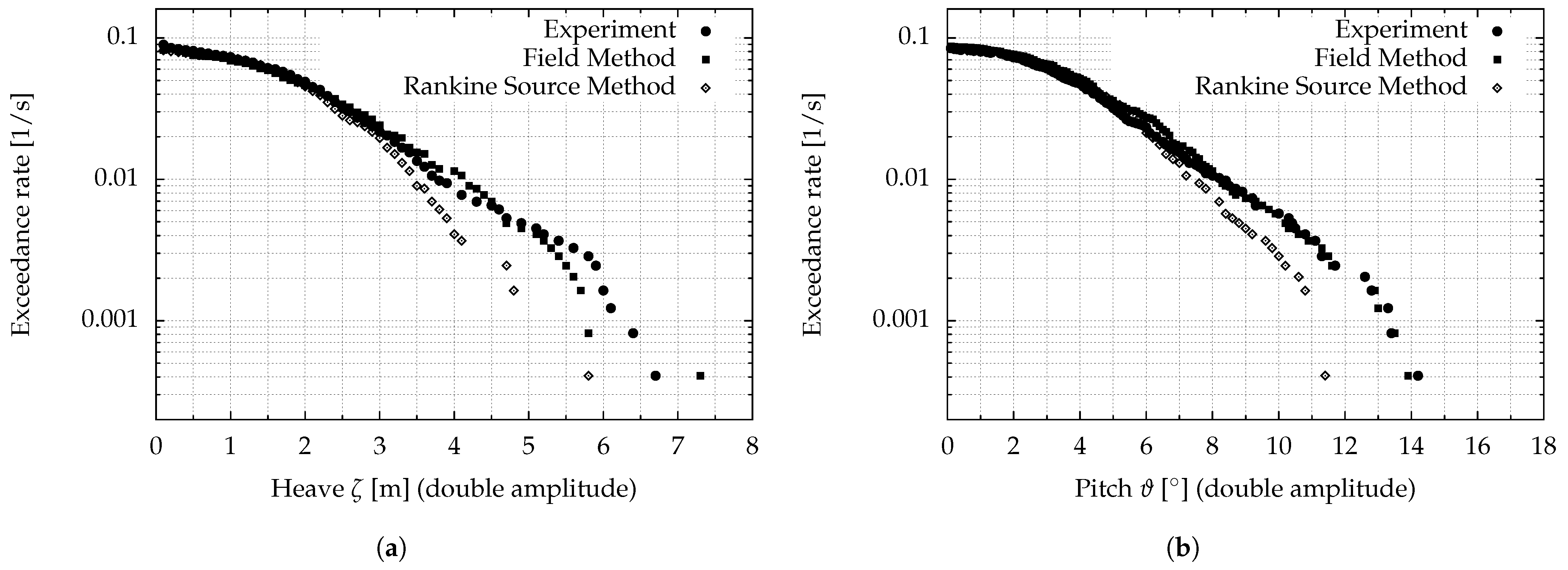
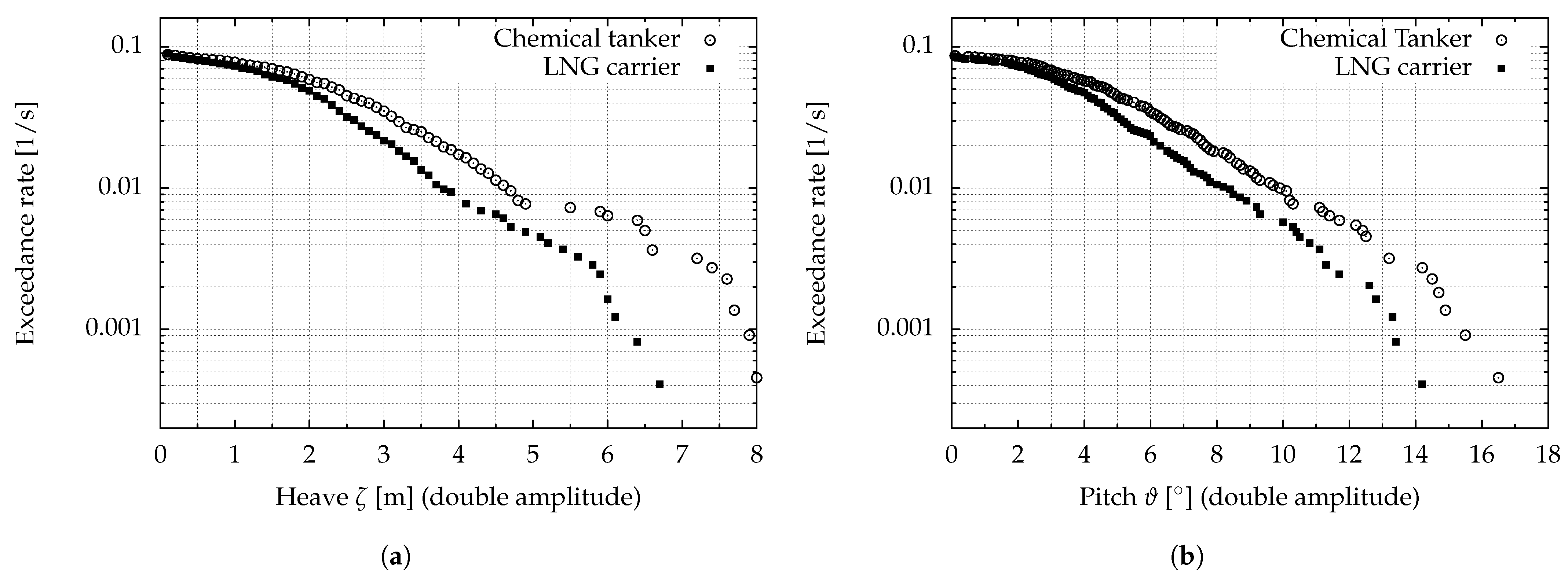
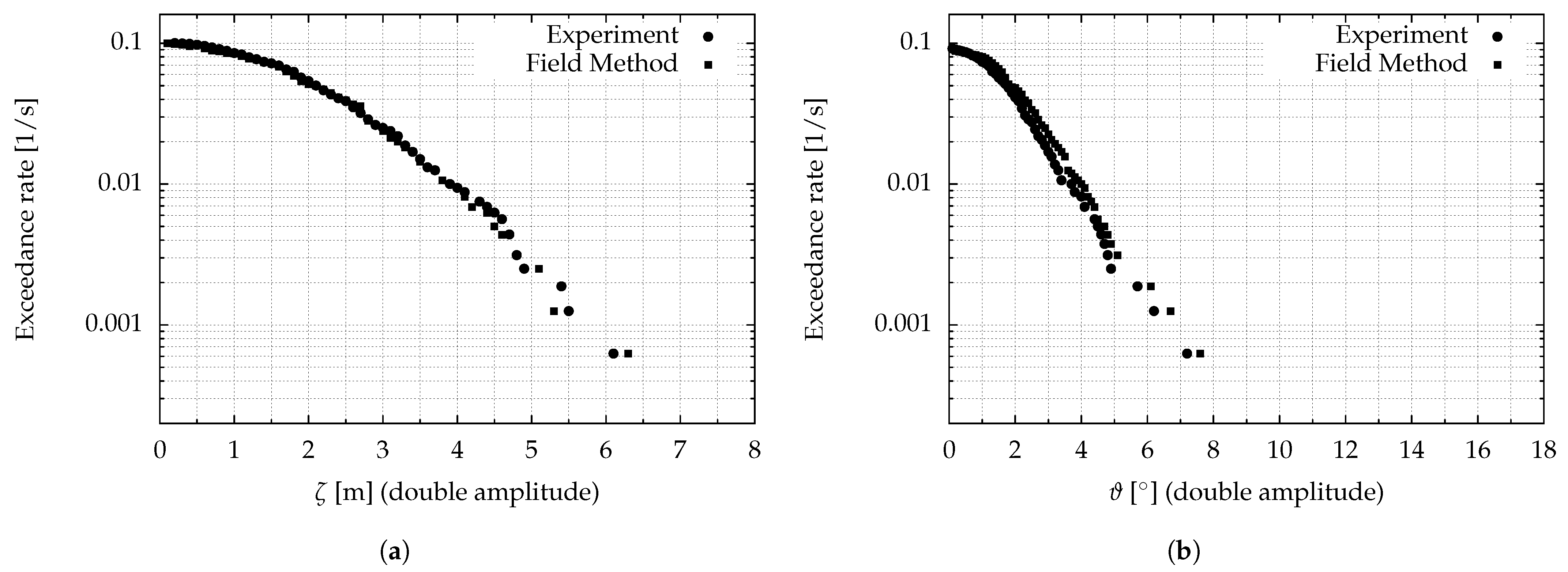
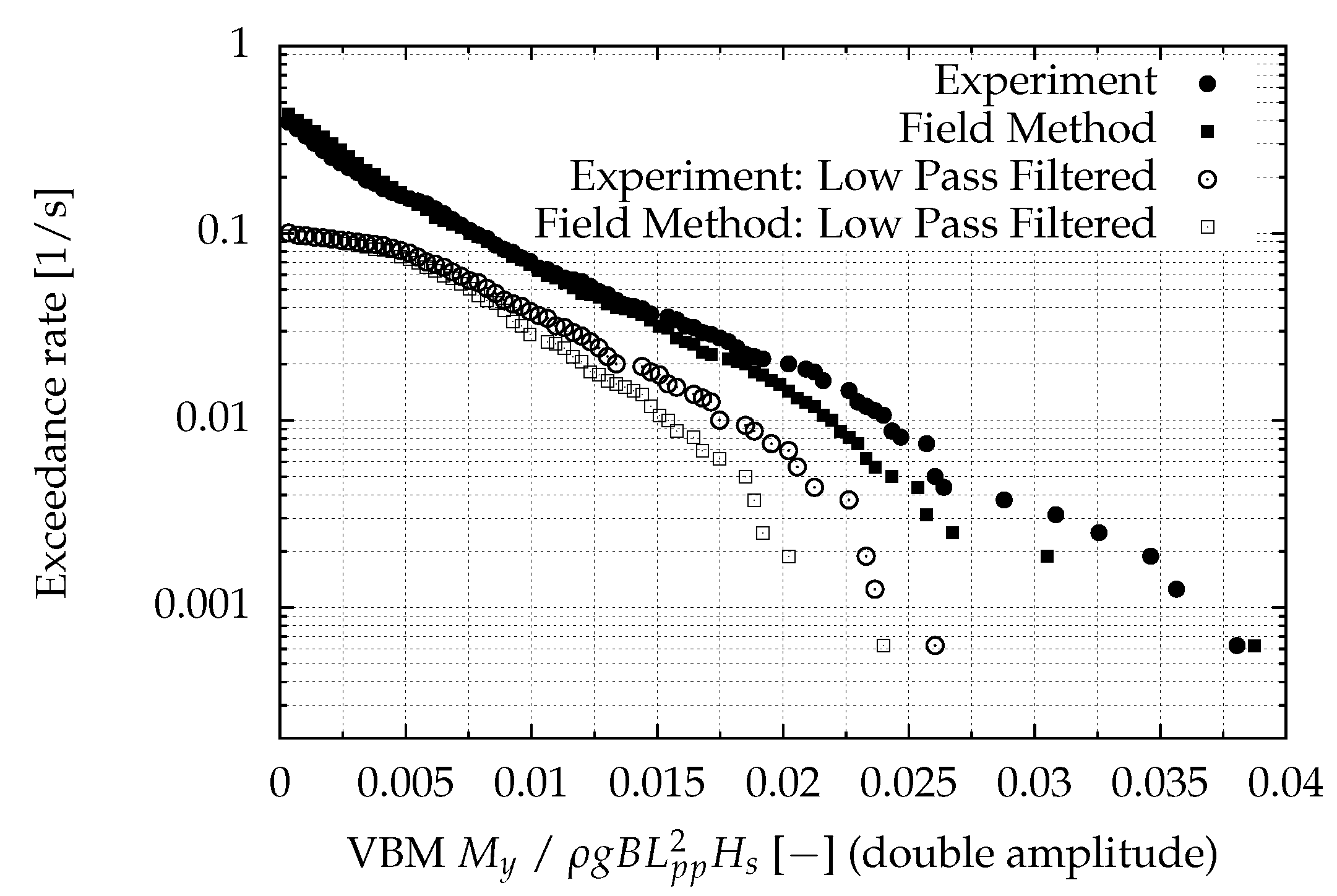
Chemical Tanker and LNG Carrier
Containership
6. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Union of Marine Insurance. 2016. Available online: http://www.iumi.com/ (accessed on 25 July 2020).
- Bishop, R.E.D.; Price, W.G. Hydroelasticity of Ships; Cambridge University Press: Cambridge, UK, 1979; ISBN 780521017800. [Google Scholar]
- Kahl, A.; Menzel, W. Full-Scale Measurements on a PanMax Containership. In Proceedings of the Ship Repair Technology Symposium Proc., Newcastle upon Tyne, UK, 1–2 September 2008; pp. 59–66. [Google Scholar]
- Storhaug, G.; Vidic-Perunovic, J.; Rüdinger, F.; Holtsmark, G.; Helmers, J.B.; Gu, X. Springing/Whipping Response of a Large Ocean Going Vessel—A Comparison between Numerical Simulations an Full-Scale Measurements. In Proceedings of the 3rd International Conference on Hydroelasticity in Marine Technology, Oxford, UK, 15–17 September 2003; pp. 117–131. [Google Scholar]
- Storhaug, G. Experimental Investigation of Wave Induced Vibrations and Their Effect on the Fatigue Loading of Ships. Ph.D. Thesis, Norwegian University of Science and Technology, Oslo, Norway, 2007. [Google Scholar]
- Vidic-Perunovic, J.; Jensen, J.J. Non-Linear Springing Excitation due to a Bidirectional Wave Field. Mar. Struct. 2005, 18, 332–358. [Google Scholar] [CrossRef]
- Hong, S.Y. Wave Induced Loads on Ships Joint Industry Project—II. In First Year Model Test Report; Technical Report No. BSPIS503 A-2112-2 (Confidential); MOERI: Daejeon, Korea, 2009. [Google Scholar]
- Hong, S.Y. Wave Induced Loads on Ships Joint Industry Project—II. In Technical Report No. BSPIS503 A-2207-2; MOERI: Daejeon, Korea, 2010. [Google Scholar]
- Hong, S.Y. Wave Induced Loads on Ships Joint Industry Project—III. In Technical Report No. BSPIS7230-10306-6; MOERI: Daejeon, Korea, 2013. [Google Scholar]
- Hirdaris, S.E.; Miao, S.H.; Price, W.G.; Temarel, P. The Influence of Structural Modelling on the Dynamic Behaviour of a Bulker in Waves. In Proceedings of the 4th International Conference on Hydroelasticity in Marine Technology, Wuxi, China, 9–13 September 2006; Volume 1, pp. 25–33, ISBN 7-118-04728-7. [Google Scholar]
- Hirdaris, S.E.; Temarel, P. Hydroelasticity of Ships—Recent Advances and Future Trends. Proc. IMechE Part M J. Eng. Marit. Environ. 2009, 223, 305–330. [Google Scholar] [CrossRef]
- Hirdaris, S.E.; Lee, Y.; Mortola, G.; Incecik, A.; Turan, O.; Hong, S.Y.; Kim, B.W.; Kim, K.H.; Bennett, S.; Miao, S.H.; et al. The Influence of Nonlinearities on the Symmetric Hydrodynamic Response of a 10,000 TEU Container Ship. Ocean. Eng. 2016, 111, 166–178. [Google Scholar] [CrossRef] [Green Version]
- El Moctar, O.; Oberhagemann, J.; Schellin, T.E. Free Surface RANS Method for Hull Girder Springing and Whipping. SNAME Trans. 2011, 119, 48–66. [Google Scholar]
- Oberhagemann, J.; Ley, J.; el Moctar, O. Prediction of Ship Response Statistics in Severe Sea Conditions using RANSE. In Proceedings of the ASME 31th International Conf. on Ocean, Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; pp. 461–468. [Google Scholar]
- El Moctar, O.; Ley, J.; Oberhagemann, J.; Schellin, T.E. Nonlinear Computational Methods for Hydroelastic Effects of Ships in Extreme Seas. Ocean Eng. 2017, 130, 659–673. [Google Scholar] [CrossRef]
- Hirdaris, S.E.; Miao, S.H.; Temarel, P. The Effect of Structural Discontinuity on Antisymmetric Response of a Container Ship. In Proceedings of the 5th International Conference on Hydroelasticity in Marine Technology, Southampton, UK, 7–9 September 2009; Volume 1, pp. 57–68, ISBN 9780854329045. [Google Scholar]
- International Ship and Offshore Structures Congress. In Proceedings of the 20th International Ship and Offshore Structures Congress, Amsterdam, The Netherlands, 9–14 September 2018; Volume 1.
- Hirdaris, S.E.; Bai, W.; Dessi, D.; Ergin, A.; Gu, X.; Hermundstad, O.A.; Huijsmans, R.; Iijima, K.; Nielsen, U.D.; Parunov, J.; et al. Loads for Use in the Design of Ships and Offshore Structures. Ocean Eng. 2014, 78, 131–174. [Google Scholar] [CrossRef]
- Newman, J.N. The Theory of Ship Motions. Adv. Appl. Mech. 1978, 18, 222–283. [Google Scholar]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Söding, H. Ermittlung der Kentergefahr aus Bewegungssimulationen. Ship Technol. Res.-Schiffstechnik 1987, 34, 28–39. [Google Scholar]
- Jensen, J.J. Load and Global Response of Ships; Elsevier Ocean Engineering Book Series; Elsevier: Amsterdam, The Netherlands, 2001; Volume 4. [Google Scholar]
- Fonseca, N.; Guedes Soares, C. Time-Domain Analysis of Large-Amplitude Vertical Ship Motions and Wave Loads. J. Ship Res. 1998, 42, 139–153. [Google Scholar]
- Söding, H.; Shigunov, V.; Schellin, T.E.; el Moctar, O. A Rankine Panel Method for Added Resistance of Ships in Waves. J. Offshore Mech. Arct. Eng. 2014, 136, 031601. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, K.-H.; Kim, Y. Springing Analysis of a Seagoing Vessel Using Fully Coupled BEM-FEM in the Time Domain. Ocean Eng. 2009, 785–796. [Google Scholar] [CrossRef]
- Sclavounos, P.D. Nonlinear Impulse of Ocean Waves on Floating Bodies. J. Fluid Mech. 2012, 697, 316–335. [Google Scholar] [CrossRef] [Green Version]
- Riesner, M.; Chillcce, G.; el Moctar, O.; Schellin, T.E. Rankine Source Time Domain Method for Nonlinear Ship Motions in Steep Oblique Waves. Ship Offshore Struct. 2018, 14, 295–308. [Google Scholar] [CrossRef]
- Riesner, M.; el Moctar, O. A Time Domain Boundary Element Method for Wave Added Resistance of Ships Taking into Account Viscous Effects. Ocean Eng. 2018, 162, 290–303. [Google Scholar] [CrossRef]
- Shao, Y.L.; Faltinsen, O.M. Numerical Study of the Second-order Wave Loads on a Ship with Forward Speed. In Proceedings of the 26th International Workshop on Water Waves and Floating Bodies, Athens, Greece, 17–20 April 2011. [Google Scholar]
- Papanikolaou, A.; Schellin, T.E. A Three-Dimensional Panel Method for Motions and Loads of Ships with Forward Speed. J. Ship Technol. Res. 1991, 39, 147–156. [Google Scholar]
- El Moctar, O.; Brehm, A.; Schellin, T.E. Prediction of Slamming Loads for Ship Structural Design using Potential Flow and RANSE Codes. In Proceedings of the 25th Symposium on Naval Hydrodynamics, St. John’s, NL, Cananda, 8–13 August 2004. [Google Scholar]
- El Moctar, O.; Schellin, T.; Priebe, T. CFD and FE Methods to Predict Wave Loads and Ship Structure Response. In Proceedings of the 26th Symposium on Naval Hydrodynamics, Rome, Italy, 17–22 September 2006. [Google Scholar]
- Oberhagemann, J.; el Moctar, O. Numerical and Experimental Investigations of Whipping and Springing of Ship Structures. Int. J. Offshore Polar Eng. 2012, 22, 108–114. [Google Scholar]
- Oberhagemann, J.; Ley, J.; Shigunov, V.; el Moctar, O. Efficient Approaches for Ship Response Statistics using RANS. In Proceedings of the 22nd International Society of Offshore and Polar Engineers Conference, Rhodos, Greece, 17–23 June 2012. [Google Scholar]
- Oberhagemann, J. On Prediction of Wave-Induced Loads and Vibration of Ship Structures with Finite Volume Fluid Dynamic Methods. Ph.D. Thesis, University of Duisburg-Essen, Duisburg, Germany, 2016. [Google Scholar]
- Ley, J.; Oberhagemann, J.; Amian, C.; Langer, M.; Shigunov, V.; Rathje, H.; Schellin, T.E. Green Water Loads on a Cruise Ship. In Proceedings of the 32nd International Conference on Offshore Mechanics & Arctic Engineering, OMAE 2013-10132, Nantes, France, 9–14 June 2013. [Google Scholar]
- Ley, J.; el Moctar, O.; Oberhagemann, J.; Schellin, T.E. Assessment of Loads and Structural Integrity of Ships in Extreme Seas. In Proceedings of the 30th Symposium on Naval Hydrodynamics, Hobart, Australia, 2–7 November 2014. [Google Scholar]
- Ley, J.; el Moctar, O. An Enhanced 1-Way Coupling Method to Predict Elastic Global Hull Girder Loads. In Proceedings of the ASME 2014 33th International Conference on Ocean, Offshore and Arctic Engineering, OMAE, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Paik, K.J.; Carrica, P.M.; Lee, D.; Maki, K. Strongly Coupled Fluid-Structure Interaction Method for Structural Loads on Surface Ships. J. Ocean Eng. 2009, 36, 1346–1357. [Google Scholar] [CrossRef]
- Seng, S.; Jensen, J.J. Slamming Simulations in a Conditional Wave. In Proceedings of the 31st International Conference on Ocean, Offshore and Arctic Engineering, OMAE2012-83310, Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Seng, S.; Vincent, I.; Jensen, J. On the Influence of Hull Girder Flexibility on the Wave induced Bending Moments. In Proceedings of the 6th International Conference on Hydroelasticity in Marine Technology, Tokyo, Japan, 19–21 September 2012; pp. 341–553. [Google Scholar]
- Craig, M.; Piro, D.; Schambach, L.; Mesa, J.; Kring, D.; Maki, K. A Comparison of Fully-Coupled Hydroelastic Simulation Methods to Predict Slam-Induced Whipping. In Proceedings of the 7th International Conference on Hydroelasticity in Marine Technology, Split, Croatia, 16–19 September 2015. [Google Scholar]
- Robert, M.; Monroy, C.; Reliquet, G.; Drouet, A.; Ducoin, A.; Guillerm, P.E.; Ferrant, P. Hydroelastic Response of a Flexible Barge Investigated with a Viscous Flow Solver. In Proceedings of the 7th International Conference on Hydroelasticity in Marine Technology, Split, Croatia, 16–19 September 2015. [Google Scholar]
- Kim, Y.; Kim, J.H. Benchmark Study on Motions and Loads of a 6750-TEU Containership. Ocean Eng. 2016, 119, 262–273. [Google Scholar] [CrossRef] [Green Version]
- Baarholm, G.S.; Moan, T. Estimation of Nonlinear Long-Term Extremes of Hull Girder Loads in Ships. Mar. Struct. 2000, 13, 495–516. [Google Scholar] [CrossRef]
- Drummen, I.; Wu, M.; Moan, T. Numerical and Experimental Investigations into the Application of Response-Conditioned Waves for Long-Term Nonlinear Analyses. J. Mar. Struct. 2009. [Google Scholar] [CrossRef]
- Rajendran, S.; Fonseca, N.; Guedes Soares, C. Extreme Seas Del. 4.4: Improvements in IST Non-Linear Strip Theory Method; Technical Report; Instituto Superior Técnico: Brussels, Belgium, 2012. [Google Scholar]
- Rajendran, S.; Guedes Soares, C. Numerical Investigation of the Vertical Response of a Containership in Large Amplitude Waves. Ocean. Eng. 2016, 123, 440–451. [Google Scholar] [CrossRef]
- Rajendran, S.; Fonseca, N.; Guedes Soares, C. Simplified Body Nonlinear Time Domain Calculation of Vertical Ship Motions and Wave Loads in Large Amplitude Waves. Ocean Eng. 2015, 107, 157–177. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, H.D.; Guedes Soares, C. Slamming Occurrence for a Chemical Tanker Advancing in Extreme Waves Modelled with the Nonlinear Schrödinger Equation. Ocean Eng. 2016, 119, 135–142. [Google Scholar] [CrossRef]
- Hui, S. Extreme Seas Del. 4.1: A Method Based on WASIM to Simulate Ship Responses in Large Amplitude Incident Waves; Technical Report; Det Norske Veritas: Brussels, Belgium, 2012. [Google Scholar]
- Luo, Y.; Vada, T.; Greco, M. Numerical Investigation of Wave-Body Interaction in Shallow Water. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, OMAE2014-23042, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Pan, Z.; Vada, T.; Han, K. Computation of Wave Added Resistance by Control Surface Integration. In Proceedings of the 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 19–24 June 2016. Paper OMAE2016-54353. [Google Scholar]
- Klein, M.; Maron, A.; Clauss, G.; Dudek, M.; Miguel, F. Extreme Seas Del. 5.4: Specifications of Models Tests; Technical Report; Technical University of Berlin: Brussels, Belgium, 2012. [Google Scholar]
- Gerritsma, J.; Beukelman, W.; Netherlands Ship Research Centre TNO; Shipbuilding Department. Analysis of the Modified Strip Theory for the Calculation of Ship Motions and Wave Bending Moments; Nederlands Scheeps-Studiecentrum TNO: Delft, The Netherlands, 1967. [Google Scholar]
- Hachmann, D. Calculation of pressures on a ship’s hull. Ship Technol. Res.-Schiffstechnik 1991, 38, 111–133. [Google Scholar]
- Maron, A.; Kapsenberg, G. Design of a Ship Model For Hydroelastic Experiments in Waves. Int. J. Nav. Archit. Ocean. Eng. 2014, 6, 1130–1147. [Google Scholar] [CrossRef] [Green Version]
- Pierson, W.; Moskowitz, L. Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of S. A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Hasselmann, K. Measurements of Wind-wave Growth and Swell Decay during the Joint North Sea Wave Project (JONSWAP). Ergänzungsheft 8–12 1973, 1–95. Available online: http://resolver.tudelft.nl/uuid:f204e188-13b9-49d8-a6dc-4fb7c20562fc (accessed on 12 January 2021).
- IACS. Recommendation No. 34 Standard Wave Data. 2001. Available online: http://www.iacs.org.uk/media/2604/rec_34_pdf186.pdf (accessed on 25 July 2020).
| 1 | The propeller’s rate of revolution of the physical models at CEHIPAR was PID-controlled to maintain the mean forward speed. It was aimed to bypass the uncertainty of this condition influenced by the specific control mechanism. |






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cruise Ship | Containership | LNG Carrier | Chemical Tanker | |
|---|---|---|---|---|
| Length overall [m] | 238.00 | 349.00 | 197.10 | 170.00 |
| Length bet. perpendiculars [m] | 216.80 | 333.44 | 186.90 | 161.00 |
| Moulded breadth [m] | 32.20 | 42.80 | 30.38 | 28.00 |
| Design draft [m] | 7.20 | 13.1 | 8.40 | 9.00 |
| Block coefficient [-] | 0.65 | 0.62 | 0.73 | 0.75 |
| Displacement [t] | 34,087 | 125,604 | 35,355 | 30,707 |
| Mass moment of inertia (Ixx) [] | 5.62 × 10 | 3.65 × 10 | 4.90 × 10 | 2.73 × 10 |
| Mass moment of inertia (Iyy) [] | 1.00 × 10 | 8.59 × 10 | 5.95 × 10 | 3.30 × 10 |
| Longitudinal Center of Gravity [m] | 99.60 | 161.94 | 94.88 | 82.51 |
| Vertical Center of Gravity [m] | 15.30 | 19.20 | 8.24 | 6.20 |
| Grid | / | Number of Cells | ||
|---|---|---|---|---|
| Rigid hulls | 10 to 20 | 70 to 160 | 800 to 950 | 600,000–1,800,000 |
| Flexible hulls | 15 to 25 | 100 to 200 | 950 to 1260 | 800,000–2,000,000 |
| Vessel | [deg] | v [kn] | Response Quantity | Field Method | Rankine Source Method | STRIP Method | Green Function Method | Experiment |
|---|---|---|---|---|---|---|---|---|
| Cruise Ship | 180 | , , | ✓ | ✓ | ✓ | ✓ | ✓ | |
| ✓ | ✓ | ✓ | ✓ | |||||
| Containership | 180 | , , | ✓ | ✓ | ✓ | |||
| ✓ | ||||||||
| LNG carrier | 180 | 0 | , , | ✓ | ✓ | ✓ | ✓ | ✓ |
| ✓ | ✓ | ✓ | ||||||
| Chemical tanker | 180 | 0 | , , | ✓ | ✓ | ✓ | ✓ | ✓ |
| ✓ | ✓ | ✓ |
| Ship | [m] | [s] | [-] | s [-] | v [kn] | [s] | Field Method | Rankine Source Method | STRIP Method | Experiment |
|---|---|---|---|---|---|---|---|---|---|---|
| Cruise ship | 10.5 | 12.22 | 3.3 | 0.075 | 6.0 | 1600 | ✓ | ✓ | ✓ | ✓ |
| Containership | 12.5 | 11.80 | 5.0 | 0.089 | 15.0 | 1400 | ✓ | ✓ | ||
| LNG carrier | 10.5 | 12.22 | 3.3 | 0.075 | 0 | 2700 | ✓ | ✓ | ✓ | |
| Chemical tanker | 10.5 | 12.22 | 3.3 | 0.075 | 0 | 2700 | ✓ | ✓ | ✓ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ley, J.; el Moctar, O. A Comparative Study of Computational Methods for Wave-Induced Motions and Loads. J. Mar. Sci. Eng. 2021, 9, 83. https://doi.org/10.3390/jmse9010083
Ley J, el Moctar O. A Comparative Study of Computational Methods for Wave-Induced Motions and Loads. Journal of Marine Science and Engineering. 2021; 9(1):83. https://doi.org/10.3390/jmse9010083
Chicago/Turabian StyleLey, Jens, and Ould el Moctar. 2021. "A Comparative Study of Computational Methods for Wave-Induced Motions and Loads" Journal of Marine Science and Engineering 9, no. 1: 83. https://doi.org/10.3390/jmse9010083
APA StyleLey, J., & el Moctar, O. (2021). A Comparative Study of Computational Methods for Wave-Induced Motions and Loads. Journal of Marine Science and Engineering, 9(1), 83. https://doi.org/10.3390/jmse9010083