3.1. The Numerical Setups
The test cases adopted from [
28] were analyzed for the buoy positioned with three mooring configurations typically appropriate for WECs.
Figure 4 shows an overview of the setup and the adopted mooring configurations, comprising the standard catenary system (CAT), the compact (small sea bed footprint) configuration consisting of synthetic cables and floaters (CON1), and the compact configuration made up of synthetic cables, floaters, and clump weights (CON2). The setup consisted of a cylindrical buoy moored with three mooring legs spaced 120 deg apart.
Table 1 lists the properties of the buoy without the mooring system. For the studless chain used for experimental testing, the cable diameter used in the simulations considered a volume-equivalent diameter for the mooring chain; that is, the diameter of a cylindrical cable had the same displacement per unit length as the chain [
27].
Table 2 lists the static properties for mooring simulations, namely, equivalent diameter
d, mass density in air
m, mass of the sub floater
mf, volume of the sub floater
Vf, mass of the clump weight
mc, and volume of the clump weight
Vc. The mooring model was formulated for cylindrical elements. Therefore, drag and added mass coefficients used for hydrodynamic force calculations needed to be adjusted accordingly.
Table 3 lists the associated hydrodynamic properties adopted for the mooring simulations;
Table 4, the resulting mooring tensions at the buoy’s rest position.
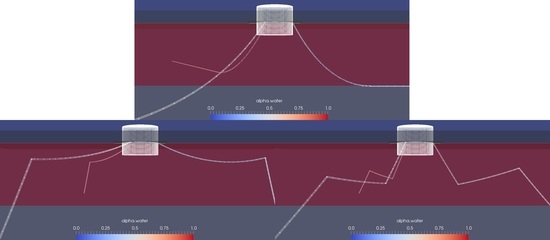
A rectangular box shown in
Figure 5 defined the computational domain, which consisted of three domain layers. One uniform high-resolution middle layer, extending below and above the calm water level, encapsulated minimum and maximum surface elevations. The two other layers extended from the clam water level to the bottom and the top of the domain. The gridding became coarser towards to the outlet boundary to dampen wave reflections and to significantly reduce the computational effort for further simulations in waves. The distance from the inlet boundary to the buoy was about 5 D
B, where D
B is the diameter of the buoy. The distance from the outlet boundary to the buoy was about 10 D
B. The width of the wave tank was 6 D
B, and the water depth was the same as in the experiments.
Figure 6 shows a sample grid topology. Grids were refined towards the free surface and towards the buoy, but their refinement was constant in the vertical direction.
3.2. Discretization Uncertainties
Numerical results from field methods are sensitive to spatial and temporal discretization uncertainties. Specifically, results from CFD simulations are subject to discretization uncertainties, iterative uncertainties, statistical uncertainties, and residual uncertainties. As our residual uncertainties turned out to be two orders of magnitude less than our discretization uncertainties, we neglected to determine the iterative uncertainties [
29]. We also did not consider statistical uncertainties, because our numerically simulated decay motions resulted in time-accurate oscillating amplitudes. Therefore, we only addressed discretization uncertainties.
We started with the decaying heave motion. For our temporal uncertainty study, we adopted a refinement factor of
and defined three time-step sizes based on a system’s natural heave period
T, with
,
,
. A uniform refinement factor of
was specified for all spatial directions. Consequently, the ratios specifying the number of cells for the coarse grid
, the medium grid
, and the fine grid
were adequately matched with the factor
.
Table 5 lists these cell grid ratios and the associated number of cells for each grid.
According to the International Towing Tank Conference (ITTC) [
30], the discretization uncertainty
was expressed as follows:
where
and
are uncertainties of time step size and grid size, respectively. The convergence ratio
R, defined as the ratio of the difference between solutions obtained on the fine and medium grids,
, and the difference of these solutions obtained with the medium and coarse time step sizes,
, was calculated as follows:
The asymptotic analysis from subfigures (b) and (c) of
Figure 7 shows that monotonic convergence (
) was achieved for both target solutions, i.e., for amplitudes as well as for periods. For results with monotonic convergences, the Richardson extrapolation was applied, and the estimated numerical error
and the order of accuracy
p were calculated. With three solutions, only the leading term was estimated, which provided the following one-term estimates:
To better estimate the uncertainties of solutions far from the asymptotic range, the correction factor,
, was adopted [
31] as a measure defining the distance of solutions from the asymptotic range:
where
is an estimate for the limiting order of accuracy as the time-step size approaches zero, and
was adopted here for a second-order accurate method. The numerical error
, the numerical benchmark result
, and the uncertainty
were obtained from as follows:
where
S is the final solution for the verification study. For
significantly less than or greater than unity, the solutions are far away from the asymptotic range, and the numerical uncertainty was then calculated as follows:
Figure 7 plots results of the associated time-step size study for free heave obtained on the medium grid using three different time steps. As hydrodynamic damping and natural periods of the buoy were of interest here, the associated oscillation amplitude over one period, plotted in
Figure 7b, and the corresponding time instances (periods), plotted in
Figure 7c, were considered to be solutions of our verification study. The resulting phases and amplitudes, using a coarse-time step, only slightly differ from each other. Furthermore, phases and amplitudes using medium and fine time-step sizes are nearly the same.
Table 6 lists the obtained time-step uncertainties. For both selected solutions, the convergence factors,
R, are between 0 and 1, indicating that a monotonic convergence was achieved for both solutions. Time-step uncertainties for the amplitude and the period were
and
, respectively. As seen, the difference
between solutions obtained with the medium time-step size and the numerical benchmark solution
was 4.11% for the amplitude and 0.47% for the period. To obtain sufficiently accurate, yet cost effective solutions, we subsequently used the medium time-step size.
To determine the grid uncertainties, we performed simulations on three different grids with the selected medium time-step, and the associated results are plotted in
Figure 8. As seen, the results on different grids are almost identical, although there are small deviations between phases. Following the same procedure, the uncertainties were calculated for the oscillation amplitude and the period, and their results are listed in
Table 7. Both selected solutions achieved a monotonic convergence. The uncertainties of grid size for the amplitude and the period were
and
, respectively. Combining the time-step and grid uncertainties, the associated total discretization uncertainties were
for the oscillation amplitude and
for the period, which verified that our chosen time-step and grid sizes were small enough to obtain reliable predictions. The similar
and
indicate that decreasing the grid size from medium to fine did not significantly improve the results. Therefore, we chose the medium time-step and grid sizes for subsequent decay simulations.
To ensure that the chosen time-step and grid size were also applicable for decay motions in pitch and surge, we again conducted grid sensitivity studies, and the associated time series are plotted in
Figure 9. As seen, the medium time-step and the medium grid size obtained accurate enough results for decay motions in pitch and surge.
3.3. Hydrodynamic Damping
The evaluation of the results comprised not only the buoy motions and mooring forces, but also the systems’ associated natural periods and amounts of hydrodynamic damping. Various techniques exist to obtain hydrodynamic damping from decay tests. Previously [
19], we used an improved P-Q method to estimate linear and quadratic damping of a moored buoy and found the results to be reliable although they were sensitive to data input. Alternately, the equivalent linear damping approach [
32] was adopted in this study, as it is relatively simple and robust. The nonlinear motion equation of a floating unit can be written as follows:
where M is the mass, C is the stiffness, and x,
and
are the motion, velocity and acceleration vectors, respectively. Vector
comprises the external forces, and the higher order nonlinear damping function,
B, can be expressed as follows:
For the free decay tests, considering only the linear damping and no external forces, the equation of motions in non-dimensional form can be rewritten as follows:
where
is the percentage of critical damping, and
is the natural frequency of the motion. Then, Equation (18) then is linear, and its solution can be rewritten as follows:
where
is the initial condition of motion. An exponential fitted curve, adjusted using a least-squares approach and the parameters
a and
b from the exponential fit, can be found as follows:
where
is the damped natural frequency obtained from the oscillations of free decay tests.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}