
Addressing the Folding of Intermolecular Springs in Particle Simulations: Fixed Image Convention

Abstract
:1. Introduction
2. Methods
2.1. Coordinate System and Constraints
2.2. Conventions of Separation Vectors
2.2.1. Absolute Distance (AD)
2.2.2. Minimum Image Convention (MIC)
2.2.3. Fixed Image Convention (FIC)
- Affine deformation: the transformation is applied to both the box and the constituent particles. In this case, the shift vectors are transformed accordingly:
- Nonaffine deformation: the transformation is applied only to the box, and the shift vectors remain unaffected:
3. Results
3.1. Comparisons between MIC and FIC
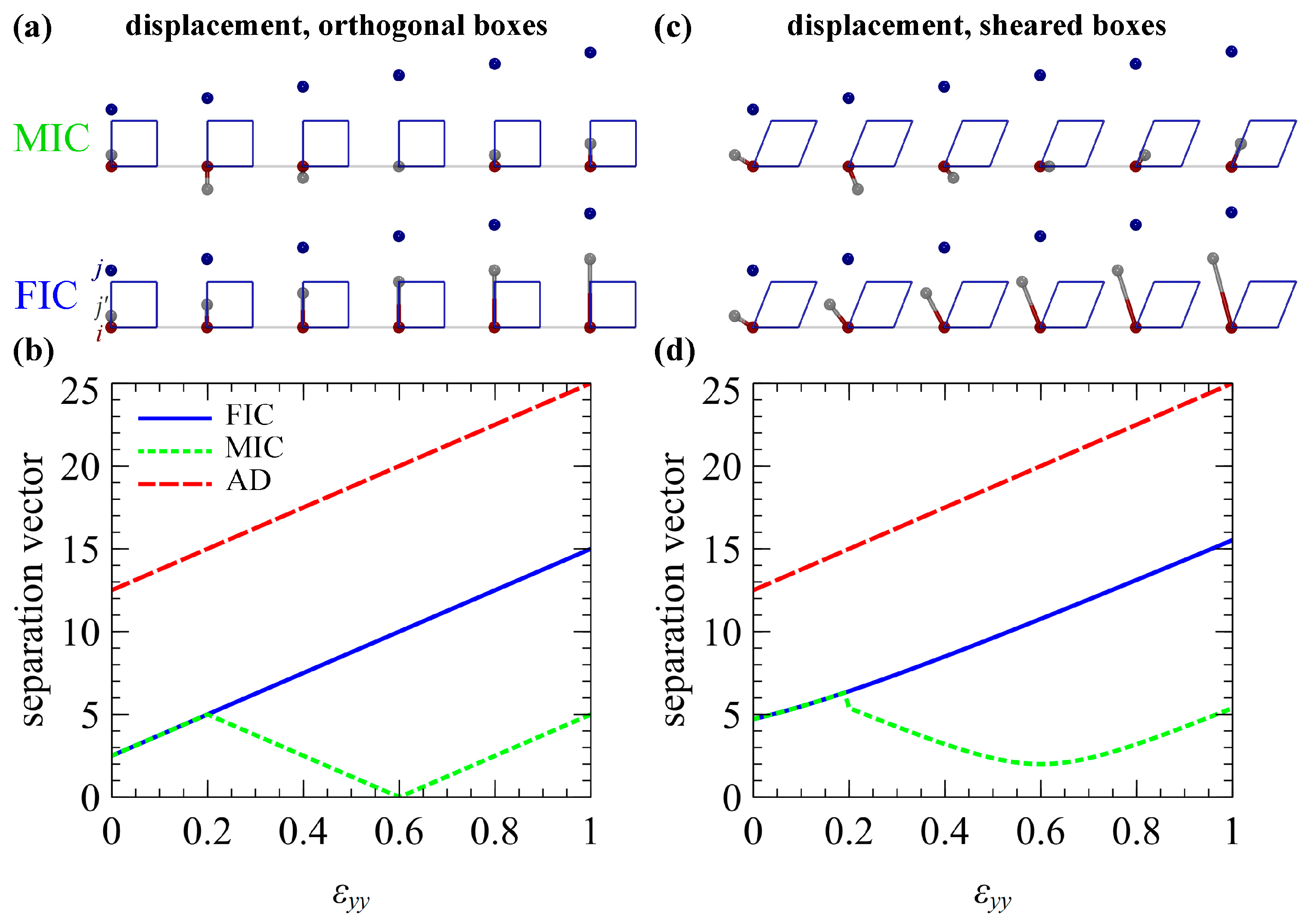
3.1.1. Particle Displacement in Rigid Boxes
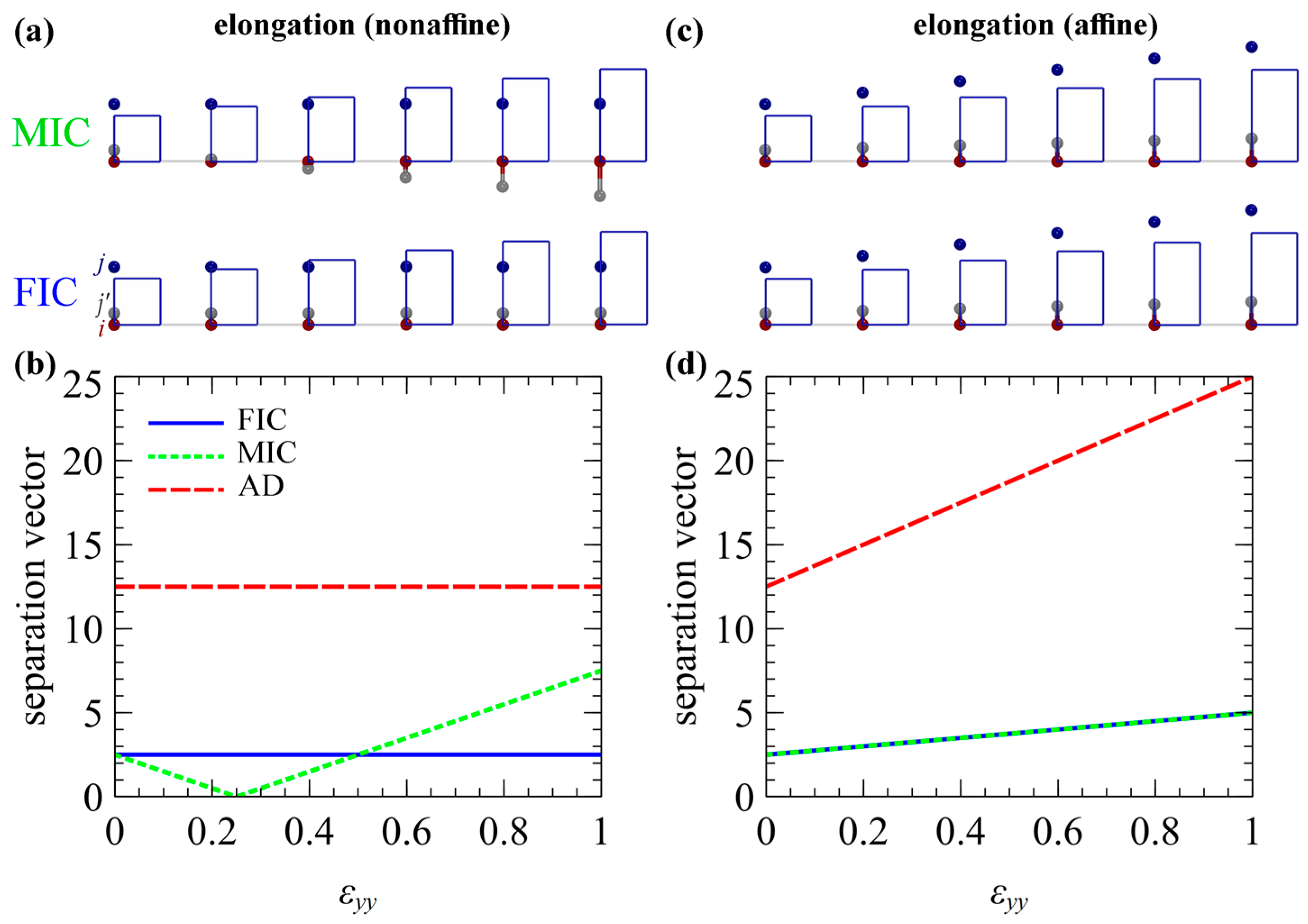
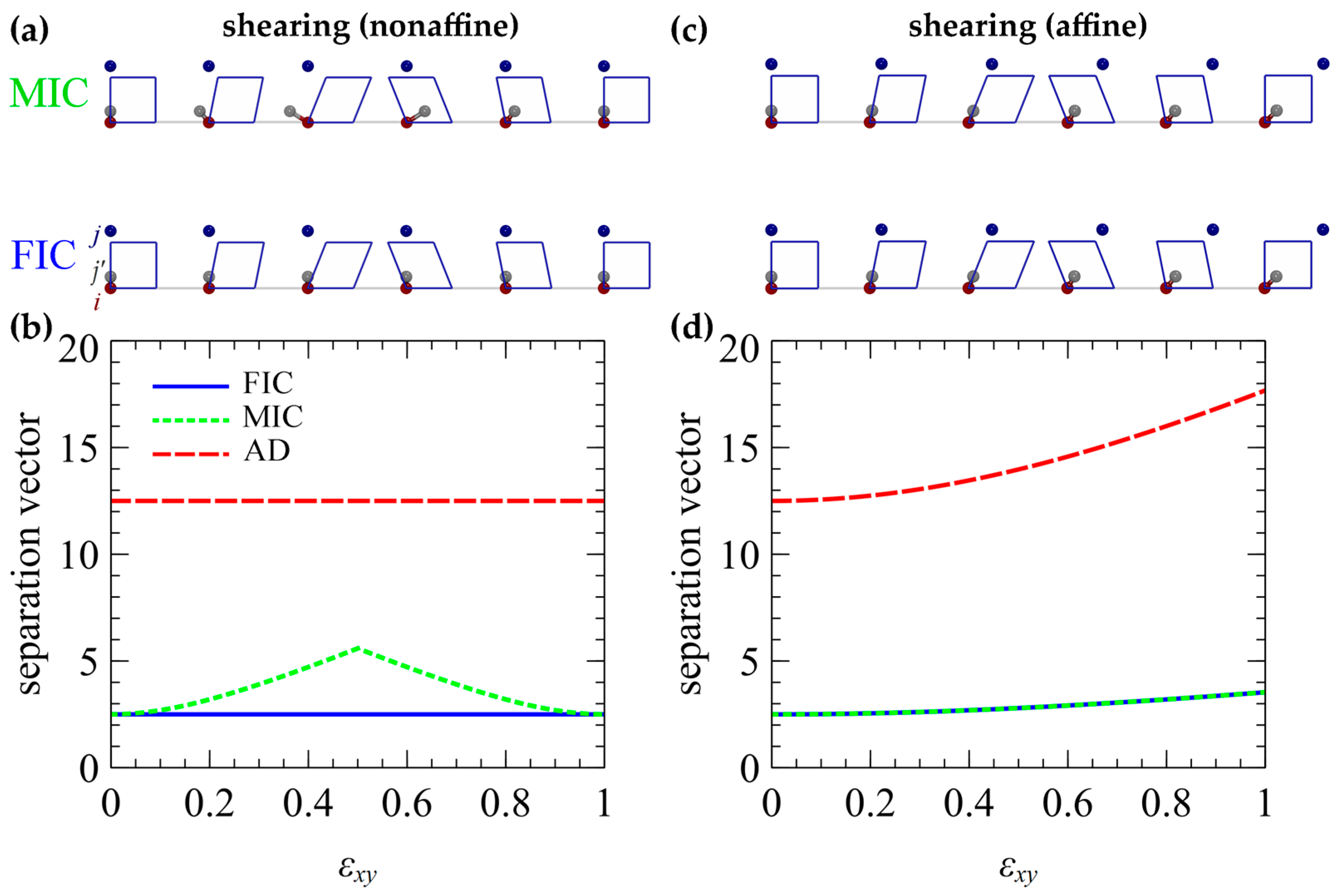
3.1.2. Affine and Nonaffine Deformation (Varying Box Size)
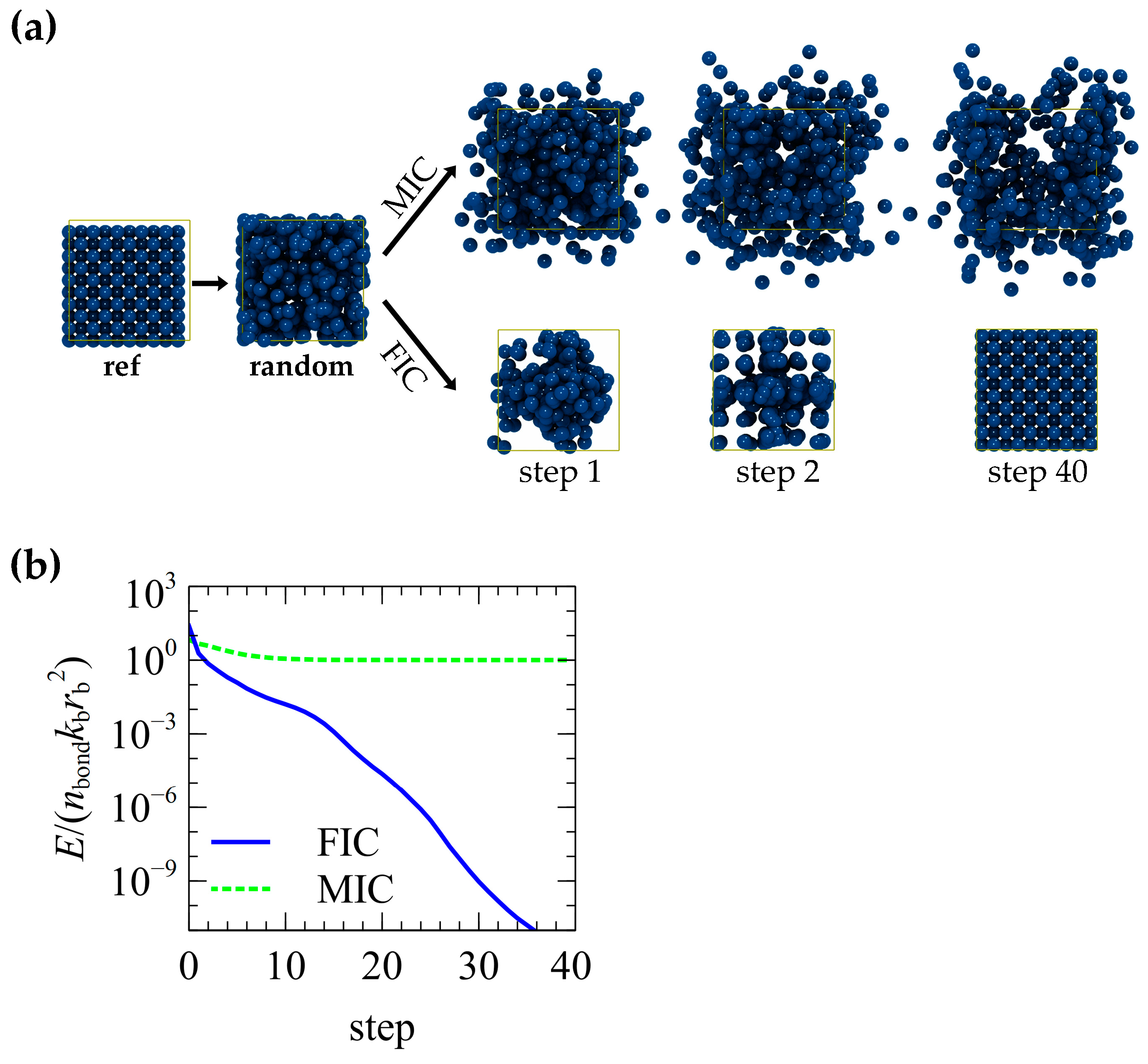
3.2. Stability
3.3. Efficiency
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Analytic Expression of the Deformation Gradient
Appendix B. Implementation of a Conjugate Gradient Algorithm
- Bracket minimum between two larger values;
- Optimize ak via inverse parabolic interpolation;
- In case (ii) fails, switch to the golden-section optimization.
- The absolute difference between the current (Enext) and previous (Eprev) energy is below a tolerance value:
- A maximum minimization step (kmax) has been exceeded.
References
- Bernaschi, M.; Melchionna, S.; Succi, S. Mesoscopic Simulations at the Physics-Chemistry-Biology Interface. Rev. Mod. Phys. 2019, 91, 25004. [Google Scholar] [CrossRef]
- Zeng, Q.H.; Yu, A.B.; Lu, G.Q. Multiscale Modeling and Simulation of Polymer Nanocomposites. Prog. Polym. Sci. 2008, 33, 191–269. [Google Scholar] [CrossRef]
- Langner, K.M.; Sevink, G.J.A. Mesoscale Modeling of Block Copolymer Nanocomposites. Soft Matter 2012, 8, 5102–5118. [Google Scholar] [CrossRef]
- Lyulin, S.V.; Larin, S.V.; Nazarychev, V.M.; Fal’kovich, S.G.; Kenny, J.M. Multiscale Computer Simulation of Polymer Nanocomposites Based on Thermoplastics. Polym. Sci. Ser. C 2016, 58, 2–15. [Google Scholar] [CrossRef]
- Sgouros, A.P.; Vogiatzis, G.G.; Megariotis, G.; Tzoumanekas, C.; Theodorou, D.N. Multiscale Simulations of Graphite-Capped Polyethylene Melts: Brownian Dynamics/Kinetic Monte Carlo Compared to Atomistic Calculations and Experiment. Macromolecules 2019, 52, 7503–7523. [Google Scholar] [CrossRef]
- Padding, J.T.; Briels, W.J.; Stukan, M.R.; Boek, E.S. Review of Multi-Scale Particulate Simulation of the Rheology of Wormlike Micellar Fluids. Soft Matter 2009, 5, 4367–4375. [Google Scholar] [CrossRef]
- Nafar Sefiddashti, M.H.; Edwards, B.J.; Khomami, B. Individual Chain Dynamics of a Polyethylene Melt Undergoing Steady Shear Flow. J. Rheol. 2015, 59, 119–153. [Google Scholar] [CrossRef]
- Sgouros, A.P.; Megariotis, G.; Theodorou, D.N. Slip-Spring Model for the Linear and Nonlinear Viscoelastic Properties of Molten Polyethylene Derived from Atomistic Simulations. Macromolecules 2017, 50, 4524–4541. [Google Scholar] [CrossRef]
- Allen, M.P.; Tildeslay, D.J. Computer Simulation of Liquids; Clarendon Press: New York, NY, USA, 1989; ISBN 0198556454. [Google Scholar]
- Groot, R.D.; Warren, P.B. Dissipative Particle Dynamics: Bridging the Gap between Atomistic and Mesoscopic Simulation. J. Chem. Phys. 1997, 107, 4423–4435. [Google Scholar] [CrossRef]
- Español, P.; Warren, P.B. Perspective: Dissipative Particle Dynamics. J. Chem. Phys. 2017, 146, 150901. [Google Scholar] [CrossRef]
- Padding, J.T.; Briels, W.J. Time and Length Scales of Polymer Melts Studied by Coarse-Grained Molecular Dynamics Simulations. J. Chem. Phys. 2002, 117, 925–943. [Google Scholar] [CrossRef]
- Schieber, J.D.; Neergaard, J.; Gupta, S. A Full-Chain, Temporary Network Model with Sliplinks, Chain-Length Fluctuations, Chain Connectivity and Chain Stretching. J. Rheol. 2003, 47, 213. [Google Scholar] [CrossRef]
- Nair, D.M.; Schieber, J.D. Linear Viscoelastic Predictions of a Consistently Unconstrained Brownian Slip-Link Model. Macromolecules 2006, 39, 3386–3397. [Google Scholar] [CrossRef]
- Likhtman, A.E. Single-Chain Slip-Link Model of Entangled Polymers: Simultaneous Description of Neutron Spin-Echo, Rheology, and Diffusion. Macromolecules 2005, 38, 6128–6139. [Google Scholar] [CrossRef]
- Masubuchi, Y. Simulating the Flow of Entangled Polymers. Annu. Rev. Chem. Biomol. Eng. 2014, 5, 11–33. [Google Scholar] [CrossRef]
- Vogiatzis, G.G.; Megariotis, G.; Theodorou, D.N. Equation of State-Based Slip-Spring Model for Entangled Polymer Dynamics. Macromolecules 2017, 50, 3004–3029. [Google Scholar] [CrossRef]
- Edwards, S.F. The Statistical Mechanics of Polymerized Material. Proc. Phys. Soc. 1967, 92, 9–16. [Google Scholar] [CrossRef]
- de Gennes, P.G. Reptation of a Polymer Chain in the Presence of Fixed Obstacles. J. Chem. Phys. 1971, 55, 572. [Google Scholar] [CrossRef]
- Doi, M. Explanation for the 3.4-Power Law for Viscosity of Polymeric Liquids on the Basis of the Tube Model. J. Polym. Sci. Polym. Phys. Ed. 1983, 21, 667–684. [Google Scholar] [CrossRef]
- Ramírez-Hernández, A.; Peters, B.L.; Schneider, L.; Andreev, M.; Schieber, J.D.; Müller, M.; de Pablo, J.J. A Multi-Chain Polymer Slip-Spring Model with Fluctuating Number of Entanglements: Density Fluctuations, Confinement, and Phase Separation. J. Chem. Phys. 2017, 146, 014903. [Google Scholar] [CrossRef]
- Masubuchi, Y.; Doi, Y.; Uneyama, T. Effects of Slip-Spring Parameters and Rouse Bead Density on Polymer Dynamics in Multichain Slip-Spring Simulations. J. Phys. Chem. B 2022, 126, 2930–2941. [Google Scholar] [CrossRef] [PubMed]
- Masubuchi, Y. Multi-Chain Slip-Spring Simulations for Branch Polymers. Macromolecules 2018, 51, 10184–10193. [Google Scholar] [CrossRef]
- Philippas, A.P.; Sgouros, A.P.; Megariotis, G.; Theodorou, D.N. Mesoscopic Simulations of Star Polyethylene Melts at Equilibrium and under Steady Shear Flow. In Proceedings of the International Conference of Computational Methods in Sciences and Engineering ICCMSE 2020, Crete, Greece, 29 April–3 May 2020; Volume 2343. [Google Scholar] [CrossRef]
- Megariotis, G.; Vogiatzis, G.G.; Sgouros, A.P.; Theodorou, D.N. Slip Spring-Based Mesoscopic Simulations of Polymer Networks: Methodology and the Corresponding Computational Code. Polymers 2018, 10, 1156. [Google Scholar] [CrossRef] [PubMed]
- Masubuchi, Y.; Uneyama, T. Retardation of the Reaction Kinetics of Polymers Due to Entanglement in the Post-Gel Stage in Multi-Chain Slip-Spring Simulations. Soft Matter 2019, 15, 5109–5115. [Google Scholar] [CrossRef] [PubMed]
- Schneider, J.; Fleck, F.; Karimi-Varzaneh, H.A.; Müller-Plathe, F. Simulation of Elastomers by Slip-Spring Dissipative Particle Dynamics. Macromolecules 2021, 54, 5155–5166. [Google Scholar] [CrossRef]
- Sgouros, A.P.; Lakkas, A.T.; Megariotis, G.; Theodorou, D.N. Mesoscopic Simulations of Free Surfaces of Molten Polyethylene: Brownian Dynamics/Kinetic Monte Carlo Coupled with Square Gradient Theory and Compared to Atomistic Calculations and Experiment. Macromolecules 2018, 51, 9798–9815. [Google Scholar] [CrossRef]
- Chappa, V.C.; Morse, D.C.; Zippelius, A.; Müller, M. Translationally Invariant Slip-Spring Model for Entangled Polymer Dynamics. Phys. Rev. Lett. 2012, 109, 148302. [Google Scholar] [CrossRef]
- Moghadam, S.; Saha Dalal, I.; Larson, R.G. Slip-Spring and Kink Dynamics Models for Fast Extensional Flow of Entangled Polymeric Fluids. Polymers 2019, 11, 465. [Google Scholar] [CrossRef]
- Lees, A.W.; Edwards, S.F. The Computer Study of Transport Processes under Extreme Conditions. J. Phys. C Solid State Phys. 1972, 5, 1921–1928. [Google Scholar] [CrossRef]
- Fetters, L.J.; Lohse, D.J.; Colby, R.H. CHAPTER 25 Chain Dimensions and Entanglement Spacings. In Physical Properties of Polymers Handbook; Springer: Berlin/Heidelberg, Germany, 2006; pp. 445–452. [Google Scholar] [CrossRef]
- Petrie, C.J.S. Extensional Flow—A Mathematical Perspective. Rheol. Acta 1995, 34, 12–26. [Google Scholar] [CrossRef]
- Petrie, C.J.S. One Hundred Years of Extensional Flow. J. Nonnewton. Fluid Mech. 2006, 137, 1–14. [Google Scholar] [CrossRef]
- Deiters, U.K. Efficient Coding of the Minimum Image Convention. Z. Phys. Chem. 2013, 227, 345–352. [Google Scholar] [CrossRef]
- Sgouros, P.A.; Theodorou, D.N. FixImag. Available online: https://github.com/ArisSgouros/FixImag.git (accessed on 22 May 2023).
- Thompson, A.P.; Aktulga, H.M.; Berger, R.; Bolintineanu, D.S.; Brown, W.M.; Crozier, P.S.; in ’t Veld, P.J.; Kohlmeyer, A.; Moore, S.G.; Nguyen, T.D.; et al. LAMMPS—A Flexible Simulation Tool for Particle-Based Materials Modeling at the Atomic, Meso, and Continuum Scales. Comput. Phys. Commun. 2022, 271, 108171. [Google Scholar] [CrossRef]
- Fletcher, R.; Reeves, C.M. Function Minimization by Conjugate Gradients. Comput. J. 1964, 7, 149–154. [Google Scholar] [CrossRef]
- Polak, E.; Ribière, G. Note sur la convergence de méthodes de directions conjuguées. ESAIM Math. Model. Numer. Anal. Modélisation Mathématique Anal. Numérique 1969, 3, 35–43. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| scn | Operation | Reference | Deformed | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| εyy | εxy | box | coord | |||||||||||
| A | 1 | 0 | F | T | 10 | 0 | 12.5 | 2.5 | 2.5 | 10 | 0 | 25 | 5 | 15 |
| B | 1 | 0 | F | T | 10 | 4 | 12.5 | 4.71 | 4.71 | 10 | 4 | 25 | 5.38 | 15.52 |
| C | 1 | 0 | T | F | 10 | 0 | 12.5 | 2.5 | 2.5 | 20 | 0 | 12.5 | 7.5 | 2.5 |
| D | 1 | 0 | T | T | 10 | 0 | 12.5 | 2.5 | 2.5 | 20 | 0 | 25 | 5 | 5 |
| E | 0 | 1 | T | F | 10 | 0 | 12.5 | 2.5 | 2.5 | 10 | 5 | 12.5 | 2.5 | 2.5 |
| F | 0 | 1 | T | T | 10 | 0 | 12.5 | 2.5 | 2.5 | 10 | 5 | 17.67 | 3.53 | 3.53 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sgouros, A.P.; Theodorou, D.N. Addressing the Folding of Intermolecular Springs in Particle Simulations: Fixed Image Convention. Computation 2023, 11, 106. https://doi.org/10.3390/computation11060106
Sgouros AP, Theodorou DN. Addressing the Folding of Intermolecular Springs in Particle Simulations: Fixed Image Convention. Computation. 2023; 11(6):106. https://doi.org/10.3390/computation11060106
Chicago/Turabian StyleSgouros, Aristotelis P., and Doros N. Theodorou. 2023. "Addressing the Folding of Intermolecular Springs in Particle Simulations: Fixed Image Convention" Computation 11, no. 6: 106. https://doi.org/10.3390/computation11060106
APA StyleSgouros, A. P., & Theodorou, D. N. (2023). Addressing the Folding of Intermolecular Springs in Particle Simulations: Fixed Image Convention. Computation, 11(6), 106. https://doi.org/10.3390/computation11060106