
3-Dimensional Modeling and Attitude Control of Multi-Joint Autonomous Underwater Vehicles




Abstract
:1. Introduction
- (1)
- A novel AUV with orthogonal joints was proposed and designed for rapid and flexible vertical profile exploration of deep-sea hybrid structures, and the 3D motion model of the designed AUV was established according to Newton’s second law and the principle of moment balance.
- (2)
- To reduce the coupling degree of the controller and improve the accuracy of attitude control, a linear quadratic regulation (LQR) decoupling control method based on a linear extended state observer (LESO) [29] was proposed.
2. Modelling
2.1. Structure of the MJ-AUV
2.2. Assumptions
- (1)
- The vehicle is an ideal multi-rigid body structure, all the forces acting on it can be equivalent to a combined force.
- (2)
- The influence of the rotation of the earth is ignored, that is, the inertial frame is not affected by the force generated by the rotation of the earth.
- (3)
- The attitude adjustment of the orthogonal joint is realized by two motors rotating in the same direction or opposite direction. And the joint angle is a linear mapping relationship with the motor rotation angle, so the joint angle can be directly used as the input of the system.
- (4)
- There is a nonlinear mapping relationship between thrust and speed. In practical engineering, the thrust output of the thruster can be adjusted by the inner loop control. It is assumed that the inner loop control effect is good, and the thrust is defined as the direct input of the system.
- (5)
- The vehicle works in the deep-sea environment, where the movement speed is relatively slow and the joints do not swing frequently. Therefore, it is assumed that the hydrodynamic coefficient of each cabin is only related to its own shape and size.
- (6)
- The center of buoyancy in each cabin coincides with the centroid, and the center of gravity is directly below the centroid.
- (7)
- It is assumed that the density of seawater at different depths does not change much and is approximately constant.
2.3. Coordinate System Definition
2.4. Motion Parameters Definition
- (1)
- Displacement
- (2)
- Attitude
- (3)
- Joint angles
- (4)
- The linear velocity and angular velocity components of the body coordinate system
2.5. Kinematic Analysis
2.6. Dynamic Analysis
2.6.1. Hydrodynamic Analysis
2.6.2. Gravity and Gravitational Moment
2.6.3. Thrust Analysis
2.6.4. Dynamical Equation
3. Attitude Controller Design
3.1. Linear Extended State Observer Design
3.2. Control Law Design
3.3. Stability Analysis
4. Simulation and Results
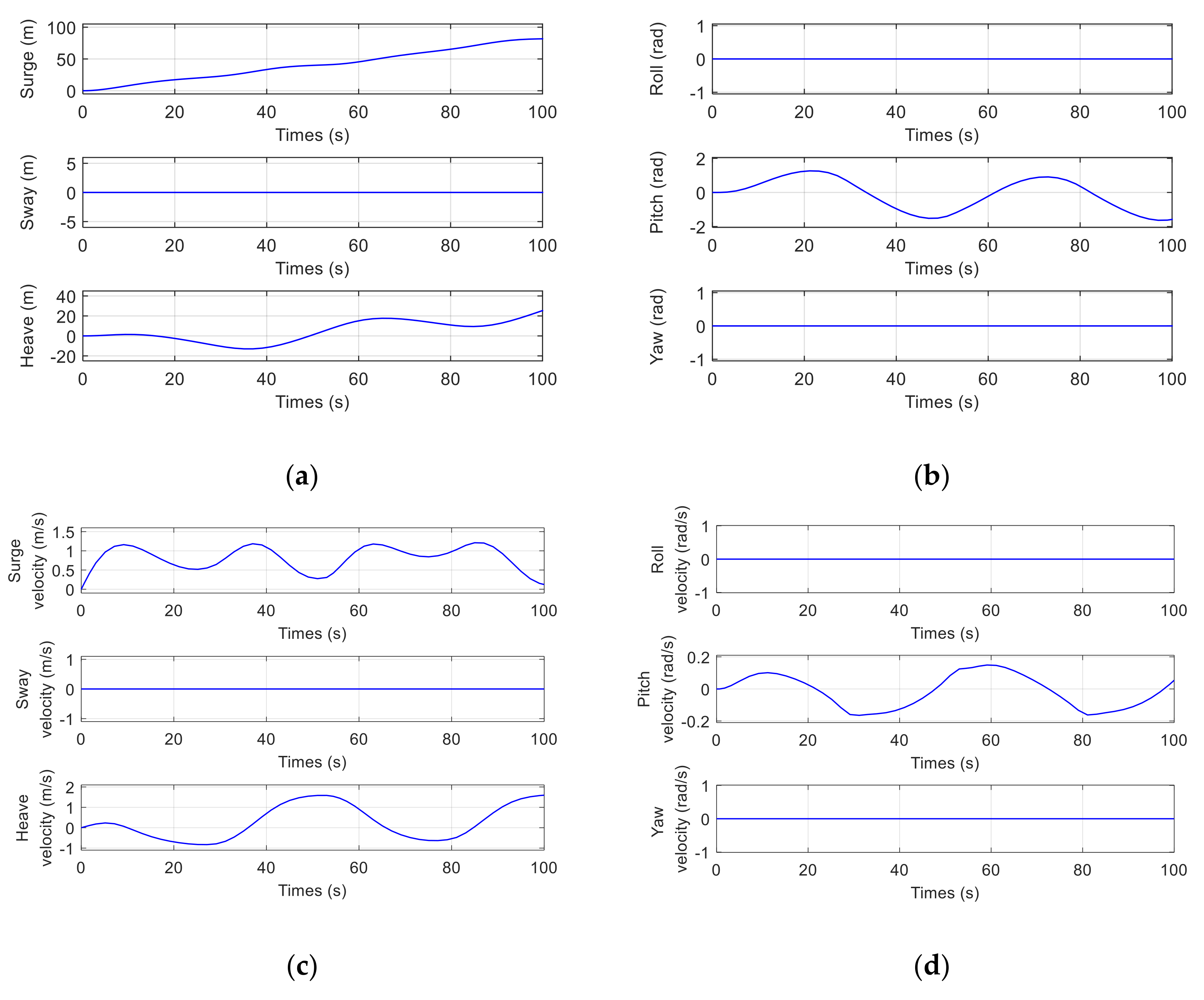
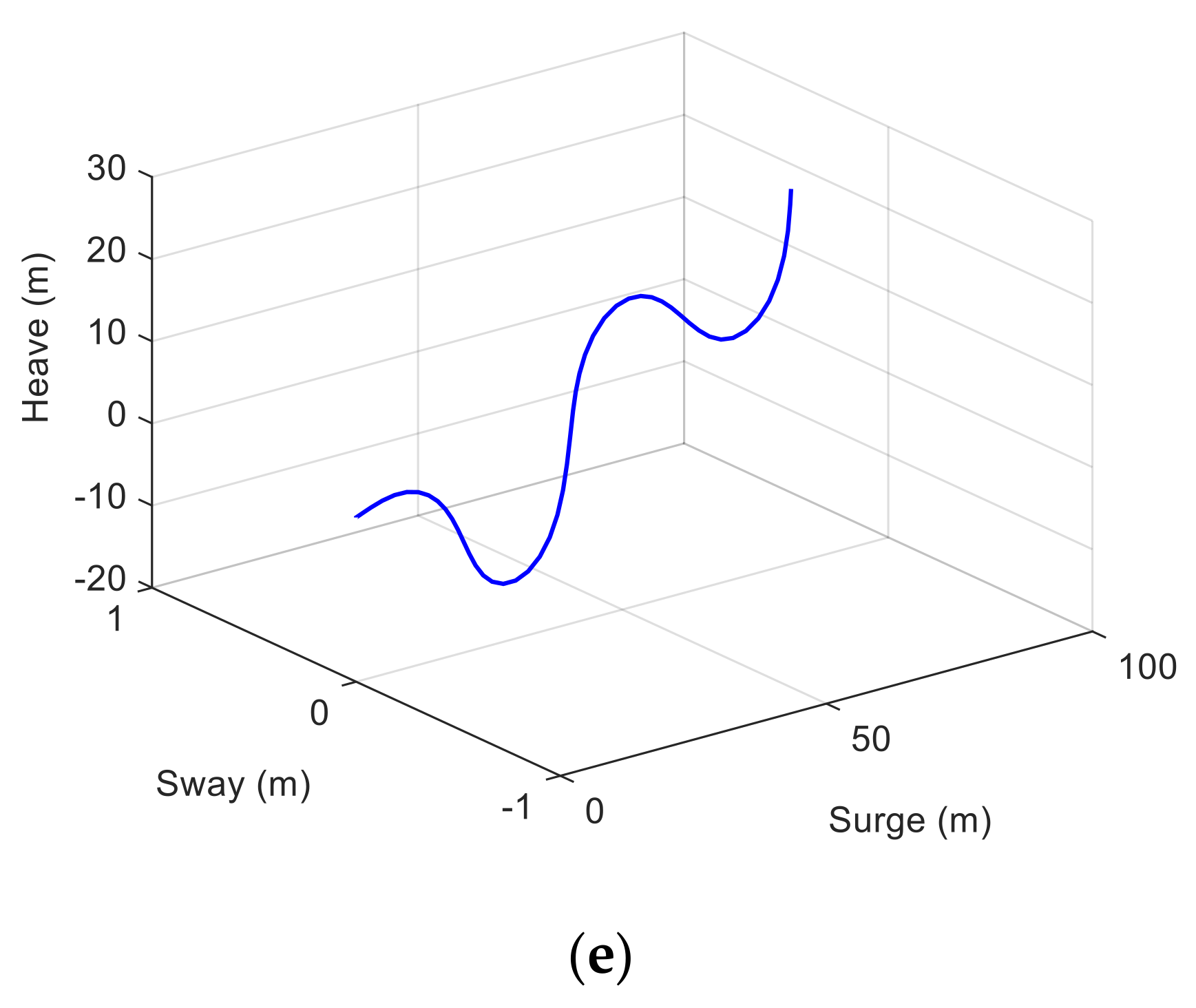
4.1. Model Simulation
4.2. Model and Control Parameters
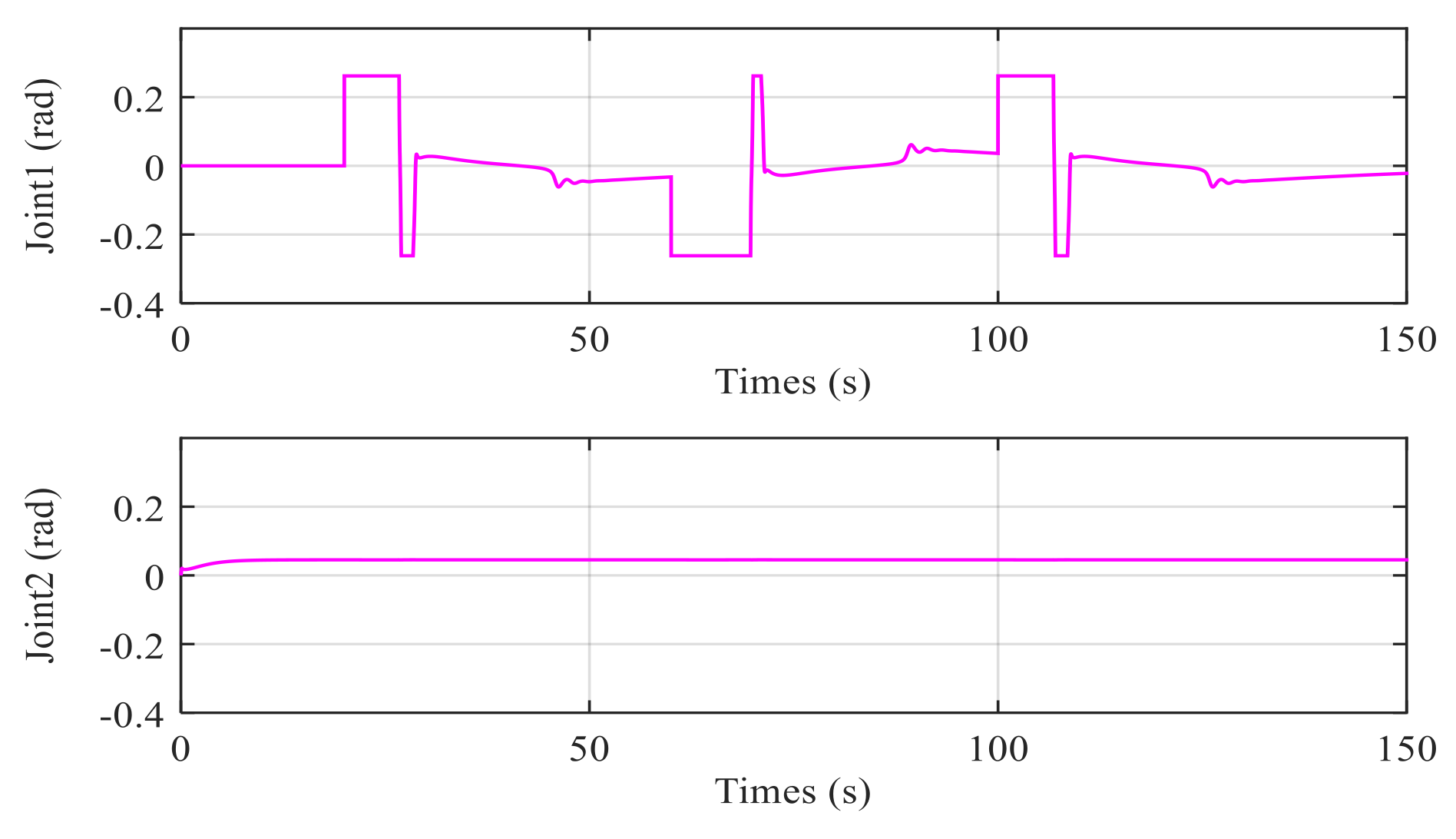
4.3. Control Simulation
5. Conclusions
- (1)
- A new type of MJ-AUV with orthogonal joints structure is proposed that can be used for the rapid exploration of the vertical profile of deep sea.
- (2)
- Considering the imbalance of gravity and buoyancy, a 3D analytical model of the MJ-AUV is established according to Newton’s second law and torque balance principle, which provides a theoretical basis for the study of the MJ-AUV’s 3D motion and model-based controller design.
- (3)
- The LQR decoupling control method based on LESO is proposed. The system is decoupled into pitch and yaw subsystems, and uses linear state observer to estimate and compensate for the total disturbance of each subsystem. LQR is used to achieve the optimal linear feedback control gain according to the expected input and output effects. It solves the problem of strong system coupling and makes the parameter tuning work more efficient.
- (4)
- The simulation results show that the improved control algorithm has the advantages of low overshot and high control precision, and the controller has the advantages of small computation, independence of the precise model of the system, and has a good prospect of engineering application.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diversion Cabin | Navigation/Control Cabin | Propulsion Cabin | |
|---|---|---|---|
| 0.5625 | 0.775 | 0.6625 | |
| 46.5 | 113.6 | 46 | |
| 0.0471 | 0.1152 | 0.0467 | |
| 1.129 | 1.938 | 1.314 | |
| 7.623 | 29.281 | 8.877 | |
| 7.645 | 29.447 | 8.999 | |
| 10.05 | 0 | 22.73 | |
| 75.53 | 126.5 | 177.5 | |
| 75.53 | 126.5 | 159.8 | |
| 0.3404 | 0 | 0.5009 | |
| 6.272 | 12.61 | 4.192 | |
| 6.272 | 12.61 | 7.351 | |
| 12.44 | 17.30 | 13.40 | |
| 57.71 | 109.13 | 82.42 | |
| 57.71 | 109.13 | 87.97 | |
| 0 | 0 | 0.47 | |
| 2.6 | 16.37 | 7.85 | |
| 2.6 | 16.37 | 7.44 | |
| Other Parameters | , , , , , . | ||
References
- Zereik, E.; Bibuli, M.; Mišković, N.; Ridao, P.; Pascoal, A. Challenges and Future Trends in Marine Robotics. Annu. Rev. Control 2018, 46, 350–368. [Google Scholar] [CrossRef]
- Rudnick, D.L. Ocean Research Enabled by Underwater Gliders. Annu. Rev. Mar. Sci. 2016, 8, 519–541. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Yang, S.; Wang, Y.; Liang, Y.; Wang, S.; Zhang, L. Optimization Design of Neutrally Buoyant Hull for Underwater Gliders. Ocean Eng. 2020, 209, 107512. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their Past, Present and Future Contributions to the Advancement of Marine Geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Xia, D. Dynamic Modeling of a Fishlike Robot with Undulatory Motion Based on Kane’s Method. J. Mech. Eng. 2009, 45, 41–49. [Google Scholar] [CrossRef]
- Tang, J.; Li, B.; Chang, J.; Wang, C. Design and Dynamic Model of Underwater Gliding Snake-like Robot. J. Huazhong Univ. Sci. Technol. Nat. Sci. 2018, 12, 89–94. [Google Scholar] [CrossRef]
- Kelasidi, E.; Liljeback, P.; Pettersen, K.Y.; Gravdahl, J.T. Innovation in Underwater Robots: Biologically Inspired Swimming Snake Robots. IEEE Robot. Autom. Mag. 2016, 23, 44–62. [Google Scholar] [CrossRef] [Green Version]
- Kelasidi, E.; Pettersen, K.Y.; Gravdahl, J.T.; Liljeback, P. Modeling of Underwater Snake Robots. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4540–4547. [Google Scholar]
- Kelasidi, E.; Pettersen, K.Y.; Gravdahl, J.T. Modeling of Underwater Snake Robots Moving in a Vertical Plane in 3D. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 266–273. [Google Scholar]
- Koopaee, M.J.; Pretty, C.; Classens, K.; Chen, X. Dynamical Modeling and Control of Modular Snake Robots with Series Elastic Actuators for Pedal Wave Locomotion on Uneven Terrain. J. Mech. Des. 2020, 142. [Google Scholar] [CrossRef]
- Yu, J.; Liu, L.; Tan, M. Dynamic Modeling of Multi-Link Swimming Robot Capable of 3-D Motion. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 1322–1327. [Google Scholar]
- Kohl, A.M.; Pettersen, K.Y.; Kelasidi, E.; Gravdahl, J.T. Planar Path Following of Underwater Snake Robots in the Presence of Ocean Currents. IEEE Robot. Autom. Lett. 2016, 1, 383–390. [Google Scholar] [CrossRef] [Green Version]
- Kelasidi, E.; Liljeback, P.; Pettersen, K.Y.; Gravdahl, J.T. Integral Line-of-Sight Guidance for Path Following Control of Underwater Snake Robots: Theory and Experiments. IEEE Trans. Robot. 2017, 33, 610–628. [Google Scholar] [CrossRef] [Green Version]
- Fischer, N.; Hughes, D.; Walters, P.; Schwartz, E.M.; Dixon, W.E. Nonlinear RISE-Based Control of an Autonomous Underwater Vehicle. IEEE Trans. Robot. 2014, 30, 845–852. [Google Scholar] [CrossRef] [Green Version]
- Zhao, S.; Yuh, J.; Choi, S.K. Adaptive DOB Control for AUVs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA ’04), New Orleans, LA, USA, 26 April–1 May 2004; pp. 4899–4904. [Google Scholar]
- Wu, N.; Wu, C.; Ge, T.; Yang, D.; Yang, R. Pitch Channel Control of a REMUS AUV with Input Saturation and Coupling Disturbances. Appl. Sci. 2018, 8, 253. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Wu, C.; Wang, J.; Ge, T. Modeling and Control of Negative-Buoyancy Tri-Tilt-Rotor Autonomous Underwater Vehicles Based on Immersion and Invariance Methodology. Appl. Sci. 2018, 8, 1150. [Google Scholar] [CrossRef] [Green Version]
- Kang, S.; Rong, Y.; Chou, W. Antidisturbance Control for AUV Trajectory Tracking Based on Fuzzy Adaptive Extended State Observer. Sensors 2020, 20, 7084. [Google Scholar] [CrossRef]
- Yangyang, Z.; Li’e, G.; Weidong, L.; Le, L. Research on Control Method of AUV Terminal Sliding Mode Variable Structure. In Proceedings of the 2017 International Conference on Robotics and Automation Sciences (ICRAS), Hong Kong, China, 26–29 August 2017; pp. 88–93. [Google Scholar]
- Rodriguez, J.; Castañeda, H.; Gordillo, J.L. Design of an Adaptive Sliding Mode Control for a Micro-AUV Subject to Water Currents and Parametric Uncertainties. JMSE 2019, 7, 445. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Liu, Y.; Zheng, H.; Wang, S.; Ma, J.; Liu, Y. A Self-Searching Optimal ADRC for the Pitch Angle Control of an Underwater Thermal Glider in the Vertical Plane Motion. Ocean Eng. 2018, 159, 98–111. [Google Scholar] [CrossRef]
- Zhang, Y.; Deng, H.; Li, Y. Depth Control of AUV Using Sliding Mode Active Disturbance Rejection Control. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 300–305. [Google Scholar]
- Shen, Y.; Shao, K.; Ren, W.; Liu, Y. Diving Control of Autonomous Underwater Vehicle Based on Improved Active Disturbance Rejection Control Approach. Neurocomputing 2016, 173, 1377–1385. [Google Scholar] [CrossRef]
- Wang, T.; Wang, J.; Wu, C.; Zhao, M.; Ge, T. Disturbance-Rejection Control for the Hover and Transition Modes of a Negative-Buoyancy Quad Tilt-Rotor Autonomous Underwater Vehicle. Appl. Sci. 2018, 8, 2459. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; He, B.; Yin, Q.; Mu, X.; Zhang, J.; Wan, J.; Wang, D.; Shen, Y. Fuzzy Optimized MFAC Based on ADRC in AUV Heading Control. Electronics 2019, 8, 608. [Google Scholar] [CrossRef] [Green Version]
- Anderlini, E.; Parker, G.G.; Thomas, G. Docking Control of an Autonomous Underwater Vehicle Using Reinforcement Learning. Appl. Sci. 2019, 9, 3456. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Zhang, C.; Zhang, G.; Xu, H.; Ran, X. Three-Dimensional Path Tracking Control of Autonomous Underwater Vehicle Based on Deep Reinforcement Learning. JMSE 2019, 7, 443. [Google Scholar] [CrossRef] [Green Version]
- Sands, T. Development of Deterministic Artificial Intelligence for Unmanned Underwater Vehicles (UUV). JMSE 2020, 8, 578. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and Bandwidth-Parameterization Based Controller Tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar]
- Sudano, J.J. A Transformation of Unit Vectors to Simplify Derivations between Earth-Centered and Local North-East-and-up on an Ellipsoid Earth. In Proceedings of the IEEE 1995 National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 22–26 May 1995; Volume 2, pp. 745–747. [Google Scholar]
- Gao, Z. Active Disturbance Rejection Control: A Paradigm Shift in Feedback Control System Design. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 2399–2405. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, L.; Meng, Q.; Zhang, H. 3-Dimensional Modeling and Attitude Control of Multi-Joint Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2021, 9, 307. https://doi.org/10.3390/jmse9030307
Yu L, Meng Q, Zhang H. 3-Dimensional Modeling and Attitude Control of Multi-Joint Autonomous Underwater Vehicles. Journal of Marine Science and Engineering. 2021; 9(3):307. https://doi.org/10.3390/jmse9030307
Chicago/Turabian StyleYu, Lin, Qinghao Meng, and Hongwei Zhang. 2021. "3-Dimensional Modeling and Attitude Control of Multi-Joint Autonomous Underwater Vehicles" Journal of Marine Science and Engineering 9, no. 3: 307. https://doi.org/10.3390/jmse9030307
APA StyleYu, L., Meng, Q., & Zhang, H. (2021). 3-Dimensional Modeling and Attitude Control of Multi-Joint Autonomous Underwater Vehicles. Journal of Marine Science and Engineering, 9(3), 307. https://doi.org/10.3390/jmse9030307