
Motion Pattern Optimization and Energy Analysis for Underwater Glider Based on the Multi-Objective Artificial Bee Colony Method



Abstract
:1. Introduction
2. Underwater Glider Dynamic Modeling
2.1. Model Derivations
2.2. Hydrodynamic Forces
3. Motion Pattern and Energy Consumption Analysis
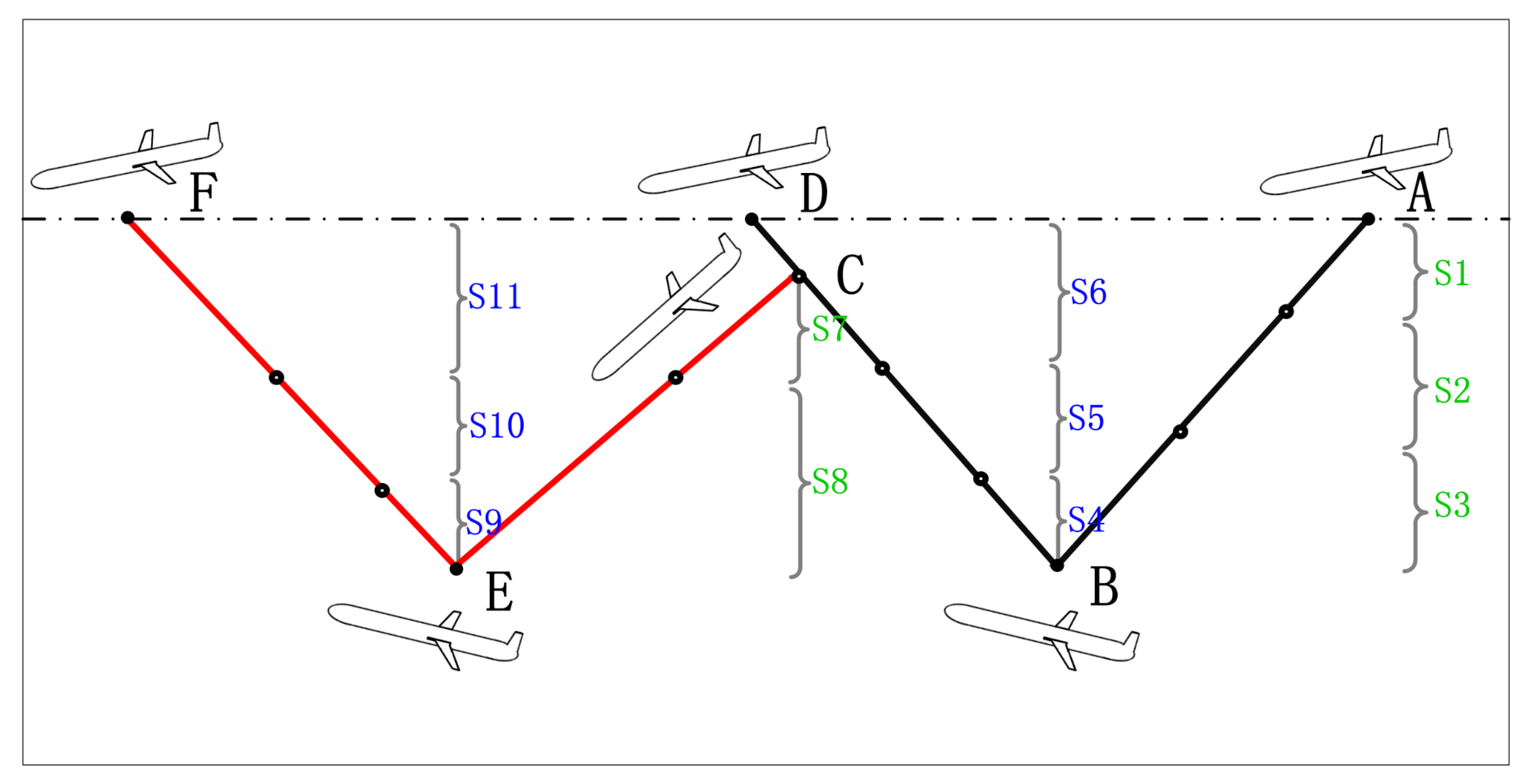
3.1. Motion Pattern Discussion
3.2. Energy Consumption Analysis
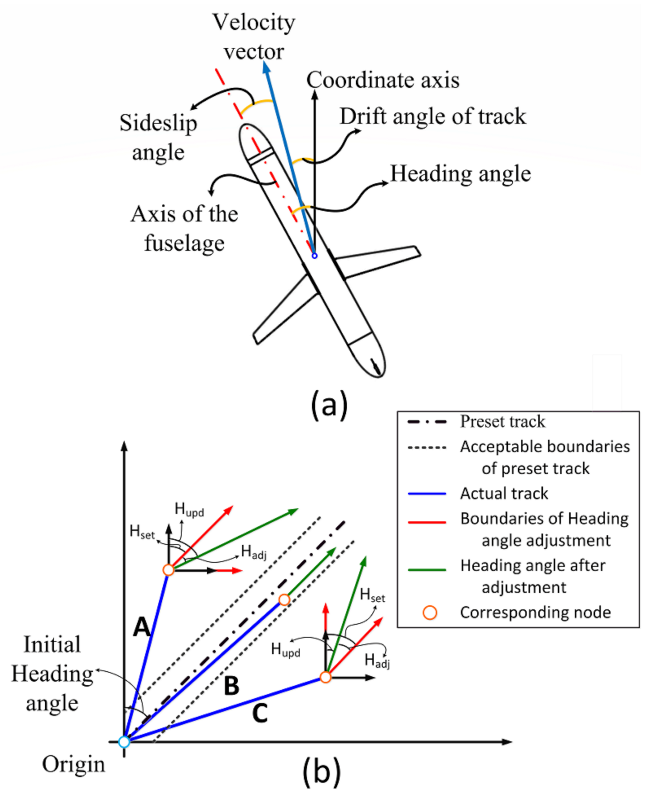
3.3. Discussion of Heading Control Deficiencies on a Horizontal Level
4. Optimization Problem and Method
4.1. Glider Motion Optimization Problem
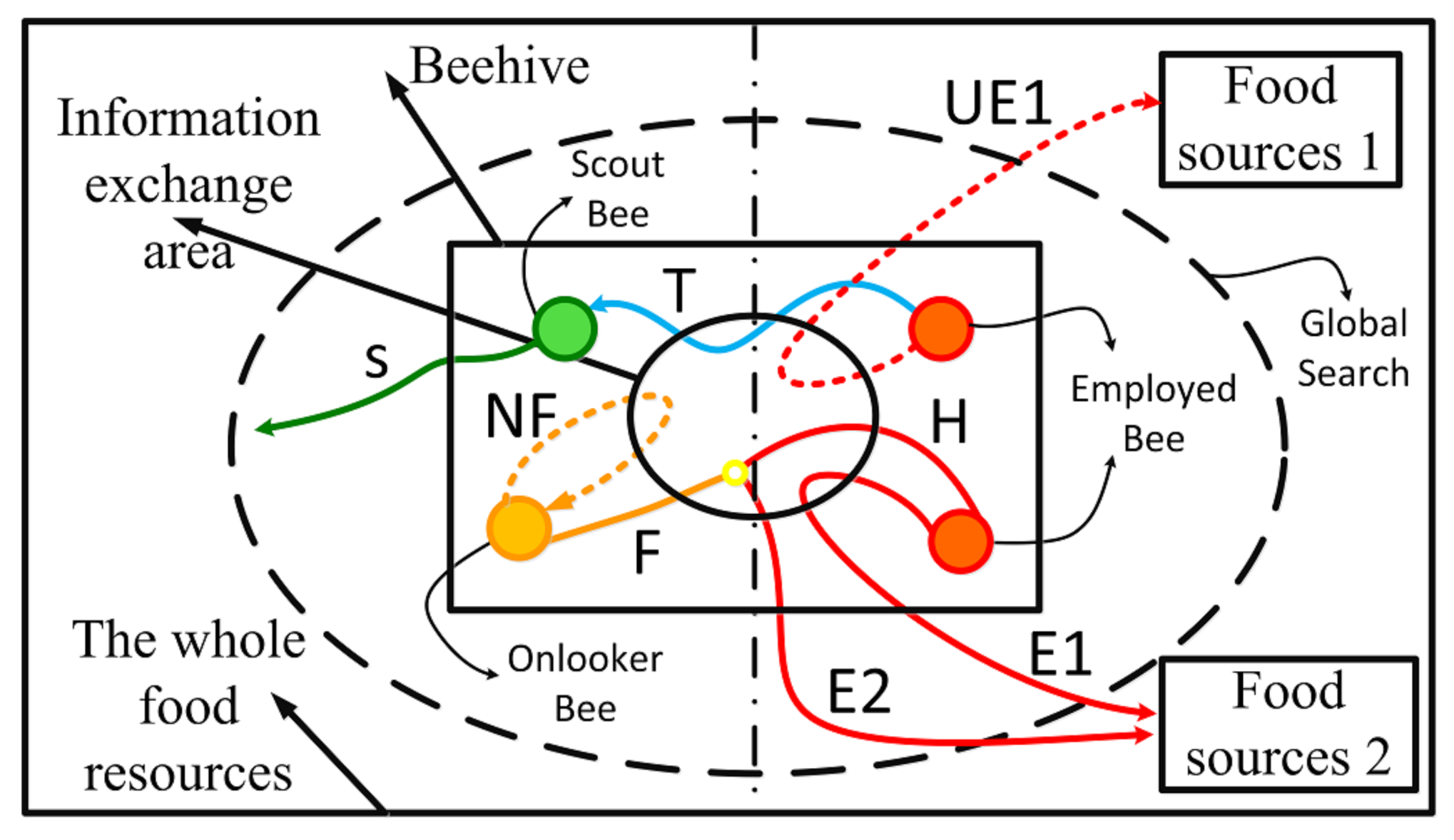
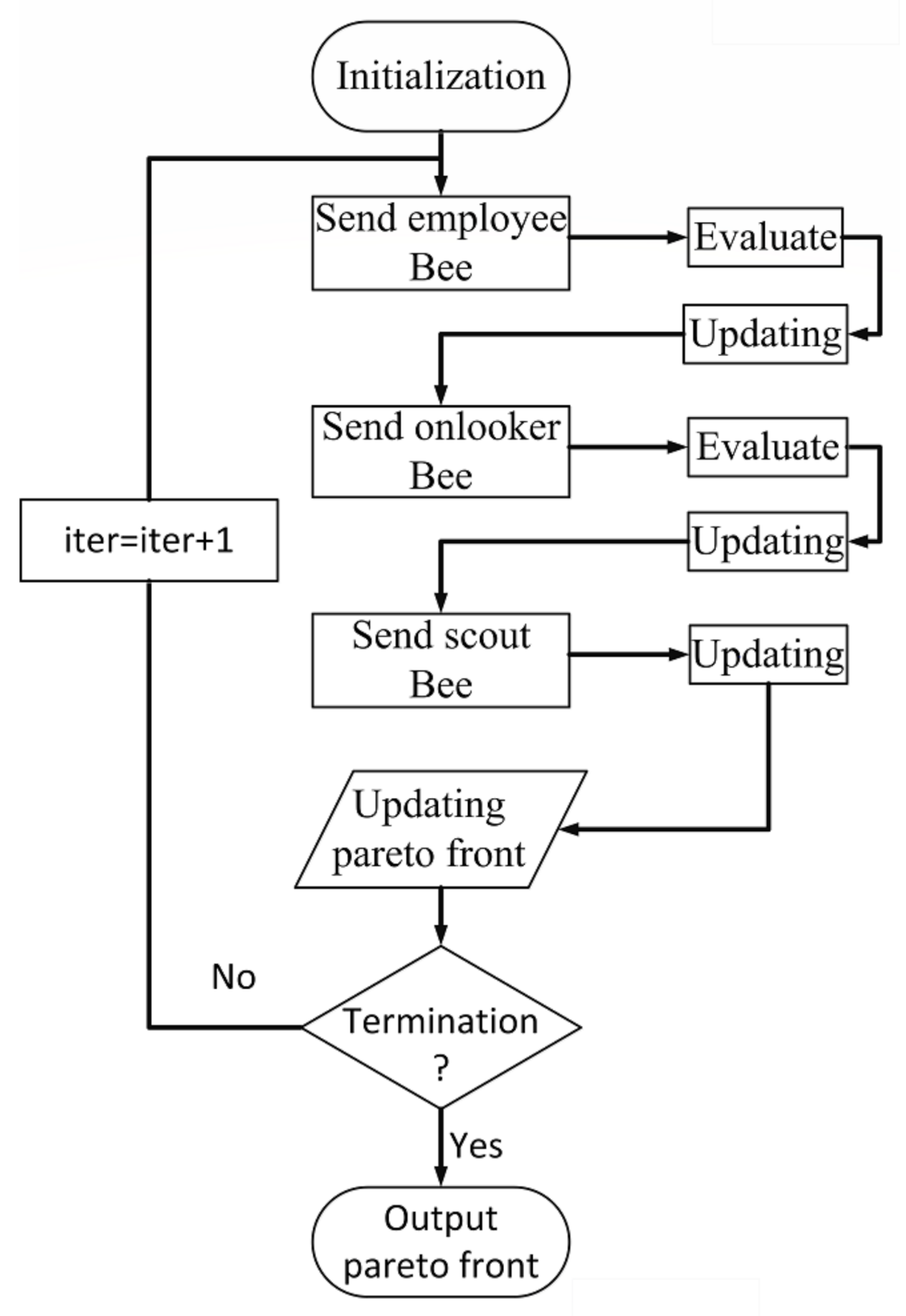
4.2. Multi-Objective Artificial Bee Colony Algorithm
5. Numerical Simulation Results and Experiments Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| the body frame | |
| the inertial frame | |
| momentum and momentum distance of the system and battery mass | |
| translation velocity in the body frame | |
| angular velocity in the body frame | |
| glider position in the inertial frame | |
| water flow damping mass | |
| mass of the static block | |
| position of the static block in body frame | |
| fluid velocity | |
| mass of the semi-cylindrical movable block | |
| position of the semi-cylindrical movable block in the body frame | |
| net buoyancy | |
| inertia matrix of the semi-cylindrical movable block in the body frame | |
| mass of the adjustable net buoyancy | |
| position of the net buoyancy in the body frame | |
| force point of in the inertial frame | |
| translation velocity of battery mass in the body frame | |
| translation velocity of battery mass in the body frame | |
| translational momentum of battery mass in the inertial frame | |
| angular momentum of battery mass in the inertial frame | |
| slide force | |
| the attack angle | |
| force generated by battery mass | |
| torque generated by battery mass | |
| lift force | |
| the flip angle | |
| the generalized momentum of the glider in body frame | |
| momentum derivation with respect to time | |
| kinetic energy of battery mass | |
| conversion matrix between body frame and inertial frame | |
| conversion matrix between body frame and velocity frame | |
| translational momentum of the glider in the inertial frame | |
| angular momentum of the glider in the inertial frame | |
| P | translational momentum of the glider in the body frame |
| angular momentum of the glider in the body frame | |
| force of the shell on the battery block | |
| torque of the shell to the battery block | |
| drag force | |
| total external force generated by the wings | |
| total external moment generated by the wings | |
| F | generalized force on glider |
| T | generalized torque on glider |
| m | mass of the displaced fluid by a glider |
| force point of in the inertial frame | |
| translational momentum of battery mass in the body frame | |
| angular momentum of battery mass in the body frame | |
| hydrodynamic force | |
| hydrodynamic torque | |
| coefficients of L | |
| coefficients of SF | |
| coefficients of D | |
| coefficients of | |
| coefficients of | |
| coefficients of |
References
- Rudnick, D.L. Ocean research enabled by underwater gliders. Annu. Rev. Mar. Sci. 2016, 8, 519–541. [Google Scholar] [CrossRef] [PubMed]
- Todd, R.E.; Rudnick, D.L.; Sherman, J.T.; Owens, W.B.; George, L. Absolute velocity estimates from autonomous underwater gliders equipped with Doppler current profilers. J. Atmos. Ocean. Technol. 2017, 34, 309–333. [Google Scholar] [CrossRef]
- Wagawa, T.; Kawaguchi, Y.; Igeta, Y.; Honda, N.; Okunishi, T.; Yabe, I. Observations of oceanic fronts and water-mass properties in the central Japan Sea: Repeated surveys from an underwater glider. J. Mar. Syst. 2020, 201, 103242. [Google Scholar] [CrossRef]
- Claus, B.; Bachmayer, R. Energy optimal depth control for long range underwater vehicles with applications to a hybrid underwater glider. Auton. Robot. 2016, 40, 1307–1320. [Google Scholar] [CrossRef]
- Inanc, T.; Shadden, S.C.; Marsden, J.E. Optimal trajectory generation in ocean flows. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 674–679. [Google Scholar]
- Zamuda, A.; Sosa, J.D.H. Differential evolution and underwater glider path planning applied to the short-term opportunistic sampling of dynamic mesoscale ocean structures. Appl. Soft Comput. 2014, 24, 95–108. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Y.; Yang, S.; Wang, S.; Yang, M. Sensitivity analysis and parameter optimization of energy consumption for underwater gliders. Energy 2020, 191, 116506. [Google Scholar] [CrossRef]
- Zhou, Y.; Yu, J.; Wang, X. Path planning method of underwater glider based on energy consumption model in current environment. In Lecture Notes in Computer Science, Proceedings of the International Conference on Intelligent Robotics and Applications, Guangzhou, China, 17–20 December 2014; Springer: Cham, Switzerland, 2014; pp. 142–152. [Google Scholar]
- Fernández-Perdomo, E.; Hernández-Sosa, D.; Isern-González, J.; Cabrera-Gámez, J.; Dominguez-Brito, A.C.; Prieto-Marañón, V. Single and multiple glider path planning using an optimization-based approach. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011; pp. 1–10. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Akbari, R.; Hedayatzadeh, R.; Ziarati, K.; Hassanizadeh, B. A multi-objective artificial bee colony algorithm. Swarm Evol. Comput. 2012, 2, 39–52. [Google Scholar] [CrossRef]
- Kishor, A.; Singh, P.K.; Prakash, J. NSABC: Non-dominated sorting based multi-objective artificial bee colony algorithm and its application in data clustering. Neurocomputing 2016, 216, 514–533. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: NSGA-II. In Lecture Notes in Computer Science, Proceedings of the International Conference on Parallel Problem Solving from Nature, Paris, France, 18–20 September 2000; Springer: Cham, Switzerland, 2000; pp. 849–858. [Google Scholar]
- Li, J.Q.; Han, Y.Q. A hybrid multi-objective artificial bee colony algorithm for flexible task scheduling problems in cloud computing system. Clust. Comput. 2020, 23, 2483–2499. [Google Scholar] [CrossRef]
- Mahmoodabadi, M.J.; Shahangian, M.M. A new multi-objective artificial bee colony algorithm for optimal adaptive robust controller design. IETE J. Res. 2019, 1–14. [Google Scholar] [CrossRef]
- Gonzalez-Sanchez, B.; Vega-Rodríguez, M.A.; Santander-Jiménez, S.; Granado-Criado, J.M. Multi-Objective Artificial Bee Colony for designing multiple genes encoding the same protein. Appl. Soft Comput. 2019, 74, 90–98. [Google Scholar] [CrossRef]
- Seghir, F.; Khababa, A.; Semchedine, F. An interval-based multi-objective artificial bee colony algorithm for solving the web service composition under uncertain QoS. J. Supercomput. 2019, 75, 5622–5666. [Google Scholar] [CrossRef]
- Wang, S.X.; Sun, X.J.; Wang, Y.H.; Wu, J.G.; Wang, X.M. Dynamic modeling and motion simulation for a winged hybrid-driven underwater glider. China Ocean Eng. 2011, 25, 97–112. [Google Scholar] [CrossRef]
- Yu, P.; Zhao, Y.; Wang, T.; Zhou, H.; Su, S.; Zhen, C. Steady-state spiral motion simulation and turning speed analysis of an underwater glider. In Proceedings of the 2017 4th International Conference on Information, Cybernetics and Computational Social Systems (ICCSS), Dalian, China, 24–26 July 2017; pp. 372–377. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | I/mA | Time Symbol | Expression |
|---|---|---|---|
| 208.8 | |||
| 161.0 | |||
| 1.2 | |||
| 356.2 | |||
| 161.0 | |||
| 1.2 | |||
| 27.1 | |||
| 185.0 | |||
| 1.2 | |||
| 1.2 |
| Depth | Depth | Pitch | Colony Size | Maximum Iteration | Trail | |
|---|---|---|---|---|---|---|
| 500 m | 450 m | 23 deg | [5 deg, 10 deg] | 1000 | 100 | 30 |
| n | R | e | Energy Remains | Promotion on Range | Decrease on Heading Error | ||
|---|---|---|---|---|---|---|---|
| 1 | manual | 205.347 | 1.910 | 0.979 | 0.407% | 0 | 0 |
| 3 | 17.146 | 358.233 | 0.578 | 0.969 | 0.491% | 74.452% | 69.738% |
| 5 | 7.013 | 366.054 | 0.837 | 0.965 | 0.514% | 78.261% | 56.178% |
| 6 | 8.318 | 371.997 | 1.048 | 0.957 | 0.448% | 81.115% | 45.130% |
| 9 | 9.625 | 363.448 | 1.387 | 0.941 | 0.724% | 76.992% | 27.382% |
| 11 | 13.083 | 374.882 | 1.281 | 0.936 | 0.378% | 82.560% | 32.932% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, W.; Zang, W.; Liu, C.; Guo, T.; Nie, Y.; Song, D. Motion Pattern Optimization and Energy Analysis for Underwater Glider Based on the Multi-Objective Artificial Bee Colony Method. J. Mar. Sci. Eng. 2021, 9, 327. https://doi.org/10.3390/jmse9030327
Sun W, Zang W, Liu C, Guo T, Nie Y, Song D. Motion Pattern Optimization and Energy Analysis for Underwater Glider Based on the Multi-Objective Artificial Bee Colony Method. Journal of Marine Science and Engineering. 2021; 9(3):327. https://doi.org/10.3390/jmse9030327
Chicago/Turabian StyleSun, Weicheng, Wenchuan Zang, Chao Liu, Tingting Guo, Yunli Nie, and Dalei Song. 2021. "Motion Pattern Optimization and Energy Analysis for Underwater Glider Based on the Multi-Objective Artificial Bee Colony Method" Journal of Marine Science and Engineering 9, no. 3: 327. https://doi.org/10.3390/jmse9030327
APA StyleSun, W., Zang, W., Liu, C., Guo, T., Nie, Y., & Song, D. (2021). Motion Pattern Optimization and Energy Analysis for Underwater Glider Based on the Multi-Objective Artificial Bee Colony Method. Journal of Marine Science and Engineering, 9(3), 327. https://doi.org/10.3390/jmse9030327