Preventive Maintenance of a k-out-of-n System with Applications in Subsea Pipeline Monitoring




Abstract
:1. Introduction, Motivation and an Example
1.1. Introduction
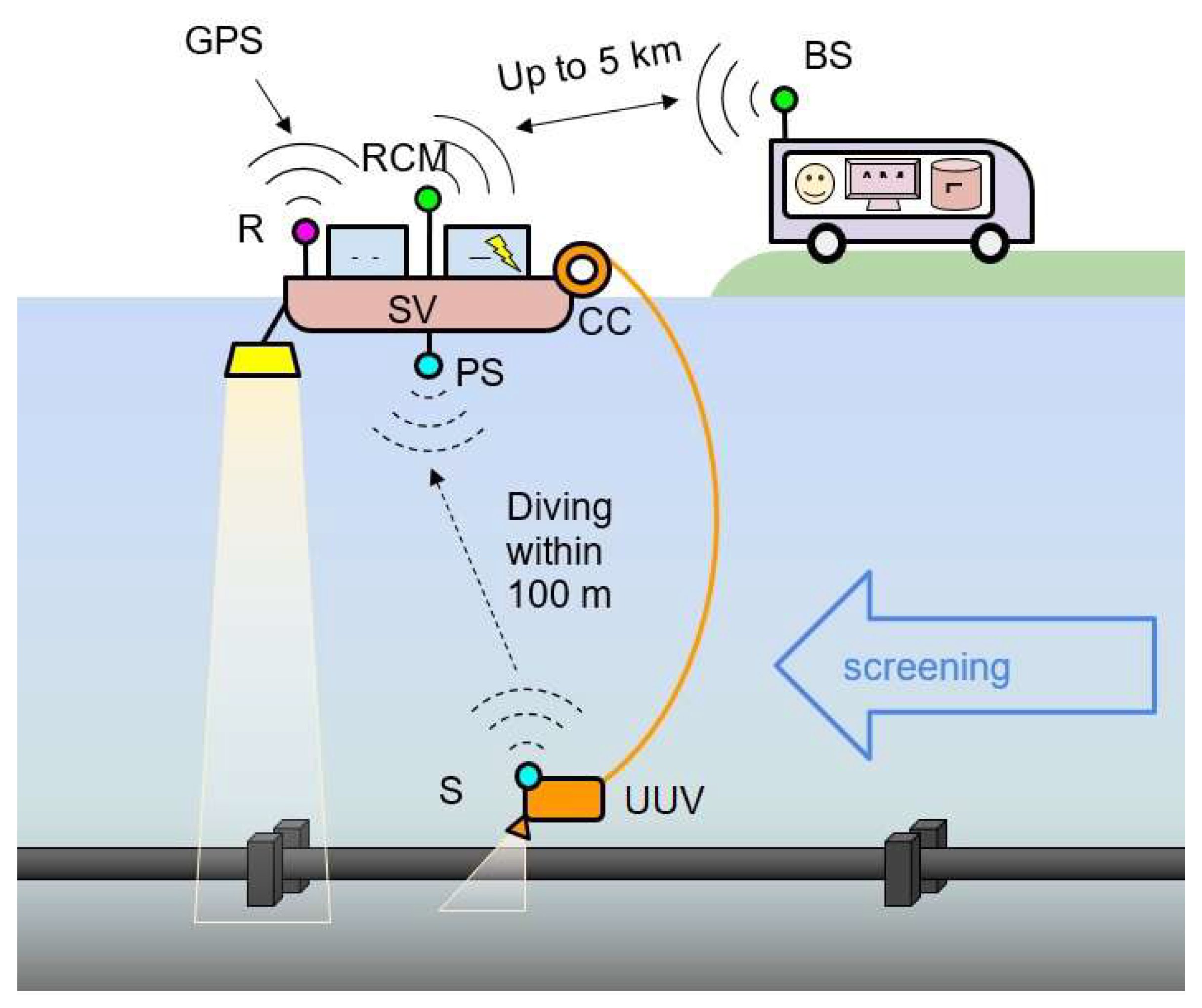
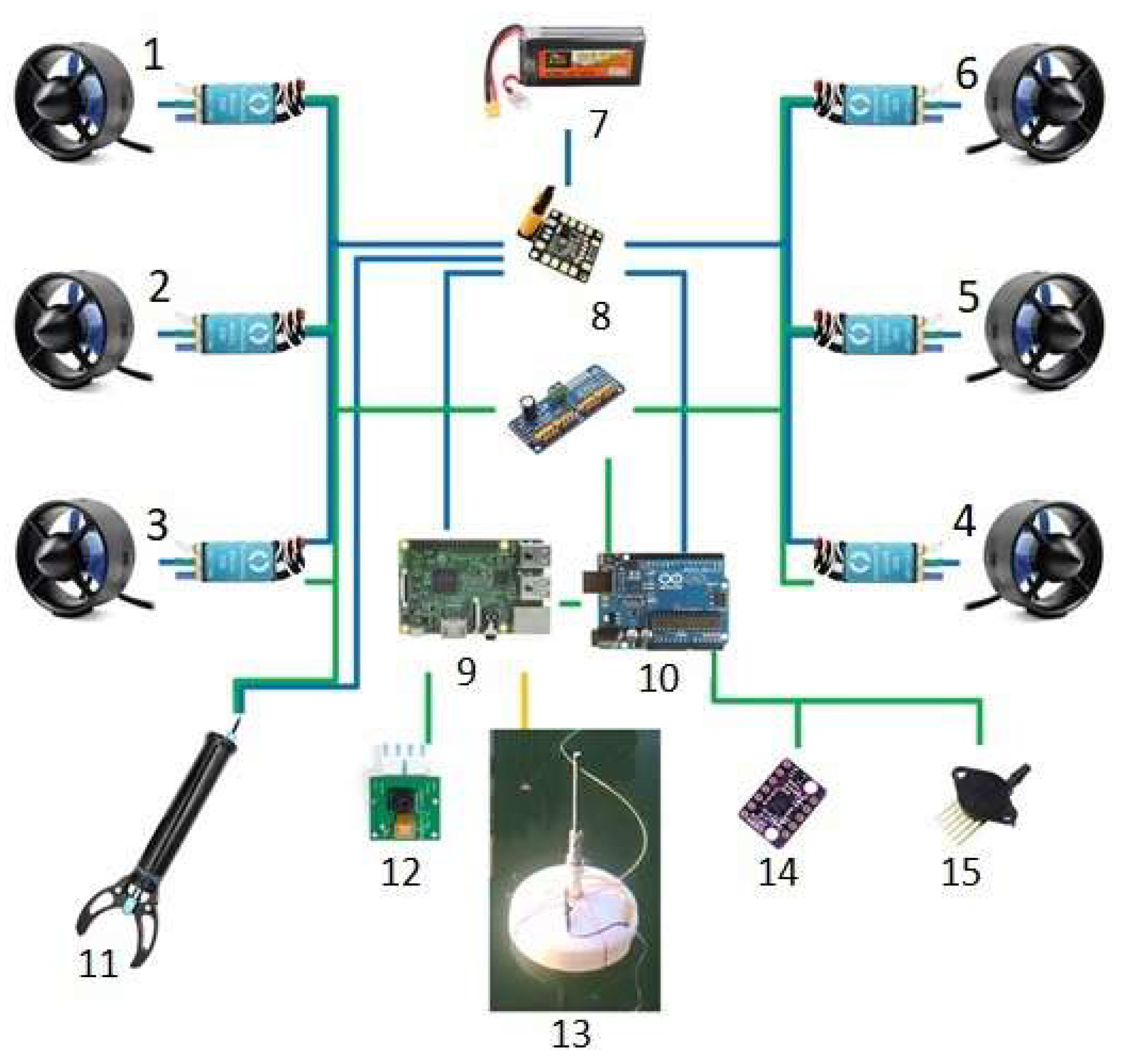
1.2. An Automated System for Remote Monitoring of Underwater Pipeline as an Example of k-out-of-n:F System
- power supply for all equipment;
- scanning the bottom topography using the hydroecholocation system;
- global positioning receiver GNSS-H;
- local underwater positioning system (PS);
- wire communication via cable (CC) on an electric winch;
- wireless communication of the module via radio channel with the base station (BS) with Directional antenna, Network hardware;
- receiving and processing control commands.
- Continuous. The underwater vehicle dives at the starting point. The SV begins to continuously move along the survey vector, scanning the bottom relief and the gas pipeline, while the UUV is simultaneously sailing behind it and filming the situation. Having reached the endpoint, the UUV ascends.
- Localized. The SV stops at a given fix. The UUV begins to sequentially dive, survey the surroundings, and ascend. Then the SV continues to move to the next checkpoint.
1.3. Literature Review
2. The Problem Set and Notations
2.1. The Notations and Assumptions
- in the very beginning the system is absolutely reliable, i.e. it is in zero state ;
- all sequences of r.v.’s (components lifetimes, repair, and PM times) are i.i.d. for each type of r.v.’s;
- after any repair and PM completion the system becomes “as a new one”, i.e., goes to the zero state1.
2.2. The Problem Set
- the system reliability function
- distributions of time before starting different maintenance and their mean values
- the system availability for different PM strategies .
3. Process J and the General Procedure of the PM Quality Calculation
3.1. Process
3.2. The General Procedure of the PM Quality Calculation
4. Homogeneous System Preventive Maintenance
4.1. Preliminary
4.2. Numerical Results
- Strategy 0 is that the system operates up to its failure.
- Strategy l ( 1, 2, 3) is to begin the PM when the system occurs in the state l.
| Algorithm 1: General algorithm to choose a PM strategy |
|
4.3. Special Case: Exponential Distribution of Components Lifetime
5. Preventive Maintenance of a System, Where Failures Depend on the Location of the Failed Components
5.1. Preliminary
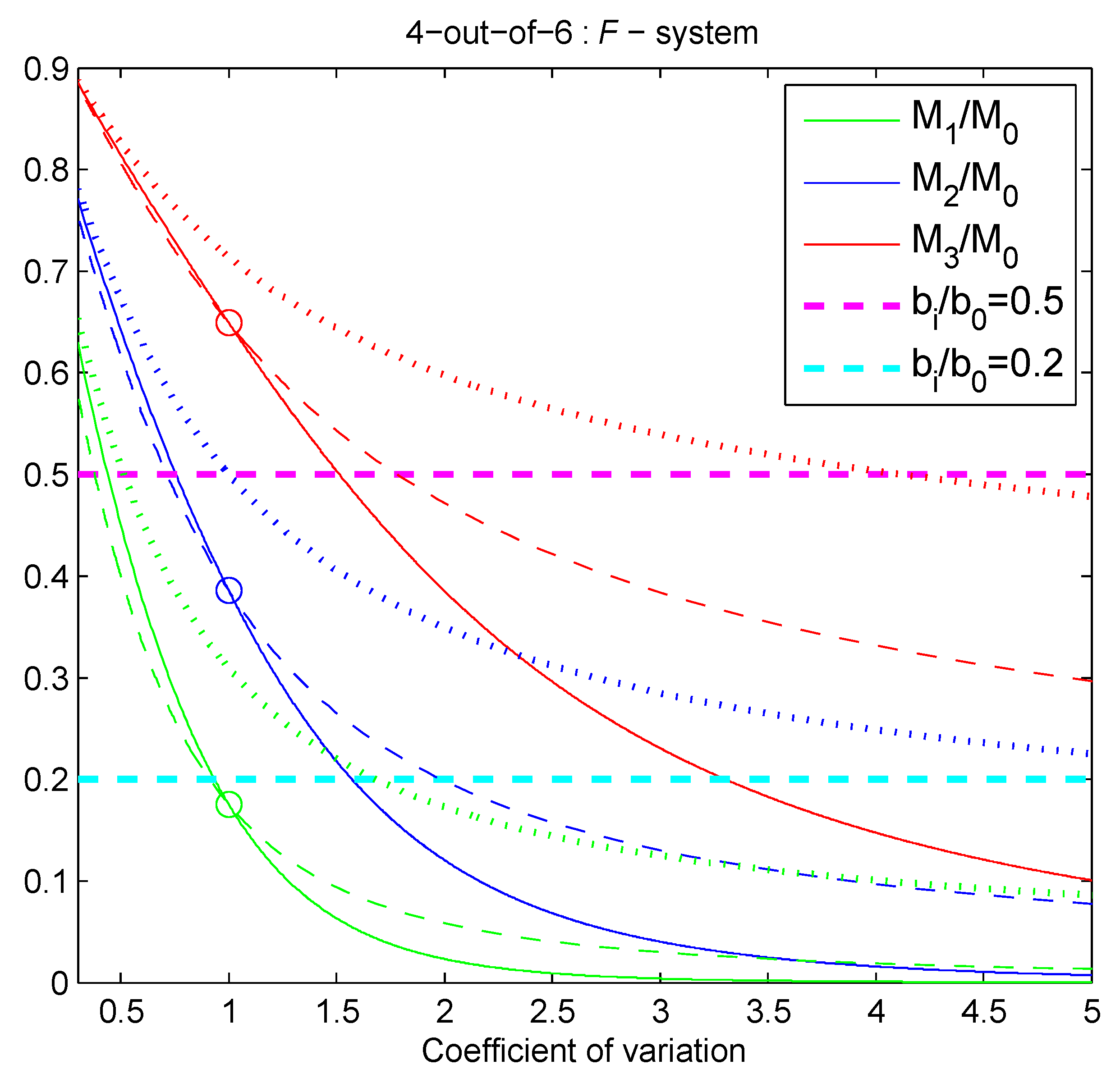
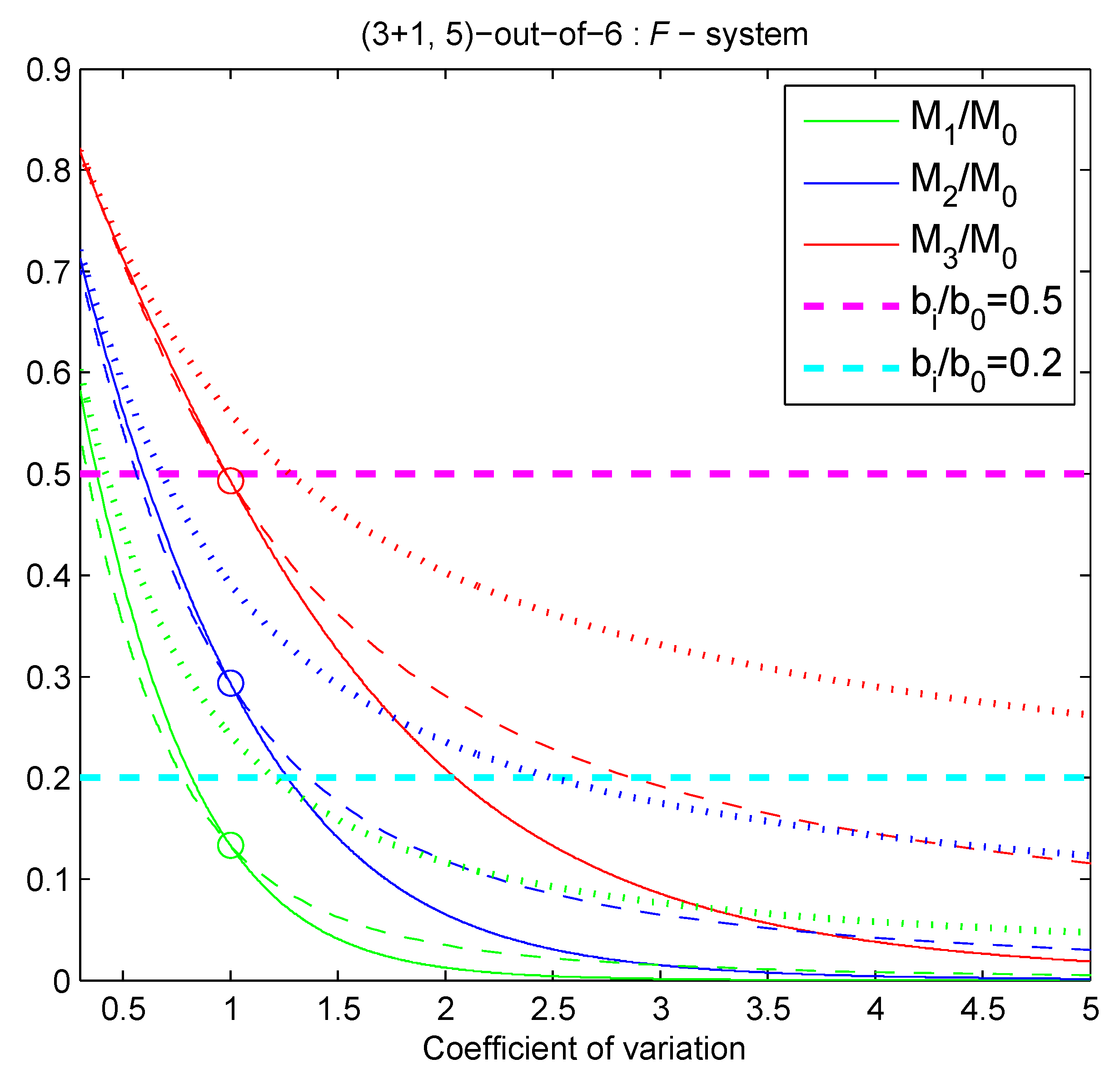
5.2. Example: Model -out-of-
- Strategy 0 is to run to the system failure (do not use any PM). It means that the repair begins when 4 failures occur at that 3 of them on one side and one on the other or 5 failures occur. The subset of the states for the repair beginning is .
- Strategy is to begin the PM after the failure of any l components.
5.3. Numerical Analysis
| Algorithm 2:The choice of a PM strategy for a heterogeneous system |
|
5.4. Special Case
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PM | Preventive Maintenance |
| UUV | Unmanned Underwater Vehicle |
| SV | Surface Vessel |
| i.i.d. | independent and identically distributed |
| r.v. | random value |
References
- Rykov, V.V.; Sukharev, M.G.; Itkin, V.Y. Investigations of k-out-of-n systems application possibilities to objects of oil and gas industry. Mar. Sci. Eng. 2020, 8, 928. [Google Scholar] [CrossRef]
- Shepherd, D.K. k-out-of-n Systems. In Encyclopedia of Statistics in Quality and Reliability; American Cancer Society: Atlanta, GA, USA, 2008; Available online: https://onlinelibrary.wiley.com/doi/pdf/10.1002/9780470061572.eqr342 (accessed on 26 February 2019).
- Gazprom. Dzhubga—Lazarevskoye—Sochi. The First Russia-Based Offshore Gas Pipeline. Available online: https://www.gazprom.com/projects/dls/ (accessed on 19 November 2020).
- OceanAlpha Group Ltd. Autonomous Hydrographic Survey Boat. Available online: https://www.oceanalpha.com/product-item/m40/ (accessed on 19 November 2020).
- Blue Robotics. BlueROV2. Available online: https://bluerobotics.com/product-category/rov/bluerov2/ (accessed on 19 November 2020).
- Farkhadov, M.; Abramenkov, A.; Abdulov, A.; Eliseev, A. Portable Remotely Operated Underwater Smart Vehicle with a Camera and an Arm. In Proceedings of the 2019 10th International Power Electronics Drive Systems and Technologies Conference (PEDSTC), Shiraz, Iran, 12–14 February 2019; pp. 178–183. [Google Scholar] [CrossRef]
- Advanced Research Foundation. AquaRoboTech 2020 Competition. Available online: http://aquarobotech.ru/about (accessed on 19 November 2020).
- Abdulov, A.; Abramenkov, A. Visual odometry system simulator. In Proceedings of the 2017 International Siberian Conference on Control and Communications (SIBCON), Astana, Kazakhstan, 29–30 June 2017; pp. 1–5. [Google Scholar]
- Gertsbakh, I. Preventive Maintenance Models Based on the Lifetime Distribution. In Reliability Theory with Applications to Preventive Maintenance; Springer: Berlin/Heidelberg, Germany, 2000; pp. 67–106. [Google Scholar]
- Dudin, A.N.; Krishnamoorthy, A.; Narayanan, V.C. Idle time utilization through service to customers in a retrial queue maintaining high system reliability. J. Math. Sci. 2013, 191, 506–517. [Google Scholar] [CrossRef]
- Krishnamoorthy, A.; Viswanath, C.N.; Deepak, T.G. Reliability of a k-out-of-n-system with Repair by a Service Station Attending a Queue with Postponed Work. Int. J. Reliab. Qual. Saf. Eng. 2007, 14, 379–398. [Google Scholar] [CrossRef]
- Krishnamoorthy, A.; Viswanath, C.N.; Deepak, T.G. Maximizing of Reliability of a k-out-of-n-system with Repair by a facility attending external customers in a Retrial Queue. Reliab. Theory Appl. 2007, 2, 21–33. [Google Scholar]
- Krishnamoorthy, A.; Sathian, M.K.; Viswanath, C.N. Reliability of a k-out-of-n system with repair by a single server extending service external customers with pre-emption. Reliab. Theory Appl. 2016, 11, 61–93. [Google Scholar]
- Krishnamoorthy, A.; Sathian, M.K.; Viswanath, C.N. Reliability of a k-out-of-n system with a single server extending non-preemptive service to external customers- Part I. Reliab. Theory Appl. 2016, 11, 62–75. [Google Scholar]
- Krishnamoorthy, A.; Sathian, M.K.; Viswanath, C.N. Reliability of a k-out-of-n system with a single server extending non-preemptive service to external customers-Part II. Reliab. Theory Appl. 2016, 11, 76–88. [Google Scholar]
- Finkelstein, M.; Levitin, G. Preventive maintenance for homogeneous and heterogeneous systems. Appl. Stoch. Model. Bus. Ind. 2019, 35, 908–920. [Google Scholar] [CrossRef]
- Finkelstein, M.; Cha, J.H.; Levitin, G. On a new age-replacement policy for items with observed stochastic degradation. Qual. Reliab. Eng. Int. 2020, 36, 1132–1146. [Google Scholar] [CrossRef]
- Park, M.; Lee, J.; Kim, S. An optimal maintenance policy for k-out-of-n system without monitoring component. Qual. Technol. Qual. Manag. 2019, 16, 140–153. [Google Scholar] [CrossRef]
- Endharth, A.J.; Yun, W.Y.; Yamomoto, H. Preventive maintenance policy for linear-consequtive -k-out-of-n:F system. J. Oper. Res. Soc. Jpn. 2016, 59, 334–346. [Google Scholar]
- Hamdan, K.; Tavangar, M.; Asadi, M. Optimal preventive maintenance for repairable weighted k-out-of-n systems. Reliab. Eng. Syst. Safe 2021, 205, 107267. [Google Scholar] [CrossRef]
- Kozyrev, D.; Kolev, N.; Rykov, V. Reliability function of renewable system under marshall-lkin Failure Model. Reliab. Theory Appl. 2018, 13, 39–46. [Google Scholar]
- Rykov, V. On Reliability of Renewable Systems. In Reliability Engineering. Theory and Applications; Vonta, I., Ram, M., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 173–196. [Google Scholar]
- Rykov, V.; Kozyrev, D. On the reliability function of a double redundant system with general repair time distribution. Appl. Stoch. Model. Bus. Ind. 2019, 35, 191–197. [Google Scholar] [CrossRef]
- Rykov, V.; Kozyrev, D.; Filimonov, A.; Ivanova, N. On reliability function of a k-out-of-n system with general repair time distribution. Probab. Eng. Inf. Sci. 2020, 5, 1–18. [Google Scholar] [CrossRef]
| 1. | The assumption that the system returns to its original state is simplifying, it does not fully correspond to the real situation, however, most studies of real systems are based on this assumption. |
| 2. | Another quality criteria also possible, such as productivity of the system and/or system service cost under different maintenance strategies etc. |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distribution | ||||||
|---|---|---|---|---|---|---|
| - distribution | 0.44 | 0.76 | 1.51 | 0.93 | 1.57 | 3.30 |
| -distribution | 0.38 | 0.71 | 1.76 | 0.91 | 1.96 | |
| Log-normal distribution | 0.51 | 0.99 | 4.08 | 1.66 | ||
| Distribution | ||
|---|---|---|
| -distribution | 1.275 | 2.749 |
| -distribution | 1.427 | >5 |
| Log-normal distribution | 3.771 | >5 |
| Distribution | ||||||
|---|---|---|---|---|---|---|
| -distribution | 0.37 | 0.6 | 0.98 | 0.82 | 1.26 | 2.05 |
| -distribution | 0.34 | 0.56 | 0.98 | 0.78 | 1.36 | 2.85 |
| Log-normal distribution | 0.42 | 0.68 | 1.27 | 1.2 | 2.49 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rykov, V.; Kochueva, O.; Farkhadov, M. Preventive Maintenance of a k-out-of-n System with Applications in Subsea Pipeline Monitoring. J. Mar. Sci. Eng. 2021, 9, 85. https://doi.org/10.3390/jmse9010085
Rykov V, Kochueva O, Farkhadov M. Preventive Maintenance of a k-out-of-n System with Applications in Subsea Pipeline Monitoring. Journal of Marine Science and Engineering. 2021; 9(1):85. https://doi.org/10.3390/jmse9010085
Chicago/Turabian StyleRykov, Vladimir, Olga Kochueva, and Mais Farkhadov. 2021. "Preventive Maintenance of a k-out-of-n System with Applications in Subsea Pipeline Monitoring" Journal of Marine Science and Engineering 9, no. 1: 85. https://doi.org/10.3390/jmse9010085
APA StyleRykov, V., Kochueva, O., & Farkhadov, M. (2021). Preventive Maintenance of a k-out-of-n System with Applications in Subsea Pipeline Monitoring. Journal of Marine Science and Engineering, 9(1), 85. https://doi.org/10.3390/jmse9010085