
Algorithm for Determining Three Components of the Velocity Vector of Highly Maneuverable Aircraft

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Geometry of the Problem. The Equation of the Distance to the Underlying Surface for a Maneuvering Aircraft
2.2. Models of Transmitted and Received Signals. Observation Equation
3. Results
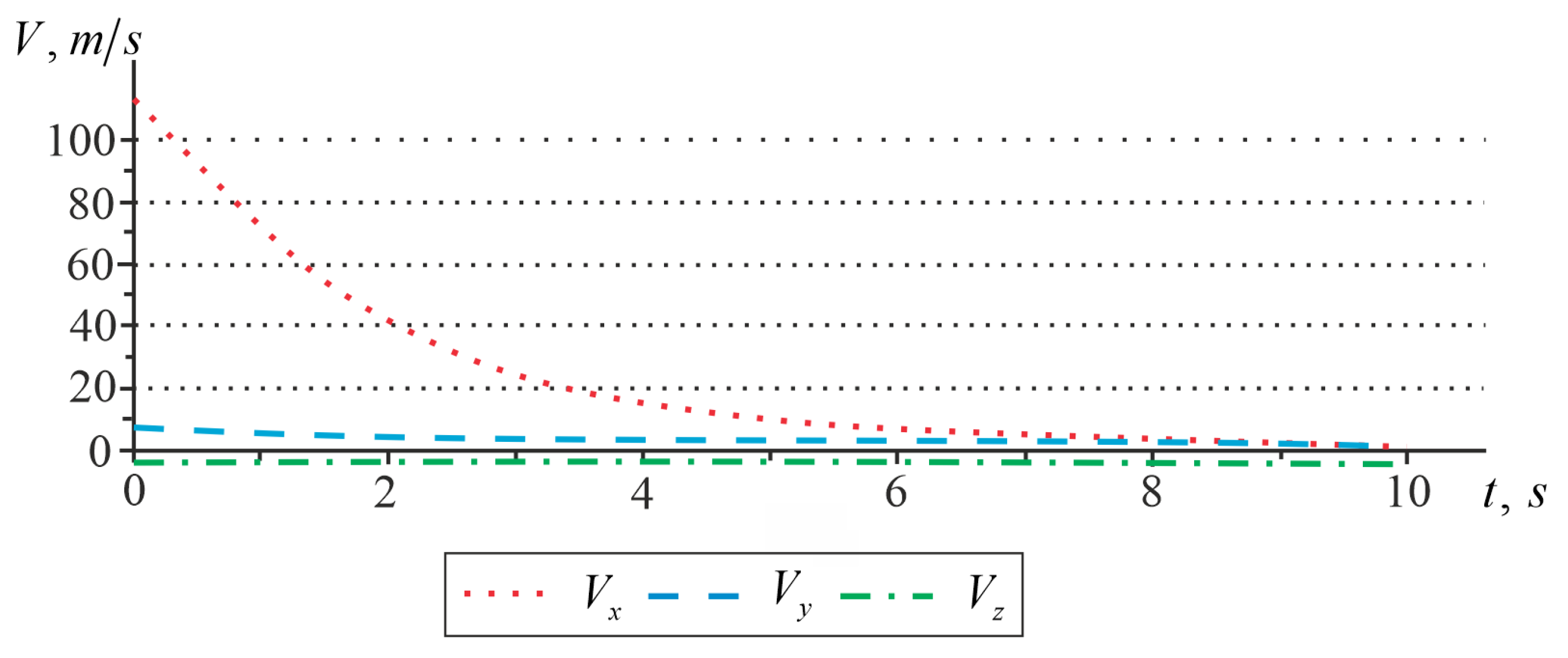
3.1. Signal Processing Algorithm Synthesis. Simulation Results
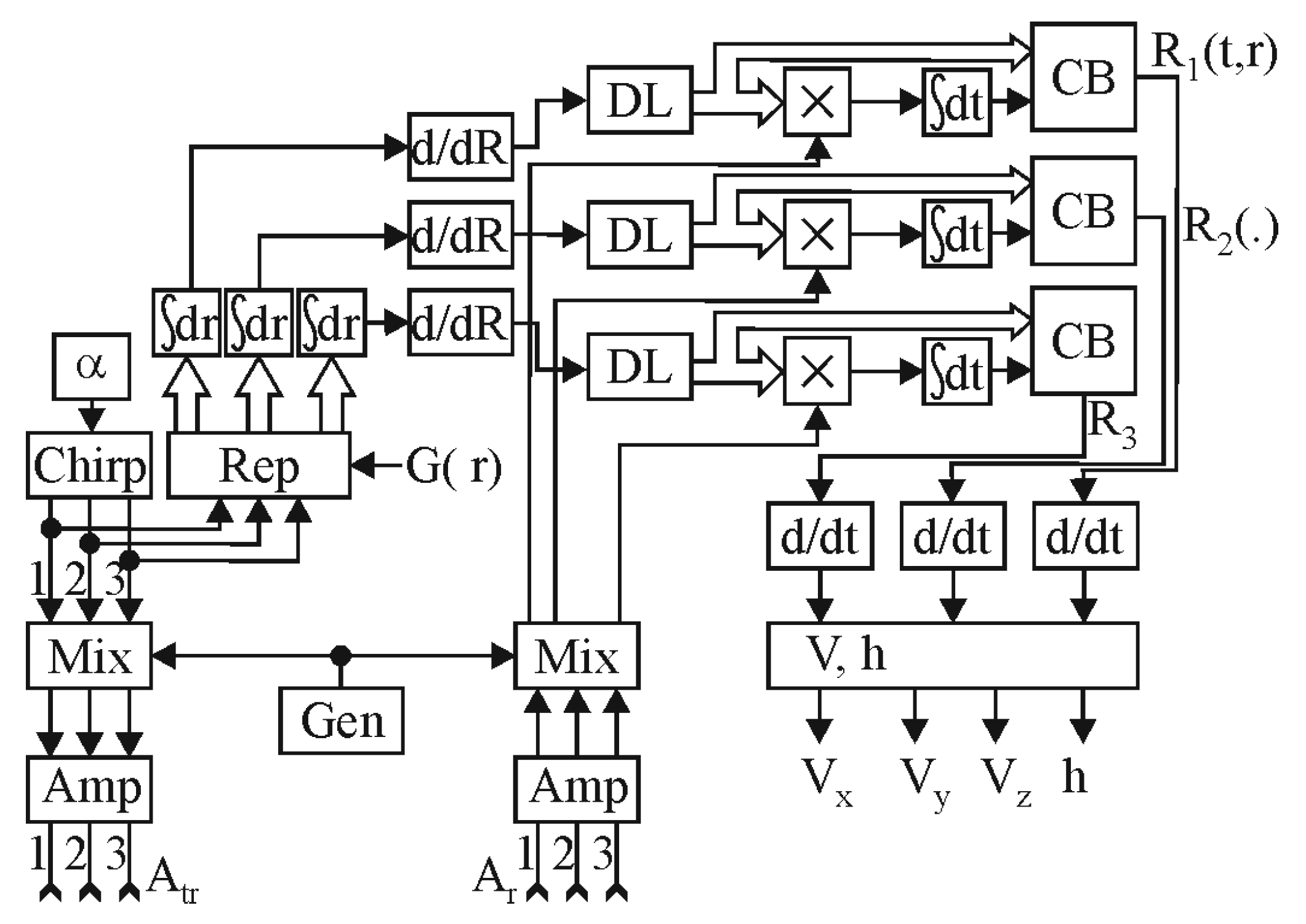
3.2. Structural Diagram of the Radar
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nikolić, D.; Drajić, D.; Čiča, Z. Multifunctional Radars as Primary Sensors in IoT Based Safe City Solutions. In Proceedings of the 2021 15th International Conference on Advanced Technologies, Systems and Services in Telecommunications (TELSIKS), Nis, Serbia, 20–22 October 2021; pp. 273–278. [Google Scholar] [CrossRef]
- Gurbuz, A.C.; Mdrafi, R.; Cetiner, B.A. Cognitive Radar Target Detection and Tracking With Multifunctional Reconfigurable Antennas. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 64–76. [Google Scholar] [CrossRef]
- Fan, Z.; Shi, H.; Dong, S.; Zhang, L.; Wang, C.; Wu, Y. Design of a Space-borne Multifunctional Reconfigurable Terminal. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 960–964. [Google Scholar]
- Müller, T.; Marquardt, P.; Brüggenwirth, S. A Load Balancing Surveillance Algorithm For Multifunctional Radar Resource Management. In Proceedings of the 2019 20th International Radar Symposium (IRS), Ulm, Germany, 26–28 June 2019; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Fränken, D.; Liegl, A. Integration of Multi-Band Passive and Multi-Functional Active Radar Data. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Kiat, W.P.; Mok, K.M.; Lee, W.K.; Goh, H.G.; Achar, R. An energy efficient FPGA partial reconfiguration based micro-architectural technique for IoT applications. Microproc. Microsys. 2020, 73, 102966. [Google Scholar] [CrossRef]
- Rohr, D.; Studiger, M.; Stastny, T.; Lawrance, N.R.J.; Siegwart, R. Nonlinear Model Predictive Velocity Control of a VTOL Tiltwing UAV. IEEE Robot. Autom. Lett. 2021, 6, 5776–5783. [Google Scholar] [CrossRef]
- Lins, R.G.; Givigi, S.N.; Kurka, P.R.G. Velocity Estimation for Autonomous Vehicles Based on Image Analysis. IEEE Trans. Instrum. Meas. 2016, 65, 96–103. [Google Scholar] [CrossRef]
- Mohamed, S.A.S.; Haghbayan, M.-H.; Westerlund, T.; Heikkonen, J.; Tenhunen, H.; Plosila, J. A Survey on Odometry for Autonomous Navigation Systems. IEEE Acc. 2019, 7, 97466–97486. [Google Scholar] [CrossRef]
- Pavlikov, V.; Volosyuk, V.; Tserne, E.; Sydorenko, N.; Prokofiev, I.; Peretiatko, M. Radar for Aircraft Motion Vector Components Measurement. In Proceedings of the 2022 IEEE 2nd Ukrainian Microwave Week, Kharkiv, Ukraine, 14–18 November 2022. [Google Scholar]
- Volosyuk, V.; Pavlikov, V.; Zhyla, S.; Tserne, E.; Odokiienko, O.; Humennyi, A.; Popov, A.; Uruskiy, O. Signal Processing Algorithm for Monopulse Noise Noncoherent Wideband Helicopter Altitude Radar. Computation 2022, 10, 150. [Google Scholar] [CrossRef]
- Zhyla, S.; Volosyuk, V.; Pavlikov, V.; Ruzhentsev, N.; Tserne, E.; Popov, A.; Shmatko, O.; Havrylenko, O.; Kuzmenko, N.; Dergachov, N.; et al. Statistical synthesis of aerospace radars structure with optimal spatio-temporal signal processing, extended observation area and high spatial resolution. Radioel. Comp. Syst. 2022, 1, 178–194. [Google Scholar] [CrossRef]
- Volosyuk, V.; Pavlikov, V.; Nechyporuk, M.; Zhyla, S.; Kosharskyi, V.; Tserne, E. Structure Optimization of the Multi-Channel On-Board Radar with Antenna Aperture Synthesis and Algorithm for Power Line Selection on the Background of the Earth Surface. In Proceedings of the 2020 IEEE International Conference on Problems of Infocommunications, Science and Technology (PIC S&T), Kyiv, Ukraine, 6–9 October 2020; pp. 775–778. [Google Scholar] [CrossRef]
- Volosyuk, V.; Zhyla, S.; Pavlikov, V.; Tserne, E.; Sobkolov, A.; Shmatko, O.; Belousov, K. Mathematical description of imaging processes in ultra-wideband active aperture synthesis systems using stochastic sounding signals. Radioel. Comp. Syst. 2021, 4, 166–182. [Google Scholar] [CrossRef]
- Fiedler, H.; Boerner, E.; Mittermayer, J.; Krieger, G. Total Zero Doppler Steering—A New Method for Minimizing the Doppler Centroid. IEEE Geosc. Rem. Sens. Lett. 2005, 2, 141–145. [Google Scholar] [CrossRef]
- Helicopter Flying Handbook (FAA-H-8083-21B); United States Department of Transportation, Federal Aviation Administration: Oklahoma City, OK, USA, 2019.
- Chang, C.-J.; Bell, M.R. Hybrid Filters for Delay-Doppler Resolution Enhancement in Chirp Radar Systems. In Proceedings of the 2021 55th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 31 October–3 November 2021; pp. 1053–1060. [Google Scholar] [CrossRef]
- Vannicola, V.C.; Hale, T.B.; Wicks, M.C.; Antonik, P. Ambiguity function analysis for the chirp diverse waveform (CDW). In Proceedings of the IEEE 2000 International Radar Conference [Cat. No. 00CH37037], Alexandria, VA, USA, 12 May 2000; pp. 666–671. [Google Scholar] [CrossRef]
- Rossi, R.J. Mathematical Statistics: An Introduction to Likelihood Based Inference; John Wiley & Sons: New York, NY, USA, 2018. [Google Scholar]
- Volosyuk, V.; Kravchenko, V. Theory of Radio-Engineering Systems of Remote Sensing and Radar; Fizmatlit: Moscow, Russia, 2008. [Google Scholar]
- Zhang, G.; Bian, D.; Zhang, W.; Wu, X.; Zhang, Z.; Yu, H. The research and independent on autonomous safe landing for unmanned helicopter. In Proceedings of the 2017 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 7–29 October 2017; pp. 434–437. [Google Scholar] [CrossRef]
- Ikram, M.Z.; Ahmad, A.; Wang, D. High-accuracy distance measurement using millimeter-wave radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1296–1300. [Google Scholar] [CrossRef]
- Futatsumori, S.; Amielh, C.; Miyazaki, N.; Kobayashi, K.; Katsura, N. Helicopter Flight Evaluations of High-Voltage Power Lines Detection Based on 76 GHz Circular Polarized Millimeter-Wave Radar System. In Proceedings of the 2018 15th European Radar Conference (EuRAD), Madrid, Spain, 26–28 September 2018; pp. 218–221. [Google Scholar] [CrossRef]


















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pavlikov, V.; Tserne, E.; Odokiienko, O.; Sydorenko, N.; Peretiatko, M.; Kosolapova, O.; Prokofiiev, I.; Humennyi, A.; Belousov, K. Algorithm for Determining Three Components of the Velocity Vector of Highly Maneuverable Aircraft. Computation 2023, 11, 35. https://doi.org/10.3390/computation11020035
Pavlikov V, Tserne E, Odokiienko O, Sydorenko N, Peretiatko M, Kosolapova O, Prokofiiev I, Humennyi A, Belousov K. Algorithm for Determining Three Components of the Velocity Vector of Highly Maneuverable Aircraft. Computation. 2023; 11(2):35. https://doi.org/10.3390/computation11020035
Chicago/Turabian StylePavlikov, Volodymyr, Eduard Tserne, Oleksii Odokiienko, Nataliia Sydorenko, Maksym Peretiatko, Olha Kosolapova, Ihor Prokofiiev, Andrii Humennyi, and Konstantin Belousov. 2023. "Algorithm for Determining Three Components of the Velocity Vector of Highly Maneuverable Aircraft" Computation 11, no. 2: 35. https://doi.org/10.3390/computation11020035
APA StylePavlikov, V., Tserne, E., Odokiienko, O., Sydorenko, N., Peretiatko, M., Kosolapova, O., Prokofiiev, I., Humennyi, A., & Belousov, K. (2023). Algorithm for Determining Three Components of the Velocity Vector of Highly Maneuverable Aircraft. Computation, 11(2), 35. https://doi.org/10.3390/computation11020035