
MSVR & Operator-Based System Design of Intelligent MIMO Sensorless Control for Microreactor Devices



Abstract
:1. Introduction
2. Modeling
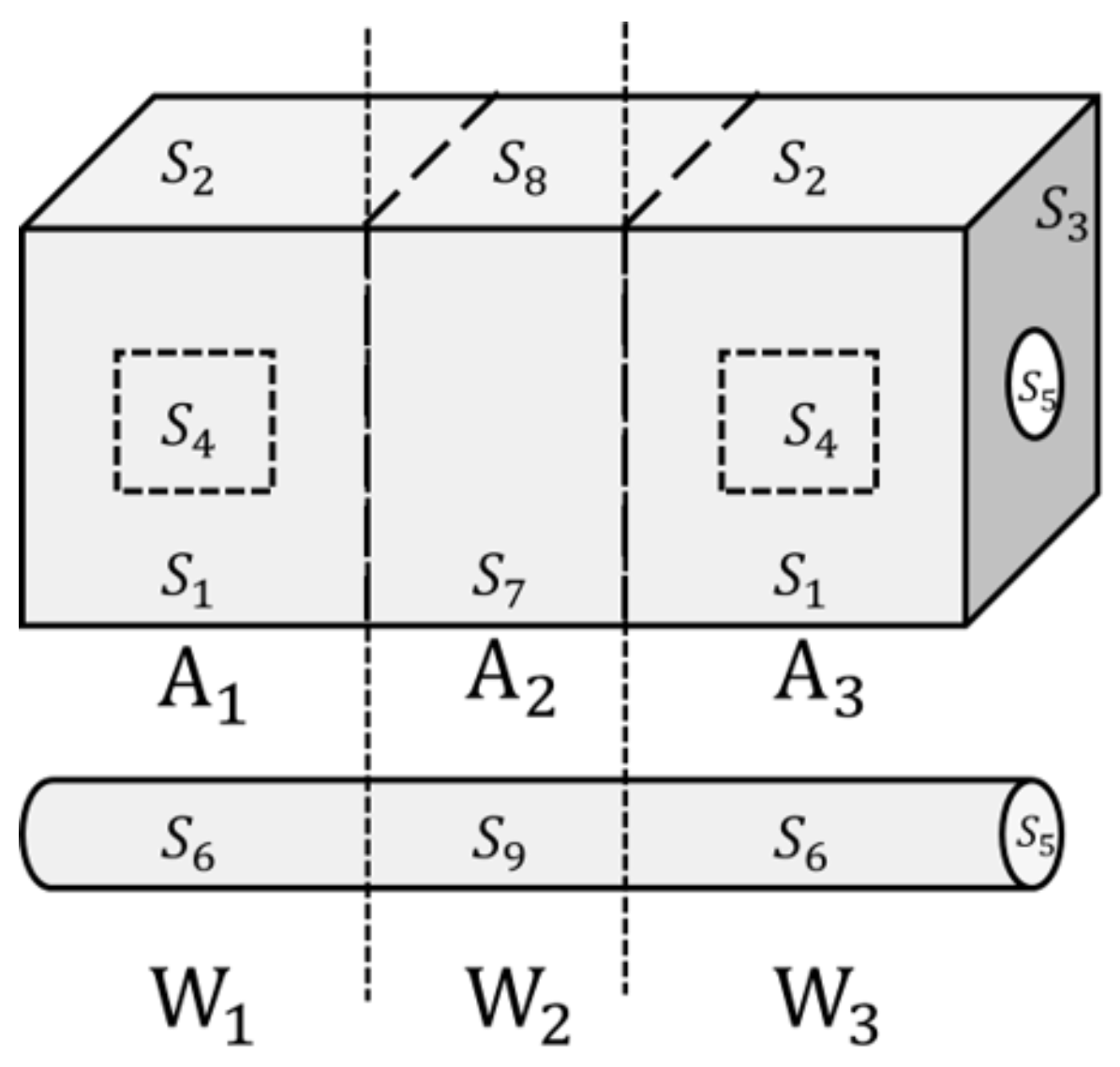
2.1. Modeling of Heat Spreader
2.2. Modeling of Microreactor
2.3. Modeling via M–SVR
3. Control Design
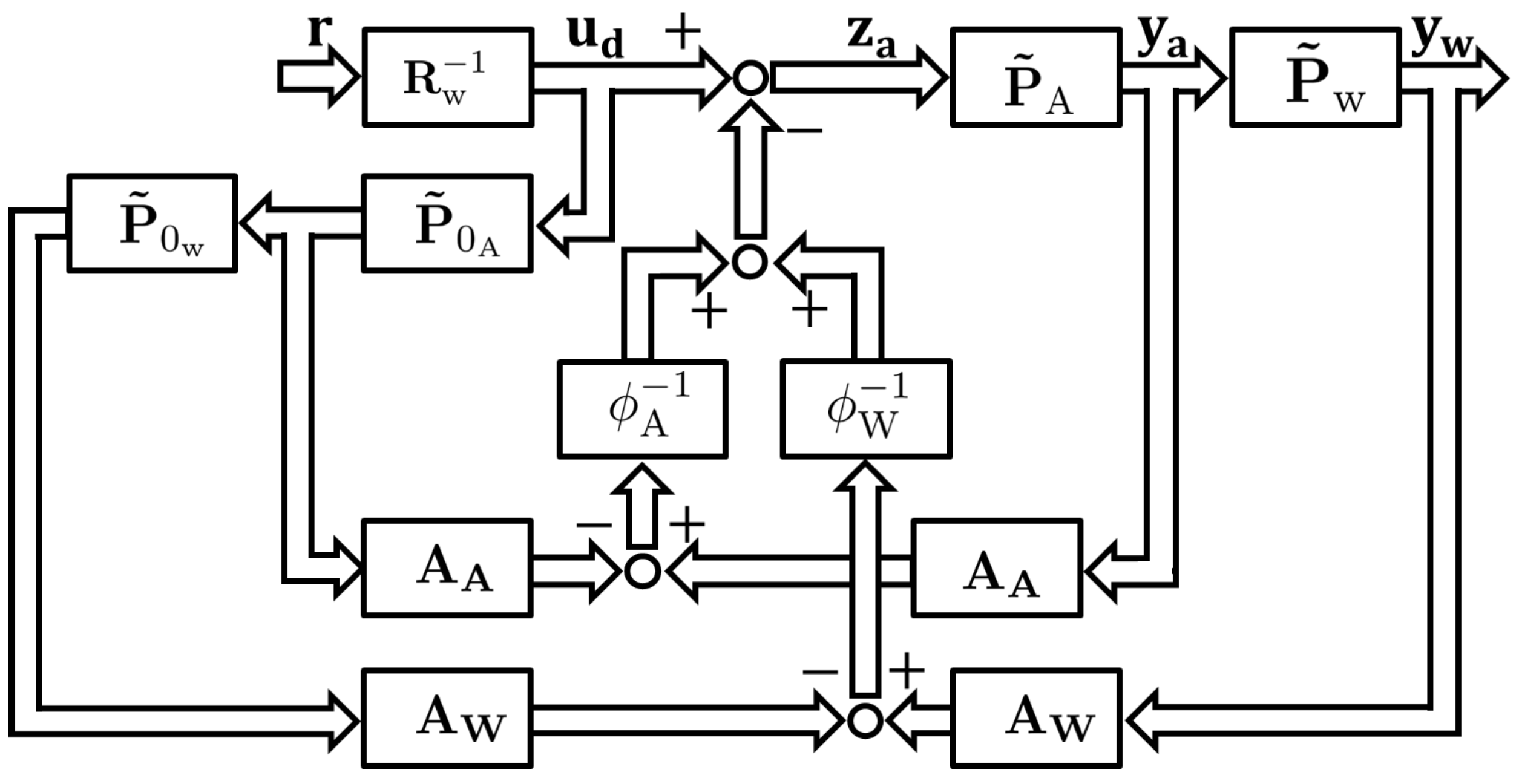
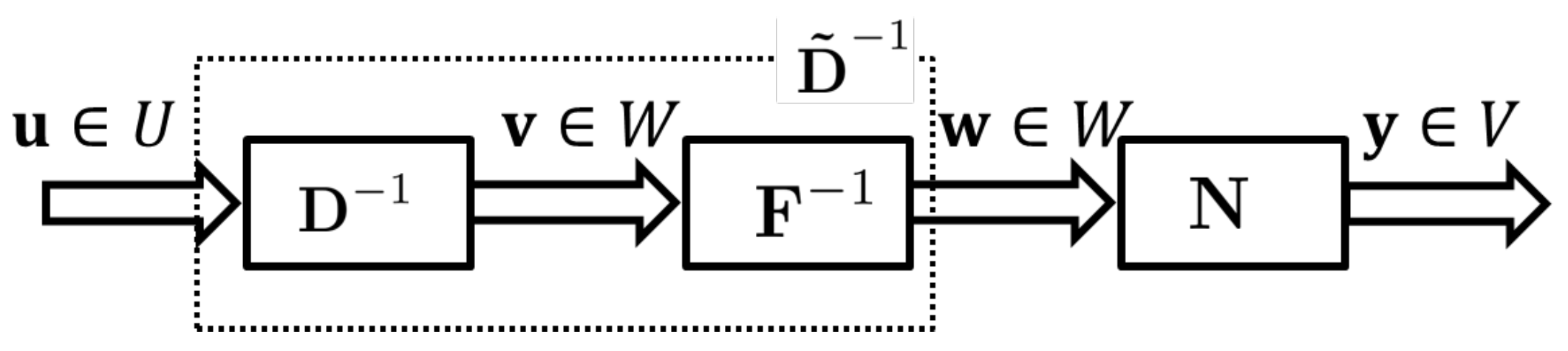
3.1. Right Factorization
3.2. Without Interference Effects
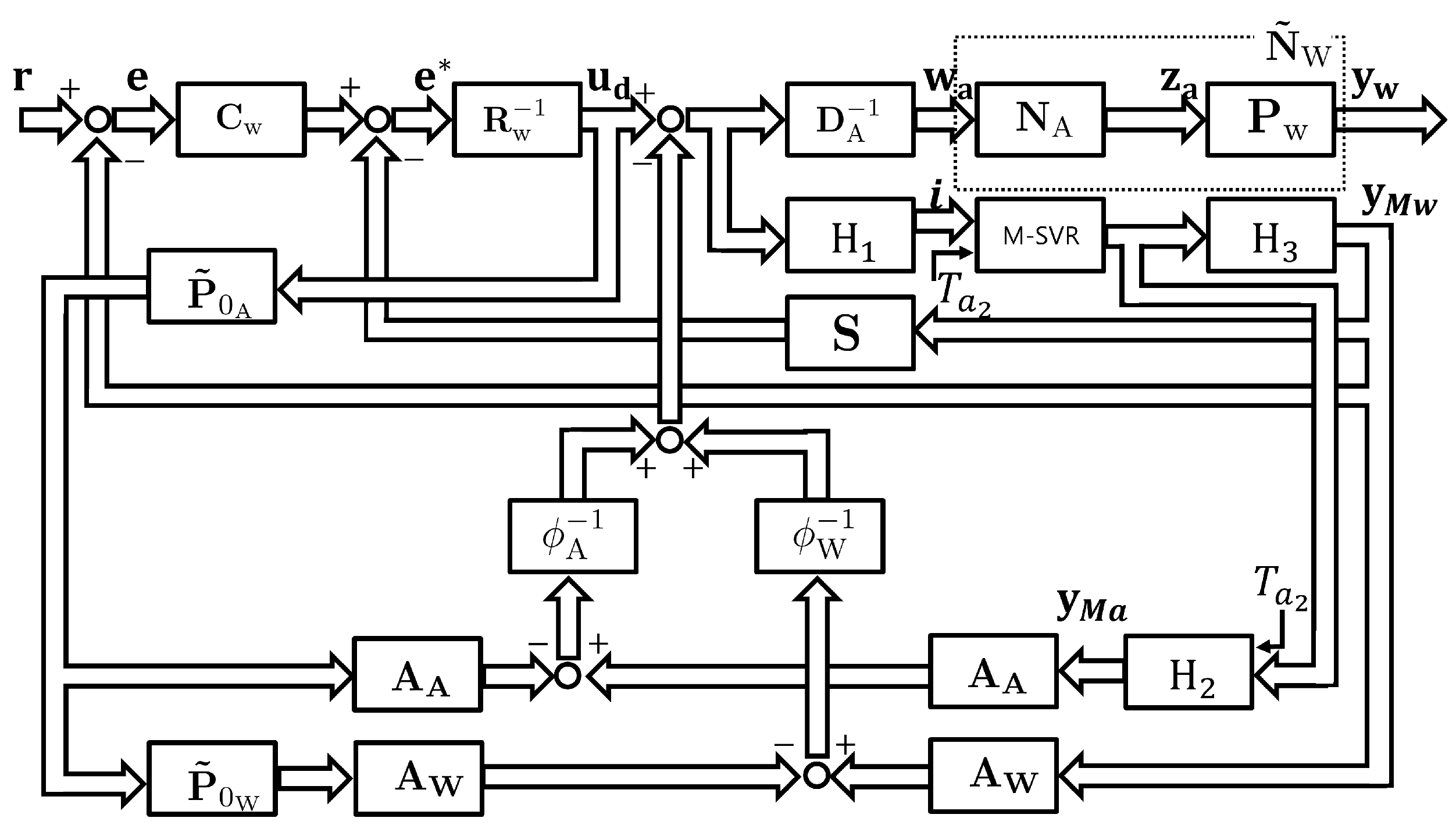
3.3. Controller Design
3.4. Sensorless Control System with M–SVR
4. Simulation and Experiment
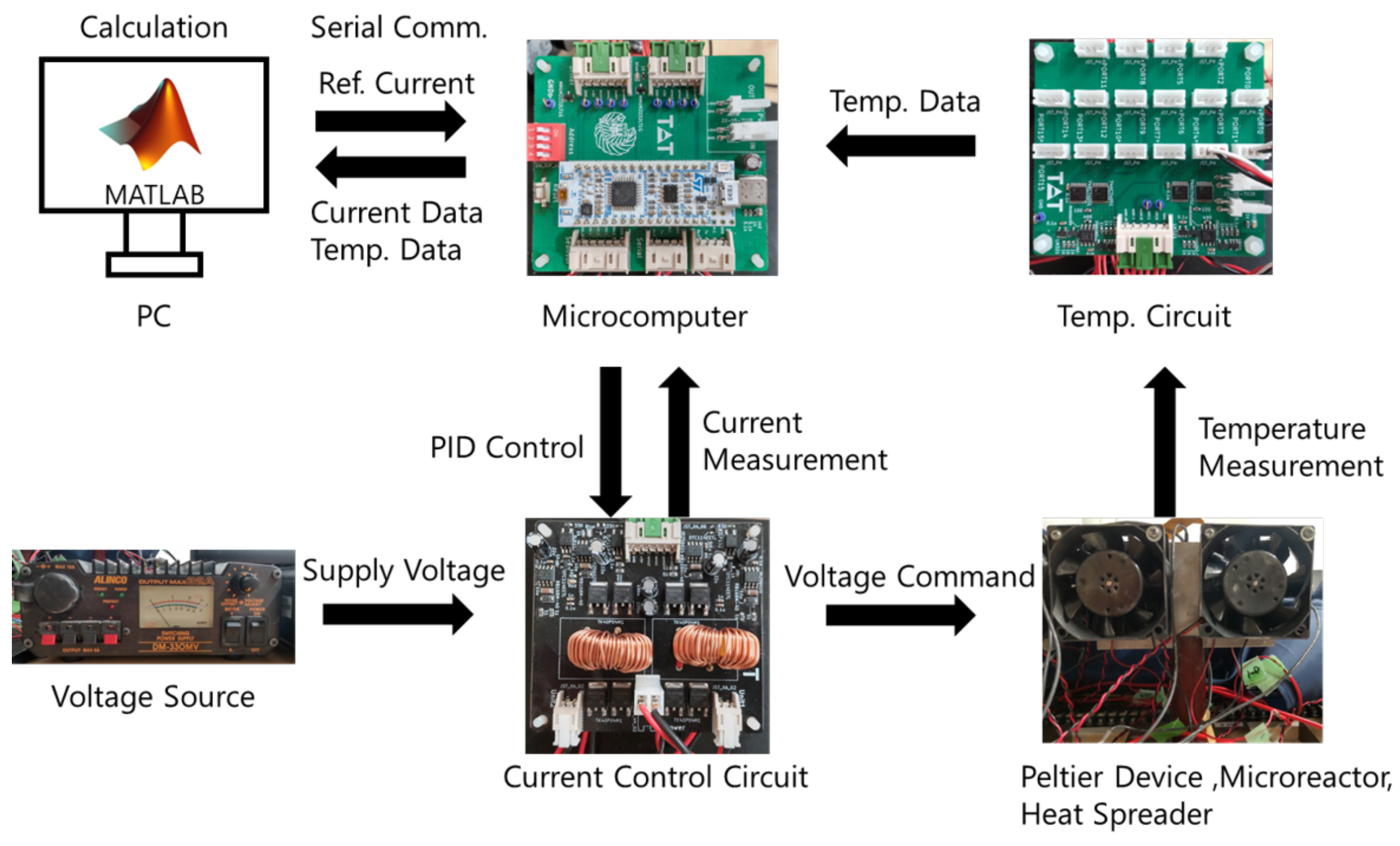
4.1. Experimental System
- Temperature acquisitionWhen the computer sends a command to the microcomputer to acquire the temperature, the microcomputer acquires the value from the temperature sensor circuit and sends the temperature value to the computer.
- Control input calculation and current value settingControl inputs are calculated from operator theory based on target and acquisition temperatures. If necessary, the control input is converted to a current value. The calculated current value is sent to the microcomputer as a command current.
- Current controlThe microcomputer performs PID control so that the current flowing through the Peltier element becomes the command current value received from the computer.
- Step 1 is repeated until the control time is reached.
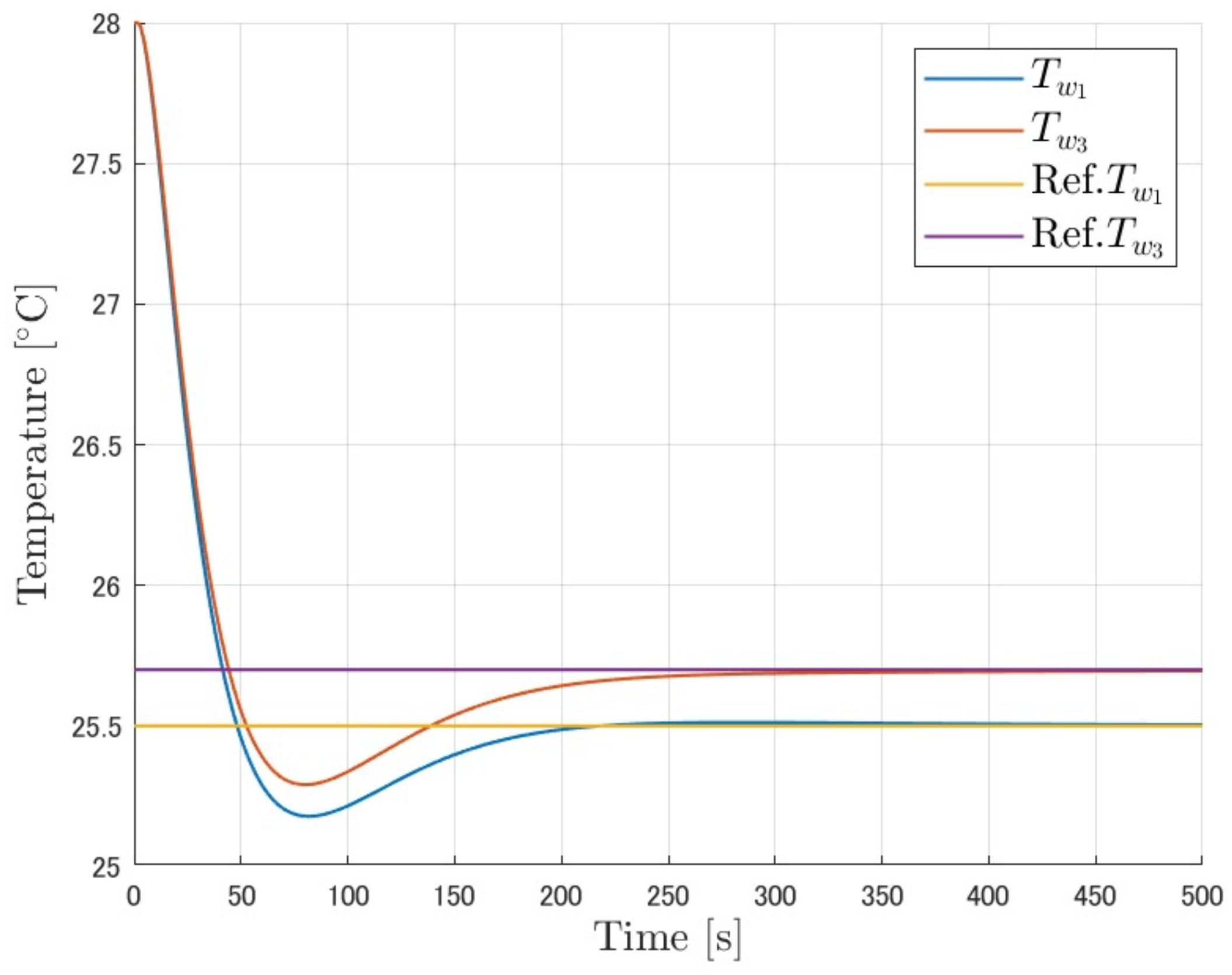
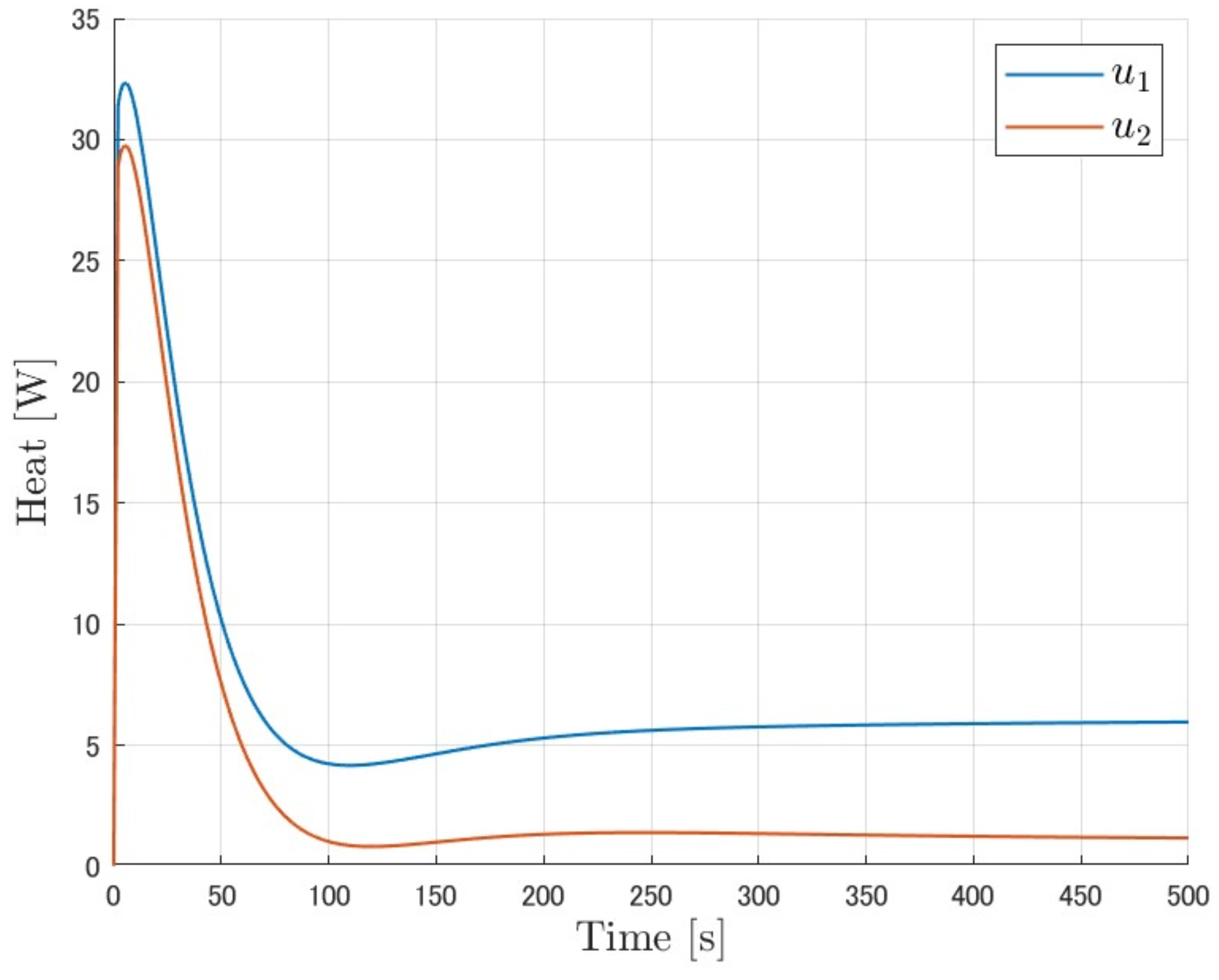
4.2. Simulation Results for MIMO Control Systems
4.3. Results of Experiment
4.3.1. MIMO Control System
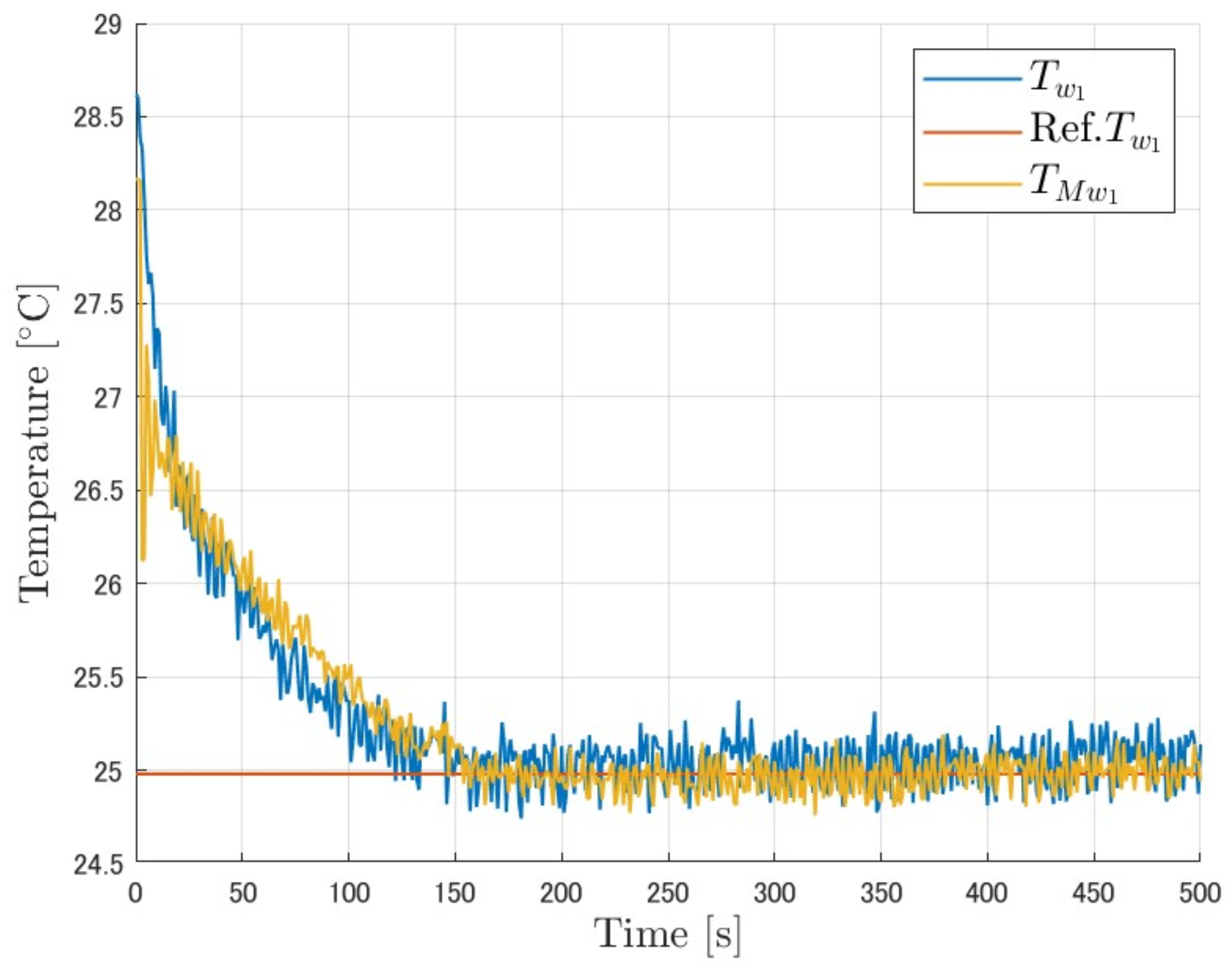
4.3.2. MIMO Sensorless Control Using M–SVR
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MIMO | Multi-input multi-output |
| M–SVR | Multi-output support vector regression |
| MSE | Mean square error |
Appendix A. Separation of Coupling Elements


Appendix B. M–SVR
- Initialize , , , and compute and .
- The solution of the next step is obtained from Equation (3). is calculated via a backtracking algorithm.
- Compute , .Return to 2 until convergence.
Appendix C. Generalized Gaussian Kernel
References
- Hinterleitner, B.; Knapp, I.; Poneder, M.; Shi, Y.; Müller, H.; Eguchi, G.; Eisenmenger-Sittner, C.; Stöger-Pollach, M.; Kakefuda, Y.; Kawamoto, N.; et al. Thermoelectric performance of a metastable thin-film Heusler alloy. Nature 2019, 576, 85–90. [Google Scholar] [CrossRef] [PubMed]
- Zhao, D.; Tan, G. A review of thermoelectric cooling: Materials, modeling and applications. Appl. Therm. Eng. 2014, 66, 15–24. [Google Scholar] [CrossRef]
- Deng, M.; Iwai, Z.; Mizumoto, I. Robust parallel compensator design for output feedback stabilization of plants with structured uncertainty. Syst. Control Lett. 1999, 36, 193–198. [Google Scholar] [CrossRef]
- Rsetam, K.; Cao, Z.; Man, Z. Design of Robust Terminal Sliding Mode Control for Underactuated Flexible Joint Robot. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 4272–4285. [Google Scholar] [CrossRef]
- Man, Z.; Paplinski, A.P.; Wu, H. A robust MIMO terminal sliding mode control for rigid robotic manipulators. IEEE Trans. Autom. Control 1994, 39, 2264–2469. [Google Scholar]
- Wang, H.; Man, Z.; Kong, H.; Zhao, Y.; Yu, M.; Cao, Z.; Zheng, J.; Do, M.T. Design and Implementation of Adaptive Terminal Sliding-Mode Control on a Steer-by-Wire Equipped Road Vehicle. IEEE Trans. Ind. Electron. 2016, 63, 5774–5785. [Google Scholar] [CrossRef]
- Yu, X.; Man, Z. Model reference adaptive control systems with terminal sliding modes. Int. J. Control 1996, 64, 1165–1176. [Google Scholar] [CrossRef]
- Deng, M. Robust Stability of Operator-Based Nonlinear Control Systems. In Operator-Based Nonlinear Control Systems: Design and Applications; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2014; pp. 27–115. [Google Scholar]
- Chen, G.; Han, Z. Robust right coprime factorization and robust stabilization of nonlinear feedback control systems. IEEE Trans. Autom. Control 1998, 43, 1505–1509. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Goto, S. Operator based Thermal Control of an Aluminum Plate with a Peltier Device. Int. J. Innov. Comput. Inf. Control 2008, 4, 3219–3229. [Google Scholar]
- Matsui, A.; Meng, L.; Hattori, K. Enhanced YOLO using Attention for Apple grading. In Proceedings of the 2023 International Conference on Advanced Mechatronic Systems (ICAMechS), Melbourne, Australia, 4–7 September 2023. [Google Scholar]
- Li, Z.; Meng, L. Research on Deep Learning-based Cross-disciplinary Applications. In Proceedings of the 2022 International Conference on Advanced Mechatronic Systems (ICAMechS), Toyama, Japan, 17–20 December 2022. [Google Scholar]
- Atsumi, M.; Kawano, S.; Morioka, T.; Meng, L. Deep Learning Based Ancient Asian Character Recognition. In Proceedings of the 2020 International Conference on Advanced Mechatronic Systems (ICAMechS), Hanoi, Vietnam, 10–13 December 2020. [Google Scholar]
- Zhang, Y.; Meng, L.; Xue, X.; Zhou, Z.; Tomiyama, H. QoE-Constrained Concurrent Request Optimization through Collaboration of Edge Servers. IEEE Internet Things J. 2019, 6, 9951–9962. [Google Scholar] [CrossRef]
- Meng, L.; Hirayama, T.; Oyanagi, S. Underwater-Drone with Panoramic Camera for Automatic Fish Recognition Based on Deep Learning. IEEE Access 2018, 6, 17880–17886. [Google Scholar] [CrossRef]
- Chen, L.; Li, X.; Ma, L.; Bi, S. Probabilistic neural network based apple classification prediction. In Proceedings of the 2022 International Conference on Advanced Mechatronic Systems (ICAMechS), Toyama, Japan, 17–20 December 2022. [Google Scholar]
- Bi, S.; Qu, X.; Ma, L.; Shen, T.; Han, C. Apple Grading Method Based on Ordered Partition Neural Network. In Proceedings of the 2021 International Conference on Advanced Mechatronic Systems (ICAMechS), Tokyo, Japan, 9–12 December 2021. [Google Scholar]
- Wang, C.; Man, Z.; Jin, J.; Ye, W. Hash-Based Convolutional Deep-thinking Pattern Classifier. In Proceedings of the 2023 International Conference on Advanced Mechatronic Systems (ICAMechS), Melbourne, Australia, 4–7 September 2023. [Google Scholar]
- Gao, X.; Yang, Q.; Zhang, J. Multi-objective optimisation for operator-based robust nonlinear control design for wireless power transfer systems. Int. J. Adv. Mechatron. Syst. 2022, 9, 203–210. [Google Scholar] [CrossRef]
- Zhang, Z.; Wen, F.; Shi, J.; He, J.; Truong, T.-K. 2D-DOA Estimation for Coherent Signals via a Polarized Uniform Rectangular Array. IEEE Signal Process. Lett. 2023, 30, 893–897. [Google Scholar] [CrossRef]
- Usami, T.; Deng, M. Applying an MSVR Method to Forecast a Three-Degree-of-Freedom Soft Actuator for a Nonlinear Position Control System: Simulation and Experiments. IEEE Syst. Man Cybern. Mag. 2022, 8, 61–69. [Google Scholar] [CrossRef]
- Bu, N.; Zhang, Y.; Li, X. Robust tracking control for uncertain micro-hand actuator with Prandtl-Ishlinskii hysteresis. Int. J. Robust Nonlinear Control 2023, 33, 9391–9405. [Google Scholar] [CrossRef]
- Bu, N.; Liu, H.; Li, W. Robust passive tracking control for an uncertain soft actuator using robust right coprime factorization. Int. J. Robust Nonlinear Control 2021, 31, 6810–6825. [Google Scholar] [CrossRef]
- Bu, N.; Wang, X. Swing–up design of double inverted pendulum by using passive control method based on operator theory. Int. J. Adv. Mechatron. Syst. 2022, 1, 1. [Google Scholar] [CrossRef]
- An, Z.; Bu, N. Modeling for a Bellow-Shaped Soft Actuator Based on Yeoh model and Operator-Based Nonlinear Control Design. In Proceedings of the 2023 International Conference on Advanced Mechatronic Systems (ICAMechS), Melbourne, Australia, 4–7 September 2023. [Google Scholar]
- Deng, M.; Saijo, N.; Gomi, H.; Inoue, A. A robust real time method for estimating human multijoint arm viscoelasticity. Int. J. Innov. Comput. Inf. Control 2006, 2, 705–721. [Google Scholar]
- Deng, M.; Inoue, A.; Zhu, Q.M. An integrated study procedure on real-time estimation of time-varying multi-joint human arm viscoelasticity. Trans. Inst. Meas. Control 2011, 33, 919–941. [Google Scholar] [CrossRef]
- Sanchez-Fernandez, M.; de-Prado-Cumplido, M.; Arenas-Garcia, J.; Arenas-Garcia, F. SVM multiregression for nonlinear channel estimation in multiple-input multiple-output systems. IEEE Trans. Signal Process. 2004, 52, 2298–2307. [Google Scholar] [CrossRef]
- Tuia, D.; Verrelst, J.; Alonso, L.; Perez-Cruz, F.; Camps-Valls, G. Multioutput Support Vector Regression for Remote Sensing Biophysical Parameter Estimation. IEEE Geosci. Remote Sens. Lett. 2011, 8, 804–808. [Google Scholar] [CrossRef]
- Ono, I.; Kita, H.; Kobayashi, A. A Real-coded Genetic Algorithm using the Unimodal Normal Distribution Crossover. In Advances in Evolutionary Computing: Theory and Applications; Ghosh, A., Tsutsui, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 213–237. [Google Scholar]
- Tsutsui, S.; Yamamura, M.; Higuchi, T. Multi-parent recombination with simplex crossover in real coded genetic algorithms. In Proceedings of the 1st Annual Conference on Genetic and Evolutionary Computation—Volume 1, Orlando, FL, USA, 13–17 July 1999. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit | Symbol | Value | Unit |
|---|---|---|---|---|---|
| Symbol | Description | Value | Unit |
|---|---|---|---|
| Initial temperature | - | [] | |
| Aluminum temperature | - | [] | |
| Water temperature | - | [] | |
| Aluminum cooling temperature | - | [] | |
| Water cooling temperature | - | [] | |
| Heat absorption from Peltier element | - | [] | |
| Specific heat of aluminum | 468 | ||
| Specific heat of water | 2174.64 | ||
| Thermal conductivity of aluminum | 238 | ||
| Thermal conductivity of water | 0.602 | ||
| Heat transfer coefficient of air | 180 | ||
| Heat transfer coefficient of water | 500 | ||
| Mass of HS | 1.31 | ||
| Mass of HS | 0.52 | ||
| Mass of Water | |||
| Mass of Water | |||
| Stefan–Boltzmann constant | |||
| Thermal emissivity of aluminum | 0.2 | - | |
| Thermal emissivity of water | 0.93 | - |
| Symbol | Description | Value |
|---|---|---|
| C | Regularization parameter | |
| Insensitive factor | ||
| Kernel coefficient for RBF |
| Symbol | Description | Value |
|---|---|---|
| C | Regularization parameter | |
| Insensitive factor | ||
| Shape parameter | ||
| Standard deviation |
| Description | |||||
|---|---|---|---|---|---|
| RBF | |||||
| GGD |
| Symbol | Description | Value | Unit |
|---|---|---|---|
| S | Seebeck coefficient | 0.08 | |
| R | Electrical resistance | 2 | |
| K | Thermal conductance | 0.43 |
| Symbol | Description | Value | Unit |
|---|---|---|---|
| Control time | 500 | ||
| Control cycle | 1 | ||
| Design parameter | 0.999 | – | |
| Design parameter | 1000 | – | |
| Design parameter | 1000 | – |
| Symbol | Description | Value | Unit |
|---|---|---|---|
| Initial temperature | 28 | ||
| Reference of Part | |||
| Reference of Part | |||
| Proportional gain of Part | – | ||
| Integral gain of Part | – |
| Symbol | Description | Value | Unit |
|---|---|---|---|
| Initial temperature | |||
| Reference of Part | |||
| Reference of Part | |||
| Proportional gain of Part | – | ||
| Integral gain of Part | – |
| Symbol | Description | Value | Unit |
|---|---|---|---|
| Initial temperature | |||
| Reference of Part | |||
| Reference of Part | |||
| Proportional gain of Part | – | ||
| Integral gain of Part | – |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kato, T.; Nishizawa, K.; Deng, M. MSVR & Operator-Based System Design of Intelligent MIMO Sensorless Control for Microreactor Devices. Computation 2024, 12, 2. https://doi.org/10.3390/computation12010002
Kato T, Nishizawa K, Deng M. MSVR & Operator-Based System Design of Intelligent MIMO Sensorless Control for Microreactor Devices. Computation. 2024; 12(1):2. https://doi.org/10.3390/computation12010002
Chicago/Turabian StyleKato, Tatsuma, Kosuke Nishizawa, and Mingcong Deng. 2024. "MSVR & Operator-Based System Design of Intelligent MIMO Sensorless Control for Microreactor Devices" Computation 12, no. 1: 2. https://doi.org/10.3390/computation12010002
APA StyleKato, T., Nishizawa, K., & Deng, M. (2024). MSVR & Operator-Based System Design of Intelligent MIMO Sensorless Control for Microreactor Devices. Computation, 12(1), 2. https://doi.org/10.3390/computation12010002