
Mathematical Modelling of Bonded Marine Hoses for Single Point Mooring (SPM) Systems, with Catenary Anchor Leg Mooring (CALM) Buoy Application—A Review




Abstract
:1. Introduction
2. Single Point Mooring (SPM): An Overview
2.1. Categorisation of SPM Moorings
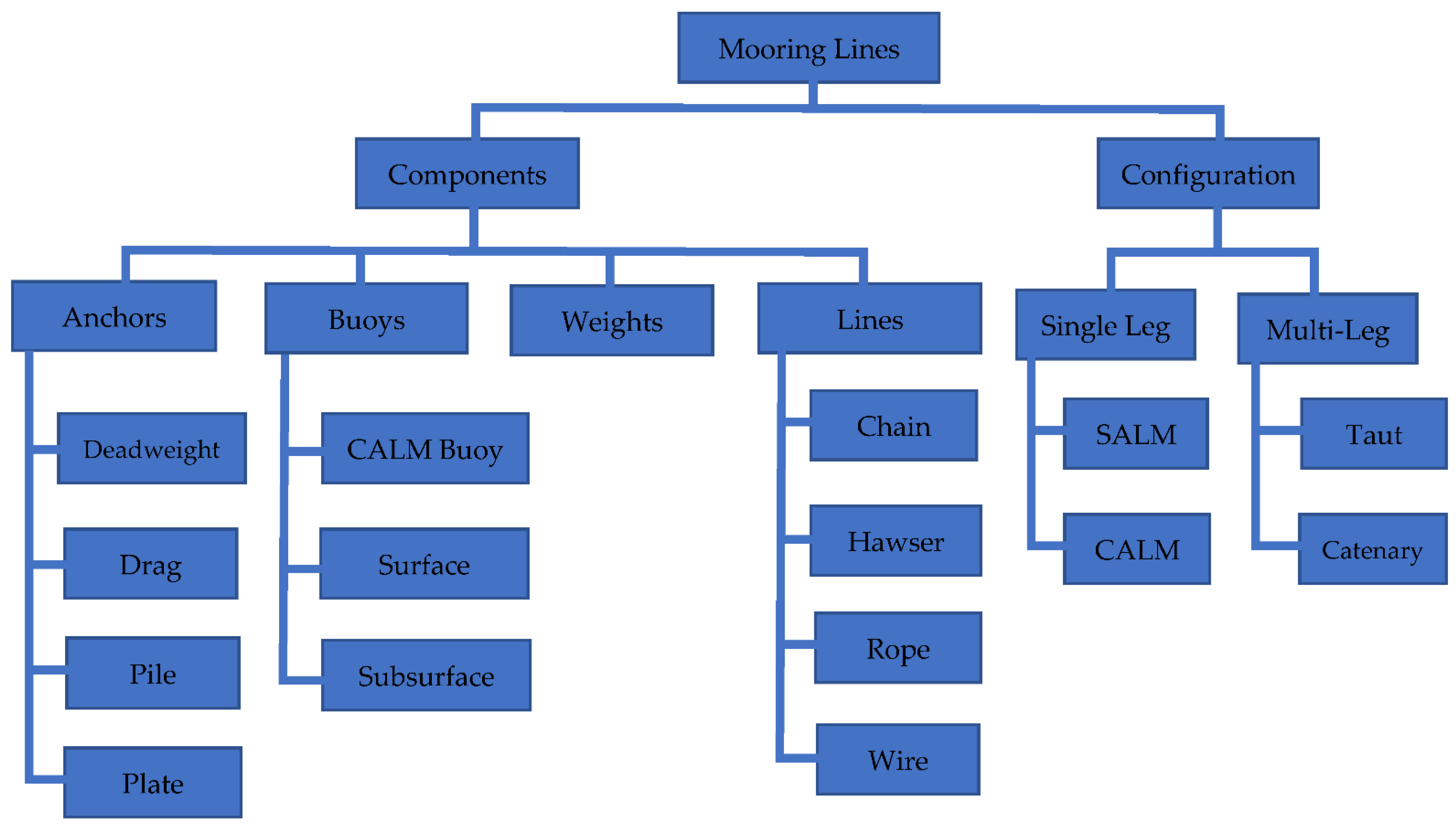
2.1.1. Components of SPM System
- The access to the buoy deck is provided by a boat landing;
- The buoy is protected by fenders;
- The material handling equipment includes lifting and handling equipment;
- Maritime visibility aids and a fog siren are used to keep moving vessels alert and attentive;
- The navigation aids or other equipment are powered by the electrical subsystem;
- The sources of power systems are batteries and solar systems. While the batteries are replenished on a regular basis, the solar power systems employ sun-sourced renewable energy and maintain the charge in the battery packs, for electrical power;
- A hydraulic system can be added for remote operation with PLEM valves, if needed.
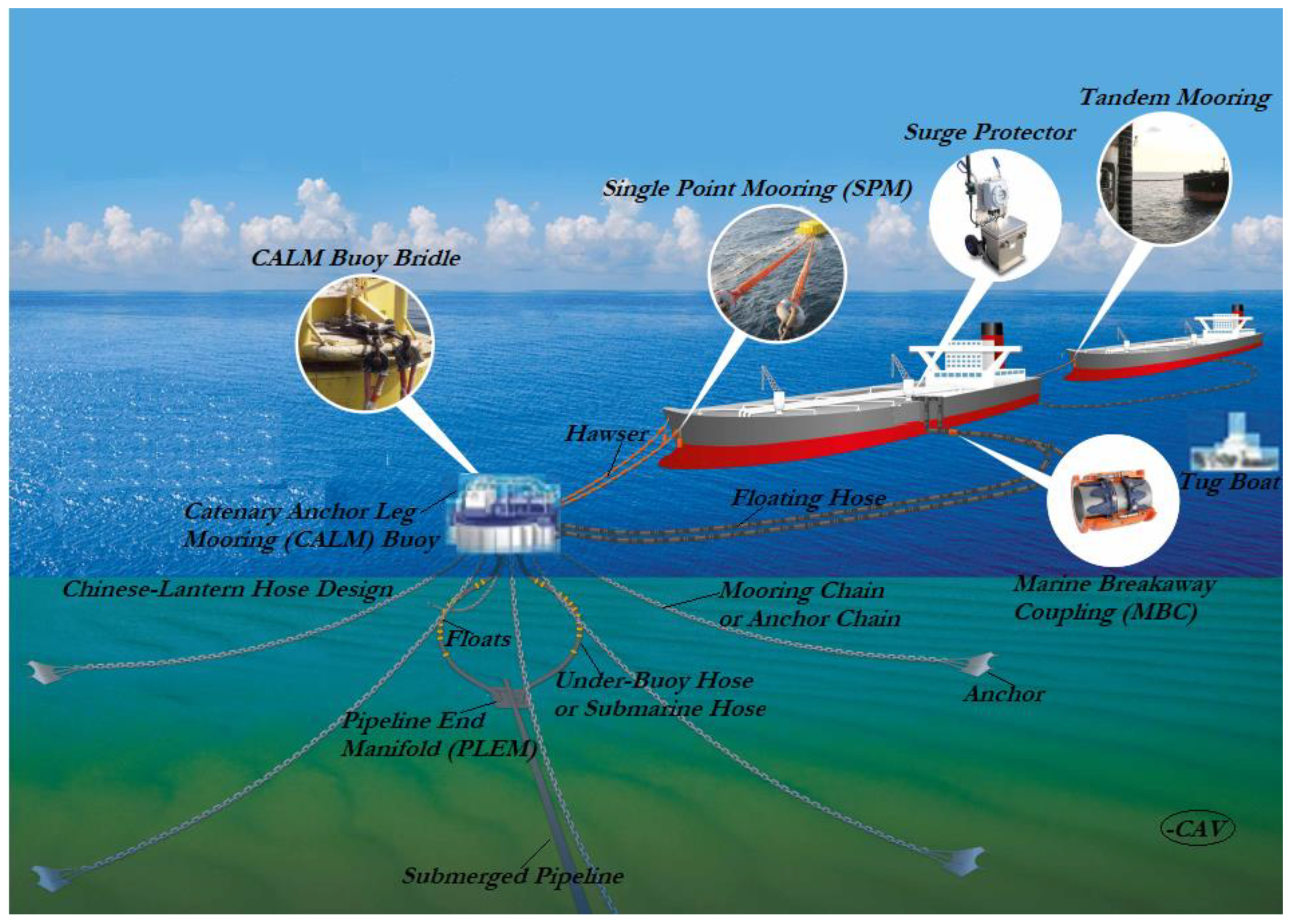
2.1.2. Components of CALM Buoy System
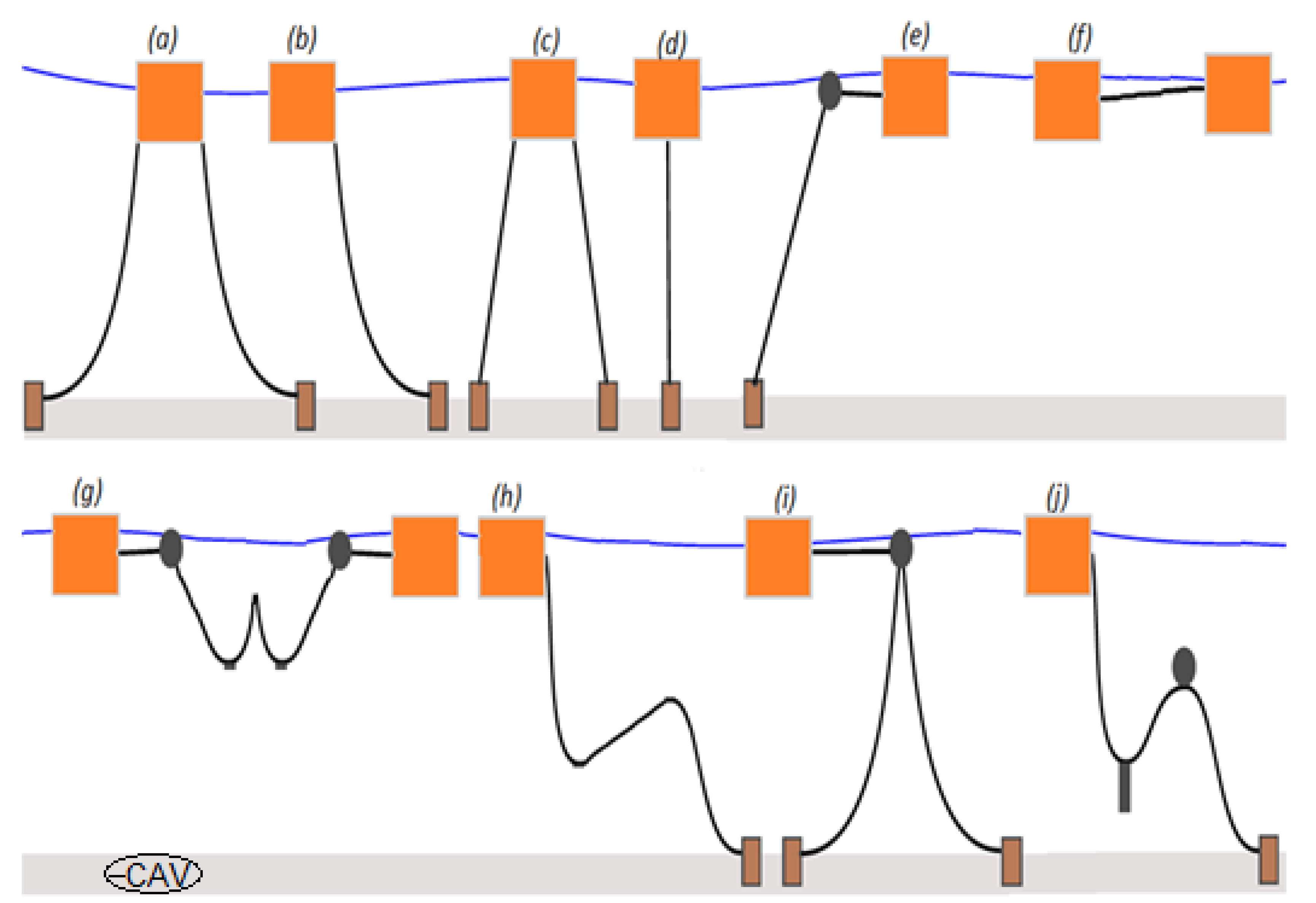
2.1.3. Different Mooring Configuration
2.2. Review on Physical Models on Hoses and SPMs
2.3. FPSOs for Marine Hose Operations
3. Model Methodologies and Software Tools
3.1. Uncoupled Methodology
- (1)
- The uncoupled approach does not normally account for mean current loads on moorings and risers, but in those scenarios, the interactive effects of current forces on the Submarine elements and the mean offset and LF motions of the floater are significant;
- (2)
- A significant damping effect of the moorings and risers on LF motions must be included in a simplified way, usually as linear damping forces. Because multiple characteristics are involved, creating simplified models of this event is difficult. It should be noted that this classification of “uncoupled techniques” could include a variety of analysis methodologies.
- (a)
- Uncoupled formulations utilized in the numerical tools deployed in the analysis of the floating structures, in which the vessel’s hydrodynamic response is unaffected by the lines’ nonlinear dynamic behavior;
- (b)
- The analytical technique takes into account the low or negligible integration for both the hose risers and mooring systems.
3.2. Coupled Methodology
3.3. Hybrid Coupled Methodology
3.3.1. Coupled Motion Analysis
3.3.2. Semi-Coupled (S-C) Motion Analysis
3.4. Software Packages
4. Mathematical Model and Other Model Types
4.1. Theory Formulation
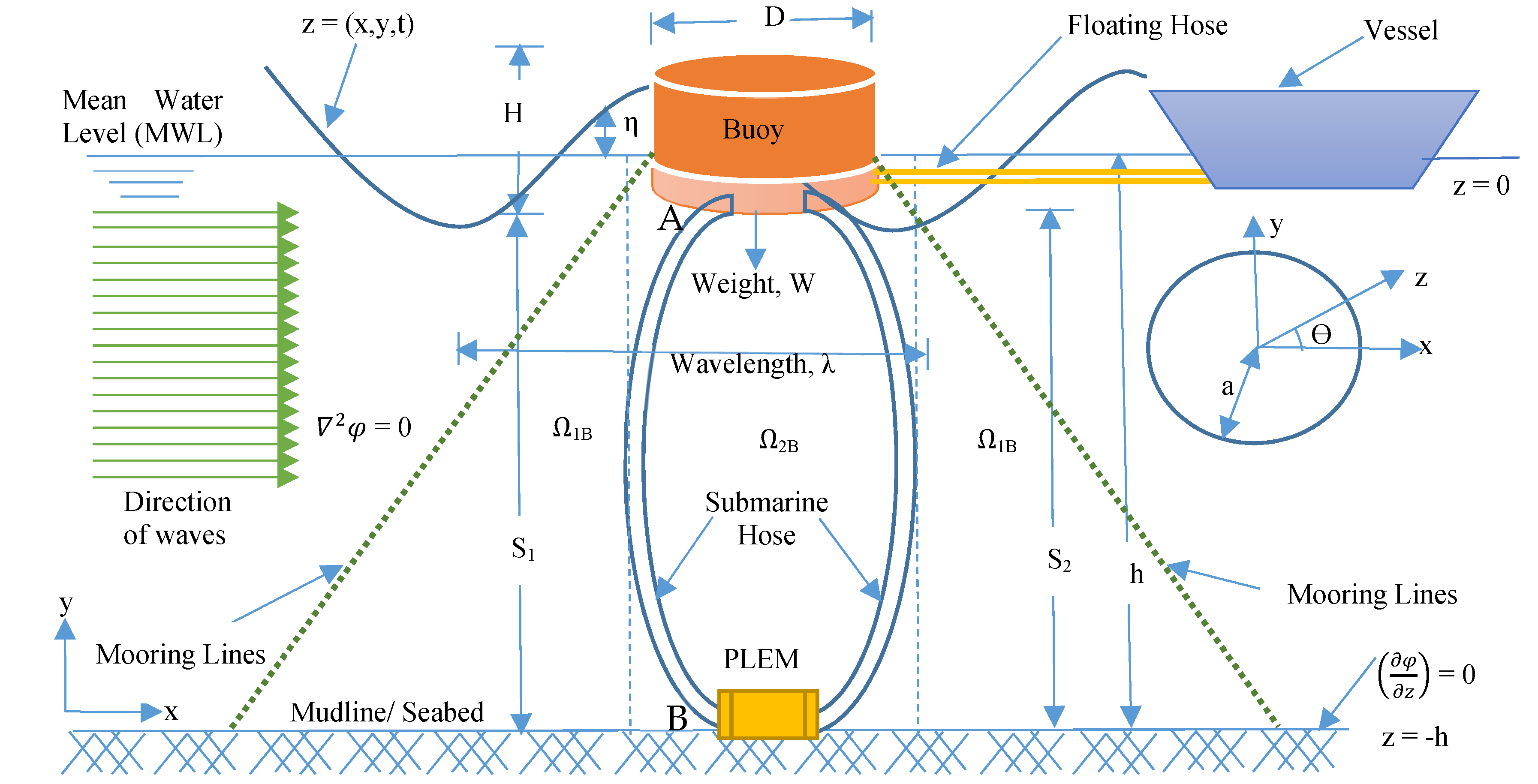
4.1.1. Mathematical Formulation of Hose Model
4.1.2. Assumptions
- The fluid is incompressible, irrotational, and bounded by the surface of the buoy, the rigid bottom and the free surface;
- The seabed is horizontal and on a rigid plane. For the diffraction analysis, the fluid motion is in a cylindrical coordinate system of form (r, θ, z);
- The submarine hose is considered as a beam undergoing pure bending;
- The internal and external forces will place longitudinal forces on the hose. However, the effects can be negligible at depths with small effects;
- The hose curvature is the inverse of the minimum bend radius (MBR), and the curvature calculation can be approximated using . The measurement of the bend radius of the hose is never less than the MBR;
- The influences of both the horizontal forces and the shear forces on the curvature are negligible, depending on the bending moment;
- Due to some nonlinearities within the hose geometry, there will be some nonlinearities in the motions of fluids within the hose;
- The hose is considered to possess a solidly rigid body with constant bending stiffness for all given cross-sections transverse to the axis of the hose. The hose also transports (or carries) fluid under high pressure, and the fluid can be oil or water;
- The hose can be made of different sections, flanges, reinforced ends, floated sections and unfloated sections, and can have different section radii. A uniform density of the hose is assumed for both the rubber and steel sections.
4.1.3. Boundary Condition Formulation
- (a)
- Dynamic boundary conditions:
- (b)
- Kinematic boundary conditions:
- (c)
- Free surface boundary conditions:
- (d)
- Body surface boundary conditions:
- (e)
- Seabed (or bottom) boundary conditions:
- (f)
- Radiation boundary conditions:
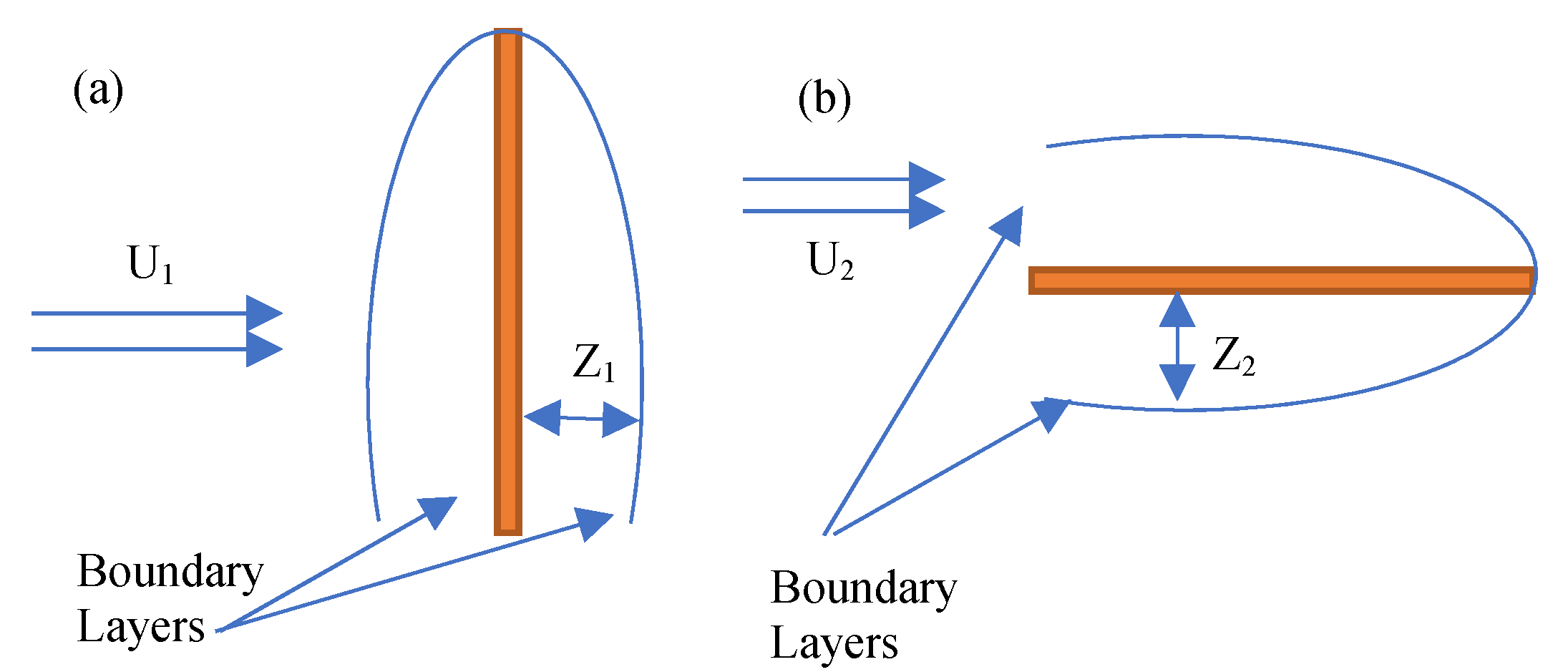
4.1.4. Boundary Layer
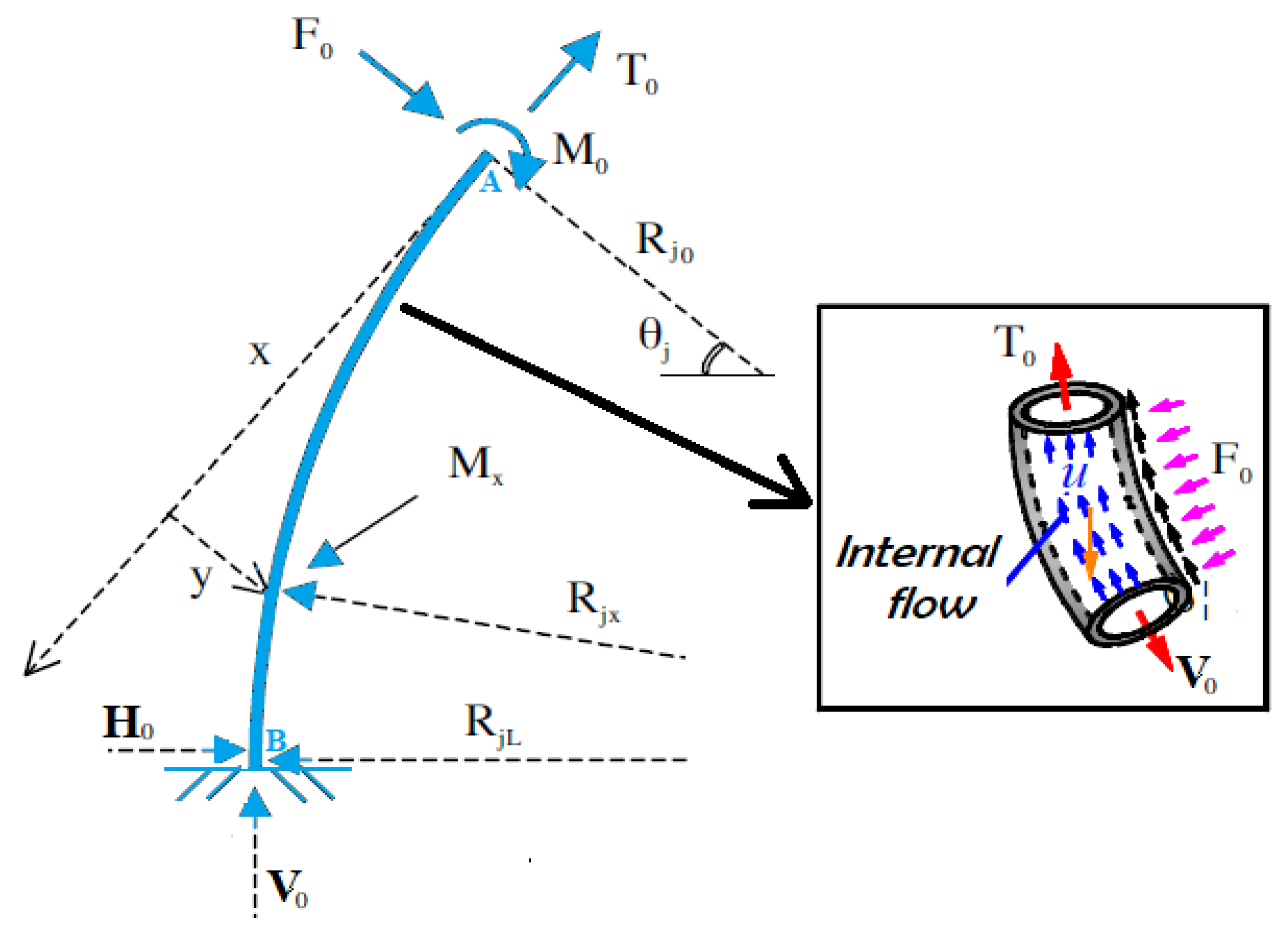
4.1.5. Modeling the Submarine Hose
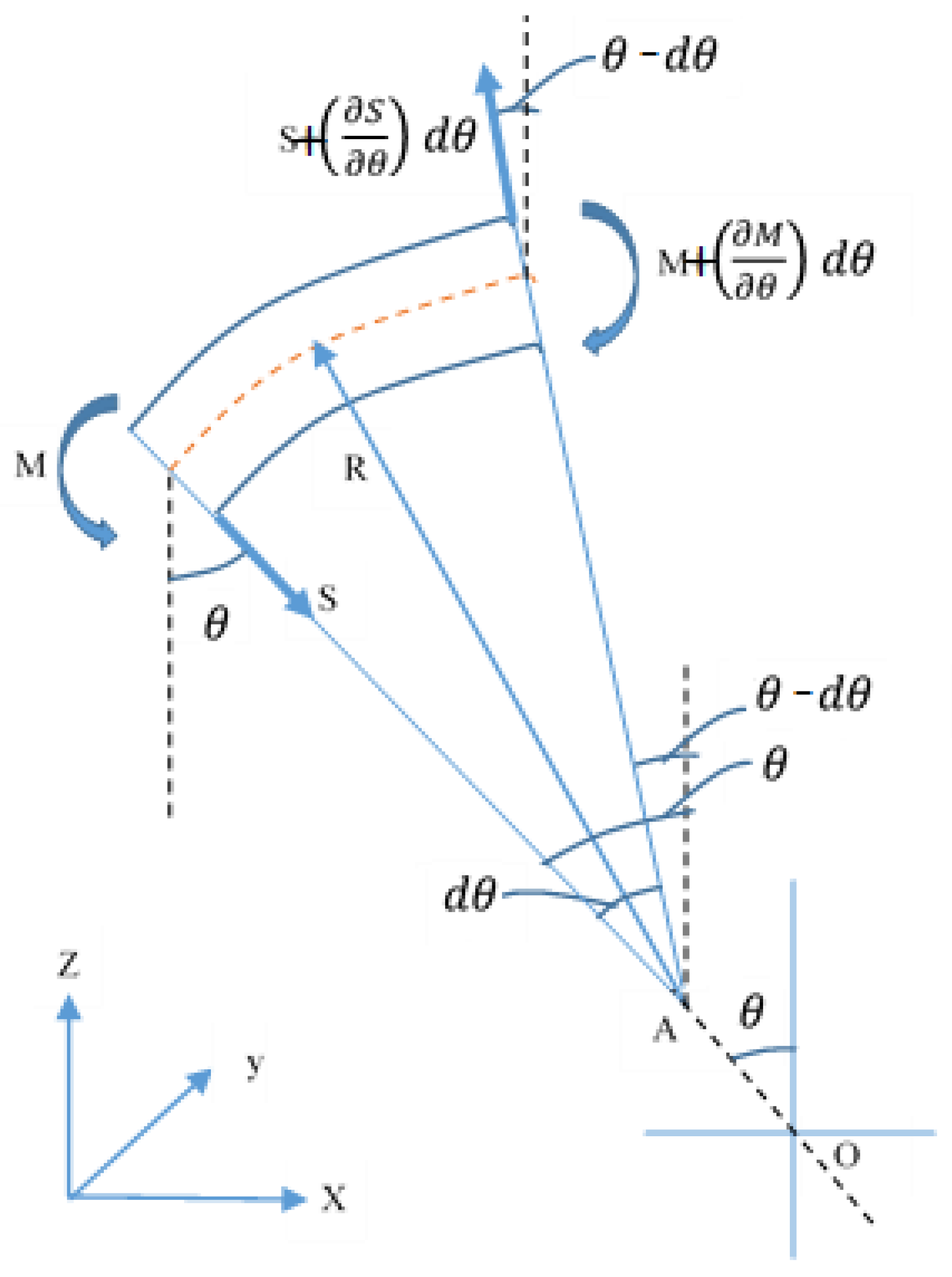
4.1.6. Governing Differential Equations
4.1.7. Hose Bending and Lateral Deflection
4.2. Hydrodynamic Model
4.2.1. Hydrodynamic Forces
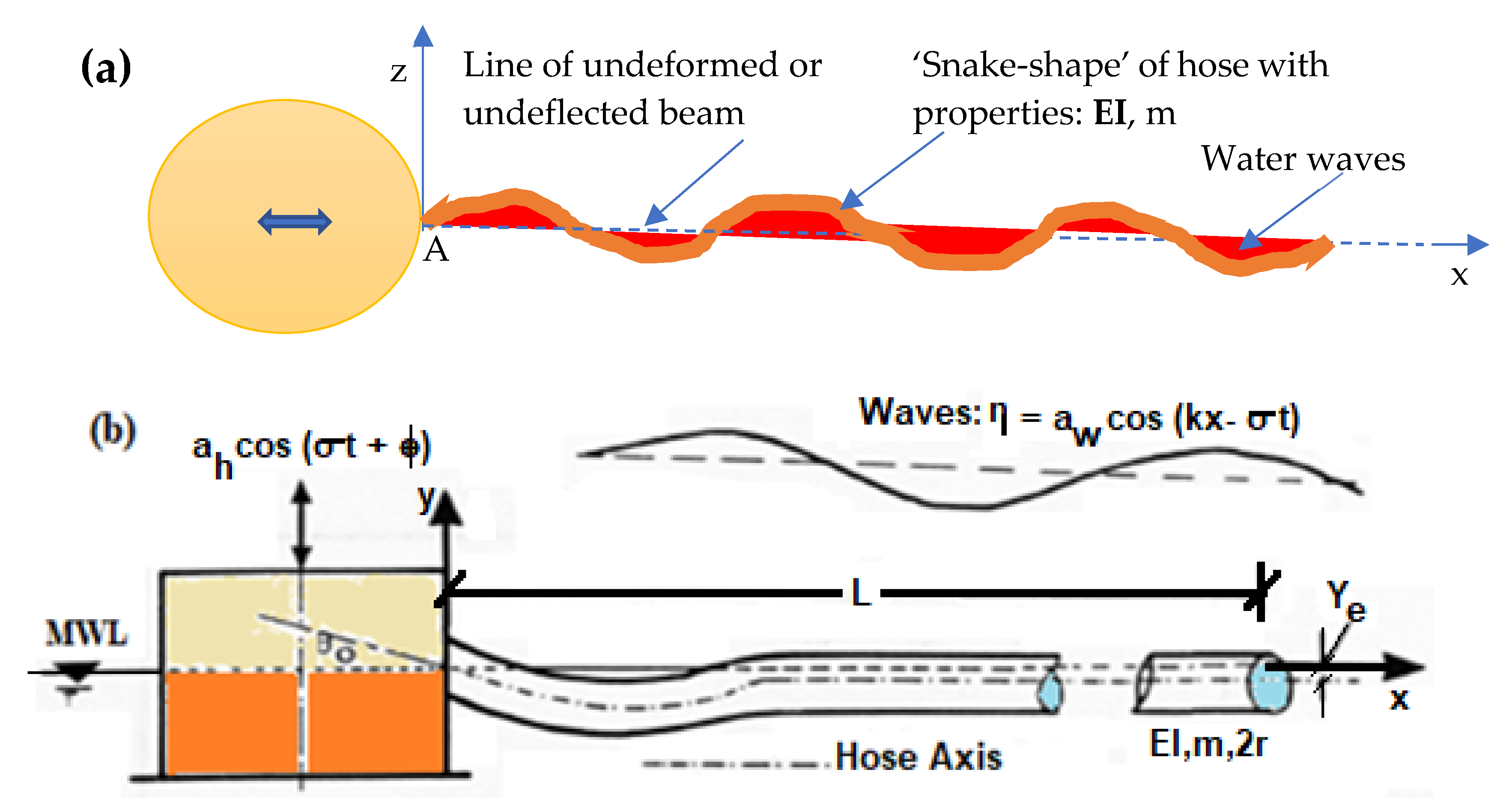
4.2.2. Snaking Model of Hose
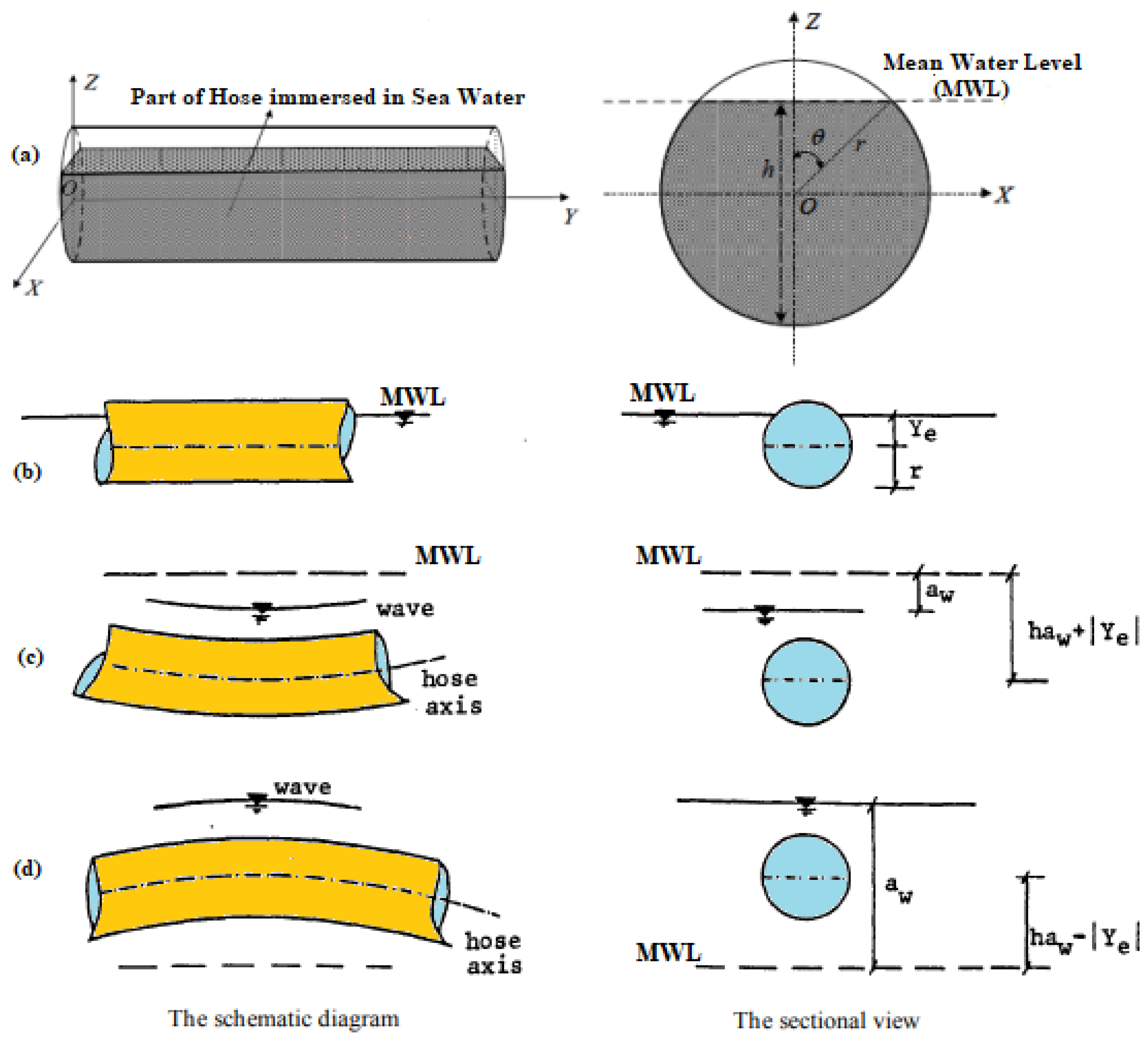
4.2.3. Buoyancy Force
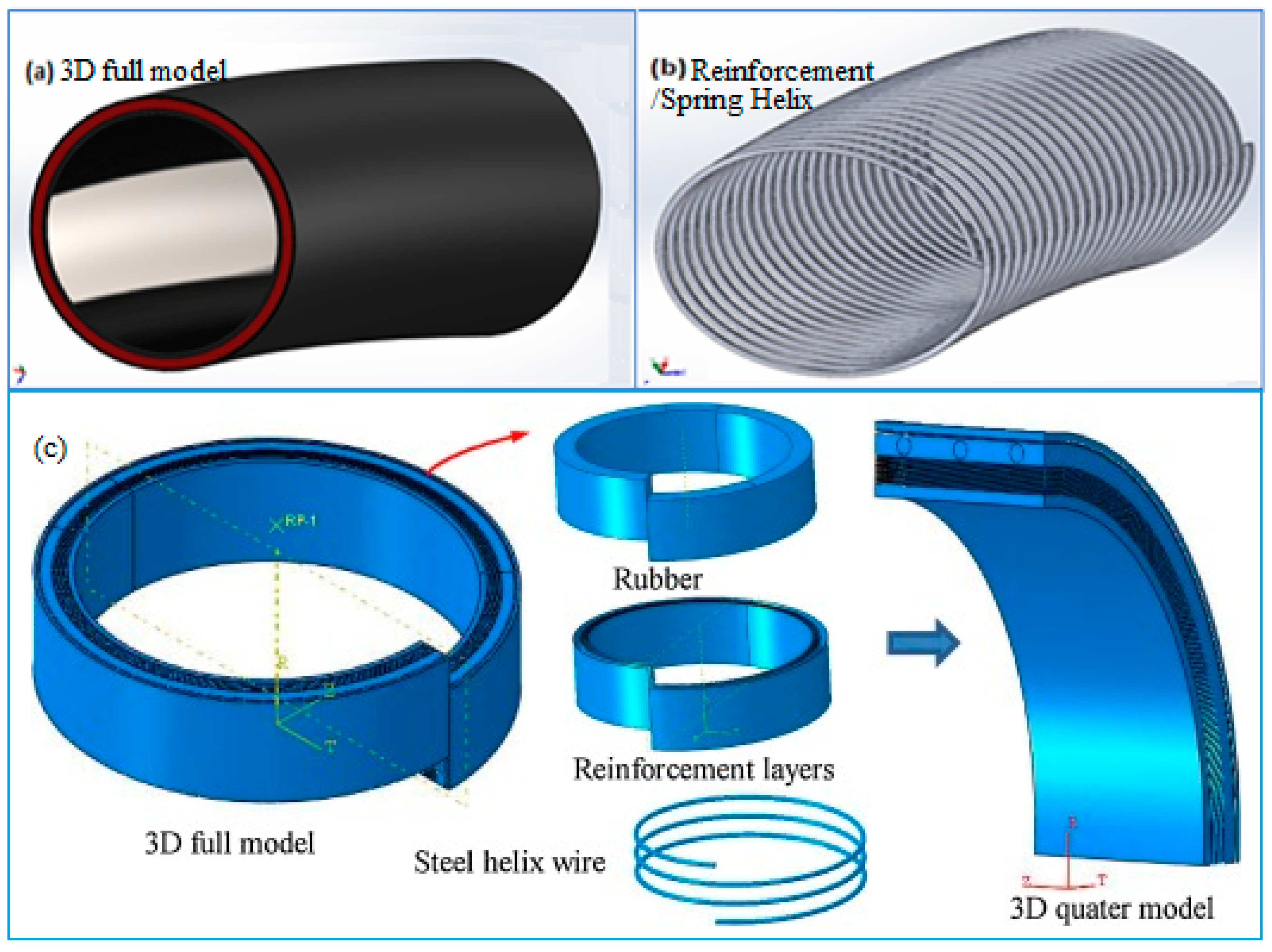
4.3. Hose Material Models
4.4. Hose Stability Models
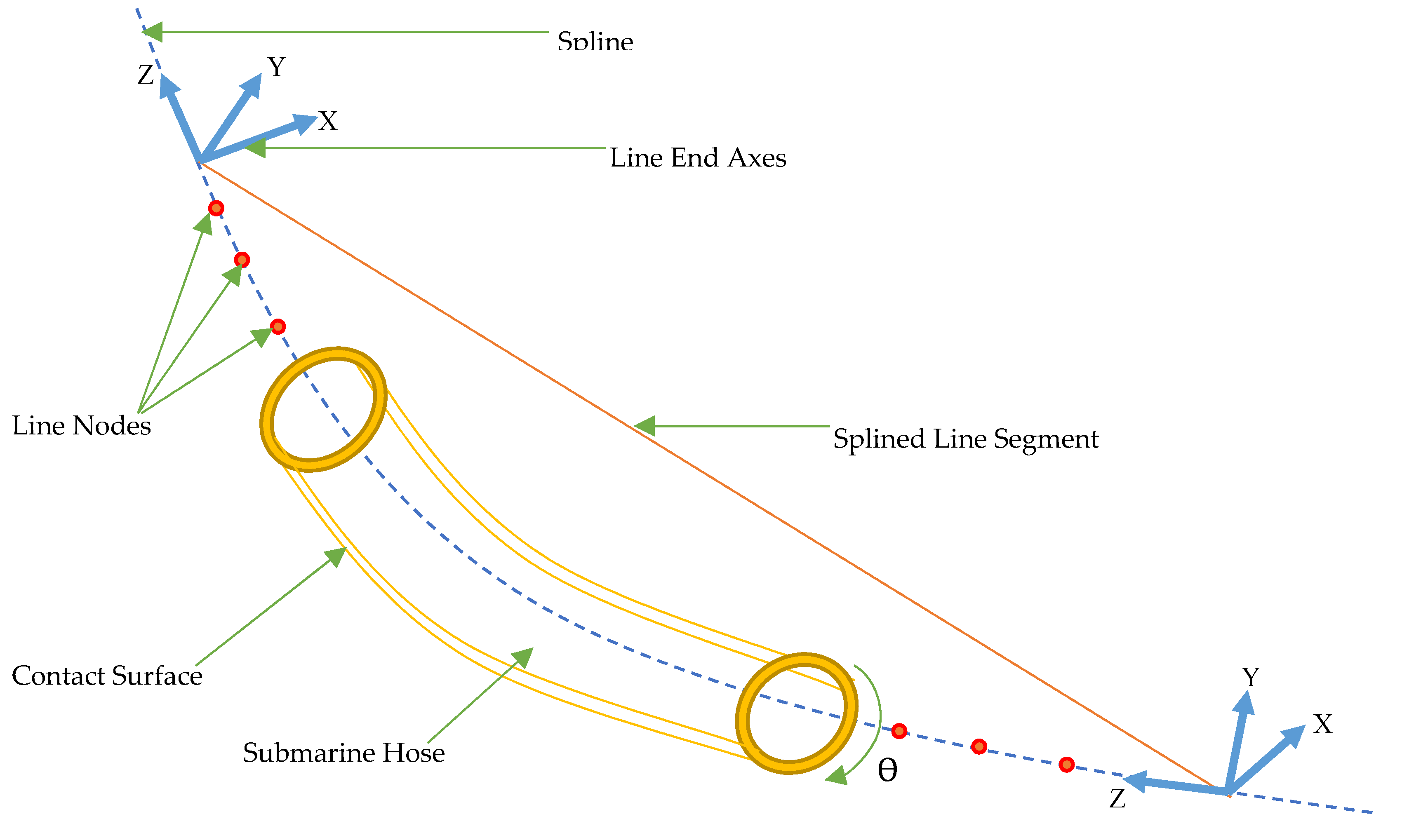
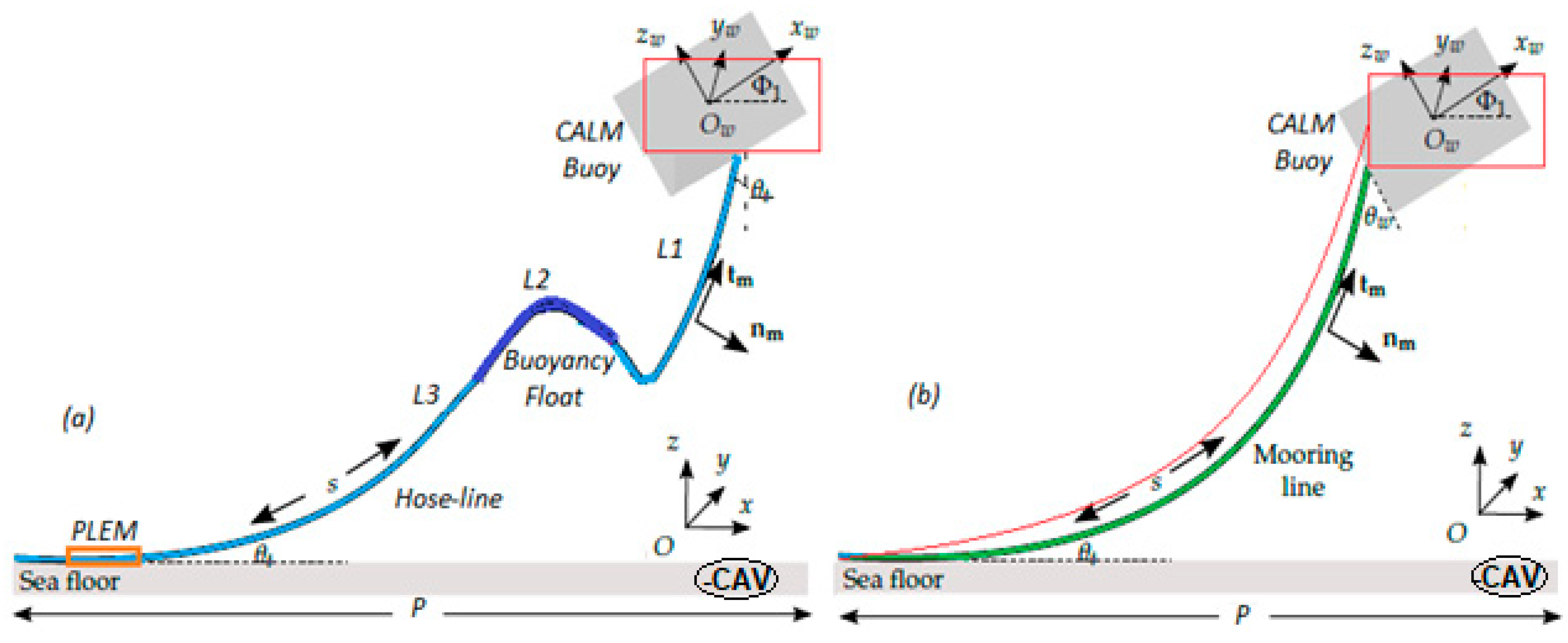
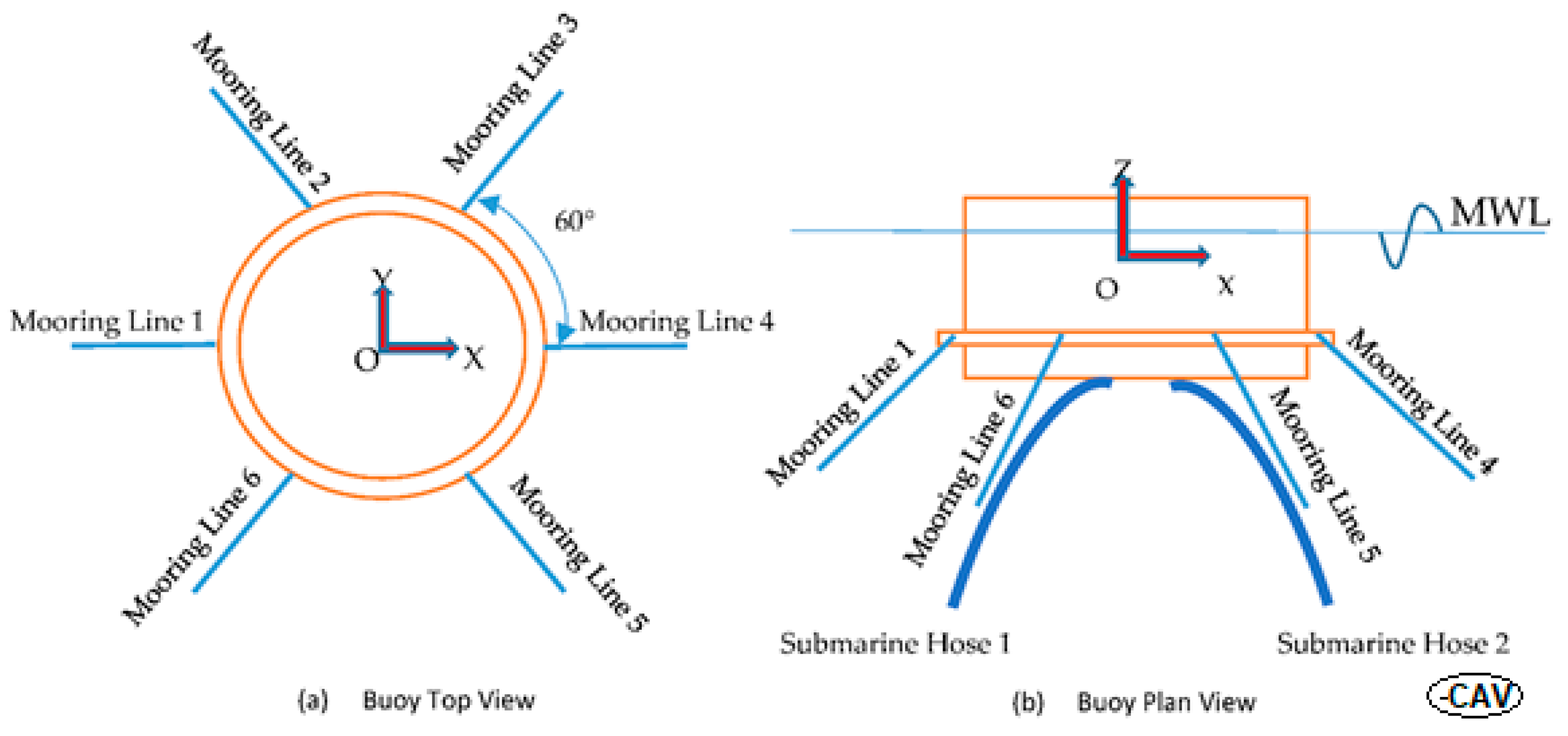
4.4.1. Hose Coordinate Systems
- (a)
- The global frame of reference (x, y, z);
- (b)
- The CALM buoy frame of reference (xw, yw, zw);
- (c)
- The curvilinear distance along the hose line, s, also used for moorings.
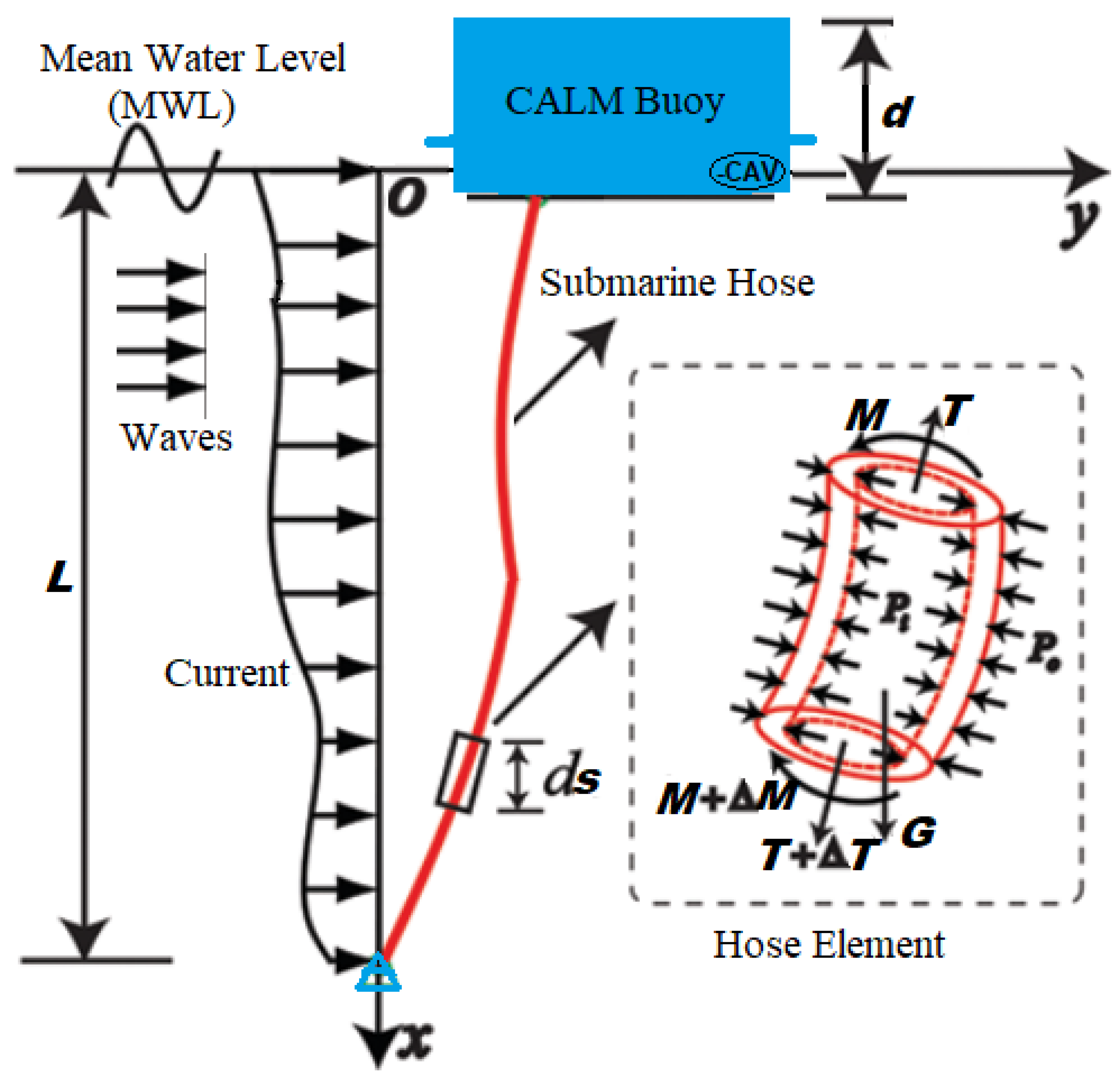
4.4.2. Environmental Conditions
4.4.3. Hose Slenderness Ratio
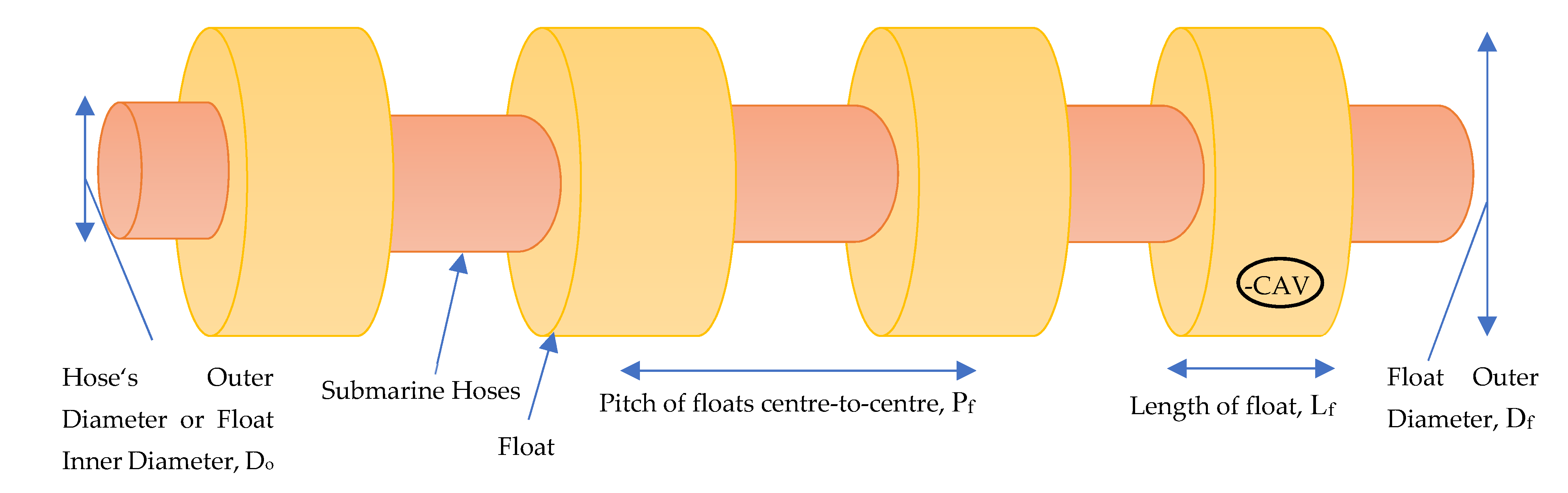
4.5. Hose Floats and Buoyancy Module Models
5. Governing Equations and Motion Characteristics
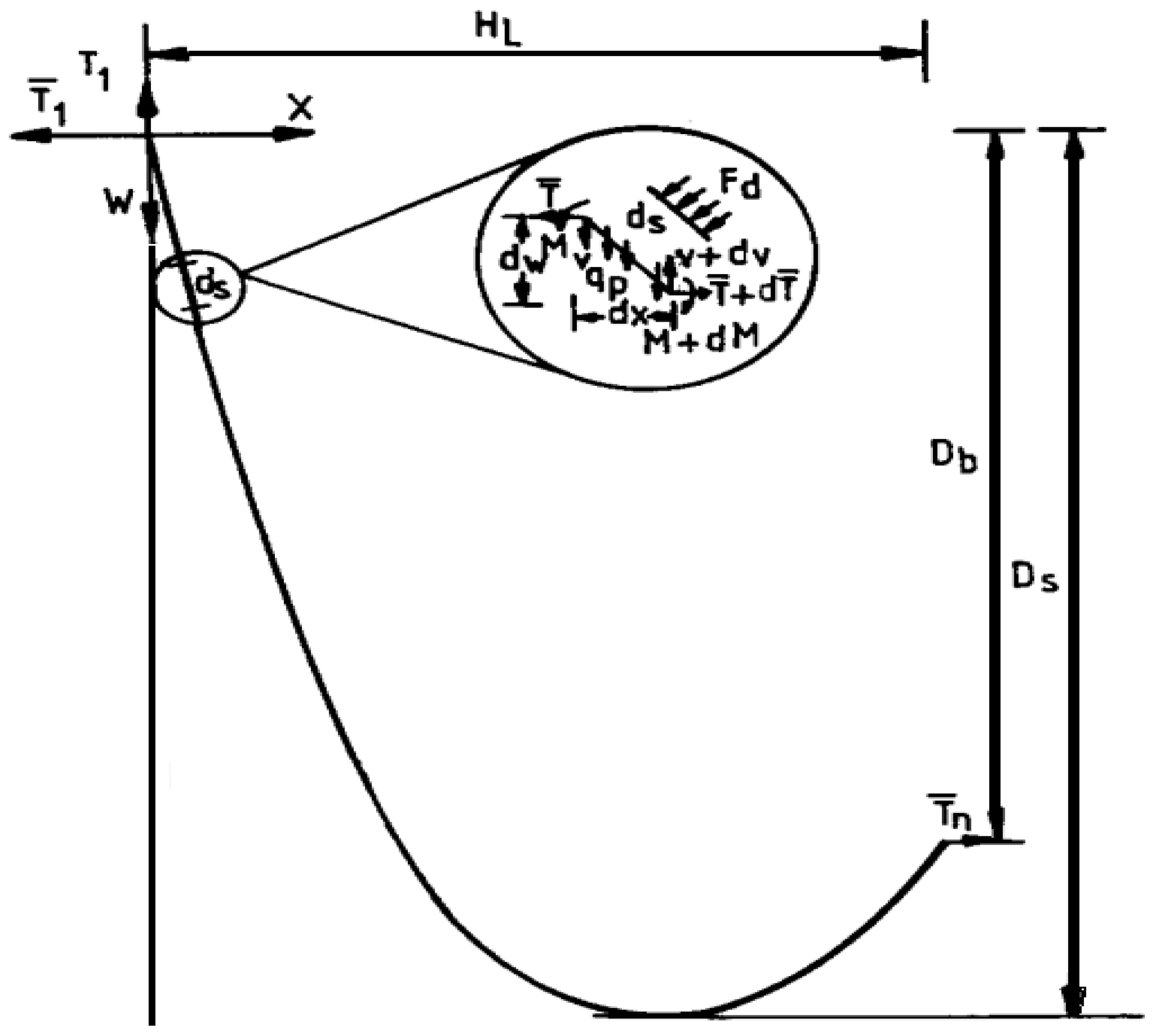
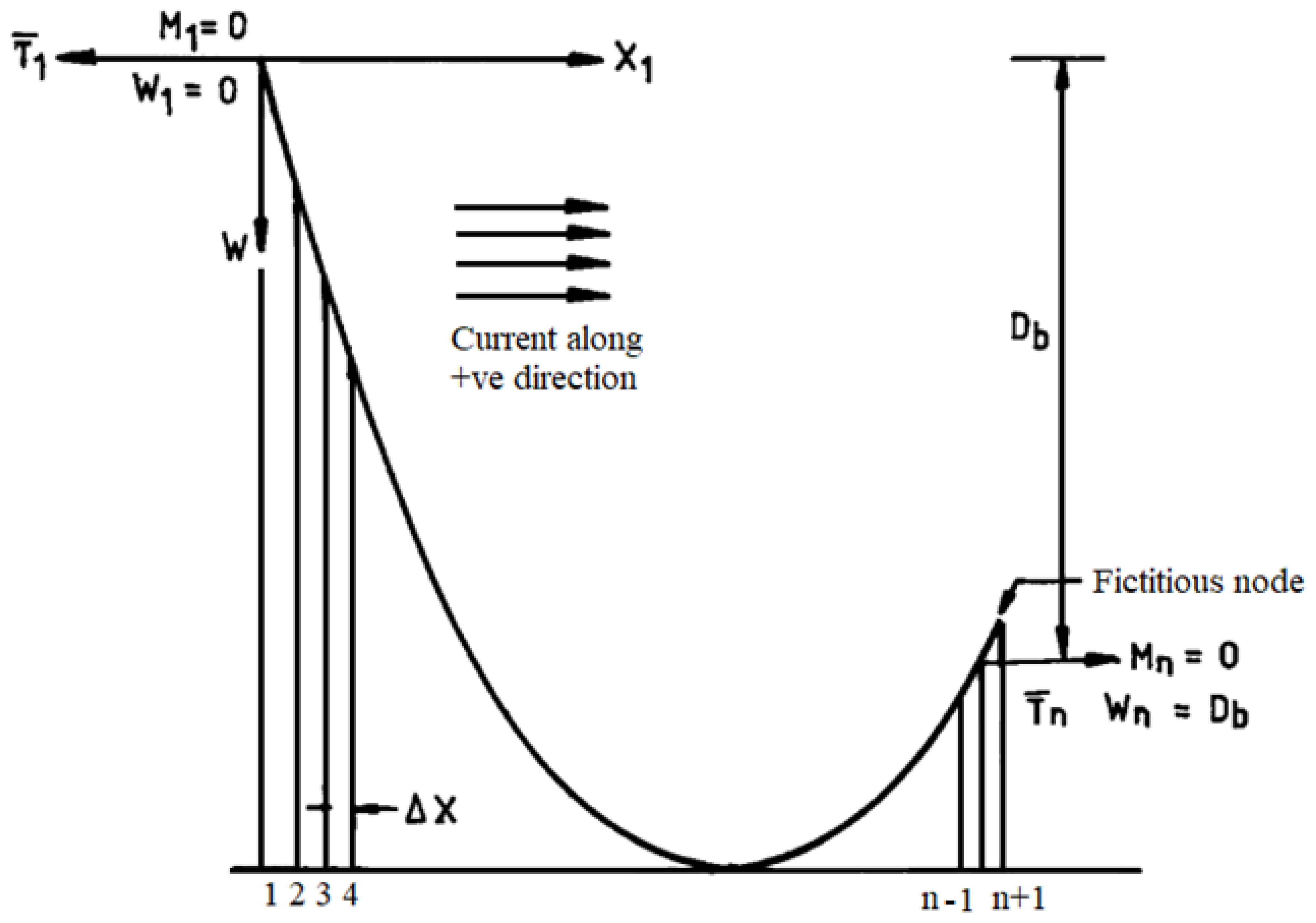
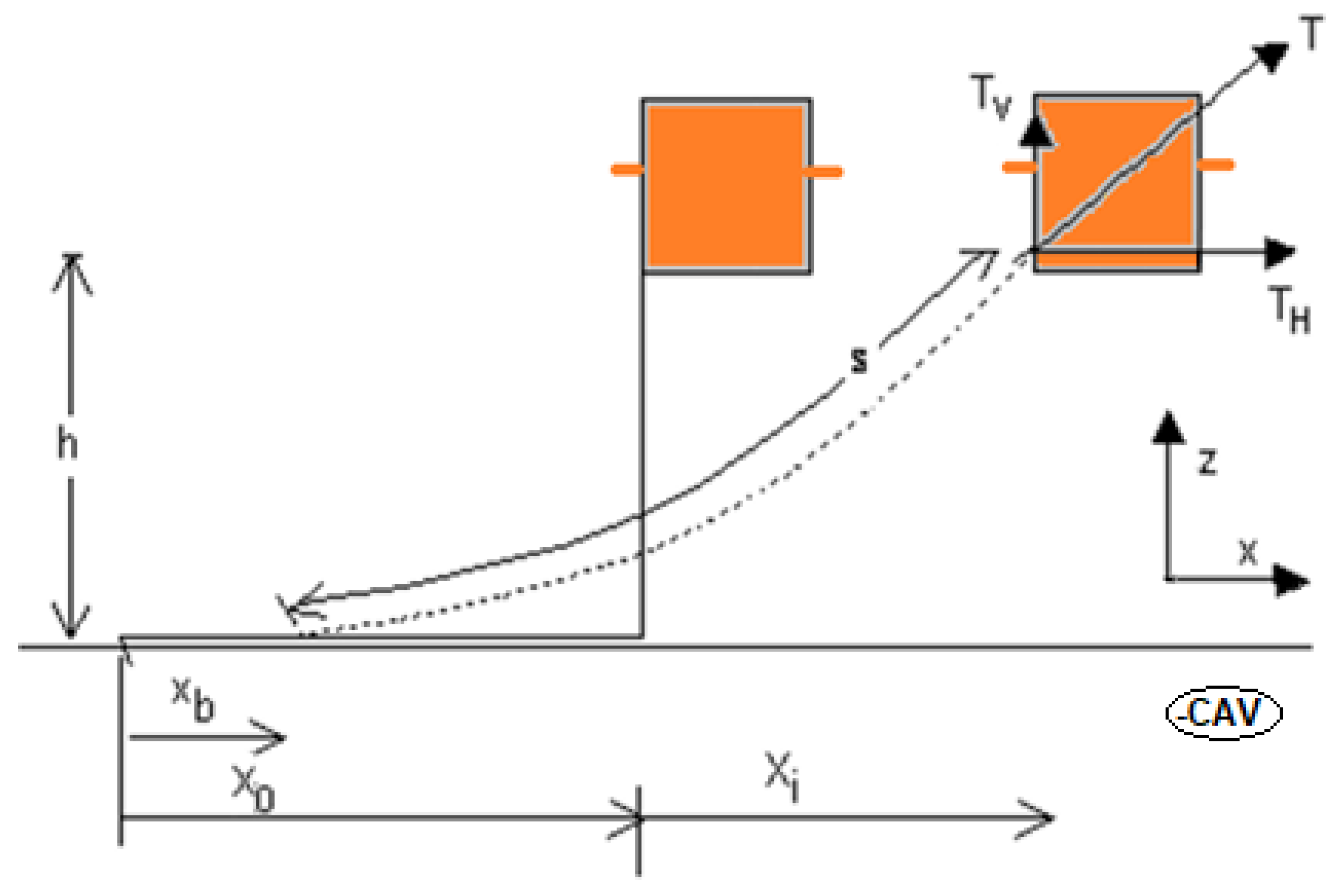
5.1. Static Analysis of Marine Hoses and Risers Subjected to Submerged Self-Weight
- The loads acting on the marine hose or marine riser are defined in the analysis;
- The marine hose is considered to be a hose string, similar to a marine riser in a single line;
- The marine hose has its own buoyancy, which is the only buoyancy considered, and it is assumed that there is no additional buoyancy in the system;
- The marine hose exists in a plane that lies in two dimensions, as produced by both static and quasi-static forces;
- Horizontal tension is applied at the hose end attached to the floater (called the floater end), which predominantly controls the marine hose profile;
- It is assumed that the applied horizontal tension is supported by the floater’s anchoring system;
- The two ends of the marine hose are hinged, whereby the end attached to the mid-arch buoy (called the mid-arch buoy end) has negligible moment as a result of the minimal flexural stiffness of the marine hose.
5.2. Motion Behaviour of Marine Hoses and Risers
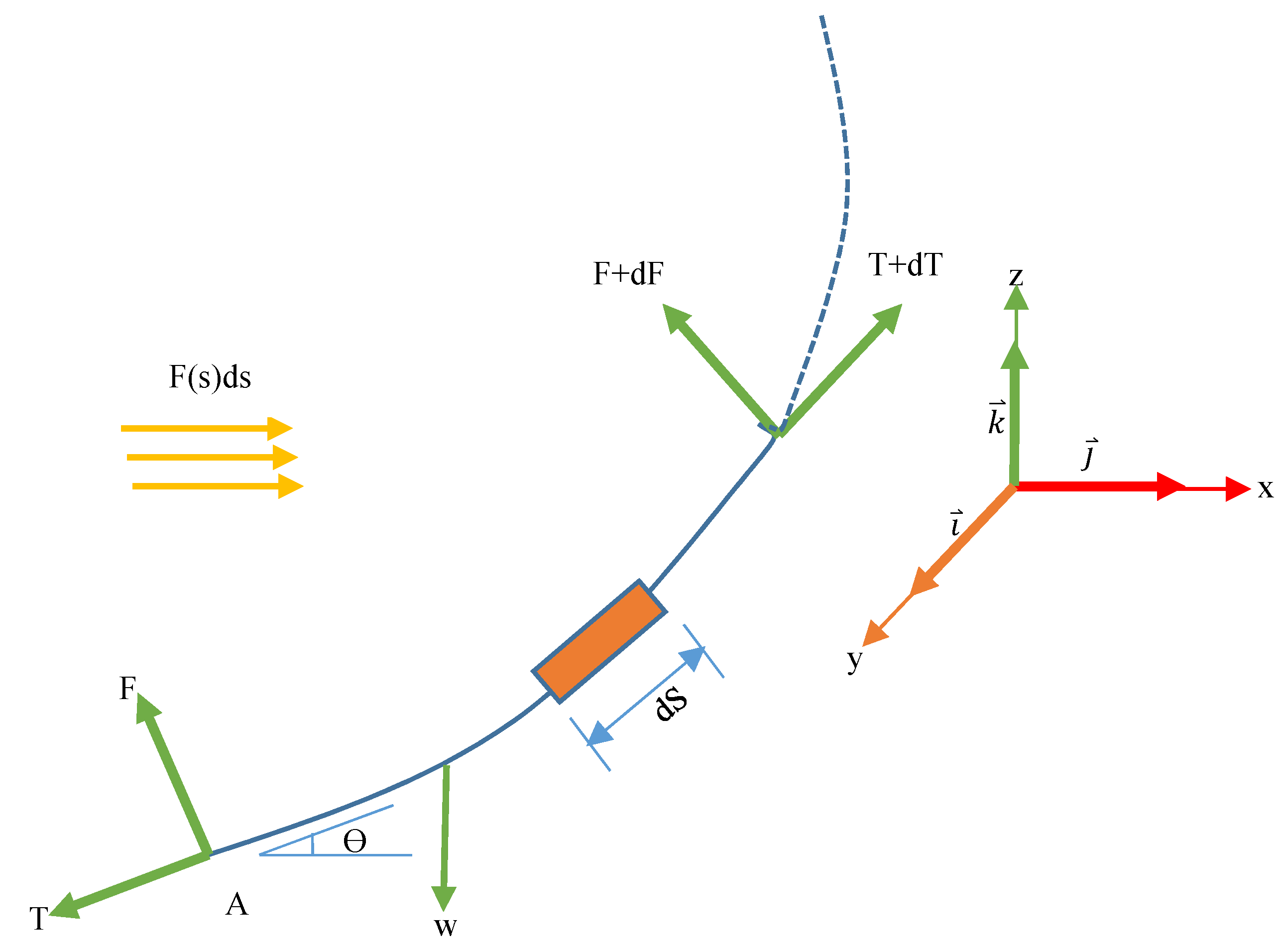
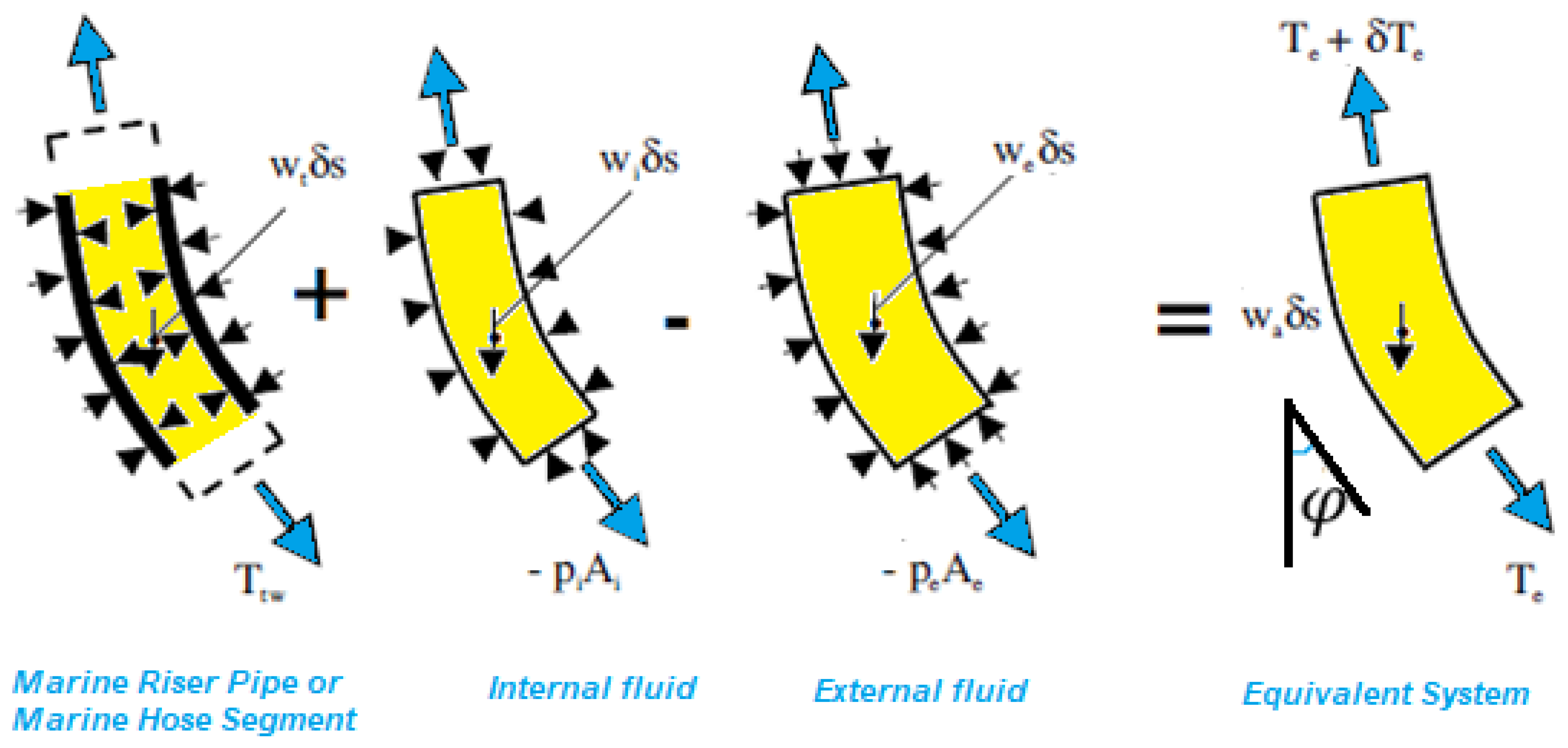
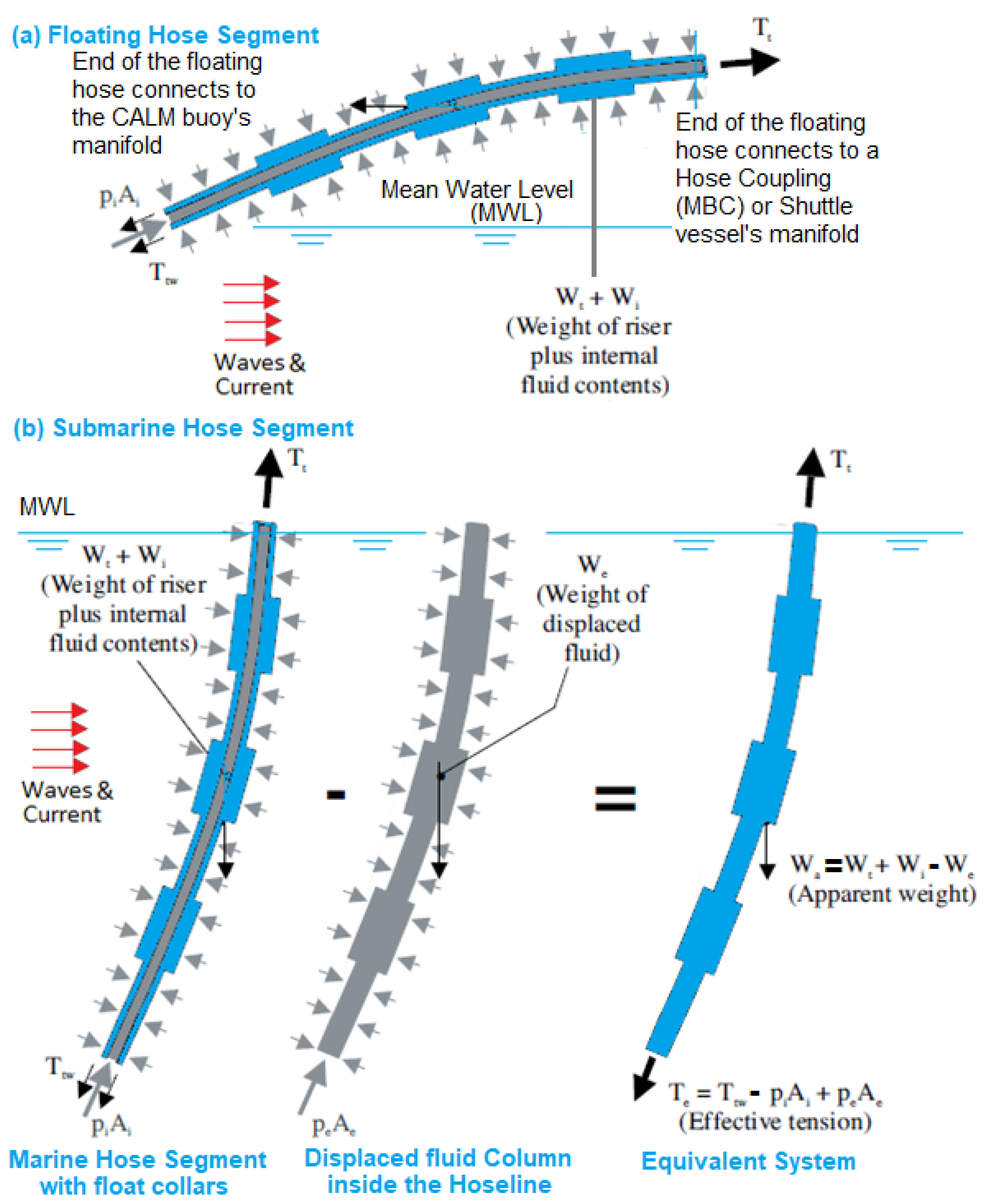
5.3. Static Equilibrium of Marine Hoses and Risers
5.4. Equation of Motion of Marine Hoses and Risers
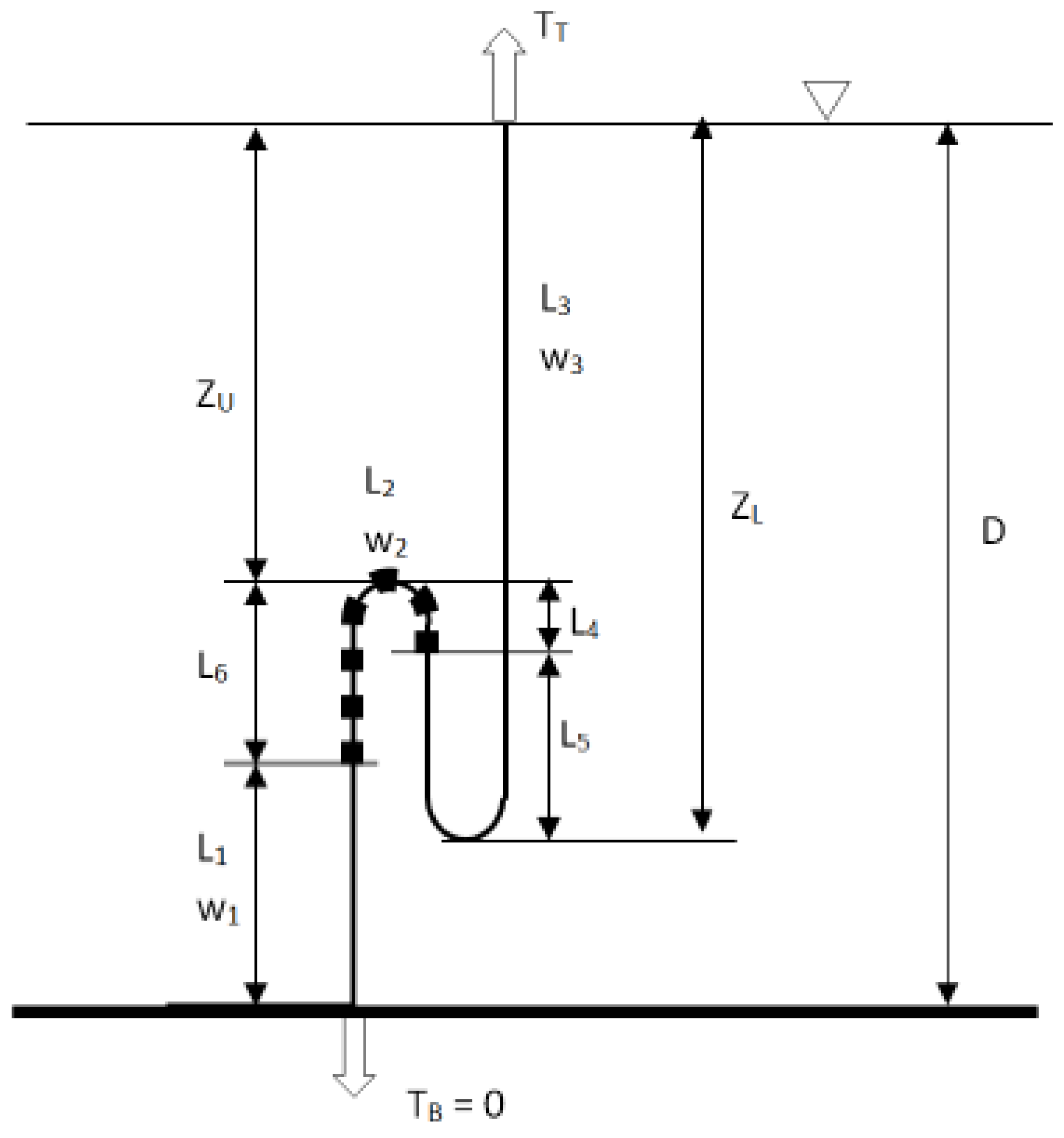
5.5. Analysis of Lazy-Wave Configuration
5.5.1. First Option
5.5.2. Second Option
5.5.3. Third Option
5.6. CALM Catenary Configuration Equations
5.7. Catenary Analysis of Lazy-Wave Configuration
5.8. Fundamental Approaches to the Motion of Marine Hoses and Risers
- (a)
- Time history analysis by the direct integration approach;
- (b)
- Time history analysis by the mode superposition approach;
- (c)
- Frequency domain analysis by the steady-state approach.
5.9. Marine Hose and Riser Response Equations
6. Concluding Remarks
- A mathematical modeling review of marine hoses, SPM moorings and CALM buoys;
- Assessment of marine hoses used for CALM buoys and single point moorings;
- An overview of single point moorings with the contribution to other marine applications;
- Assessment of marine industry application of mooring models (MMs) and hose models (HMs);
- The mathematical modeling of hose behavior, the effect of waves and hydrodynamics.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PC Semi | Paired Column Semisubmersible |
| 2D | Two Dimension(al) |
| 2D or 4D | Two times Diameter or 4 times Diameter |
| 3D | Three Dimension(al) |
| 6DoF | Six Degrees of Freedom |
| ALC | Articulated Loading Column |
| ALP | Articulated Loading Platform |
| BEM | Boundary Element Method |
| BM | Bending Moment |
| BMIT | Bottom mounted internal turret |
| BTM | Buoyant Turret Mooring |
| BVP | Boundary Value Problem |
| CALM | Catenary Anchor Leg Mooring |
| CALM-SY | Catenary anchor leg mooring—soft yoke |
| CALRAM | Catenary anchor leg—rigid arm |
| CBM | Conventional (Or Catenary-Anchored) Buoy Mooring |
| CCS | Cartesian Coordinate System |
| CG | Center Of Gravity |
| DAF | Dynamic Amplification Factor |
| DoF | Degree of Freedom |
| ELSBM | Exposed Location Single Buoy Mooring |
| FEA | Finite Element Analysis |
| FEM | Finite Element Model |
| FLP | Floating Loading Platform |
| FTSPM | Fixed Tower Single Point Mooring |
| FOS | Floating Offshore Structure |
| FPS | Floating Production System |
| FPSO | Floating Production Storage and Offloading |
| FSI | Fluid–Structure Interaction |
| FSO | Floating Storage and Offloading |
| GoM | Gulf of Mexico |
| HM | Hose Model |
| HPHT | High-Pressure, High-Temperature |
| HRT | Hybrid Riser Tower |
| JONSWAP | Joint North Sea Wave Project |
| JSY | Jacket Soft Yoke |
| LancsUni | Lancaster University |
| LF | Low-Frequency |
| MBC | Marine Breakaway Coupling |
| MBR | Minimum Bearing Radius |
| MM | Mooring Model |
| MOS | Marine Offshore Structures |
| MWL | Mean Water Level |
| OCIMF | Oil Companies International Marine Forum |
| OLL | Offloading Line |
| OMS | Offshore Monitoring Systems |
| OPB/IPB | Out-Of-Plane/In-Plane |
| PCSemi | Paired Column Semisubmersible |
| PLEM | Pipeline End Manifold |
| PVC | Poly vinyl chloride |
| RAO | Response Amplitude Operator |
| RFEM | Rigid Finite Element Model |
| RHS | Right Hand Side |
| RMB | Rigid Mooring Buoy |
| RTMS | Riser Turret Mooring System |
| SALM | Single Anchor Leg Mooring |
| SALMRA | Single Anchor Leg Mooring Rigid Arm |
| SALRAM | Single Anchor Leg Rigid Arm Mooring |
| SCR | Steel Catenary Riser |
| S-C | Semi- Coupled |
| SemiSub | SemiSubmersible |
| SLHR | Single Leg Hybrid Riser |
| SPAR | Single Point Anchor Reservoir |
| SPM | Single Point Mooring |
| STB | Submerged Tethered Buoy |
| StC | Strong Coupling |
| STL | Submerged Turret Loading |
| STP | Submerged Turret Production |
| SURF | Subsea Umbilicals, Risers, And Flowlines |
| SURP | Subsea Umbilicals, Risers, And Pipelines |
| TCMS | Tripod Catenary Mooring And Loading System |
| TDP | Touch Down Point |
| TDZ | Touch Down Zone |
| TM | Theoretical Model |
| TRMS | Turret Riser Mooring System |
| TTR | Top Tensioned Riser |
| UKOLS | Ugland Kongsberg Offshore Loading System |
| UPB | Unmanned Production Buoy |
| VALM | Vertical Anchor Leg Mooring |
| VIV | Vortex Induced Vibration |
| VLFS | Very Large Floating Structures |
| WEC | Wave Energy Converters |
| WF | Wave Frequency |
| WkC | Weak Coupling |
References
- Trelleborg. Oil & Gas Solutions: Oil & Gas Hoses for Enhanced Fluid Transfer Solutions. In Trelleborg Fluid Handling Solutions. Oil & Marine Hoses: Innovation and Safety for Oil & Gas Transfer Systems; Trelleborg: Clemont-Ferrand, France, 2018; Volume 1, pp. 1–30. [Google Scholar]
- Bluewater. Buoyed Up: The Future of Tanker Loading/Offloading Operations; Bluewater Energy Services: Amsterdam, The Netherlands, 2009; Available online: https://www.bluewater.com/wp-content/uploads/2013/04/CALM-Buoy-brochure-English.pdf (accessed on 12 July 2021).
- Yokohama. Seaflex Yokohama Offshore Loading & Discharge Hose; The Yokohama Rubber Co. Ltd: Hiratsuka City, Japan, 2016; Available online: https://www.y-yokohama.com/global/product/mb/pdf/resource/seaflex.pdf (accessed on 17 May 2021).
- EMSTEC. EMSTEC Loading & Discharge Hoses for Offshore Moorings; EMSTEC: Rosengarten, Germany, 2016; Available online: https://denialink.eu/pdf/emstec.pdf (accessed on 17 September 2021).
- ARPM. Hose Handbook; IP-2; Association for Rubber Products Manufacturers: Indianapolis, IN, USA, 2019; Available online: https://arpminc.com/publications/category/handbooks-and-guides (accessed on 17 September 2021).
- Chesterton, C. A Global and Local Analysis of Offshore Composite Material Reeling Pipeline Hose, with FPSO Mounted Reel Drum. Bachelor’s Thesis, Lancaster University, Engineering Department, Bailrigg, UK, 2020. [Google Scholar]
- Amaechi, C.V. Single Point Mooring (SPM) Hoses and Catenary Anchor Leg Mooring (CALM) Buoys. LinkedIn Pulse. 2021. Available online: https://www.linkedin.com/pulse/single-point-mooring-spm-hoses-catenary-anchor-leg-calm-amaechi (accessed on 1 September 2021).
- Amaechi, C.V.; Odijie, C.; Sotayo, A.; Wang, F.; Hou, X.; Ye, J. Recycling of Renewable Composite Materials in the Offshore Industry. In Encyclopedia of Renewable and Sustainable Materials; Hashmi, S., Choudhury, I.A., Eds.; Elsevier: Oxford, UK, 2020; Volume 2, pp. 583–613. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Odijie, C.; Etim, O.; Ye, J. Economic Aspects of Fiber Reinforced Polymer Composite Recycling. In Encyclopedia of Renewable and Sustainable Materials; Hashmi, S., Choudhury, I.A., Eds.; Elsevier: Oxford, UK, 2020; Volume 2, pp. 377–397. [Google Scholar] [CrossRef]
- Ye, J.; Cai, H.; Liu, L.; Zhai, Z.V.; Amaechi, C.V.; Wang, Y.; Wan, L.; Yang, D.; Chen, X.; Ye, J. Microscale intrinsic properties of hybrid unidirectional/woven composite laminates: Part I: Experimental tests. Compos. Struct. 2021, 262, 113369. [Google Scholar] [CrossRef]
- Amaechi, C.V. Numerical study on plastic deformation, plastic strains and bending of tubular pipes. Inventions 2021, 9. under review. [Google Scholar]
- Amaechi, C.V.; Gillet, N.; Odijie, C.A.; Xiaonan, H.; Ye, J. Composite Risers for Deep Waters Using a Numerical Modelling Approach. Compos. Struct. 2019, 210, 486–499. [Google Scholar] [CrossRef] [Green Version]
- Amaechi, C.V.; Gillett, N.; Odijie, A.C.; Wang, F.; Hou, X.; Ye, J. Local and Global Design of Composite Risers on Truss SPAR Platform in Deep waters, Paper 20005. In Proceedings of the 5th International Conference on Mechanics of Composites, Lisbon, Portugal, 1–4 July 2019; pp. 1–3. [Google Scholar]
- Amaechi, C.V.; Ye, J. A numerical modeling approach to composite risers for deep waters. In Proceedings of the International Conference on Composite Structures (ICCS20) Proceedings, ICCS20 20th International Conference on Composite Structures, Paris, France, 4–7 September 2017. [Google Scholar]
- Amaechi, C.V. A review of state-of-the-art and meta-science analysis on composite risers for deep seas. Ocean. Eng. 2021. under review. [Google Scholar]
- Amaechi, C.V. Development of composite risers for offshore applications with review on design and mechanics. Ships Offshore Struct. 2021. under review. [Google Scholar]
- Amaechi, C.V. Local tailored design of deep water composite risers subjected to burst, collapse and tension loads. Ocean Eng. 2021. under review. [Google Scholar]
- Gillett, N. Design and Development of a Novel Deepwater Composite Riser. Bachelor’s Thesis, Lancaster University, Engineering Department, Lancaster, UK, 2018. [Google Scholar]
- Amaechi, C.V. Novel Design, Hydrodynamics and Mechanics of Composite Risers in Oil/Gas Applications: Case Study with Marine Hoses. Ph.D. Thesis, Lancaster University, Engineering Department, Lancaster, UK, 2021. [Google Scholar]
- Esmailzadeh, E.; Goodarzi, A. Stability analysis of a CALM floating offshore structure. Int. J. Non-Linear Mech. 2001, 36, 917–926. [Google Scholar] [CrossRef]
- Sun, L.; Zhang, X.; Kang, Y.; Chai, S. Motion response analysis of FPSO’s CALM buoy offloading system. Paper Number OMAE2015-41725. In Proceedings of the International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NW, Canada, 31 May–5 June 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Qi, X.; Chen, Y.; Yuan, Q.; Xu, G.; Huang, K. Calm Buoy and Fluid Transfer System Study. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE17/All-ISOPE17/ISOPE-I-17-128/17225 (accessed on 12 July 2021).
- Duggal, A.; Ryu, S. The dynamics of deepwater offloading buoys. In WIT Transactions on The Built Environment. Fluid Structure Interaction and Moving Boundary Problem; WIT Press: Southampton, UK, 2005; Available online: https://www.witpress.com/Secure/elibrary/papers/FSI05/FSI05026FU.pdf (accessed on 17 May 2021).
- Le Cunff, C.; Ryu, S.; Duggal, A.; Ricbourg, C.; Heurtier, J.; Heyl, C.; Liu, Y.; Beauclair, O. Derivation of CALM Buoy coupled motion RAOs in Frequency Domain and Experimental Validation. In Proceedings of the International Society of Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007; pp. 1–8. Available online: https://www.sofec.com/wp-content/uploads/white_papers/2007-ISOPE-Derivation-of-CALM-Buoy-Coupled-Motion-RAOs-in-Frequency-Domain.pdf (accessed on 19 July 2021).
- Le Cunff, C.; Ryu, S.; Heurtier, J.-M.; Duggal, A.S. Frequency-Domain Calculations of Moored Vessel Motion Including Low Frequency Effect. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; pp. 689–696. [Google Scholar] [CrossRef] [Green Version]
- Salem, A.G.; Ryu, S.; Duggal, A.S.; Datla, R.V. Linearization of Quadratic Drag to Estimate CALM Buoy Pitch Motion in Frequency-Domain and Experimental Validation. J. Offshore Mech. Arct. Eng. 2012, 134, 011305. [Google Scholar] [CrossRef]
- D Rutkowski, G. A Comparison Between Conventional Buoy Mooring CBM, Single Point Mooring SPM and Single Anchor Loading SAL Systems Considering the Hydro-meteorological Condition Limits for Safe Ship’s Operation Offshore. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 187–195. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.J.; Santala, M.J.; Wang, H.; Yung, T.W.; Kan, W.; Sandstrom, R.E. Component Approach for Confident Predictions of Deepwater CALM Buoy Coupled Motions: Part 1—Philosophy. In Proceedings of the ASME 2005 24th International Conference on Offshore Mechanics and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005; pp. 349–356. [Google Scholar] [CrossRef]
- Santala, M.J.; Huang, Z.J.; Wang, H.; Yung, T.W.; Kan, W.; Sandstrom, R.E. Component Approach for Confident Predications of Deepwater CALM Buoy Coupled Motions: Part 2—Analytical Implementation. In Proceedings of the ASME 2005 24th International Conference on Offshore Mechanics and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005; pp. 367–375. [Google Scholar] [CrossRef]
- Kang, Y.; Sun, L.; Kang, Z.; Chai, S. Coupled Analysis of FPSO and CALM Buoy Offloading System in West Africa. Paper Number: OMAE2014-23118. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef]
- Ryu, S.; Duggal, A.S.; Heyl, C.N.; Liu, Y. Prediction of Deepwater Oil Offloading Buoy Response and Experimental Validation. Int. J. Offshore Polar Eng. 2006, 16, 1–7. [Google Scholar]
- O’Sullivan, M. Predicting interactive effects of CALM buoys with deepwater offloading systems. Offshore Mag. 2003, 63, 66–68. [Google Scholar]
- O’Sullivan, M. West of Africa CALM Buoy Offloading Systems. MCS Kenny Offshore Technical Note for Flexcom-3D Version 5.5.2, MCS International. 2002. Available online: http://www.mcskenny.com/downloads/Software-OffshoreArticle.pdf (accessed on 17 May 2018).
- Roveri, F.E.; Volnei, S.; Sagrilo, L.; Cicilia, F.B. A Case Study on the Evaluation of Floating Hose Forces in a C.A.L.M. System. In Proceedings of the International Offshore and Polar Engineering Conference, Kitakyushu, Japan, 26–31 May 2002; Volume 3, pp. 190–197. Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE02/All-ISOPE02/ISOPE-I-02-030/8329 (accessed on 15 August 2021).
- Wang, D.; Sun, S. Study of the Radiation Problem for a CALM Buoy with Skirt. Shipbuild. China 2015, 56, 95–101. [Google Scholar]
- Pecher, A.; Foglia, A.; Kofoed, J.P. Comparison and sensitivity investigations of a CALM and SALM type mooring system for wave energy converters. J. Mar. Sci. Eng. 2014, 2, 93–122. [Google Scholar] [CrossRef]
- Hasanvand, E.; Edalat, P. A Comparison of the Dynamic Response of a Product Transfer System in CALM and SALM Oil Terminals in Operational and Non-Operational Modes in the Persian Gulf region. Int. J. Coast. Offshore Eng. 2021, 5, 1–14. [Google Scholar]
- Hasanvand, E.; Edalat, P. Comparison of Dynamic Response of Chinese Lantern and Lazy-S Riser Configurations Used in CALM Oil Terminal. Mar.-Eng. 2021, 17, 37–52. [Google Scholar]
- Hasanvand, E.; Edalat, P. Sensitivity Analysis of the Dynamic Response of CALM Oil Terminal, in The Persian Gulf Region Under Different Operation Parameters. J. Mar. Eng. 2020, 16, 73–84. [Google Scholar]
- Bidgoli, S.I.; Shahriari, S.; Edalat, P. Sensitive Analysis of Different Types of Deep Water Risers to Conventional Mooring Systems. Int. J. Coast. Offshore Eng. 2017, 5, 45–55. [Google Scholar]
- Berhault, C.; Guerin, P.; le Buhan, P.; Heurtier, J.M. Investigations on Hydrodynamic and Mechanical Coupling Effects for Deepwater Offloading Buoy. In Proceedings of the International Offshore and Polar Engineering Conference, Toulon, France, 23–28 May 2004; Volume 1, pp. 374–379. [Google Scholar]
- Doyle, S.; Aggidis, G.A. Development of multi-oscillating water columns as wave energy converters. Renew. Sustain. Energy Rev. 2019, 107, 75–86. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; George, A.; Wang, Y.; Gu, X.; Li, W.; Chen, Y. Wave tank experiments on the power capture of a multi-axis wave energy converter. J. Mar. Sci. Technol. 2015, 20, 520–529. [Google Scholar] [CrossRef]
- Zhang, D.; Shi, J.; Si, Y.; Li, T. Multi-grating triboelectric nanogenerator for harvesting low-frequency ocean wave energy. Nano Energy 2019, 61, 132–140. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Chesterton, C.; Butler, H.O.; Wang, F.; Ye, J. Review on the design and mechanics of bonded marine hoses for Catenary Anchor Leg Mooring (CALM) buoys. Ocean Eng. 2021, in press. [Google Scholar]
- Amaechi, C.V.; Chesterton, C.; Butler, H.O.; Wang, F.; Ye, J. An overview on Bonded Marine Hoses for sustainable fluid transfer and (un)loading operations via Floating Offshore Structures (FOS). J. Mar. Sci. Eng. 2021, 9. under review. [Google Scholar]
- Amaechi, C.V. Development of bonded marine hoses for sustainable loading and discharging operations in the offshore-renewable industry. J. Pet. Sci. Eng. 2021. under review. [Google Scholar]
- Amaechi, C.V.; Ye, J. Offshore applications of Composite marine risers and submarine hoses in deep waters. In Composite Marine Risers and Submarine Hose Applications for Deep Waters; 20 Minutes Talk; Engineering Department, Lancaster University: Lancaster, UK, 2018; Available online: https://www.research.lancs.ac.uk/portal/en/publications/offshore-applications-ofcomposite-marine-risers-and-submarine-hoses-in-deep-waters(08f8a84b-8e1b-41dc-962e-9203f2aaa62c).html (accessed on 17 May 2021).
- Amaechi, C.V.; Ye, J.; Hou, X.; Wang, F.-C. Sensitivity Studies on Offshore Submarine Hoses on CALM Buoy with Comparisons for Chinese-Lantern and Lazy-S Configuration OMAE2019-96755. In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, 9–14 June 2019. [Google Scholar]
- Amaechi, C.V.; Wang, F.; Hou, X.; Ye, J. Strength of submarine hoses in Chinese-lantern configuration from hydrodynamic loads on CALM buoy. Ocean Eng. 2019, 171, 429–442. [Google Scholar] [CrossRef] [Green Version]
- Young, R.A.; Brogren, E.E.; Chakrabarti, S.K. Behavior of Loading Hose Models in Laboratory Waves and Currents. In Offshore Technology Conference Proceeding; OTC-3842-MS; OnePetro/OTC: Houston, TX, USA, 1980; pp. 421–428. [Google Scholar] [CrossRef]
- Zou, J. Vim Response of a Dry Tree Paired-Column Semisubmersibles Platform and Its Effects on Mooring Fatigue. In Proceedings of the SNAME 19th Offshore Symposium, Houston, TX, USA, 6 February 2014; Available online: https://onepetro.org/SNAMETOS/proceedings-abstract/TOS14/1-TOS14/D013S006R002/3701 (accessed on 17 May 2021).
- Das, S.; Zou, J. Characteristic Responses of a Dry-Tree Paired-Column and Deep Draft Semisubmersible in Central Gulf of Mexico. In Proceedings of the 20th Offshore Symposium, Texas Section of the Society of Naval Architects and Marine Engineers, Houston, TX, USA, 17 February 2015; Available online: https://onepetro.org/SNAMETOS/proceedings-abstract/TOS15/1-TOS15/D013S004R003/3695 (accessed on 17 May 2021).
- Bhosale, D. Mooring Analysis of Paired-Column Semisubmersible. Bachelor’s Thesis, Lancaster University, Engineering Department, Lancaster, UK, 2017. [Google Scholar]
- Zou, J.; Poll, P.; Antony, A.; Das, S.; Padmanabhan, R.; Vinayan, V.; Parambath, A. VIM Model Testing and VIM Induced Mooring Fatigue of a Dry Tree Paired-Column Semisubmersible Platform. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 5–8 May 2014. [Google Scholar] [CrossRef] [Green Version]
- Amaechi, C.V.; Wang, F.; Ye, J. Numerical investigation on mooring line configurations of a Paired Column Semisubmersible for its global performance in deep water condition. Ocean Eng. 2021. under review. [Google Scholar]
- Amaechi, C.V.; Wang, F.; Ye, J. Dynamic analysis of tensioner model applied on global response with marine riser recoil and disconnect. Ocean Eng. 2021. under review. [Google Scholar]
- Amaechi, C.V.; Wang, F.; Ye, J. Parametric investigation on tensioner stroke analysis, recoil analysis and disconnect for the marine drilling riser of a Paired Column Semisubmersible under deep water waves. Ocean Eng. 2021. under review. [Google Scholar]
- Amaechi, C.V. Effect of marine riser integration for characteristic motion response studies on a Paired Column Semisubmersible in deep waters. Mar. Struct. 2021. under review. [Google Scholar]
- Odijie, A.C. Design of Paired Column Semisubmersible Hull. Ph.D. Thesis, Lancaster University, Engineering Department, Lancaster, UK, 2016. Available online: https://eprints.lancs.ac.uk/id/eprint/86961/1/2016AgbomeriePhD.pdf (accessed on 12 February 2020).
- Odijie, A.C.; Wang, F.; Ye, J. A review of floating semisubmersible hull systems: Column stabilized unit. Ocean Eng. 2017, 144, 191–202. [Google Scholar] [CrossRef] [Green Version]
- Odijie, A.C.; Quayle, S.; Ye, J. Wave induced stress profile on a paired column semisubmersible hull formation for column reinforcement. Eng. Struct. 2017, 143, 77–90. [Google Scholar] [CrossRef] [Green Version]
- Odijie, A.C.; Ye, J. Effect of Vortex Induced Vibration on a Paired-Column Semisubmersible Platform. Int. J. Struct. Stab. Dyn. 2015, 15, 1540019. [Google Scholar] [CrossRef]
- Odijie, A.C. Understanding Fluid-Structure Interaction for high amplitude wave loadings on a deep-draft paired column semi-submersible platform: A finite element approach. In Proceedings of the International Conference on Light Weight Design of Marine Structures, Glasgow, UK, 9–11 November 2015. [Google Scholar]
- Friis-Madsen, E.; Sørensen, H.; Parmeggiani, S. The development of a 1.5 MW Wave Dragon North Sea Demonstrator. In Proceedings of the 4th International Conference on Ocean Energy (ICOE 2012), Dublin, Ireland, 17–19 October 2012; pp. 1–5. Available online: https://www.icoe-conference.com/publication/the_development_of_a_1.5_mw_wave_dragon_north_sea_demonstrator/ (accessed on 17 May 2021).
- Davidson, J.; Ringwood, J.V. Mathematical Modelling of Mooring Systems for Wave Energy Converters—A Review. Energies 2017, 10, 666. [Google Scholar] [CrossRef] [Green Version]
- Penalba, M.; Giorgi, G.; Ringwood, J.V. Mathematical modelling of wave energy converters: A review of nonlinear approaches. Renew. Sustain. Energy Rev. 2017, 78, 1188–1207. [Google Scholar] [CrossRef] [Green Version]
- Giorgi, G.; Penalba, M.; Ringwood, J. Nonlinear Hydrodynamic Models for Heaving Buoy Wave Energy Converters. In Proceedings of the Asian Wave and Tidal Energy Conference, Singapore, 25–27 October 2016; Available online: http://mural.maynoothuniversity.ie/9418/1/JR-Nonlinear-2016.pdf (accessed on 4 March 2021).
- Kalogirou, A.; Bokhove, O. Mathematical and numerical modelling of wave impact on wave-energy buoys. In Proceedings of the International Conference on Ocean, Offshore and Arctic Engineering, Busan, Korea, 19–24 June 2016; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Huang, T.S.; Leonard, J.W. Lateral Stability of a Flexible Submarine Hoseline; US Military, Port Hueneme: Oxnard, CA, USA, 1989; Available online: https://apps.dtic.mil/sti/pdfs/ADA219251.pdf (accessed on 8 September 2021).
- Obokata, J. On the basic design of single point mooring (1st Report)-Applications of the Dynamic Stability Analysis to the Primary Planning of the System. J. Soc. Nav. Archit. Jpn. 1987, 161, 183–195. [Google Scholar] [CrossRef] [Green Version]
- Obokata, J.; Nakajima, T. On the basic design of single point mooring system (2nd report)-Estimation of the Mooring Force. J. Soc. Nav. Archit. Jpn. 1988, 163, 252–260. [Google Scholar] [CrossRef] [Green Version]
- Sao, K.; Numata, T.; Kikuno, S. Basic Equation and SALM Buoy Motion. J. Soc. Nav. Archit. Jpn. 1987, 1987, 257–266. [Google Scholar] [CrossRef] [Green Version]
- Lenci, S.; Callegari, M. Simple analytical models for the J-lay problem. Acta Mech. 2005, 178, 23–39. [Google Scholar] [CrossRef]
- Luongo, A.; Zulli, D. Mathematical Models of Beams and Cables; John Wiley & Sons, Inc: London, UK, 2013. [Google Scholar] [CrossRef]
- Irvine, H.M. Cable Structures; MIT Press: Cambridge, MA, USA, 1981; pp. 1–259. [Google Scholar]
- Berteaux, H.O.; Goldsmith, R.A.; Schott, W.E., III. Heave and Roll Response of Free Floating Bodies of Cylindrical Shape; Report WHOI-77-12; Woods Hole Oceanographic Institution: Falmouth, MA, USA, 1977; Available online: https://apps.dtic.mil/sti/pdfs/ADA038215.pdf (accessed on 15 August 2021).
- Berteaux, H.O. Buoy Engineering; John Wiley and Sons: New York, NY, USA, 1976. [Google Scholar]
- Newman, J.N. The Motions of a Spar Buoy in Regular Waves; Report No. 1499; Massachusetts Institute of Technology, Hydromechanics Laboratory: Cambridge, MA, USA, 1963; Available online: http://hdl.handle.net/1721.3/48955 (accessed on 25 July 2021).
- Ibinabo, I.; Tamunodukobipi, D.T. Determination of the Response Amplitude Operator(s) of an FPSO. Engineering 2019, 11, 541–556. [Google Scholar] [CrossRef] [Green Version]
- Baghfalaki, M.; Das, S.K.; Das, S.N. Analytical model to determine response amplitude operator of a floating body for coupled roll and yaw motions and frequency based analysis. Int. J. Appl. Mech. 2012, 4, 1–20. [Google Scholar] [CrossRef]
- Das, S.K.; Baghfalaki, M. Mathematical modelling of response amplitude operator for roll motion of a floating body: Analysis in frequency domain with numerical validation. J. Marine. Sci. Appl. 2014, 13, 143–157. [Google Scholar] [CrossRef]
- Katayama, T.; Hashimoto, K.; Asou, H.; Komori, S. Development of a Motion Stabilizer for a Shallow-Sea-Area Spar Buoy in Wind, Tidal Current and Waves. J. Ocean Wind. Energy 2015, 2, 182–192. [Google Scholar] [CrossRef]
- Bao, J.; Wu, Q.; Xie, J.; Jiang, N.; Ma, L.; Zhang, Z.; Dai, H.; Chen, H.; Liu, L. Design and analysis of a wave-piercing buoy. In Automotive, Mechanical and Electrical Engineering; CRC Press: London, UK, 2017; pp. 69–73. [Google Scholar]
- Jiang, D.; Zhang, J.; Ma, L.; Chen, H.; Qiu, Y.; Li, B.; Liu, L. Effect of heave plate on wave piercing buoy. In Automotive, Mechanical and Electrical Engineering; CRC Press: Boca Raton, FL, USA, 2017; pp. 367–370. [Google Scholar] [CrossRef]
- Jiang, D.; Li, W.; Chen, X.; Chen, H. The strength analysis of the wave piercing buoy. AIP Conf. Proc. 2017, 1834, 030030. [Google Scholar] [CrossRef] [Green Version]
- Graber, H.C.; Terray, E.A.; Donelan, M.A.; Drennan, W.M.; Van Leer, J.C.; Peters, D.B. ASIS—A New Air–Sea Interaction Spar Buoy: Design and Performance at Sea. J. Atmos. Ocean. Technol. 2000, 17, 708–720. [Google Scholar] [CrossRef]
- Zhu, X.; Yoo, W.-S. Numerical modeling of a spherical buoy moored by a cable in three dimensions. Chin. J. Mech. Eng. 2016, 29, 588–597. [Google Scholar] [CrossRef]
- Beirão, P.J.B.F.N.; Malça, C.M.D.S.P. Design and analysis of buoy geometries for a wave energy converter. Int. J. Energy Environ. Eng. 2014, 5, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Kweon, H.-M.; Jeong, W.-M.; Cho, I.-H.; Cho, H.-Y. Design of the dual-buoy wave energy converter based on actual wave data of East Sea. Int. J. Nav. Arch. Ocean Eng. 2015, 7, 739–749. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Yoo, W.S. Dynamic analysis of a floating spherical buoy fastened by mooring cables. Ocean Eng. 2016, 121, 462–471. [Google Scholar] [CrossRef]
- Stearns, T.B. Computer Simulation of Underbuoy Hoses. Master’s Thesis, California State University, Northridge, CA, USA, 1975. Available online: https://scholarworks.calstate.edu/downloads/qj72p950b?locale=en (accessed on 17 May 2021).
- Sweeney, T.E. The Concept of an Unmanned Transatlantic Sailing Buoy (NOAA’s Ark), AMS Report No. 1358; DTIC_ADA132160; Princeton University, Department of Aerospace and Mechanical Sciences: Princeton, NJ, USA, 1977; Available online: https://ia600100.us.archive.org/19/items/DTIC_ADA132160/DTIC_ADA132160.pdf (accessed on 17 May 2021).
- Wang, Y.-L. Design of a cylindrical buoy for a wave energy converter. Ocean Eng. 2015, 108, 350–355. [Google Scholar] [CrossRef]
- Wang, F.; Chen, J.; Gao, S.; Tang, K.; Meng, X. Development and sea trial of real-time offshore pipeline installation monitoring system. Ocean Eng. 2017, 146, 468–476. [Google Scholar] [CrossRef]
- Vickers, A.; Johanning, L. Comparison of damping properties for three different mooring. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009. [Google Scholar]
- Bergdahl, L.; Palm, J.; Eskilsson, C.; Lindahl, J. Dynamically Scaled Model Experiment of a Mooring Cable. J. Mar. Sci. Eng. 2016, 4, 5. [Google Scholar] [CrossRef] [Green Version]
- Cozijn, J.L.; Bunnik, T.H.J. Coupled Mooring Analysis for a Deep Water CALM Buoy. In Proceedings of the ASME 2004 23rd International Conference on Offshore Mechanics and Arctic Engineering, Vancouver, BC, Canada, 20–25 June 2004; pp. 663–673. [Google Scholar] [CrossRef] [Green Version]
- Cozijn, H.; Uittenbogaard, R.; Brake, E.T. Heave, Roll and Pitch Damping of a Deepwater CALM Buoy with a Skirt. In Proceedings of the Fifteenth International Offshore and Polar Engineering Conference, Seoul, Korea, 19–24 June 2005; pp. 388–395. Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE05/All-ISOPE05/ISOPE-I-05-296/9432# (accessed on 15 August 2021).
- Williams, N.A.; McDougal, W.G. Experimental Validation of a New Shallow Water CALM Buoy Design. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Capobianco, R.; Rey, V.; Le Calvé, O. Experimental survey of the hydrodynamic performance of a small spar buoy. Appl. Ocean Res. 2002, 24, 309–320. [Google Scholar] [CrossRef]
- Ricbourg, C.; Berhault, C.; Camhi, A.; Lecuyer, B.; Marcer, R. Numerical and Experimental Investigations on Deepwater CALM Buoys Hydrodynamics Loads. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2006; pp. 1–8. [Google Scholar]
- Eriksson, M.; Isberg, J.; Leijon, M. Theory and Experiment on an Elastically Moored Cylindrical Buoy. IEEE J. Ocean. Eng. 2006, 31, 959–963. [Google Scholar] [CrossRef]
- Saito, H.; Mochizuki, T.; Fukai, T.; Okui, K. Actual measurement of external forces on marine hoses for SPM. In Proceedings of the Offshore Technology Conference Proceeding-OTC 3803, Houston, TX, USA, 19–20 March 1980; pp. 89–97. [Google Scholar]
- Edward, C.; Dev, A.K. Assessment of CALM Buoys Motion Response and Dominant OPB/IPB Inducing Parameters on Fatigue Failure of Offshore Mooring Chains. In Practical Design of Ships and Other Floating Structures. PRADS 2019. Lecture Notes in Civil Engineering; Okada, T., Suzuki, K., Kawamura, Y., Eds.; Springer: Singapore, 2021; Volume 64. [Google Scholar]
- Jean, P.; Goessens, K.; L’Hostis, D. Failure of Chains by Bending on Deepwater Mooring Systems. In Proceedings of the Paper presented at the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2005. [Google Scholar] [CrossRef]
- Denney, D. Chain Failure by Bending on Deepwater Mooring Systems. J. Pet. Technol. 2006, 58, 72–73. [Google Scholar] [CrossRef]
- HSE. Floating Production System—JIP FPS Mooring Integrity. Prepared by Noble Denton Europe Limited for the Health and Safety Executive. Research Report 444. HSE Books: Crown, UK, 2006. Available online: https://www.hse.gov.uk/research/rrpdf/rr444.pdf (accessed on 17 May 2021).
- Brown, M.G.; Hall, T.D.; Marr, D.G.; English, M.; Snell, R.O. Floating Production Mooring Integrity JIP—Key Findings. In Proceedings of the Offshore Technology Conference Held, Houston, TX, USA, 2–5 May 2005. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.; Ye, J. Numerical studies on CALM buoy motion responses, and the effect of buoy geometry cum skirt dimensions with its hydrodynamic waves-current interactions. Ocean Eng. 2021. under review. [Google Scholar]
- Amaechi, C.V.; Wang, F.; Ye, J. Numerical Assessment on the Dynamic Behaviour of Submarine Hoses Attached to CALM Buoy Configured as Lazy-S Under Water Waves. J. Mar. Sci. Eng. 2021, 9, 1130. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.; Ye, J. Understanding the fluid-structure interaction from wave diffraction forces on CALM buoys: Numerical and analytical solutions. Ships Offshore Struct. J. 2021. under review. [Google Scholar]
- Amaechi, C.V. Investigation on hydrodynamic characteristics, wave-current interaction and sensitivity analysis of submarine hoses attached to a CALM buoy. J. Mar. Sci. Eng. 2021, 9. under review. [Google Scholar]
- Amaechi, C.V. Experimental, analytical and numerical study on CALM buoy hydrodynamic motion response and the hose-snaking phenomenon of the attached marine hoses under water waves. J. Mar. Sci. Eng. 2021. under review. [Google Scholar]
- Tonatto, M.L.; Tita, V.; Amico, S.C. Composite spirals and rings under flexural loading: Experimental and numerical analysis. J. Compos. Mater. 2020, 54, 2697–2705. [Google Scholar] [CrossRef]
- Tonatto, M.L.P.; Tita, V.; Forte, M.M.C.; Amico, S.C. Multi-scale analyses of a floating marine hose with hybrid polyaramid/polyamide reinforcement cords. Mar. Struct. 2018, 60, 279–292. [Google Scholar] [CrossRef]
- Tonatto, M.L.P.; Roese, P.B.; Tita, V.; Forte, M.M.C.; Amico, S.C. Offloading marine hoses: Computational and experimental analyses. In Marine Composites: Design and Performance, 1st ed.; Summerscales, J., Graham-Jones, J., Pemberton, R., Eds.; Woodhead Publishing: New York, NY, USA, 2018; Volume 1, pp. 389–416. [Google Scholar]
- Tonatto, M.L.P.; Forte, M.M.; Tita, V.; Amico, S. Progressive damage modeling of spiral and ring composite structures for offloading hoses. Mater. Des. 2016, 108, 374–382. [Google Scholar] [CrossRef]
- Tonatto, M.L.P.; Tita, V.; Araujo, R.T.; Forte, M.M.; Amico, S. Parametric analysis of an offloading hose under internal pressure via computational modeling. Mar. Struct. 2017, 51, 174–187. [Google Scholar] [CrossRef]
- Szczotka, M. Dynamic analysis of an offshore pipe laying operation using the reel method. Acta Mech. Sin. 2011, 27, 44–55. [Google Scholar] [CrossRef]
- Sparks, C.P. Fundamental of Marine Riser Mechanics: Basic Principles and Simplified Analysis, 2nd ed.; PennWell Corporation Books: Tulsa, OK, USA, 2018. [Google Scholar]
- Dareing, D.W. Mechanics of Drillstrings and Marine Risers; ASME Press: New York, NY, USA. [CrossRef]
- Seyed, F.; Patel, M. Mathematics of flexible risers including pressure and internal flow effects. Mar. Struct. 1992, 5, 121–150. [Google Scholar] [CrossRef]
- Patel, M.H.; Seyed, F.B. Review of flexible riser modelling and analysis techniques. Eng. Struct. 1995, 17, 293–304. [Google Scholar] [CrossRef]
- Chakrabarti, S.K.; Frampton, R.E. Review of riser analysis techniques. Appl. Ocean Res. 1982, 4, 73–91. [Google Scholar] [CrossRef]
- Bernitsas, M.M. Problems in Marine Riser Design. Mar. Technol. 1982, 19, 73–82. [Google Scholar] [CrossRef]
- Ertas, A.; Kozik, T.J. A Review of Current Approaches to Riser Modeling. ASME J. Energy Resour. Technol. 1987, 109, 155–160. [Google Scholar] [CrossRef]
- Woo, N.S.; Han, S.M.; Kim, Y.J. Design of a marine drilling riser for the deepwater environment. WIT Trans. Eng. Sci. 2016, 105, 233–242. [Google Scholar] [CrossRef] [Green Version]
- Amaechi, C.V. Analytical cum numerical solutions on added mass and damping of a CALM buoy towards understanding the fluid-structure interaction of marine bonded hose under random waves. Mar. Struct. 2021. under review. [Google Scholar]
- Gao, P.; Gao, Q.; An, C.; Zeng, J. Analytical modeling for offshore composite rubber hose with spiral stiffeners under internal pressure. J. Reinf. Plast. Compos. 2021, 40, 352–364. [Google Scholar] [CrossRef]
- Zhou, Y.; Duan, M.; Ma, J.; Sun, G. Theoretical analysis of reinforcement layers in bonded flexible marine hose under internal pressure. Eng. Struct. 2018, 168, 384–398. [Google Scholar] [CrossRef]
- Bluewater. Conventional Buoy Mooring Systems; Bluewater Energy Services: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Bluewater. Turret Buoy; Bluewater Energy Services: Amsterdam, The Netherlands, 2016; Available online: https://www.bluewater.com/wp-content/uploads/2013/03/turretbuoy_folder.pdf (accessed on 30 July 2021).
- Bluewater. Bluewater Turret Buoy-Technical Description; Bluewater Energy Services: Amsterdam, The Netherlands, 2011; Available online: https://www.bluewater.com/wp-content/uploads/2013/04/digitale-brochure-TurretBouy-Tech-description.pdf (accessed on 30 July 2021).
- Trelleborg. Surface Buoyancy. Trelleborg Marine and Infrastructure: Product Brochure. 2017. Available online: https://www.trelleborg.com/en/marine-and-infrastructure/products-solutions-and-services/marine/surface-buoyancy (accessed on 17 September 2021).
- ContiTech. Marine Hose Brochure. 2020. Available online: https://aosoffshore.com/wp-content/uploads/2020/02/ContiTech_Marine-Brochure.pdf (accessed on 17 February 2021).
- ContiTech. Marine Hoses-Offshore Fluid Transfer; Continental Dunlop; Contitech Oil & Gas: Grimsby, UK, 2017; Available online: http://www.contitech-oil-gas.com/pages/marine-hoses/marine-hoses_en.html (accessed on 17 September 2021).
- ContiTech. High Performance Flexible Hoses Brochure; Continental Dunlop; Contitech Oil & Gas: Grimsby, UK, 2014. [Google Scholar]
- Alfagomma. Industrial Hose & Fittings; Alphagomma SpA: Vimercate, Italy, 2016. [Google Scholar]
- SBMO. SBMO CALM Brochure; SBM Offshore: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Technip. Coflexip® Flexible Steel Pipes for Drilling and Service Applications: User’ s Guide; Technip: Paris, France, 2006. [Google Scholar]
- Trelleborg. Trelline Catalogue. Trelleborg, France. 2014. Available online: http://www2.trelleborg.com/Global/WorldOfTrelleborg/Fluid%20handling/TRELLINE%20Catalogue.pdf. (accessed on 17 May 2021).
- OIL. Offloading Hoses: Floating & Submarine Hoses-OIL Hoses Brochure; Offspring International Limited: Dudley, UK, 2014; Available online: https://www.offspringinternational.com/wp-content/uploads/2020/06/OIL-Offloading-Hoses-Brochure-2020-W.pdf (accessed on 12 July 2021).
- Maslin, E. Unmanned Buoy Concepts Grow; Offshore Engineer: New York, NY, USA, 2014; Volume 1, Available online: http://www.oedigital.com/component/k2/item/5621-unmanned-buoy-concepts-grow. (accessed on 17 May 2021).
- Xu, X.; Chen, G.; Zhu, W.; Shi, Y.; Gao, W.; Jin, W. Study on a New Concept of Offloading System for SDPSO. In Proceedings of the 30th International Ocean and Polar Engineering Conference, Shanghai, China, 11–16 October 2020. [Google Scholar]
- Oliveira, M.C. Ultradeepwater Monobuoys, OMAE2003-37103. In Proceedings of the International Conference on Offshore Mechanics & Arctic Engineering, Cancun, Mexico, 8–13 June 2003; pp. 1–10. [Google Scholar]
- Quash, J.E.; Burgess, S. Improving Underbuoy Hose System Design Using Relaxed Storm Design Criteria. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April 30–3 May 1979. [Google Scholar] [CrossRef]
- Carpenter, E.B.; Idris, K.; Leonard, J.W.; Yim, S.C.S. Behaviour of a moored Discus Buoy in an Ochi-Hubble Wave Spectrum. In Proceedings of the Offshore Technology Conference Proceeding, Houston, TX, USA, 27 February–3 March 1994; pp. 347–354. Available online: http://web.engr.oregonstate.edu/~yims/publications/OMAE1994.DiscusBuoy.pdf (accessed on 17 June 2021).
- Rampi, L.; Lavagna, P.; Mayau, D. TRELLINE? A Cost-Effective Alternative for Oil Offloading Lines (OOLs). Paper Number: OTC-18065-MS. In Proceedings of the Paper Presented at the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2006. [Google Scholar] [CrossRef]
- Prischi, N.; Mazuet, F.; Frichou, A.; Lagarrigue, V. SS-Offshore Offloading Systems and Operations Bonded Flexible Oil Offloading Lines, A Cost Effective Alternative to Traditional Oil Offloading lines. Paper Number: OTC-23617-MS. In Proceedings of the Paper Presented at the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2012. [Google Scholar] [CrossRef]
- Mayau, D.; Rampi, L. Trelline—A New Flexible Deepwater Offloading Line (OLL). In Proceedings of the 16th International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 28 May–2 June 2006; Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE06/All-ISOPE06/ISOPE-I-06-127/9875 (accessed on 17 June 2021).
- Tschoepe, E.C.; Wolfe, G.K. SPM Hose Test Program. In Proceedings of the Offshore Technology, Houston, TX, USA, 4–7 May 1981; pp. 71–80. [Google Scholar] [CrossRef]
- Zhang, S.-F.; Chen, C.; Zhang, Q.-X.; Zhang, N.-M.; Zhang, F. Wave Loads Computation for Offshore Floating Hose Based on Partially Immersed Cylinder Model of Improved Morison Formula. Open Pet. Eng. J. 2015, 8, 130–137. [Google Scholar] [CrossRef] [Green Version]
- Lebon, L.; Remery, J. Bonga: Oil Off-loading System using Flexible Pipe. In Proceedings of the Offshore Technology Conference Proceeding-OTC 14307, Houston, TX, USA, 6 May 2002; pp. 1–12. [Google Scholar]
- Asmara, I.P.S.; Wibowo, V.A.P. Safety Analysis of Mooring Hawser of FSO and SPM Buoy in Irregular Waves. In Proceedings of the Maritime Safety International Conference. IOP Conf. Ser. Earth Environ. Sci. 2020, 557, 012003. [Google Scholar] [CrossRef]
- Løtveit, S.A.; Muren, J.; Nilsen-Aas, C. Bonded Flexibles–State of the Art Bonded Flexible Pipes; 26583U-1161480945-354, Revision 2.0, Approved on 17.12.2018; PSA: Asker, Norway, 2018; pp. 1–75. Available online: https://www.4subsea.com/wp-content/uploads/2019/01/PSA-Norway-State-of-the-art-Bonded-Flexible-Pipes-2018_4Subsea.pdf (accessed on 17 June 2021).
- Muren, J.; Caveny, K.; Eriksen, M.; Viko, N.G.; MÜLler-Allers, J.; JØRgen, K.U. Un-Bonded Flexible Risers–Recent Field Experience and Actions for Increased Robustness; 0389-26583-U-0032, Revision 5.0; PSA: Asker, Norway, 2013; Volume 2, pp. 1–78. Available online: https://www.ptil.no/contentassets/c2a5bd00e8214411ad5c4966009d6ade/un-bonded-flexible-risers--recent-field-experience-and-actions--for-increased-robustness.pdf (accessed on 17 June 2021).
- SouthOffshore. Congo BW CALM Buoy Full Replacement with New SBM Buoy Project. Djeno Terminal. South Offshore. 2018. Available online: https://www.south-offshore.com/portfolio/djeno-terminal/ (accessed on 17 May 2021).
- OIL. Mooring and Offloading Systems; Offspring International Limited: Dudley, UK, 2015; Available online: https://www.offspringinternational.com/wp-content/uploads/2015/04/OIL-SPM-Brochure-2015.pdf (accessed on 12 July 2021).
- Harnois, V. Analysis of Highly Dynamic Mooring Systems: Peak Mooring Loads in Realistic Sea Conditions. Ph.D. Thesis, University of Exeter, Exeter, UK, 2014. [Google Scholar]
- Harnois, V.; Weller, S.D.; Johanning, L.; Thies, P.R.; Le Boulluec, M.; Le Roux, D.; Soule, V.; Ohana, J. Numerical model validation for mooring systems: Method and application for wave energy converters. Renew. Energy 2015, 75, 869–887. [Google Scholar] [CrossRef] [Green Version]
- Brownsort, P. Offshore offloading of CO2: Review of Single Point Mooring Types and Suitability. In SCCS (Scottish Carbon Capture and Storage); SCCS CO2-Enhanced Oil Recovery Joint Industry Project: Eaton Socon, UK, 2015; pp. 1–23. Available online: https://www.sccs.org.uk/images/expertise/misc/SCCS-CO2-EOR-JIP-Offshore-offloading.pdf (accessed on 19 July 2021).
- Gao, Z.; Moan, T. Mooring system analysis of multiple wave energy converters in a farm configuration. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009; pp. 509–518. [Google Scholar]
- Sound and Sea Technology. Advanced Anchoring and Mooring Study; Technical Report; Oregon Wave Energy Trust: Portland, OR, USA, 2009.
- Angelelli, E.; Zanuttigh, B.; Martinelli, L.; Ferri, F. Physical and numerical modelling of mooring forces and displacements of a Wave Activated Body Energy Converter. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; p. V09AT09A044. [Google Scholar] [CrossRef]
- Petrone, C.; Oliveto, N.D.; Sivaselvan, M.V. Dynamic Analysis of Mooring Cables with Application to Floating Offshore Wind Turbines. J. Eng. Mech. 2015, 142, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Wichers, I.J. Guide to Single Point Moorings; WMooring Inc: Houston, TX, USA, 2013; Available online: http://www.wmooring.com/files/Guide_to_Single_Point_Moorings.pdf (accessed on 17 June 2021).
- Bishop, R.E.D.; Price, W.G. Hydroelasticity of Ships; Cambridge University Press: New York, NY, USA, 2005. [Google Scholar]
- Bruschi, R.; Vitali, L.; Marchionni, L.; Parrella, A.; Mancini, A. Pipe technology and installation equipment for frontier deep water projects. Ocean Eng. 2015, 108, 369–392. [Google Scholar] [CrossRef]
- Brebbia, C.A.; Walker, S. Dynamic Analysis of Offshore Structures, 1st ed.; Newnes-Butterworth & Co. Publishers Ltd: London, UK, 1979. [Google Scholar]
- Chandrasekaran, S. Dynamic Analysis and Design of Offshore Structures, 1st ed.; Springer: New Delhi, India, 2015. [Google Scholar]
- Bai, Y.; Bai, Q. Subsea Pipelines and Risers, 1st ed.; 2013 RePrint; Elsevier: Oxford, UK, 2005. [Google Scholar]
- Raheem, S.E.A. Nonlinear response of fixed jacket offshore platform under structural and wave loads. Coupled Syst. Mech. Int. J. 2013, 2, 111–126. [Google Scholar] [CrossRef] [Green Version]
- Papusha, A.N. Beam Theory for Subsea Pipelines: Analysis and Practical Applications; Wiley-Scrivener: Hoboken, NJ, USA, 2015. [Google Scholar]
- Barltrop, N.D.P.; Adams, A.J. Dynamics of Fixed Marine Structures, 3rd ed.; Butterworth Heinemann: Oxford, UK, 1991. [Google Scholar]
- Barltrop, N.D.P. Floating Structures: A Guide for Design and Analysis; Oilfield Publications Limited (OPL): Herefordshire, UK, 1998; Volume 1. [Google Scholar]
- Wilson, J.F. Dynamics of Offshore Structures, 2nd ed.; John Wiley and Sons: New York, NY, USA, 2003. [Google Scholar]
- Bai, Y.; Bai, Q. Subsea Engineering Handbook, 1st ed.; Elsevier: Oxford, UK, 2012. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics; 1999 Repri; IT Press: London, UK, 1977. [Google Scholar]
- Chakrabarti, S.K. Handbook of Offshore Engineering; Elsevier: Oxford, UK, 2005; Volume 1. [Google Scholar]
- Chakrabarti, S.K. Hydrodynamics of Offshore Structures; Reprint; WIT Press: Southampton, UK, 2001. [Google Scholar]
- Chakrabarti, S.K. Offshore Structure Modeling-Advanced Series on Ocean Engineering; World Scientific: Singapore, 1994; Volume 9. [Google Scholar]
- Chakrabarti, S.K. The Theory and Practice of Hydrodynamics and Vibration-Advanced Series on Ocean Engineering; World Scientific: Singapore, 2002; Volume 20. [Google Scholar]
- Chakrabarti, S.K. Handbook of Offshore Engineering; Elsevier: Oxford, UK, 2006; Volume 2. [Google Scholar]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; 1995 Repri; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Païdoussis, M.P. Fluid-Structure Interactions: Slender Structures and Axial Flow, 2nd ed.; Elsevier Ltd: Oxford, UK, 2014. [Google Scholar]
- Morison, J.R.; O’Brien, M.P.; Johnson, J.W.; Schaaf, S.A. The Force Exerted by Surface Waves on Piles. J. Pet. Technol. (Pet. Trans. AIME) 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Walker, B. Dynamic Analysis of Offshore Structures; Newnes-Butterworths: London, UK, 2013. [Google Scholar]
- ABS. Rules For Building And Classing-Single Point Moorings; American Bureau of Shipping: New York, NY, USA, 2021. Available online: https://ww2.eagle.org/content/dam/eagle/rules-and-guides/current/offshore/8_rules-forbuildingandclassingsinglepointmoorings_2021/spm-rules-jan21.pdf (accessed on 17 August 2021).
- DNV. Offshore Standard: Dynamic Risers DNV-OS-F201; Det Norske Veritas: Oslo, Norway, 2010. [Google Scholar]
- DNVGL. DNVGL-OS-E403 Offshore Loading Buoys; Det Norske Veritas & Germanischer Lloyd: Oslo, Norway, 2015. [Google Scholar]
- DNVGL. DNVGL-RP-N103 Modelling and Analysis of Marine Operations; Det Norske Veritas & Germanischer Lloyd: Oslo, Norway, 2017. [Google Scholar]
- DNVGL. DNVGL-RP-F205 Global Performance Analysis of Deepwater Floating Structures; Det Norske Veritas & Germanischer Lloyd: Oslo, Norway, 2017. [Google Scholar]
- Ziccardi, J.J.; Robbins, H.J. Selection of Hose Systems for SPM Tanker Terminals. In Proceedings of the Offshore Technology Conference Proceeding-OTC 1152, Dallas, TX, USA, 21 April 1970; pp. 83–94. [Google Scholar] [CrossRef]
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of wind-wave growth and swell decay during the Joint North Sea Wave Project (JONSWAP). In Ergänzungsheft zur Dtsch. Hydrogr. Z. -Hydraulic Engineering Reports; Deutches Hydrographisches Institut: Hamburg, Germany, 1973; pp. 1–90. Available online: http://resolver.tudelft.nl/uuid:f204e188-13b9-49d8-a6dc-4fb7c20562fc (accessed on 4 March 2021).
- Chakrabarti, S.K. Technical Note: On the formulation of Jonswap spectrum. Appl. Ocean Res. 1984, 6, 175–176. [Google Scholar] [CrossRef]
- Isherwood, R. Technical note: A revised parameterisation of the Jonswap spectrum. Appl. Ocean Res. 1987, 9, 47–50. [Google Scholar] [CrossRef]
- Chibueze, N.O.; Ossia, C.V.; Okoli, J.U. On the Fatigue of Steel Catenary Risers. J. Mech. Eng. 2016, 62, 751–756. [Google Scholar] [CrossRef] [Green Version]
- Pierson, W.J.; Moskowitz, L. A proposed spectral form for fully developed wind seas based on the similarity theory of S. A. Kitaigorodskii. J. Geophys. Res. Space Phys. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Brady, I.; Williams, S.; Golby, P. A study of the Forces Acting on Hoses at a Monobuoy Due to Environmental Conditions. In Proceedings of the Offshore Technology Conference Proceeding-OTC 2136, Dallas, TX, USA, 5–7 May 1974; pp. 1–10. [Google Scholar] [CrossRef]
- Pinkster, J.A.; Remery, G.F.M. The role of Model Tests in the design of Single Point Mooring Terminals. In Proceedings of the Offshore Technology Conference Proceeding-OTC 2212, Dallas, TX, USA, 4–7 May 1975; pp. 679–702. [Google Scholar] [CrossRef]
- Nooij, S. Feasibility of IGW Technology in Offloading Hoses. Masters Dissertation; Civil Engineering Department: Delft, The Netherlands, 2006; Available online: http://resolver.tudelft.nl/uuid:4617e7a0-b5d8-4c86-94d5-8d2037b31769 (accessed on 19 July 2021).
- Lassen, T.; Lem, A.I.; Imingen, G. Load response and finite element modelling of bonded offshore loading hoses. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, OMAE2014, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef]
- API. API 17K: Specification for Bonded Flexible Pipe, 3rd ed.; American Petroleum Institute (API): Washington, DC, USA, 2017. [Google Scholar]
- Yang, S.H.; Ringsberg, J.W.; Johnson, E. Analysis of Mooring Lines for Wave Energy Converters: A Comparison of De-Coupled and Coupled Simulation Procedures. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; p. V04AT02A034. [Google Scholar] [CrossRef]
- Ormberg, H.; Larsen, K. Coupled analysis of floater motion and mooring dynamics for a turret-moored ship. Appl. Ocean Res. 1998, 20, 55–67. [Google Scholar] [CrossRef]
- Idris, K. Coupled Dynamics of Buoys and Mooring Tethers. Ph.D. Thesis, Civil Engineering Department, Oregon State University, Corvallis, OR, USA, 1995. Available online: https://ir.library.oregonstate.edu/concern/graduate_thesis_or_dissertations/3t945v475 (accessed on 12 July 2021).
- Tahar, A.; Kim, M. Hull/mooring/riser coupled dynamic analysis and sensitivity study of a tanker-based FPSO. Appl. Ocean Res. 2003, 25, 367–382. [Google Scholar] [CrossRef]
- Sagrilo, L.V.S.; Siqueira, M.Q.; Ellwanger, G.B.; Lima, E.C.P. A coupled approach for dynamic analysis of CALM systems. Appl. Ocean Res. 2002, 24, 47–58. [Google Scholar] [CrossRef]
- Girón, A.R.C.; Corrêa, F.N.; Hernández, A.O.V.; Jacob, B.P. An integrated methodology for the design of mooring systems and risers. Mar. Struct. 2014, 39, 395–423. [Google Scholar] [CrossRef]
- Girón, A.R.C.; Corrêa, F.N.; Jacob, B.P.; Senra, S.F. An Integrated Methodology for the Design of Mooring Systems and Risers of Floating Production Platforms. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; Volume 44885, pp. 539–549. [Google Scholar] [CrossRef]
- Girón, A.R.C.; Corrêa, F.N.; Jacob, B.P. Evaluation of Safe and Failure Zones of Risers and Mooring Lines of Floating Production Systems. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar] [CrossRef]
- Orcina. OrcaFlex Manual; Version 9.8a; Orcina Ltd: Cumbria, UK, 2014. [Google Scholar]
- Orcina. Orcaflex Documentation, Version 11.0f. 2020. Available online: https://www.orcina.com/webhelp/OrcaFlex/Default.htm (accessed on 16 February 2020).
- ANSYS. ANSYS Aqwa User’s Manual, Release 14.5; ANSYS Inc: Canonsburg, PA, USA, 2012; Available online: https://cyberships.files.wordpress.com/2014/01/wb_aqwa.pdf (accessed on 17 September 2021).
- ANSYS. ANSYS Aqwa Reference Manual, Release 14.5; ANSYS Inc.: Canonsburg, PA, USA, 2012; Available online: https://cyberships.files.wordpress.com/2014/01/aqwa_ref.pdf (accessed on 17 September 2021).
- Bhinder, M.A.; Karimirad, M.; Weller, S.; Debruyne, Y.; Guérinel, M.; Sheng, W. Modelling mooring line non-linearities (material and geometric effects) for a wave energy converter using AQWA, SIMA and Orcaflex. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- DNV and Marintek. Deep C—User Manual, 4.5 Edition. 2010. Available online: https://projects.dnvgl.com/sesam/manuals/DeepC_UM.pdf (accessed on 12 July 2021).
- MARINTEK. MIMOSA 6.3—User’s Documentation. 2010. Available online: https://projects.dnvgl.com/sesam/manuals/Mimosa_UM.pdf (accessed on 12 July 2021).
- Det Norske Veritas (DNV). RIFLEX User’s Manual; Det Norske Veritas: Høvik, Norway, 2011. [Google Scholar]
- MARINTEK. SIMA—Fact Sheet. 2014. Available online: https://www.sintef.no/globalassets/upload/marintek/software/sima.pdf (accessed on 12 July 2021).
- MARINTEK. SIMO—User’s Manual Version 3.6. 2007. Available online: https://projects.dnvgl.com/sesam/manuals/Simo36/Simo-User_Manual.pdf (accessed on 12 July 2021).
- MCS Kenny. Flexcom—Program Documentation. 2016. Available online: http://www.mcskenny.com/support/flexcom/ (accessed on 12 July 2021).
- Dynamic Systems Analysis Ltd. ProteusDS—Manual, 2.5.2135 Edition. 2013. Available online: http://downloads.dsa-ltd.ca/documentation/ProteusDS (accessed on 12 July 2021).
- Masciola, M. Instructional and Theory Guide to the Mooring Analysis Program. NREL. 2013. Available online: https://nwtc.nrel.gov/system/files/MAP_v0.87.06a-mdm.pdf (accessed on 12 July 2021).
- Hall, M. MoorDyn—Users Guide. Available online: http://www.matt-hall.ca/moordyn/ (accessed on 12 July 2021).
- Bergdahl, L. MODEX Version 3 User’s Manual; Department of Hydraulics Report Series B:62; Chalmers University of Technology: Gothenburg, Sweden, 1996. [Google Scholar]
- Palm, J.; Eskilsson, C. MOODY—Users Manual; Version 1.0.0. Department of Mechanics and Maritime Sciences, Chalmers University of Technology: Gothenburg, Sweden, 2018. Available online: https://vbn.aau.dk/ws/portalfiles/portal/280126306/Moody_userManual_1.0.pdf (accessed on 25 October 2021).
- Ferri, F.; Palm, J. Implementation of a Dynamic Mooring Solver (MOODY) into a Wave to Wire Model of a Simple WEC; Technical Report; Department of Civil Engineering, Aalborg University: Aalborg, Denmark, 2015. [Google Scholar]
- Gobat, J.; Grosenbaugh, M. WHOI Cable v2.0: Time Domain Numerical Simulation of Moored and Towed Oceanographic Systems; Technical Report; Woods Hole Oceanographic Institute: Woods Hole, MA, USA, 2000. [Google Scholar]
- Fitzgerald, J.; Bergdahl, L. Considering mooring cables for offshore wave energy converters. In Proceedings of the 7th European Wave Tidal Energy Conference, Porto, Portugal, 11–13 September 2007. [Google Scholar]
- Kimiaei, M.; Randolph, M.; Ting, I. A parametric study on effects of environmental loadings on fatigue life of steel catenary risers (using a nonlinear cyclic riser-soil interaction model), Paper OMAE2010-21153. In Proceedings of the ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 1085–1093. [Google Scholar] [CrossRef]
- Quéau, L.M.; Kimiaei, M.; Randolph, M. Analytical estimation of static stress range in oscillating steel catenary risers at touchdown areas and its application with dynamic amplification factors. Ocean Eng. 2014, 88, 63–80. [Google Scholar] [CrossRef]
- Quéau, L.M.; Kimiaei, M.; Randolph, M.F. Sensitivity studies of SCR fatigue damage in the touchdown zone using an efficient simplified framework for stress range evaluation. Ocean Eng. 2015, 96, 295–311. [Google Scholar] [CrossRef]
- Quéau, L.M.; Kimiaei, M.; Randolph, M.F. Dimensionless groups governing response of steel catenary risers. Ocean Eng. 2013, 74, 247–259. [Google Scholar] [CrossRef]
- Randolph, M.; Quiggin, P. Non-linear hysteretic seabed model for catenary pipeline contact. OMAE2009-79259. In Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering Proceedings, Honolulu, HI, USA, 31 May–5 June 2009; pp. 1–10. Available online: https://www.orcina.com/wp-content/uploads/OMAE2009-79259.pdf (accessed on 17 August 2021).
- Quéau, L.M.; Kimiaei, M.; Randolph, M.F. Dynamic Amplification Factors for Response Analysis of Steel Catenary Risers at Touch Down Areas. In Proceedings of the 21st International Conference on Offshore and Polar Engineering (ISOPE) Proceedings, Maui, HI, USA, 19–24 June 2011; Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE11/All-ISOPE11/ISOPE-I-11-233/13224 (accessed on 17 August 2021).
- Maneschy, R.; Romanelli, B.; Butterworth, C.; Pedrosa, J.; Escudero, C. Steel Catenary Risers (SCRs): From Design to Installation of the First Reel CRA Lined Pipes. Part II: Fabrication and Installation OTC-25857-MS. In Proceedings of the Offshore Technology Conference Proceeding, Houston, TX, USA, 4–7 May 2015. [Google Scholar] [CrossRef]
- Khan, R.A.; Kaur, A.; Singh, S.; Ahmad, S. Nonlinear Dynamic Analysis of Marine Risers under Random Loads for Deepwater Fields in Indian Offshore. Procedia Eng. 2011, 14, 1334–1342. [Google Scholar] [CrossRef] [Green Version]
- Hanonge, D.; Luppi, A. Special Session: Advances in Flexible Riser Technology: Challenges of Flexible Riser Systems in Shallow Waters. In Proceedings of the Paper presented at the Offshore Technology Conference, Houston, TX, USA, 3–6 May 2010. [Google Scholar] [CrossRef]
- Gong, S.; Xu, P. Influences of pipe–soil interaction on dynamic behaviour of deepwater S-lay pipeline under random sea states. Ships Offshore Struct. 2017, 12, 370–387. [Google Scholar] [CrossRef]
- Gong, S.; Xu, P.; Bao, S.; Zhong, W.; He, N.; Yan, H. Numerical modelling on dynamic behaviour of deepwater S-lay pipeline. Ocean Eng. 2014, 88, 393–408. [Google Scholar] [CrossRef]
- Wang, F. Effective design of submarine pipe-in-pipe using Finite Element Analysis. Ocean Eng. 2018, 153, 23–32. [Google Scholar] [CrossRef]
- O’Grady, R.; Harte, A. Localised assessment of pipeline integrity during ultra-deep S-lay installation. Ocean Eng. 2013, 68, 27–37. [Google Scholar] [CrossRef]
- Trapper, P.A. Static analysis of offshore pipe-lay on flat inelastic seabed. Ocean Eng. 2020, 213, 107673. [Google Scholar] [CrossRef]
- Sarpkaya, T. Wave Forces on Offshore Structures, 1st ed.; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar]
- Lighthill, J. Fundamentals concerning wave loading on offshore structures. J. Fluid Mech. 1986, 173, 667–681. [Google Scholar] [CrossRef]
- Lighthill, J. Waves and hydrodynamic loading. In Proceedings of the 2nd International Conference Behavior of Offshore Structures (BOSS ’79), London, UK, 28–31 August 1979; Volume 1, pp. 1–40. [Google Scholar]
- McCormick, M.E. Ocean Engineering Mechanics with Applications; Cambridge University Press: New York, NY, USA, 2010. [Google Scholar]
- Holthuijsen, L.H. Waves in Oceanic and Coastal Waters, 1st ed.; Cambridge University Press: New York, NY, USA, 2007. [Google Scholar]
- Dean, R.G.; Dalrymple, R.A. Water Wave Mechanics for Engineers and Scientists-Advanced Series on Ocean Engineering; World Scientific: Singapore, 1991; Volume 2. [Google Scholar]
- Boccotti, P. Wave Mechanics and Wave Loads on Marine Structures; Elsevier B.V. & Butterworth-Heinemann: Waltham, MA, USA, 2015. [Google Scholar] [CrossRef]
- Boccotti, P. Wave Mechanics for Ocean Engineering; Elsevier, B.V.: Amsterdam, The Netherlands, 2000. [Google Scholar]
- Sorensen, R.M. Basic Coastal Engineering, 3rd ed.; Springer: New York, NY, USA, 2006. [Google Scholar]
- Sorensen, R.M. Basic Wave Mechanics: For Coastal and Ocean Engineers; John Wiley and Sons: London, UK, 1993. [Google Scholar]
- Rahman, M. Non-linear wave loads on large circular cylinders: A perturbation technique. Adv. Water Resour. 1981, 4, 9–19. [Google Scholar] [CrossRef]
- Rahman, M. Second order wave interaction with large structures. In Wave Phenomena: Modern Theory and Applications; Rogers, T.B.M.C., Ed.; Elsevier B.V: North Holland, The Netherlands, 1984; pp. 49–69. [Google Scholar] [CrossRef]
- Newman, J.N.; Lee, C.H. Boundary-Element Methods In Offshore Structure Analysis. J. Offshore Mech. Arct. Eng. 2002, 124, 81. [Google Scholar] [CrossRef]
- Bishop, R.; Johnson, D. The Mechanics of Vibration; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Brown, M.J. Mathematical Model of a Marine Hose-String at a Buoy- Part 1-Static Problem. In Offshore and Coastal Modelling; Dyke, P., Moscardini, A.O., Robson, E.H., Eds.; Springer: London, UK, 1985; pp. 251–277. [Google Scholar] [CrossRef]
- Brown, M.J. Mathematical Model of a Marine Hose-String at a Buoy- Part 2-Dynamic Problem. In Offshore and Coastal Modelling; Dyke, P., Moscardini, A.O., Robson, E.H., Eds.; Springer: London, UK, 1985; pp. 279–301. [Google Scholar] [CrossRef]
- Brown, M.; Elliott, L. Two-dimensional dynamic analysis of a floating hose string. Appl. Ocean Res. 1988, 10, 20–34. [Google Scholar] [CrossRef]
- Rudnick, P. Motion of a Large Spar Buoy in Sea Waves. J. Ship Res. 1967, 11, 257–267. [Google Scholar] [CrossRef]
- Rychlik, I. A new definition of the rainflow cycle counting method. Int. J. Fatigue 1987, 9, 119–121. [Google Scholar] [CrossRef]
- Temarel, P.; Hirdaris, S.E. (Eds.) Hydroelasticity 2009: Hydroelasticity in Marine Technology; University of Southampton: Southampton, UK; p. 405. Available online: https://eprints.soton.ac.uk/69018/ (accessed on 17 August 2021).
- Hirdaris, S.; Temarel, P. Hydroelasticity of ships: Recent advances and future trends. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2009, 223, 305–330. [Google Scholar] [CrossRef]
- Hirdaris, S.; Bai, W.; Dessi, D.; Ergin, A.; Gu, X.; Hermundstad, O.; Huijsmans, R.; Iijima, K.; Nielsen, U.; Parunov, J.; et al. Loads for use in the design of ships and offshore structures. Ocean Eng. 2014, 78, 131–174. [Google Scholar] [CrossRef]
- Timoshenko, S. LXVI. On the correction for shear of the differential equation for transverse vibrations of prismatic bars. Mag. J. Sci. 1921, 41, 744–746. [Google Scholar] [CrossRef] [Green Version]
- Timoshenko, S.P.X. On the transverse vibrations of bars of uniform cross-section. Mag. J. Sci. 1922, 43, 125–131. [Google Scholar] [CrossRef] [Green Version]
- Hirdaris, S.E.; Lees, A.W. A conforming unified finite element formulation for the vibration of thick beams and frames. Int. J. Numer. Methods Eng. 2005, 62, 579–599. [Google Scholar] [CrossRef]
- O’Donoghe, T.; Halliwell, A.R. Floating Hose-Strings Attached to a CALM Buoy. In Proceedings of the Offshore Technology Conference Proceeding-OTC 5717, Houston, TX, USA, 2–5 May 1988; pp. 313–320. [Google Scholar]
- O’Donoghue, T.; Halliwell, A. Vertical bending moments and axial forces in a floating marine hose-string. Eng. Struct. 1990, 12, 124–133. [Google Scholar] [CrossRef]
- O’Donoghue, T. The Dynamic Behaviour of a Surface Hose Attached to a CALM Buoy. Ph.D. Thesis, Heriot-Watt University, Edinburgh, UK, 1987. Available online: https://www.ros.hw.ac.uk/handle/10399/1045?show=full (accessed on 17 May 2021).
- Bree, J.; Halliwell, A.R.; O’Donoghue, T. Snaking of Floating Marine Oil Hose Attached to SPM Buoy. J. Eng. Mech. 1989, 115, 265–284. [Google Scholar] [CrossRef]
- Amaechi, C.V. Numerical assessment of marine hose load response during reeling and free-hanging operations under ocean waves. Ocean Eng. 2021. under review. [Google Scholar]
- Gao, Q.; Zhang, P.; Duan, M.; Yang, X.; Shi, W.; An, C.; Li, Z. Investigation on structural behavior of ring-stiffened composite offshore rubber hose under internal pressure. Appl. Ocean Res. 2018, 79, 7–19. [Google Scholar] [CrossRef]
- Wang, F.; Han, L. Analytical behaviour of carbon steel-concrete-stainless steel double skin tube (DST) used in submarine pipeline structure. Mar. Struct. 2019, 63, 99–116. [Google Scholar] [CrossRef]
- Xia, M.; Takayanagi, H.; Kemmochi, K. Analysis of multi-layered filament-wound composite pipes under internal pressure. Compos. Struct. 2001, 53, 483–491. [Google Scholar] [CrossRef]
- Sun, X.S.; Tan, V.B.C.; Chen, Y.; Tan, L.B.; Jaiman, R.K.; Tay, T.-E. Stress analysis of multi-layered hollow anisotropic composite cylindrical structures using the homogenization method. Acta Mech. 2013, 225, 1649–1672. [Google Scholar] [CrossRef]
- Chou, P.C.; Carleone, J. Elastic constants of layered media. J. Compos. Mater. 1971, 6, 80–93. [Google Scholar] [CrossRef]
- Gonzalez, G.M.; De Sousa, J.R.M.; Sagrilo, L.V.S. A study on the axial behavior of bonded flexible marine hoses. Mar. Syst. Ocean Technol. 2016, 11, 31–43. [Google Scholar] [CrossRef]
- Milad, M.; Green, S.; Ye, J. Mechanical properties of reinforced composite materials under uniaxial and planar tension loading regimes measured using a non-contact optical method. Compos. Struct. 2018, 202, 1145–1154. [Google Scholar] [CrossRef] [Green Version]
- Aboshio, A.; Green, S.; Ye, J. Experimental investigation of the mechanical properties of neoprene coated nylon woven reinforced composites. Compos. Struct. 2015, 120, 386–393. [Google Scholar] [CrossRef]
- Gonzalez, G.M.; Cortina, J.P.R.; de Sousa, J.R.M.; Sagrilo, L.V.S. Alternative Solutions of the Geodesic Differential Equations Applied to the Mechanical Analysis of the Tensile Armors of Flexible Pipes under Bending. Math. Probl. Eng. 2018, 2018, 1040973. [Google Scholar] [CrossRef]
- Gonzalez, G.M.; de Sousa, J.R.M.; Sagrilo, L.V.S. A Finite Element Model for the Instability Analysis of Flexible Pipes Tensile Armor Wires. J. Mech. Eng. Autom. 2017, 7, 165–170. [Google Scholar] [CrossRef] [Green Version]
- Ruan, W.; Shi, J.; Sun, B.; Qi, K. Study on fatigue damage optimization mechanism of deepwater lazy wave risers based on multiple waveform serial arrangement. Ocean. Eng. 2021, 228, 108926. [Google Scholar] [CrossRef]
- Engseth, A.; Bech, A.; Larsen, C.M. Efficient method for analysis of flexible risers. In Proceedings of the Behaviour of Offshore Structures, Trondheim, Norway, 2–8 June 1988; Volume 3, p. 1357. [Google Scholar]
- Jain, A. Review of flexible risers and articulated storage systems. Ocean Eng. 1994, 21, 733–750. [Google Scholar] [CrossRef]
- OCIMF. Guide to Manufacturing and Purchasing Hoses for Offshore Moorings (GMPHOM); Witherby Seamanship International Ltd: Livingstone, UK, 2009. [Google Scholar]
- OCIMF. Guideline for the Handing, Storage, Inspection and Testing of the Hose, 2nd ed.; Witherby & Co. Ltd: London, UK, 1995. [Google Scholar]
- OCIMF. Single Point Mooring Maintenance and Operations Guide (SMOG); Witherby & Co. Ltd: London, UK, 1995. [Google Scholar]
- Bruce, E.B.; Metcalf, F.M. Nonlinear Dynamic Analysis Of Coupled Axial And Lateral Motions Of Marine Risers. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 1977. [Google Scholar] [CrossRef]
- Fergestad, D.; Løtveit, S.A. Handbook on Design and Operation of Flexible Pipes, Sintef MARINTEK/NTNU/4Subsea. 2017. Available online: https://www.4subsea.com/wp-content/uploads/2017/07/Handbook-2017_Flexible-pipes_4Subsea-SINTEF-NTNU_lo-res.pdf (accessed on 25 August 2021).
- Gonzalez, G.M.; de Sousa, J.R.M.; Sagrilo, L.V.S. A modal finite element approach to predict the lateral buckling failure of the tensile armors in flexible pipes. Mar. Struct. 2019, 67, 102628. [Google Scholar] [CrossRef]
- Brownsort, P. Ship Transport of CO2 for Enhanced Oil Recovery: Literature Review. 2015. Available online: https://era.ed.ac.uk/handle/1842/15703 (accessed on 19 July 2021).































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Description | System Type | Abbreviation | Flexible Hose Type |
|---|---|---|---|---|
| Articulated | Articulated, buoyant column for rotation. Single seabed attachment, gravity or piled. Mooring by hawser or rigid arm/yoke. Surface flowline connections via floating hoses, or within rigid arm, or aerial hoses from the raised platform (ALC/ALP). Seabed connections via flexible or by universal joint in flowline. | Single Anchor Leg Mooring | SALM | Floating and Submarine |
| Single Anchor Leg Rigid Arm Mooring | SALRAM | Floating and Submarine | ||
| Single Anchor Leg Mooring Rigid Arm | SALMRA | Floating and Submarine | ||
| Single Anchor Leg Storage | SALS | SALS use both. ALC, ALP and possibly some SAL designs use universal joints rather than Submarine hoses. | ||
| Articulated loading column | ALC/ARTC | |||
| Articulated loading platform | ALP | |||
| Buoy | Buoy has turntable section, or swivel. Seabed fixing by one or more catenary lines or tension legs from varied anchor options. Mooring by hawser or rigid arm/yoke. Surface flowline connections via floating hoses, or within rigid arm. Flexible seabed connections. | Catenary anchor leg mooring | CALM | Floating and Submarine |
| Catenary anchor leg mooring—soft yoke | CALM-SY | Floating and Submarine | ||
| Catenary anchor leg—rigid arm | CALRAM | Floating and Submarine | ||
| Rigid mooring buoy | RMB | Floating and Submarine | ||
| Single buoy mooring | SBM | Floating and Submarine | ||
| Unmanned production buoy | UPB | Floating and Submarine | ||
| Vertical Anchor Leg Mooring | VALM | Floating and Submarine | ||
| Fixed Tower | Rigid tower/jacket fixed to seabed with above-water rotating section. Mooring by hawser or articulated yoke. Above-water flowline connections by aerial hoses or within articulated yoke. Rigid riser with above-water swivel joint. | Fixed Tower Single Point Mooring | FTSPM | Floating flexibles |
| Jacket soft yoke | JSY | Floating flexibles | ||
| Floating flexibles | ||||
| Floating flexibles | ||||
| Floating tower | Large floating tower/spar structure with above-water rotating section. Seabed fixing via multiple catenary lines or tension legs from varied anchor options. Mooring by hawser. Above-water flowline connections by aerial hoses. Flexible Seabed connections. | Exposed location single buoy mooring | ELSBM | Floating and Submarine |
| Floating loading platform | FLP | Floating and Submarine | ||
| Floating cylinder facility | SPAR | Floating and Submarine flexibles | ||
| Spread | Usually 4 CBM, with hawsers. Flexible risers and surface hose connections. | Conventional (or catenary-anchored) buoy mooring | CBM | Floating and Submarine |
| Submerged flexible | Flexible riser with pick-up buoy and wire, stored on seabed when not in use; SAL has catenary mooring connection, SLS has none, requiring a DP ship. | Single Anchor Loading | SAL | Floating and Submarine |
| Submerged loading system | SLS | Floating and Submarine flexibles | ||
| Submerged buoy | Submerged buoy at depth clear of shipping, tethered by one or more catenary lines or tension legs from varied anchor options. Either mooring hawser with pick-up buoy from main buoy, or no mooring connection, requiring DP ship. Flexible or part-rigid (hybrid) riser and flowline connection from seabed, via main buoy to ship, with pick-up buoy and wire. Main buoy usually has swivel/turntable to allow weather-vaning. | Hybrid riser tower | HRT | Floating and Submarine |
| Single anchor loading | SAL | Floating and Submarine | ||
| Single leg hybrid riser | SLHR | Floating and Submarine | ||
| Submerged tethered buoy | STB | Floating and Submarine | ||
| Tripod catenary mooring and loading system | TCMS | Floating flexibles | ||
| Ugland Kongsberg offshore loading system | UKOLS | Floating flexibles | ||
| Turret | Turret concept involves swiveling manifold integrated with internal well through ship, or external support structure, at bow to allow weather-vaning. Turret may be fixed or disconnectable. Disconnectable turrets submerged with pick-up buoy or on surface. Turret tethered by multiple catenary lines from varied anchor options. Flexible riser from seabed, connection via turret. | Bottom mounted internal turret | BMIT | Floating flexibles |
| Buoyant turret mooring | BTM | Floating flexibles | ||
| Riser turret mooring system | RTMS | Floating and Submarine | ||
| Single point turret | SPT | Floating and Submarine | ||
| Submerged turret loading | STL | Floating and Submarine | ||
| Submerged turret production | STP | Floating and Submarine | ||
| Turret riser mooring system | TRMS | Floating and Submarine |
| Characteristics | Turret Moored | Spread Moored |
|---|---|---|
| Vessel Orientation | 360 degree weather-vaning. | Fixed |
| Environment | Moderate to extreme, multidirectional. | Mild to moderate, one-directional |
| Field Layout | Fairly adaptable and suitable for a congested seabed. | Not suitable for congested field. |
| Riser Number and Arrangement | Suitable for medium riser numbers with moderate expansion capabilities. | Suitable for large riser numbers with capability of additional tie-ins. |
| Station Keeping Performance | Lower number of anchor legs, offset is minimized. | Large number of anchor legs, offset is variable. |
| Vessel Motions | Motions are reduced as the vessel orients itself into the most suitable environmental direction. | Varies from small to large depending upon the relative direction of vessel and environment. |
| Riser Connection | Turret provides the connection point for the risers. | Risers hang from the porch on the port/starboard side of FPSO. |
| Offloading Performance | Better as the FPSO is aligned with the mean environment. | Depends on vessel/environment orientation. |
| Storage Capacity | Storage is reduced for internal Turret Moored FPSO. | Large storage capacity available. |
| Software | Vendor | Approach | Academic Availability at LancsUni | Popularity | Usage | ||
|---|---|---|---|---|---|---|---|
| Nonlinear FEM | Frequency Domain | Time Domain | |||||
| Orcaflex | ORCINA | √ | √ | √ | √ | **** | Wide |
| ABAQUS | SIMULIA | √ | √ | √ | √ | ***** | Limited |
| ANSYS | ANSYS | √ | √ | √ | √ | ***** | Limited |
| DeepLines | PRINCIPIA | √ | √ | √ | *** | Limited | |
| ANFLEX | - | √ | √ | √ | *** | Limited | |
| Freecom | MCS | √ | √ | * | Limited | ||
| Flexcom | MCS | √ | √ | ***** | Wide | ||
| Riflex, | MARINTEK | √ | √ | √ | ***** | Limited | |
| Simscale | SIMSCALE | √ | √ | √ | *** | Limited | |
| Sesam | DNV | √ | √ | √ | *** | Limited | |
| Orcalay | Orcina | √ | √ | √ | *** | Limited | |
| Pipelay | MCS | √ | √ | √ | *** | Limited | |
| Solidworks | Dassault Syst. | √ | √ | √ | √ | ***** | Limited |
| Mathcad | MATHSOFT | √ | √ | √ | **** | Limited | |
| MatLab | MATHWORKS | √ | √ | √ | √ | ***** | Limited |
| PVI | Pegasus Vertex | √ | √ | √ | * | Limited | |
| MOSES | Bentley | √ | √ | √ | **** | Wide | |
| DeepC | DNV | √ | √ | √ | **** | Limited | |
| Helica | DNV | √ | √ | √ | ** | Limited | |
| LabView | National Instru. | √ | √ | √ | √ | **** | Limited |
| PIPESIM | Schlumberger | √ | √ | √ | * | Limited | |
| OLGA | Schlumberger | √ | √ | √ | * | Limited | |
| Inventor | Autodesk | √ | √ | √ | √ | *** | Limited |
| VIVANA | DNV | √ | √ | √ | **** | Limited | |
| Software | S | QS | TD | FD | WEC | CALM | SPM |
|---|---|---|---|---|---|---|---|
| Commercial: | |||||||
| - OrcaFlex [213,214] | x | x | x | x | x | ||
| - AQWA [215,216,217] | x | x | x | x | x | x | x |
| - DNV Sesam | x | x | |||||
| * Deep C [218] | x | x | x | ||||
| * MIMOSA [219] | x | x | x | x | x | ||
| * RIFLEX [220] | x | x | x | ||||
| * SIMA [221] | x | x | x | ||||
| * SIMO [222] | |||||||
| - FLEXCOM [223] | x | x | x | x | x | x | x |
| - Proteus DS [224] | x | x | x | x | |||
| Open-source: | |||||||
| - MAP [225] | x | ||||||
| - MoorDyn [226] | x | x | x | ||||
| In-house: | |||||||
| - AQUA-FE | x | x | x | ||||
| - MoDEX [227] | x | x | x | ||||
| - MooDy [228,229] | x | x | x | ||||
| - WHOI Cable [230] | x | x | x | x | |||
| Elastomers | General Attributes |
|---|---|
| Natural rubber | Excellent physical properties, high elasticity, flexibility, very good abrasion, limited resistance to acids, not resistant to oil |
| Silicone rubber | Very good hot air resistance approximately up to +250 °C for short periods of time, good low-temperature behavior, ozone and weather resistance, limited oil resistance, not resistant to petrol and acids |
| NVC (NBR/PVC) | Excellent oil resistance and weather resistance for both lining and cover, not particularly resistant to cold |
| Fluorinated rubber (Viton) | Excellent high-temperature resistance up to +225 °C and up to +350 °C for short periods of time especially in oil and water, very good chemical resistance |
| Acrylo-nitrile rubber (Nitrile, NBR) | Excellent oil resistance, limited resistance to aromatic compounds, resistance to fuel and flexibility under cold depend on I content |
| Chlorosulfonated polyethylene | Excellent weather, ozone, and acid resistance, limited resistance to mineral–oil-derived liquids |
| Ethylene propylene rubber (EPDM) | Excellent ozone, chemical and ageing properties, low resistance to oil-derived liquids, very good steam resistance, good cold and heat resistance (−40 °C to +175 °C), good resistance to brake fluid based on glycerol |
| Butyl rubber | Excellent weather resistance, low air and gas permeability, good acid and caustic resistance, good physical properties, good heat and cold resistance, no resistance to mineral–oil-deprived liquids |
| Chlorinated polyethylene (CPE) | Excellent resistance to ozone and weather, medium resistance to aromatic compounds and oil, excellent flame resistance |
| Hydrogenated nitrile rubber (HNBR) | Good resistance to mineral–oil-based fluids, animal fats and vegetable fats |
| Acrylate rubber | Excellent oil and tar resistance at high temperatures |
| Styrene-butadiene rubber (SBR) | Good physical properties, good abrasion resistance, low resistance to mineral–oil-derived liquids |
| Chlorobutyl rubber | Variant of butyl rubber |
| Polychloroprene (Neoprene) | Excellent weather resistance, flame-retardant, medium oil resistance, good physical properties, good abrasion resistance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amaechi, C.V.; Wang, F.; Ye, J. Mathematical Modelling of Bonded Marine Hoses for Single Point Mooring (SPM) Systems, with Catenary Anchor Leg Mooring (CALM) Buoy Application—A Review. J. Mar. Sci. Eng. 2021, 9, 1179. https://doi.org/10.3390/jmse9111179
Amaechi CV, Wang F, Ye J. Mathematical Modelling of Bonded Marine Hoses for Single Point Mooring (SPM) Systems, with Catenary Anchor Leg Mooring (CALM) Buoy Application—A Review. Journal of Marine Science and Engineering. 2021; 9(11):1179. https://doi.org/10.3390/jmse9111179
Chicago/Turabian StyleAmaechi, Chiemela Victor, Facheng Wang, and Jianqiao Ye. 2021. "Mathematical Modelling of Bonded Marine Hoses for Single Point Mooring (SPM) Systems, with Catenary Anchor Leg Mooring (CALM) Buoy Application—A Review" Journal of Marine Science and Engineering 9, no. 11: 1179. https://doi.org/10.3390/jmse9111179
APA StyleAmaechi, C. V., Wang, F., & Ye, J. (2021). Mathematical Modelling of Bonded Marine Hoses for Single Point Mooring (SPM) Systems, with Catenary Anchor Leg Mooring (CALM) Buoy Application—A Review. Journal of Marine Science and Engineering, 9(11), 1179. https://doi.org/10.3390/jmse9111179