


Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review



Abstract
:1. Introduction
- Delivering a concise tutorial on autonomous vehicle architectures, design methodologies, safety requisites, and standards insights.
- Formulating a component-centric perspective for architectural paradigms in autonomous vehicles.
- Analyzing pivotal perspectives within safety approaches of autonomous vehicles, underpinned by a software-centric standpoint.
- Categorizing tools, assessment methodologies, and criteria within prevailing software and system design approaches.
- Furnishing an all-encompassing survey detailing pragmatic techniques, persisting challenges, and emerging issues about safety in autonomous vehicles, as per the lens of software considerations.
2. Related Work
- They primarily focused on a single layer or level within the system and software design.
- Some articles must distinguish between vehicle safety and security, leading to unclear studies.
- Given the rapid growth of hardware and software in designing autonomous vehicle systems, these dimensions warrant a comprehensive examination, which needs to be improved in the previous review articles.
3. Research Methodology
3.1. Research Questions
3.2. Selection Criteria
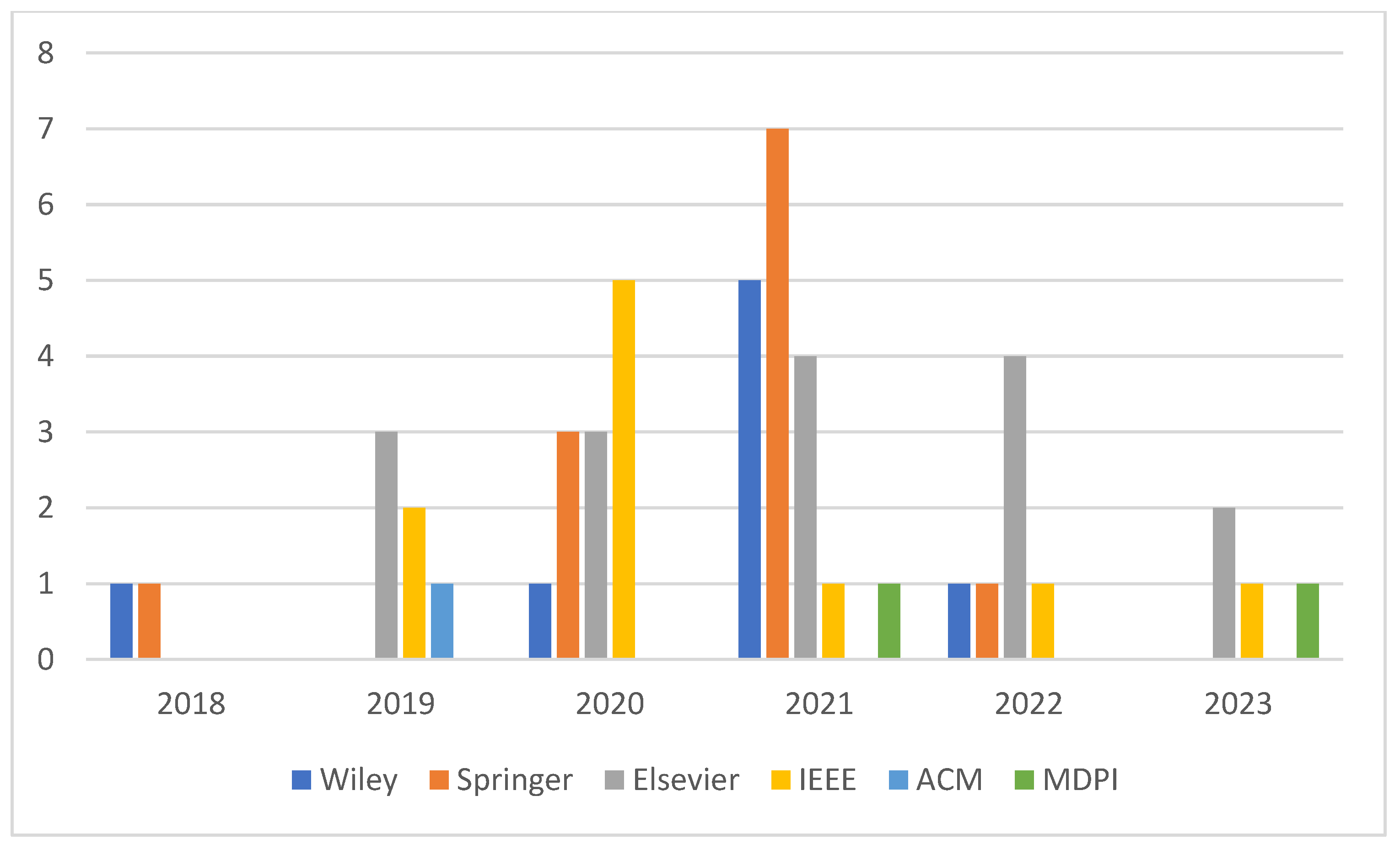
3.3. Data Sources
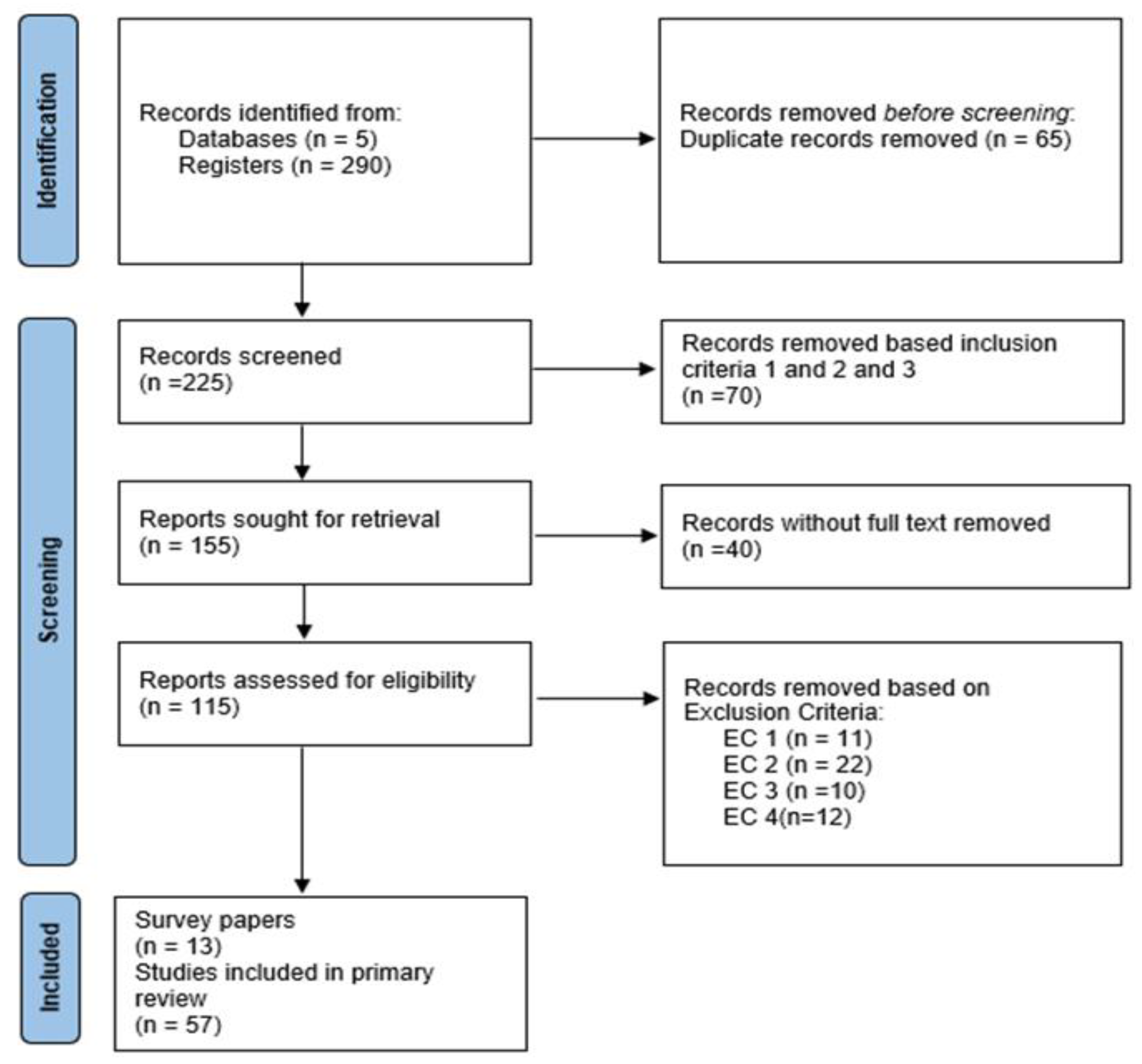
3.4. Search Strategy and Selection Process
4. Background
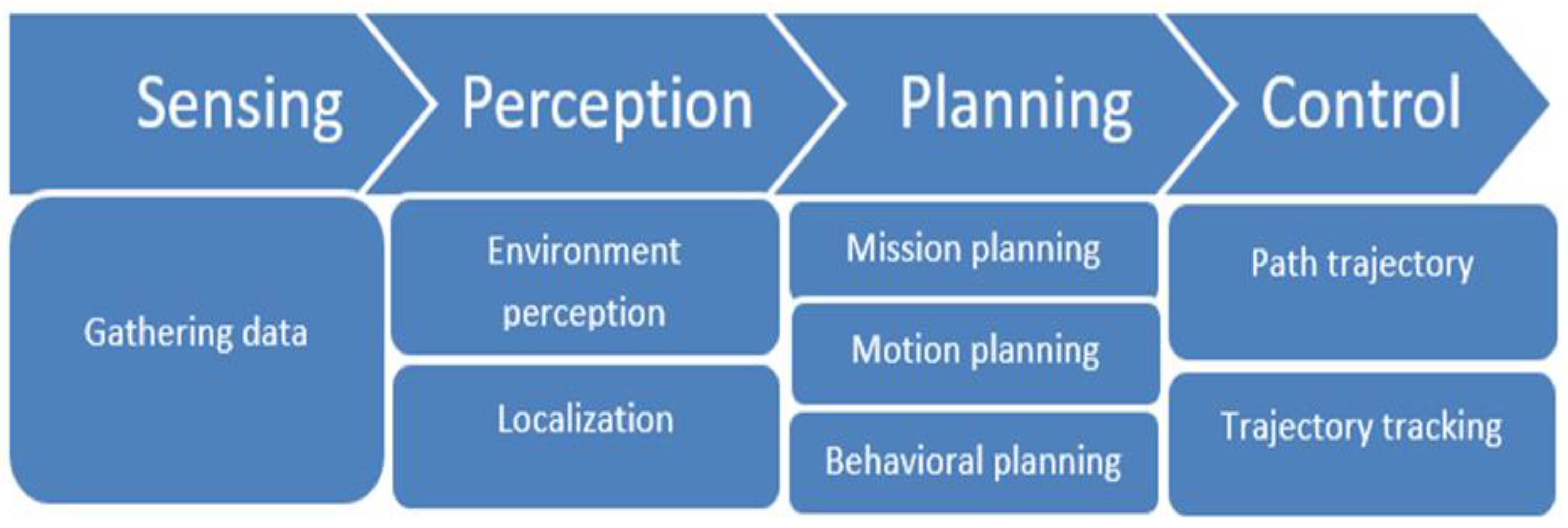
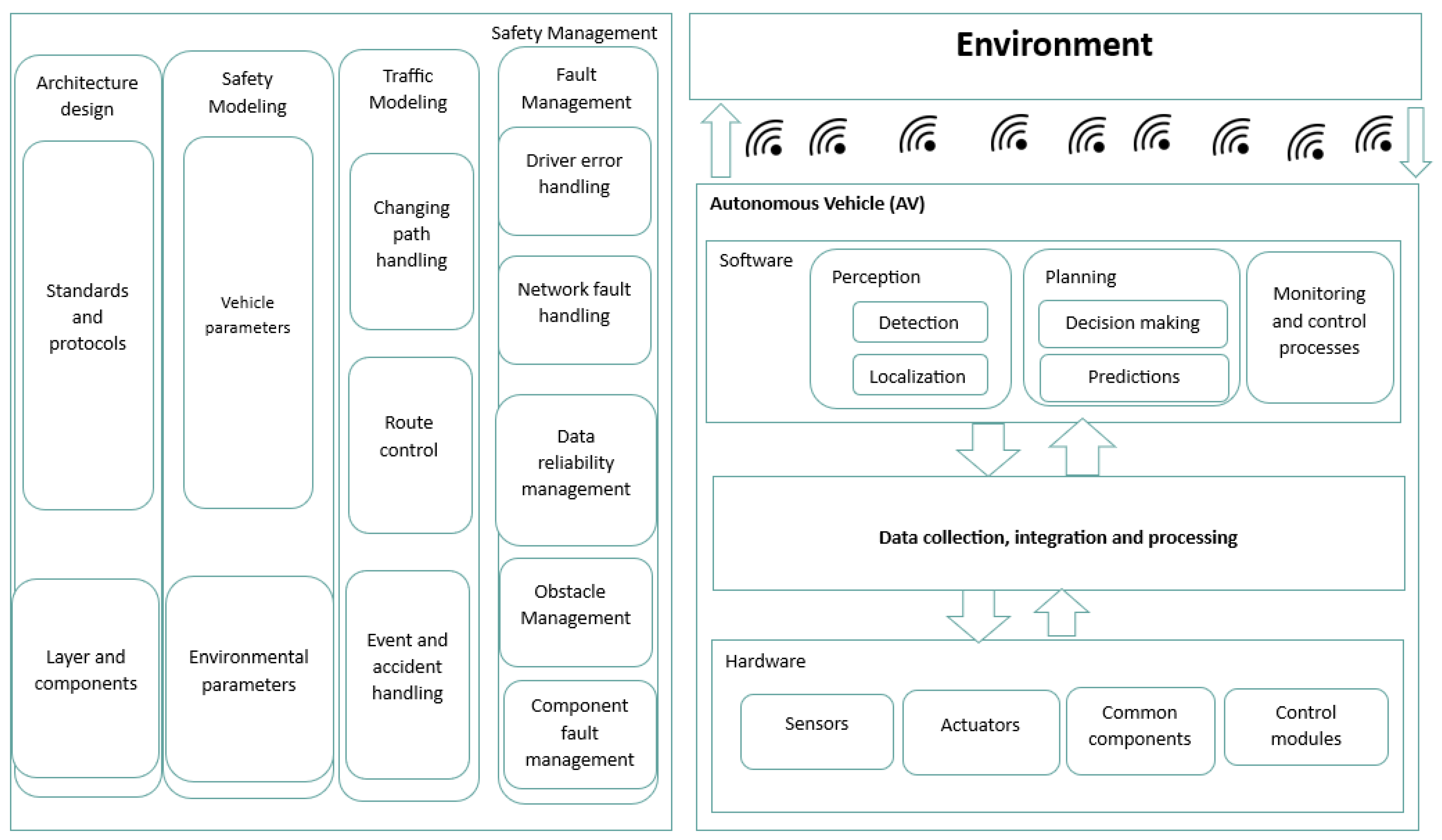
4.1. Autonomous Vehicle Architectural and Design Concepts
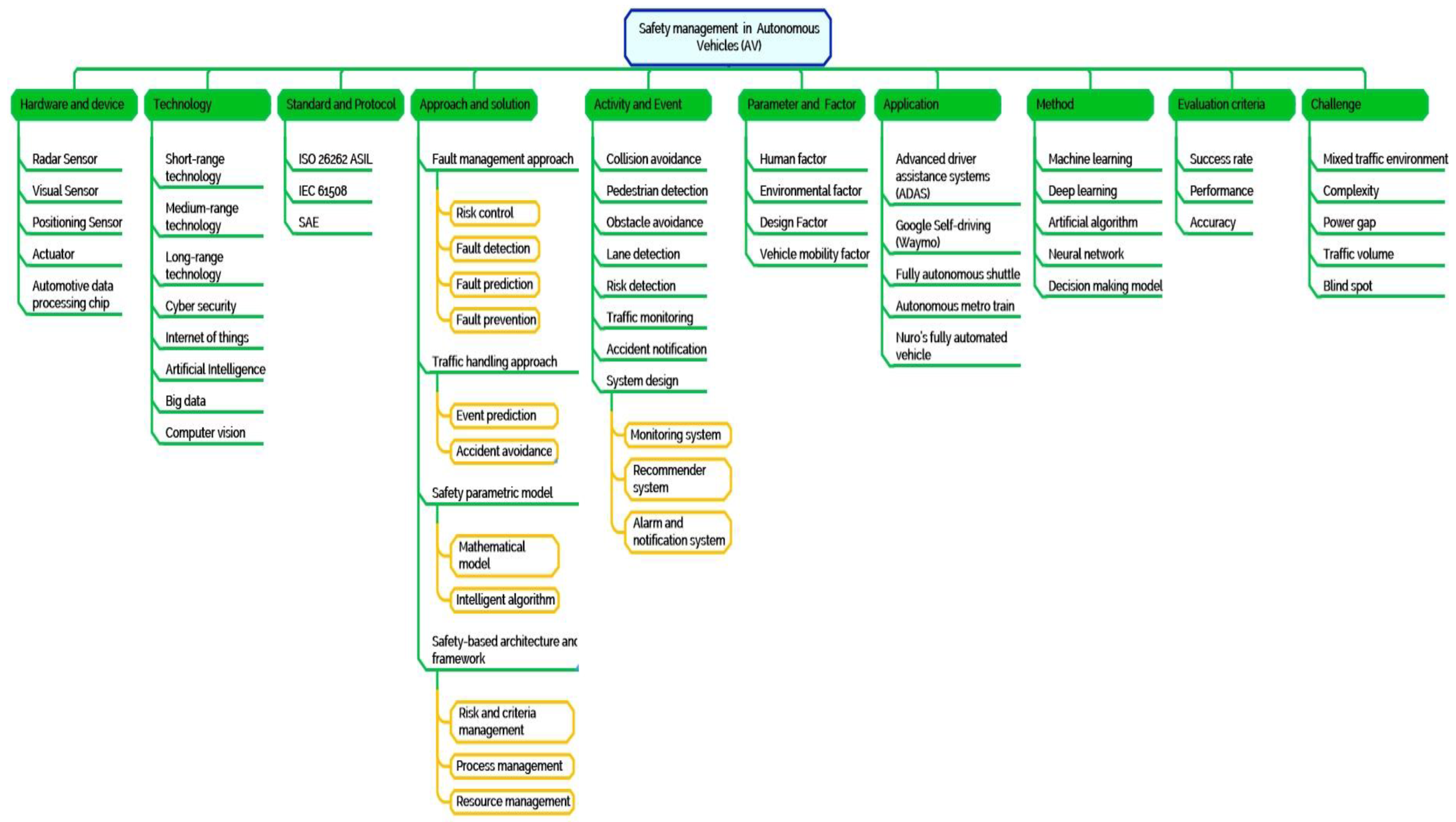
4.1.1. A Viewpoint for Autonomous Vehicles’ Architectural Components
- Model-based development: This method uses graphical models representing the system architecture, functionality, and behavior. The authors used MATLAB/Simulink as the modeling tool and LDRA TBrun as the model testing tool.
- Code generation: This method automatically generates source code from the models. The authors used Embedded Coder as the code generation tool and LDRA Testbed as the code analysis and testing tool.
- Application lifecycle management: This method manages the entire software development process, from requirements to deployment. The authors used codeBeamer ALM as the application lifecycle management tool, which integrates with the MATLAB/Simulink, Embedded Coder, and LDRA Testbed.
- Tool qualification: This method ensures that the tools used in the software development process are reliable and do not introduce errors. The authors used LDRA Tool Qualification Support Packs as the tool qualification method, which provides evidence of the tool’s compliance with the ISO 26262.
4.1.2. Hardware and Device
4.1.3. Technology
4.1.4. ISO Standard and Protocol
4.1.5. Application
5. Result
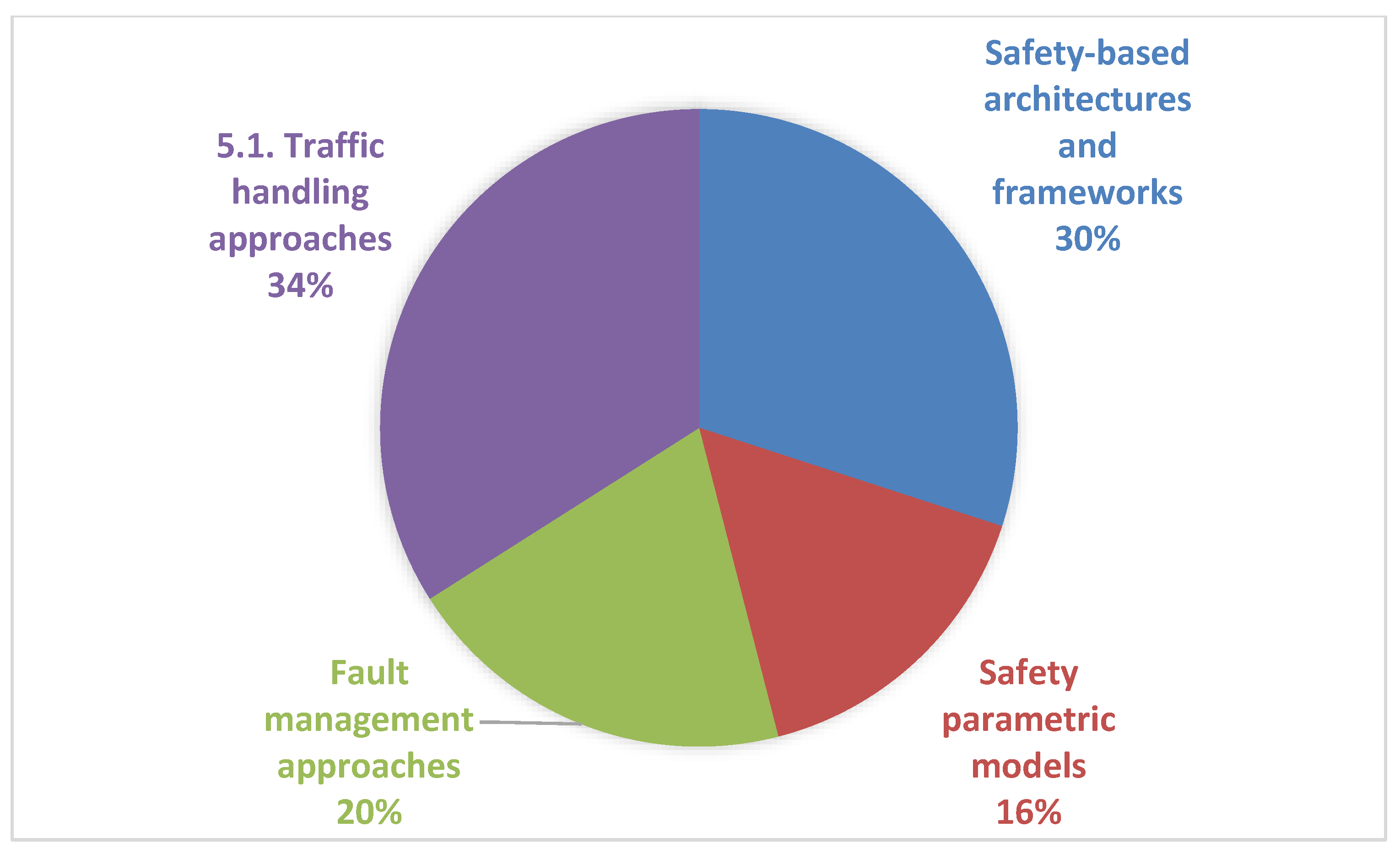
5.1. Studies Characteristics
5.1.1. Safety-Based Architectures and Frameworks
- Heterogeneous System Structure: The inherent heterogeneity within the system structure is a paramount consideration. Given the diversity in technologies and communication standards across vehicles, a comprehensive solution must be able to effectively manage this diversity. Clarity in addressing this issue is crucial when defining any proposed solution.
- Network-Level Data Exchange: The data exchange at the network level introduces the challenge of network standardization, communication capacity, and reliability. Effective data exchange is pivotal, as failure in this realm can exacerbate the occurrence of accidents and hinder the overarching goal of intelligent vehicle design.
- Comprehensive Component Coverage: In the architectural design of vehicles, it is essential to account for the roles played by all system components. A holistic perspective should be maintained to ensure that all facets of the system are adequately considered.
- Impact of Vehicle Movement and Routing: The movement, positioning, and routing of vehicles significantly influence the potential for accidents either involving other vehicles or mobile/static environmental obstacles. These factors must be factored into the architectural design.
- Control Solutions: Control solutions are imperative for individual and holistic system components. Effective control mechanisms ensure optimal operation and coordination within the autonomous vehicle ecosystem.
- Urgency and Reactivity: The agility of guarantees and the ability to respond swiftly to unforeseen events and accidents are paramount. The architecture of a vehicle must facilitate rapid responses to ensure safety in dynamic situations.
5.1.2. Fault-Management Approaches
5.1.3. Safety Parametric Models
5.1.4. Traffic Handling Approaches
5.2. Result Analysis
- Existence of Blind Spots for Sensors: Just as human drivers encounter blind spots in their field of view, autonomous vehicles can also experience limitations in their sensor coverage. These blind spots can lead to vehicle sensors failing to detect specific objects, obstacles, or events. This challenge becomes particularly crucial when swift reactions are required to respond to sudden environmental changes. The management of blind spots is a critical challenge in the design of autonomous vehicle software, necessitating robust solutions to handle unexpected situations effectively.
- Mixed Traffic Environment: Autonomous vehicles are designed to reduce accidents due to human error. However, real-world traffic environments are often hybrid, comprising a diverse array of vehicles, including conventional and autonomous ones and motorized and non-motorized forms of transportation. This heterogeneity challenges modeling these vehicles’ behavior, movement, speed, and acceleration, which may adhere to a different pattern. The complexity of detecting and reacting to faults within this diverse network of vehicles is heightened. Additionally, accurately predicting and making decisions regarding the movements of self-driving vehicles amidst such diversity is inherently challenging. Ensuring effective fault detection, forecasting, and decision-making mechanisms in such mixed traffic environments is an ongoing concern.
- Driver interaction: In mixed traffic conditions, safety control is difficult due to the unpredictability of drivers [11]. Therefore, it is necessary to add parameters such as the reaction time of drivers, the possibility of a delay in the drivers’ reaction, and other parameters to determine a way for their cooperation, taking into account any uncertain maneuvers of the drivers [71]. There is a difference between how people drive and how the AV drives, making people think the AV is unsafe. Even though the AV hardly ever crashes, people still often take over the driving from the AV. Also, even though the numbers show that the AV drives in risky situations, it rarely hits anything; this view means that the usual way of measuring safety, such as how much time there is before a collision, may not work well for traffic with AVs [72].
- The challenges above have been acknowledged in research, such as [60,73]. While specific parameters have been addressed in some methodologies, the domain of mixed traffic environments, blind spots, and the intricacies of real-world data integration for evaluation remain areas that require further exploration and development. As the technology and understanding of autonomous vehicles evolve, these challenges will likely persist and necessitate ongoing research and refinement. Due to the necessity of making decisions rooted in environmental circumstances and identifying diverse environmental factors, challenges may emerge in both implementation and decision-making processes. The ensuing challenges can encompass the following aspects:
- Complexity: The complexity of the necessary algorithms presents a significant challenge. As vehicle automation levels increase, the algorithms employed to detect, predict, and make rapid decisions in response to many requests to prevent accidents become more intricate. This poses a considerable obstacle within systems [74].
- Power Gap: Given the intricacy of algorithms, the demand for instantaneous responsiveness, the dynamic nature of environmental components, their various trajectories, and heterogeneous networks, achieving peak performance is imperative for implementing algorithms, methodologies, solutions, and frameworks. This requirement for high performance becomes particularly pronounced in elevated automation levels [75]. The power demand is considerable, encompassing operational, temporal, and processing power. However, given the existing hardware and software infrastructure, meeting these energy requirements poses a noteworthy challenge in this domain [73,76].
- Traffic Volume: Traffic volume constitutes a significant hurdle in managing autonomous vehicles. Given the current context, maintaining vehicle safety hinges on the speed of autonomous cars. Conversely, self-driving vehicles are constrained by lower speed limits to mitigate heightened risks, and regulate speed through various means [68,76]. When evaluating procedures, the traffic volume must be taken into account. Given the opacity of scenarios and the scarcity of environments with a substantial percentage of autonomous vehicles, effectively addressing unforeseen circumstances and enhancing safety becomes challenging [71,77].
6. Discussion and Limitation
7. Conclusions and Future Directions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, S.; Tang, J.; Zhang, Z.; Gaudiot, J.L. Caad: Computer architecture for autonomous driving. arXiv 2017, arXiv:1702.01894. [Google Scholar]
- Rosique, F.; Navarro, P.J.; Fernández, C.; Padilla, A. A Systematic Review of Perception System and Simulators for Autonomous Vehicles Research. Sensors 2019, 19, 648. [Google Scholar] [CrossRef] [PubMed]
- Rajabli, N.; Flammini, F.; Nardone, R.; Vittorini, V. Software verification and validation of safe autonomous cars: A systematic literature review. IEEE Access 2020, 9, 4797–4819. [Google Scholar] [CrossRef]
- Bila, C.; Sivrikaya, F.; Khan, M.A.; Albayrak, S. Vehicles of the future: A survey of research on safety issues. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1046–1065. [Google Scholar] [CrossRef]
- Rasouli, A.; Tsotsos, J.K. Autonomous vehicles that interact with pedestrians: A survey of theory and practice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 900–918. [Google Scholar] [CrossRef]
- Aradi, S. Survey of Deep Reinforcement Learning for Motion Planning of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 23, 740–759. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, Z.; Yang, H.; Yang, L. Artificial intelligence applications in the development of autonomous vehicles: A survey. IEEE/CAA J. Autom. Sin. 2020, 7, 315–329. [Google Scholar] [CrossRef]
- Omeiza, D.; Webb, H.; Jirotka, M.; Kunze, L. Explanations in autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10142–10162. [Google Scholar] [CrossRef]
- Kaur, P.; Taghavi, S.; Tian, Z.; Shi, W. A survey on simulators for testing self-driving cars. In Proceedings of the 2021 Fourth International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, 28–29 April 2021; pp. 62–70. [Google Scholar]
- Sharma, O.; Sahoo, N.C.; Puhan, N.B. Recent advances in motion and behavior planning techniques for software architecture of autonomous vehicles: A state-of-the-art survey. Eng. Appl. Artif. Intell. 2021, 101, 104211. [Google Scholar] [CrossRef]
- Akowuah, F.; Kong, F. Physical invariant based attack detection for autonomous vehicles: Survey, vision, and challenges. In Proceedings of the 2021 Fourth International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, 28–29 April 2021; pp. 31–40. [Google Scholar]
- Kim, K.; Kim, J.S.; Jeong, S.; Park, J.H.; Kim, H.K. Cybersecurity for autonomous vehicles: Review of attacks and defense. Comput. Secur. 2021, 103, 102150. [Google Scholar] [CrossRef]
- Qin, Y.; Hashemi, E.; Khajepour, A. Integrated crash avoidance and mitigation algorithm for autonomous vehicles. IEEE Trans. Ind. Inform. 2021, 17, 7246–7255. [Google Scholar] [CrossRef]
- Pham, M.; Xiong, K. A survey on security attacks and defense techniques for connected and autonomous vehicles. Comput. Secur. 2021, 109, 102269. [Google Scholar] [CrossRef]
- Shahrdar, S.; Menezes, L.; Nojoumian, M. A survey on trust in autonomous systems. In Science and Information Conference; Springer: Cham, Switzerland, 2018; pp. 368–386. [Google Scholar]
- Di Camillo, S.; Ghribi, A. Developing Safe Software for Autonomous Systems; No. 2022-01-0108, SAE Technical Paper; SAE: Warrendale, PA, USA, 2022. [Google Scholar]
- Palin, R.; Ward, D.; Habli, I.; Rivett, R. ISO 26262 Safety Cases: Compliance and Assurance. 2011. Available online: https://digital-library.theiet.org/content/conferences/10.1049/cp.2011.0251 (accessed on 1 October 2023).
- Campbell, S.; O’Mahony, N.; Krpalcova, L.; Riordan, D.; Walsh, J.; Murphy, A.; Ryan, C. Sensor technology in autonomous vehicles: A review. In Proceedings of the 2018 29th Irish Signals and Systems Conference (ISSC), Belfast, UK, 21–22 June 2018; pp. 1–4. [Google Scholar]
- Li, S.; Frey, M.; Gauterin, F. Model-Based Condition Monitoring of the Sensors and Actuators of an Electric and Automated Vehicle. Sensors 2023, 23, 887. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef] [PubMed]
- Hommes, Q.V.E. Assessment of the ISO 26262 standard, road vehicles—Functional safety. In Proceedings of the SAE 2012 Government/Industry Meeting, Washington, DC, USA, 25–27 January 2012; Volume 25. [Google Scholar]
- Adam, S.; Gerhard, G. Development of the ISO 21448. In Systems, Software and Services Process Improvement: 26th European Conference, EuroSPI 2019, Edinburgh, UK, September 18–20, 2019, Proceedings 26; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 585–593. [Google Scholar]
- Georg, M.; Christoph, S.; Omar, V.; Eugen, B. ISO/SAE DIS 21434 automotive cybersecurity standard-in a nutshell. In Computer Safety, Reliability, and Security. SAFECOMP 2020 Workshops: DECSoS 2020, DepDevOps 2020, USDAI 2020, and WAISE 2020, Lisbon, Portugal, September 15, 2020, Proceedings 39; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 123–135. [Google Scholar]
- Bell, R. Introduction to IEC 61508. In Acm International Conference Proceeding Series; 2006; Volume 162, pp. 3–12. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=1fa95e2147da7d27cc9a25166d43c9ad6e17ac2e (accessed on 1 October 2023).
- Teoh, E.R.; Kidd, D.G. Rage against the machine? Google’s self-driving cars versus human drivers. J. Saf. Res. 2017, 63, 57–60. [Google Scholar] [CrossRef]
- Oikonomou, M.G.; Orfanou, F.P.; Vlahogianni, E.I.; Yannis, G. Impacts of autonomous shuttle services on traffic, safety, and environment for future mobility scenarios. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Bogdoll, D.; Orf, S.; Töttel, L.; Zöllner, J.M. Taxonomy and Survey on Remote Human Input Systems for Driving Automation Systems. In Future of Information and Communication Conference; Springer: Cham, Switzerland, 2022; pp. 94–108. [Google Scholar]
- Acharya, S.; Mekker, M. Importance of the reputation of data manager in the acceptance of connected vehicles. Commun. Transp. Res. 2022, 2, 100053. [Google Scholar] [CrossRef]
- Sini, J.; Violante, M. A simulation-based methodology for aiding advanced driver assistance systems hazard analysis and risk assessment. Microelectron. Reliab. 2020, 109, 113661. [Google Scholar] [CrossRef]
- Yang, Z.; Bao, Y.; Yang, Y.; Huang, Z.; Bodeveix, J.P.; Filali, M.; Gu, Z. Exploiting augmented intelligence in the modeling of safety-critical autonomous systems. Form. Asp. Comput. 2021, 33, 343–384. [Google Scholar] [CrossRef]
- Li, G.; Yang, Y.; Li, S.; Qu, X.; Lyu, N.; Li, S.E. Decision making of autonomous vehicles in lane change scenarios: Deep reinforcement learning approaches with risk awareness. Transp. Res. Part C Emerg. Technol. 2022, 134, 103452. [Google Scholar] [CrossRef]
- Khan, S.K.; Shiwakoti, N.; Stasinopoulos, P. A conceptual system dynamics model for cybersecurity assessment of connected and autonomous vehicles. Accid. Anal. Prev. 2021, 165, 106515. [Google Scholar] [CrossRef]
- Dimitrakopoulos, G.; Kavakli, E.; Loucopoulos, P.; Anagnostopoulos, D.; Zographos, T. A capability-oriented modelling and simulation approach for autonomous vehicle management. Simul. Model. Pract. Theory 2019, 91, 28–47. [Google Scholar] [CrossRef]
- Ansari, S.; Ahmad, J.; Aziz Shah, S.; Kashif Bashir, A.; Boutaleb, T.; Sinanovic, S. Chaos-based privacy preserving vehicle safety protocol for 5G Connected Autonomous Vehicle networks. Trans. Emerg. Telecommun. Technol. 2020, 31, e3966. [Google Scholar] [CrossRef]
- Yu, K.; Lin, L.; Alazab, M.; Tan, L.; Gu, B. Deep learning-based traffic safety solution for a mixture of autonomous and manual vehicles in a 5G-enabled intelligent transportation system. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4337–4347. [Google Scholar] [CrossRef]
- Passerone, R.; Cancila, D.; Albano, M.; Mouelhi, S.; Plosz, S.; Jantunen, E.; Ryabokon, A.; Laarouchi, E.; Hegedus, C.; Varga, P. A methodology for the design of safety-compliant and secure communication of autonomous vehicles. IEEE Access 2019, 7, 125022–125037. [Google Scholar] [CrossRef]
- Wan, L.; Sun, Y.; Sun, L.; Ning, Z.; Rodrigues, J.J. Deep learning based autonomous vehicle super resolution DOA estimation for safety driving. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4301–4315. [Google Scholar] [CrossRef]
- Boddupalli, S.; Rao, A.S.; Ray, S. Resilient Cooperative Adaptive Cruise Control for Autonomous Vehicles Using Machine Learning. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15655–15672. [Google Scholar] [CrossRef]
- Wang, Y.; Zong, C.; Guo, H.; Chen, H. Fault-tolerant path-following control for in-wheel-motor-driven autonomous ground vehicles with differential steering. Asian J. Control 2020, 22, 1230–1240. [Google Scholar] [CrossRef]
- Biddle, L.; Fallah, S. A Novel Fault Detection, Identification and Prediction Approach for Autonomous Vehicle Controllers Using SVM. Automot. Innov. 2021, 4, 301–314. [Google Scholar] [CrossRef]
- Brinkschulte, U.; Pacher, M.; Brinkschulte, M. Improving the fail-operational behavior of automotive applications by artificial DNA. Concurr. Comput. Pract. Exp. 2021, 33, e5608. [Google Scholar] [CrossRef]
- Pan, H.; Sun, W.; Sun, Q.; Gao, H. Deep learning based data fusion for sensor fault diagnosis and tolerance in autonomous vehicles. Chin. J. Mech. Eng. 2021, 34, 72. [Google Scholar] [CrossRef]
- Parseh, M.; Asplund, F. New needs to consider during accident analysis: Implications of autonomous vehicles with collision reconfiguration systems. Accid. Anal. Prev. 2022, 173, 106704. [Google Scholar] [CrossRef] [PubMed]
- Oh, K.; Park, S.; Lee, J.; Yi, K. Functional perspective-based probabilistic fault detection and diagnostic algorithm for autonomous vehicle using longitudinal kinematic model. Microsyst. Technol. 2018, 24, 4527–4537. [Google Scholar] [CrossRef]
- Zhu, J.; Ma, Y.; Lou, Y. Multi-vehicle interaction safety of connected automated vehicles in merging area: A real-time risk assessment approach. Accid. Anal. Prev. 2022, 166, 106546. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Oh, K.; Jeong, Y.; Yi, K. Model predictive control-based fault detection and reconstruction algorithm for longitudinal control of autonomous driving vehicle using multi-sliding mode observer. Microsyst. Technol. 2020, 26, 239–264. [Google Scholar] [CrossRef]
- Pek, C.; Althoff, M. Fail-safe motion planning for online verification of autonomous vehicles using convex optimization. IEEE Trans. Robot. 2020, 37, 798–814. [Google Scholar] [CrossRef]
- Cui, J.; Sabaliauskaite, G.; Liew, L.S.; Zhou, F.; Zhang, B. Collaborative analysis framework of safety and security for autonomous vehicles. IEEE Access 2019, 7, 148672–148683. [Google Scholar] [CrossRef]
- Zhu, J.; Easa, S.; Gao, K. Merging control strategies of connected and autonomous vehicles at freeway on-ramps: A comprehensive review. J. Intell. Connect. Veh. 2022, 5, 99–111. [Google Scholar] [CrossRef]
- Jiang, R.; Liu, Z.; Li, H. Evolution towards optimal driving strategies for large-scale autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 1018–1027. [Google Scholar] [CrossRef]
- Evans, K.; de Moura, N.; Chauvier, S.; Chatila, R.; Dogan, E. Ethical decision making in autonomous vehicles: The AV ethics project. Sci. Eng. Ethics 2020, 26, 3285–3312. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef]
- Jo, Y.; Jang, J.; Ko, J.; Oh, C. An In-Vehicle Warning Information Provision Strategy for V2V-Based Proactive Traffic Safety Management. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19387–19398. [Google Scholar] [CrossRef]
- He, Y.; Feng, J.; Wei, K.; Cao, J.; Chen, S.; Wan, Y. Modeling and simulation of lane-changing and collision avoiding autonomous vehicles on superhighways. Phys. A Stat. Mech. its Appl. 2023, 609, 128328. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Pu, Z.; Hu, J.; Wang, X.; Ke, R. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving. Transp. Res. Part C Emerg. Technol. 2020, 117, 102662. [Google Scholar] [CrossRef]
- Zhu, Z.; Hu, Z.; Dai, W.; Chen, H.; Lv, Z. Deep learning for autonomous vehicle and pedestrian interaction safety. Saf. Sci. 2022, 145, 105479. [Google Scholar] [CrossRef]
- Kosari, A.; Popov, P.; Roy, R. Modelling Safety of Connected and Autonomous Vehicles (CAVs) under Cyber-Attacks on Perception and Safety Monitors. In Proceedings of the 2022 12th International Conference on Dependable Systems, Services and Technologies (DESSERT), Athens, Greece, 9–11 December 2022; pp. 1–7. [Google Scholar]
- Xu, S.; Peng, H.; Lu, P.; Zhu, M.; Tang, Y. Design and experiments of safeguard protected preview lane keeping control for autonomous vehicles. IEEE Access 2020, 8, 29944–29953. [Google Scholar] [CrossRef]
- Malawade, A.V.; Yu, S.Y.; Hsu, B.; Muthirayan, D.; Khargonekar, P.P.; Al Faruque, M.A. Spatiotemporal Scene-Graph Embedding for Autonomous Vehicle Collision Prediction. IEEE Internet Things J. 2022, 9, 9379–9388. [Google Scholar] [CrossRef]
- Sun, C.; Zheng, S.; Ma, Y.; Chu, D.; Yang, J.; Zhou, Y.; Li, Y.; Xu, T. An active safety control method of collision avoidance for intelligent connected vehicle based on driving risk perception. J. Intell. Manuf. 2021, 32, 1249–1269. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, X.; Xu, Z.; Li, X.; Qu, X. Modeling and field experiments on autonomous vehicle lane changing with surrounding human-driven vehicles. Comput.-Aided Civ. Infrastruct. Eng. 2021, 36, 877–889. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, J.; Liu, Y.; Guo, K.; Ding, H. Planning flexible and smooth paths for lane-changing maneuvers of autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 200–212. [Google Scholar] [CrossRef]
- Xiao, W.; Cassandras, C.G.; Belta, C.A. Bridging the gap between optimal trajectory planning and safety-critical control with applications to autonomous vehicles. Automatica 2021, 129, 109592. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Li, Y.; Zeng, P.; Liang, Y. Structured road-oriented motion planning and tracking framework for active collision avoidance of autonomous vehicles. Sci. China Technol. Sci. 2021, 64, 2427–2440. [Google Scholar] [CrossRef]
- Wang, J.; Huang, Z.; Huang, X.; Wang, T.; Shen, G.; Xie, J. An accident prediction architecture based on spatio-clock stochastic and hybrid model for autonomous driving safety. Concurr. Comput. Pract. Exp. 2021, 35, e6550. [Google Scholar] [CrossRef]
- Jiang, J.; Seaid, M.; Mohamed, M.S.; Li, H. Inverse algorithm for real-time road roughness estimation for autonomous vehicles. Arch. Appl. Mech. 2020, 90, 1333–1348. [Google Scholar] [CrossRef]
- Kummetha, V.C.; Kondyli, A.; Devos, H. Evaluating driver comprehension of the roadway environment to retain accountability of safety during driving automation. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 457–471. [Google Scholar] [CrossRef]
- Zhang, Y.; You, T.; Chen, J.; Du, C.; Ai, Z.; Qu, X. Safe and Energy-Saving Vehicle-Following Driving Decision-Making Framework of Autonomous Vehicles. IEEE Trans. Ind. Electron. 2021, 69, 13859–13871. [Google Scholar] [CrossRef]
- Wu, H.; Lv, D.; Cui, T.; Hou, G.; Watanabe, M.; Kong, W. SDLV: Verification of steering angle safety for self-driving cars. Form. Asp. Comput. 2021, 33, 325–341. [Google Scholar] [CrossRef]
- Fernandez-Llorca, D.; Gomez, E. Trustworthy Artificial Intelligence Requirements in the Autonomous Driving Domain. Computer 2023, 56, 29–39. [Google Scholar] [CrossRef]
- Jung, S.; Seyedi, M.; Rashid, M.M. Safety Assessment of the Interaction Between the Autonomous Shuttle Bus and Vulnerable Road Users; No. Transit IDEA Project 98; Transportation Research Board: Washington, DC, USA, 2022. [Google Scholar]
- Xu, Z.; Fang, Y.; Zheng, N.; Vu, H.L. Analyzing the inconsistency in driving patterns between manual and autonomous modes under complex driving scenarios with a VR-enabled simulation platform. J. Intell. Connect. Veh. 2022, 5, 215–234. [Google Scholar] [CrossRef]
- Khattak, Z.H.; Fontaine, M.D.; Smith, B.L. Exploratory investigation of disengagements and crashes in autonomous vehicles under mixed traffic: An endogenous switching regime framework. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7485–7495. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Low-Speed Automated Vehicles (LSAVs) in Public Transportation; National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2021. [Google Scholar]
- National Academies of Sciences, Engineering, and Medicine. Business Models to Facilitate Deployment of Connected Vehicle Infrastructure to Support Automated Vehicle Operations; National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2020. [Google Scholar]
- Mattas, K.; Makridis, M.; Hallac, P.; Raposo, M.A.; Thiel, C.; Toledo, T.; Ciuffo, B. Simulating deployment of connectivity and automation on the Antwerp ring road. IET Intell. Transp. Syst. 2018, 12, 1036–1044. [Google Scholar] [CrossRef]
- Biswal, A.K.; Singh, D.; Tripathy, A.K.; Pattanayak, B.K. Smart Autonomous Collision Avoidance and Obstacle Detection Using Internet of Things (IoT) and Controller Area Network (CAN) Protocol. In Advances in Distributed Computing and Machine Learning; Springer: Singapore, 2022; pp. 54–65. [Google Scholar]
- Bathla, G.; Bhadane, K.; Singh, R.K.; Kumar, R.; Aluvalu, R.; Krishnamurthi, R.; Kumar, A.; Thakur, R.N.; Basheer, S. Autonomous vehicles and intelligent automation: Applications, challenges, and opportunities. Mob. Inf. Syst. 2022, 2022, 7632892. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Category | Main Topic | Publication Year | Limitation | Our Contribution |
|---|---|---|---|---|---|
| Rosique et al. [2] | Autonomous vehicles’ sensors | A comprehensive survey of the sensors and software used for the perception and simulation of AV | 2019 | Limited to sensors, perception phase and simulators | We have considered more questions for the paper and, in addition to simulation, other issues such as algorithms, design methods, and model and architecture parameters have also been considered. |
| Rajabli et al. [3] | Autonomous vehicle software design | A systematic literature review of recent research on software verification and validation (V&V) of self-driving cars | 2021 | A specific view in a part of software design includes the V&V of autonomous vehicles. | We try to examine the design of self-driving vehicle systems in the broader scope, and categorize and examine general plans for improving safety. |
| Ma et al. [7] | Autonomous vehicle development approaches | This paper discussed artificial intelligence methods and approaches for autonomous vehicle applications and development. | 2020 | They focused on a specific domain of applications. | We are not limited to a group of methods. A taxonomy of the reviewed solutions is provided. |
| Rasouli et al. [5] | Autonomous vehicles’ accident avoidance | This paper worked on pedestrians’ communication with autonomous vehicles and methods and approaches for predicting and managing behavior. | 2019 | It only deals with accidents in which pedestrians play a role, and other influencing factors are not investigated. | We have considered the factors as part of the method and have reviewed the methods based on software and hardware requirements and different levels of automation. |
| Omeiza et al. [8] | Autonomous vehicle design and standards | Researchers have examined the existing standards and methods for designing autonomous vehicles and an overview of high-end design. | 2021 | The authors focused on standards and protocols. | We have considered standards and protocols as a branch of taxonomy, which we have mentioned in different approaches to the protocol used. |
| Kaur et al. [9] | Autonomous vehicles’ testing | The authors focused on testing methods, requirements, and simulators. | 2021 | Simulation requirements have been addressed in this article, but evaluation criteria have yet to be considered. | We have raised two questions regarding simulation as research questions in our article, which categorize the evaluation tools and criteria and determine the percentage of their use in the investigated methods. |
| Aradi et al. [6] | Autonomous vehicles’ motion management | Researchers examined motion management methods and approaches based on deep reinforcement learning | 2020 | It is both limited to a specific domain and restricted to particular approaches. | This article discusses various tools and algorithms that are used to ensure safety in automatic vehicles. |
| Akowuah et al. [11] | Autonomous vehicles’ security | Authors focused on security and attack management approaches in different components of autonomous vehicles | 2021 | It deals with security, which is an aspect of safety. | We are not limited to one requirement, and we have categorized the selected articles based on the design method from the point of view of the software. |
| Kim et al. [12] | Autonomous vehicles’ security | This paper categorized attacks and defense | 2021 | This paper focused on attacks on AV | Attacks carried out at the system level are considered a category of threats in the review of the methods, and we have also addressed other security threats. |
| Qin et al. [13] | Autonomous vehicle accident avoidance | The authors reviewed crash control algorithms and crash situation control based on the internal implementation of vehicles | 2021 | This article only targets security and privacy issues. | In addition to trust management solutions at the system level, examining other matters related to vehicle safety and failure solutions is necessary. |
| Pham et al. [14] | Connected autonomous vehicle attacks and security management | This paper focused on attack-handling on connected autonomous vehicles, and the authors analyzed open issues and challenges | 2021 | This paper focused on attacks on AV | Security and attack issues are considered one of the sub-branches in the classifying methods to provide a more general view of the existing methods. The primary category is based on the design method. |
| Shahrdar et al. [15] | Autonomous vehicles’ trust management | The paper reviewed the methods for trust management on the vehicles, components, and sensor level | 2021 | This paper works on trust management issues and challenges. | The software and hardware view are created to some extent in this article, but it is only limited to trust, and we have removed this limitation. |
| Sharma et al. [10] | Autonomous vehicle’s motions and behavior prediction | The authors focused on behavior prediction methods and solutions based on the software’s implementation | 2021 | This article also has a software perspective, but it is limited to the mobility of vehicles and their role in accidents. | We have addressed all the aspects related to the occurrence of an accident in the design of software systems. |
| Index | Research Question | Reason |
|---|---|---|
| 1 | What are the standard features, applications, and requirements for safety management in autonomous vehicles? | We design a taxonomy of components, requirements, applications, and standards for safety management intended for architectural design management from a software point of view. |
| 2 | Which methods and approaches are used to characterize safety in autonomous vehicles from a software point of view? | Existing architectural and system solutions and methods are categorized according to which simulation tools, strategies, and evaluation parameters can be examined. Finally, they can be improved to cover the existing challenges and open issues with less complexity. |
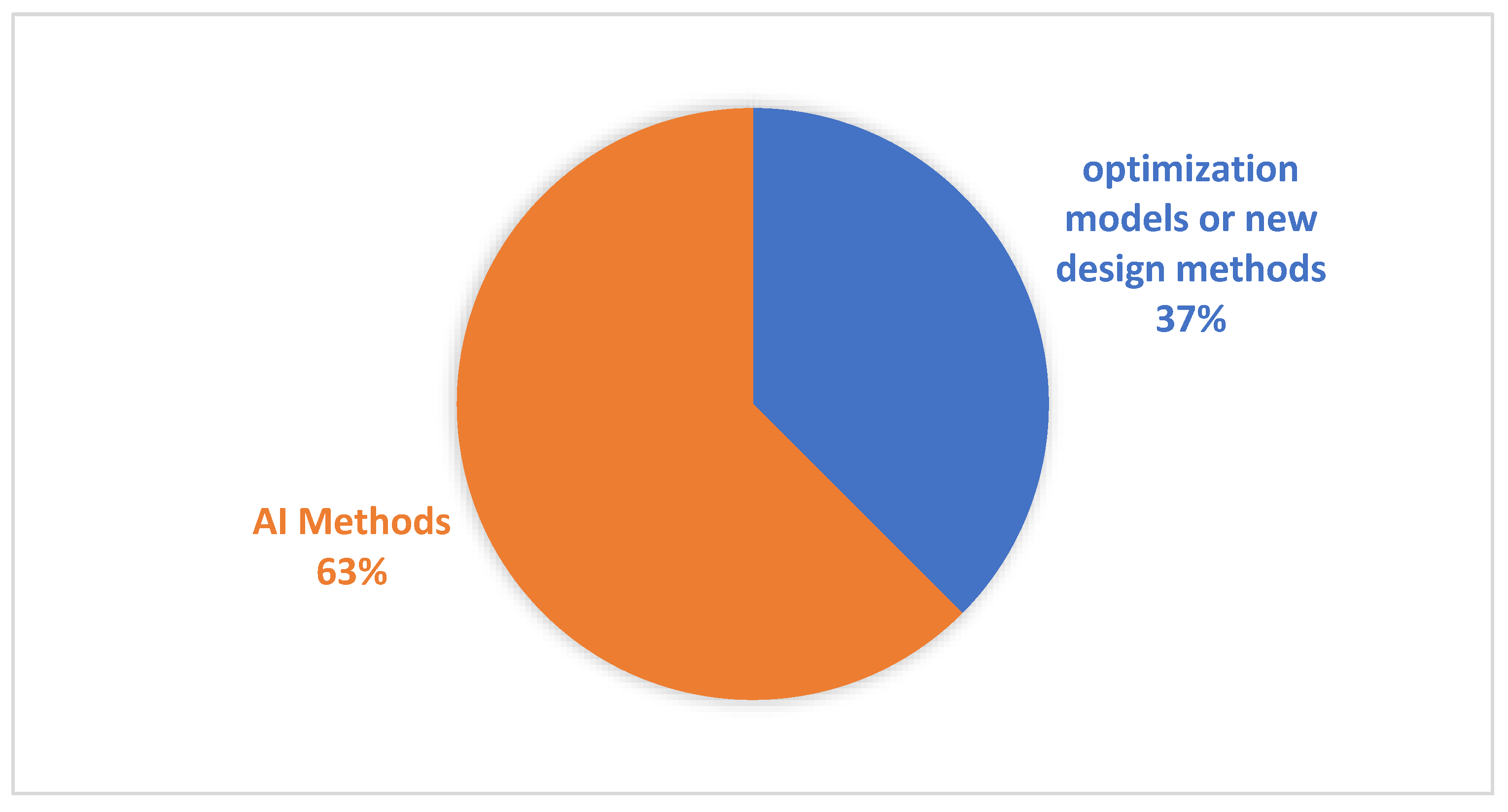
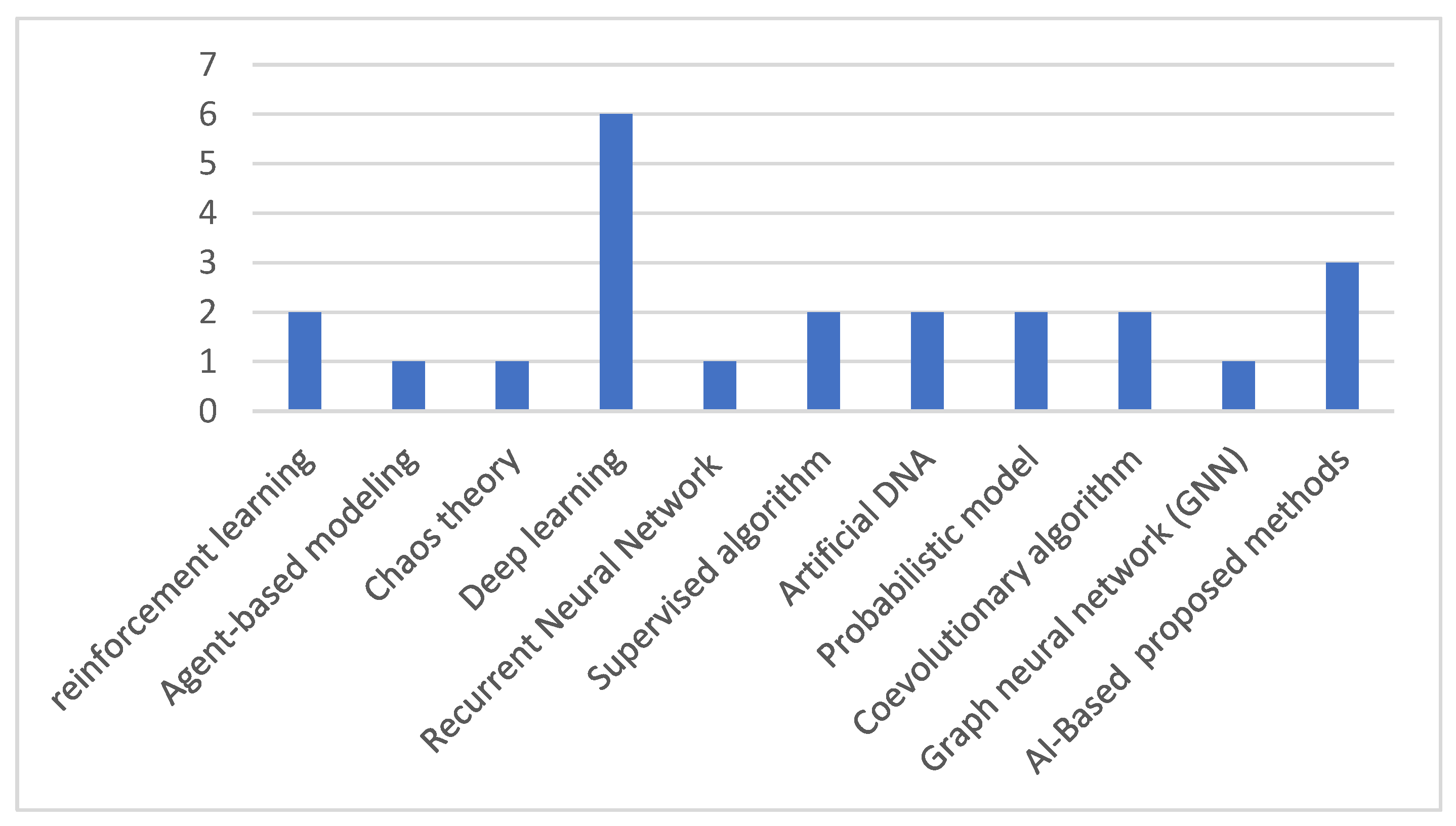
| 3 | What is the impact of AI methods on the safety management in autonomous vehicles? | A classification is provided based on AI techniques that can be used for future work. There is no classification in related works for the safety management and AI integration in autonomous vehicles. |
| 4 | Which metrics are used to evaluate design approaches in autonomous vehicles? | Evaluation parameters are specified so that existing methods can be reviewed and compared. |
| 5 | What are the most common tools and simulators in autonomous vehicles from a software point of view? | Simulation tools are categorized and analyzed in order to select the appropriate tools for evaluation in future work. |
| 6 | What are the open issues, challenges, and opportunities in the design of autonomous vehicle’s safety? | Challenges and open issues that need to be addressed in future work are extracted to accelerate improvements in existing methods. |
| Search Terms |
|---|
| “autonomous cars” AND “safety” |
| “autonomous vehicles” AND “safety” |
| “self-driving cars” AND “safety” |
| # | Criteria |
|---|---|
| 1 | Papers must have software and sensor perspectives. |
| 2 | ISI journal papers will be selected. |
| 3 | Papers were published between 2018 and February 2023. |
| # | Criteria |
|---|---|
| 1 | Evaluation and simulation methods are ambiguous. |
| 2 | Papers that do not cover cars and only raise other types of vehicles. |
| 3 | Papers that cover safety issues only with security issues and do not address environmental challenges such as roads |
| 4 | Papers are not about software and sensor requirements and perspectives. |
| URL | Access Date | Database |
|---|---|---|
| http://ieeexplore.ieee.org | 30 February 2023 | IEEE |
| http://www.sciencedirect.com | 30 February 2023 | ScienceDirect.com |
| http://dl.acm.org | 30 February 2023 | ACM |
| http://www.springer.com | 30 February 2023 | Springer |
| http://onlinelibrary.wiley.com | 30 February 2023 | Wiley Online Library |
| https://www.mdpi.com/ | 30 February 2023 | MDPI |
| # | Subject | Paper |
|---|---|---|
| 1 | Safety and autonomous vehicles surveys | 13 |
| 2 | Safety management components in autonomous vehicles | 7 |
| 3 | Fault management in autonomous vehicles | 10 |
| 4 | Architectures and frameworks based on safety | 15 |
| 5 | Safety model in autonomous vehicles | 8 |
| 6 | Traffic handling and control for safety | 17 |
| Research | Method | Advantage | Disadvantage | Simulation Tools | Evaluation Parameters | Techniques or Approaches |
|---|---|---|---|---|---|---|
| [31] | Using reinforcement learning method in risk management and evaluation | Static and dynamic barriers are considered in the evaluation scenarios | Environmental, network, and communication risks are not considered | CARLA | Performance | Reinforcement learning |
| [33] | Controlled all processes and environmental system | Pedestrians, traffic density, and all environmental parameters are considered. | Different layers like communication, network, and resource management are not considered. | C#.net | Accident detection | Agent-based modeling |
| [34] | Designed a method based on the 5G standard | Cover communication and network parameter | Different standards are used in real data and must be added for future work. | LTE EPC Network simulator | Delay and performance | Chaos theory |
| [35] | It is designed based on data collection and transmission handling | Covers mixed traffic and network parameters | Based on the 5G standard, using real data and different standards is difficult. | TensorFlow | Accident detection, performance | Deep learning |
| [36] | Designed based on signal and noise data management | Cover network environmental components | Computing complexity | ADA | Performance | Contract-based approach |
| [37] | Location-based architecture | Cover mobility of vehicles and different traffic density | Some resource management and computing constraints must be added for continuous localization | Not considered | Performance | Deep learning |
| [38] | A system for attacks’ and communication anomalies’ detection | Historical feedback is captured for detection improvement in the future | More machines and scalability must be considered. | Physical research simulator RDS1000 | Performance and accuracy | Recurrent Neural Network (RNN) |
| [32] | A conceptual model for cyber-security attacks and risk handling | Some factors are shared in security and safety, and it can improve these parameters | This method has some limitations, such as the lack of data sources, the uncertainty of future scenarios, and its complexity | Not considered | Not considered | System dynamics approach |
| Research | Method | Advantage | Disadvantage | Simulation Tools | Evaluation Parameters | Techniques or Approaches |
|---|---|---|---|---|---|---|
| [29] | Risk classification and fault handling based on the risks | It used real data for evaluation | There is no priority for risks, and it has complexity. | IPG CarMaker | Performance, time parameters | Simulation-based methodology |
| [39] | Designed based on path and lane controlling | Different scenarios are designed based on real data | Time parameters have not been measured. Resource constraints and computing complexity are not considered. And, it does not take into account all environmental factors. | Simulink | Performance | Sliding-mode controller |
| [40] | Fault prediction with environmental monitoring | Very accurate in fault detection | Higher complexity and real-time response are not considered | MATLAB/IPG CarMaker | The success rate for fault management | Supervised algorithm |
| [41] | Designed for hardware and sensor fault detection | Main operation parameters are considered | Focus on sensor failure and electronic control unit for hardware fault detection, but the other parameters are not considered. | Automotive simulator | Performance | Artificial DNA |
| [42] | This paper used camera data collection for environmental parameters handling in fault management. | Environmental parameters are covered and decrease accidents | The other data and scenarios are not considered. | Not considered | Performance, reliability | Deep learning |
| [44] | In addition to static environmental barriers, the possibility of collisions between vehicles is considered. | Main operation parameters are considered | Weather and environmental parameters are not considered. | MATLAB/Simulink | Performance | Probabilistic model |
| [45] | Focused on the communication layer and parameters | Risk handling regarding network and communication | The real-time reaction is not considered; complexity of real data | Prescan | Performance, the success rate for fault management | Supervised algorithm |
| [46] | Optimization methods for speed and acceleration control | Fault detection improvement | Time parameters Evaluation is not provided, and system performance may be more complex with real data. | MATLAB/Simulink | Performance, reliability | Model predictive control (MPC) |
| [47] | Event monitoring for fault detection | Vehicles’ mobility is covered | The real-time response must be considered. It is used only for static obstacles. | Python/C++ | Time parameters, performance, the success rate for fault management | Convex optimization |
| [48] | Security handling for attack management | Success rate improvement for different attack types | Real-time and mobility must be evaluated. | Not considered | The success rate for fault management | Functional perspective-based approach |
| Research | Method | Advantage | Disadvantage | Simulation Tools | Evaluation Parameters | Techniques or Approaches |
|---|---|---|---|---|---|---|
| [50] | A multi-objective function is provided for time and accident avoidance | Real data and scenarios are considered | Evaluation with related work must be considered | SUMO | Performance, the success rate for accident management | Coevolutionary algorithm |
| [51] | Parameters are added based on different risks | Environmental parameters are used for modeling. | Risk priority must be considered | Not considered | Performance | Artificial DNA |
| [52] | Work on system parameters | Parameters related to road rules and parameters related to traffic control and vehicle speed are considered, and real data and real roads are controlled | Complexity for scalability | VISSIM | Performance, the success rate for accident detection | Control algorithm |
| [55] | Multi-objective model based on pattern extraction using the reinforcement learning method | The real-time response must be considered | MPC5675K | Performance, the success rate for accident detection | Reinforcement learning | |
| [53] | A probabilistic modeling approach for cyber-attack problems | The model can capture the uncertainty and variability of cyber-attacks | Real and more scalable data must be considered | Eclipse MOSAIC | Hazard and accident detection and delay time | Probabilistic model |
| [54] | A model for lane-changing and collision -avoiding autonomous vehicles | Efficiency in delay reduction and fuel consumption | Complexity and different uncertain parameters in modeling | MATLAB and SUMO | Vehicle collision avoidance | Simulation-based approach |
| Research | Method | Advantage | Disadvantage | Simulation Tools | Evaluation Parameters | Techniques or Approaches |
|---|---|---|---|---|---|---|
| [56] | Deep learning for resource management | Real data evaluation | Complexity | MATLAB | Performance, time parameters, the success rate for accident handling | Deep learning |
| [58] | Control algorithm for path monitoring | Mobility and traffic density handling | Real-time response is not considered | Not considered | Performance, accuracy | Control algorithm |
| [59] | Use of camera data for mixed obstacles handling | Different scenarios on real data | Complexity, and it does not support scalability | CARLA | Time parameters, performance | Graph neural network (GNN) |
| [60] | Design intelligent autonomous vehicles | Real-time responses are considered | Complexity for more scalable scenarios | MATLAB, CarSIM | Performance and time parameters | Dynamics-based state–space equations |
| [61] | Traffic handling based on environmental parameters | Mixed traffic is evaluated | Different parameters must be added | C++ | Performance, the success rate for accident management | Dynamics-based state–space equations |
| [62] | Scheduling based on traffic density | Real-time response and better configuration | More scenarios and more parameters must be added | MPC5675K | Performance, time parameters | Simulation-based approach |
| [63] | Pedestrian management for traffic handling | Works on priority with high-risk accidents covering | Complexity and higher cost for computation | MATLAB | The success rate for accident management | Control barrier function (CBF) |
| [64] | Traffic management based on traffic density and data collection | Use environmental parameters | Obstacles must be considered | CarSIM, Simulink | Performance, the success rate for accident management | Improved artificial potential fields (APFs) |
| [65] | Traffic management based on localization | Mobility handling | Complexity and it is not scalable | CCSL | Performance, the success rate for accident management | The spatial-clock stochastic and hybrid model |
| [66] | Traffic management with accident detection | More accurate | Real-time and resource management must be added | Not considered | Efficiency, accuracy | A novel inverse algorithm |
| [67] | Driver action handling | Accuracy improvement | Complexity and cost | Not considered | Performance, the success rate for accident management | A new system design |
| [68] | Framework for traffic with constraint management | Resource and cost management | The real-time response must be evaluated | Not considered | Performance, the success rate for accident management | Deep learning |
| [69] | Deep learning and neural network for traffic management | More flexible for different scenarios | Complexity and cost | Not considered | Performance, the success rate for accident management | |
| [57] | Machine learning techniques and convolutional neural networks for pedestrian detection | Performance improvement covers different data types. | Scalability and real data must be considered | Sumo and MATLAB | Performance | Convolutional neural networks |
| [54] | A model for changing lanes in autonomous vehicles | Different environmental situations are covered | Driver parameters must be added to the model | MATLAB/Simulink | Success rate | System modeling |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbasi, S.; Rahmani, A.M. Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review. Information 2023, 14, 555. https://doi.org/10.3390/info14100555
Abbasi S, Rahmani AM. Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review. Information. 2023; 14(10):555. https://doi.org/10.3390/info14100555
Chicago/Turabian StyleAbbasi, Shirin, and Amir Masoud Rahmani. 2023. "Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review" Information 14, no. 10: 555. https://doi.org/10.3390/info14100555
APA StyleAbbasi, S., & Rahmani, A. M. (2023). Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review. Information, 14(10), 555. https://doi.org/10.3390/info14100555