1. Introduction and Preliminaries
Different kinds of numerical schemes, especially iteration schemes were successfully applied for finding the solutions of many different kinds of functional, differential and integral operators (see e.g., [
1,
2,
3] and others). Very recently, we have observed the effectiveness of the iterative approximation schemes, in the finding of such solutions on different Banach spaces. Fixed point existence theorem suggests that under certain assumptions, any given operator has a fixed point and, in fact, this fixed point is the solution for the original underlying problem.
It is well-known that in the year 1922, Banach [
4] presented a famous result, which provides the requirements for the existence and approximation of a unique fixed point for contraction operators. Precisely, the Banach result essentially states that if
is a self contraction operator of a closed subset
of a complete normed space, that is, (
for all
and
is a fixed real number), then
attains a unique fixed point say
, that is,
, and the iterative scheme of Picard [
5],
is strongly convergent to this
for every choice of a starting point. This result is extensively used for finding the solution of many numerical problems that are available in various areas of applied mathematics and science. A mapping
is called a nonexpansive selfmap in the case if one has
for every choice of
. It has been known for many years that every nonexpansive selfmap admits a fixed point (which may not be unique) when one considers
being a uniformly convex Banach space (UCBS) and the set
closed convex and bounded (cf. [
6,
7,
8] and others). In 2008, Suzuki [
9] observed another class of selfmaps that admits a condition
. Notice that a selfmap
is said to admit a condition
(also known as STN map) iff for
, the nonexpansiveness requirement, that is,
holds whenever the condition
is satisfied. Obviously a nonexpansive selfmap is STN. Just like nonexpansive selfmaps, Suzuki [
9] showed that STN selfmaps also admit a fixed point in the setting of UCBS. By providing an example, he noted that every STN selfmap is not necessarily nonexpansive. Consequently, we conclude that the theory of STN selfmaps is essentially generalized compared to the theory of contractions and nonexpansive selfmaps. In the year 2019, Pandey et al. [
10] proposed the notion of RSTN selfmaps in the following way: a selfmap
defined on a subset
of any Banach space is called RSTN provided that for all
, it follows that
where
is any fixed real constant.
We note that the following facts are not hard to establish; however, for the sake of completeness, we include some details.
Proposition 1. If is any nonempty subset of a Banach space and consider a selfmap of with . We show that the following hold.
- (i)
If is RSTN then for every choice of and , it follows that .
- (ii)
If is STN then is RSTN.
Proof. For (i), since
is RSTN, one has a
such that
Hence
. However,
, hence (i) is proved. For (ii), since
is STN, put
, we obtain (ii). □
The converse of the Proposition 1(ii) does not hold, in general, as shown by the following example.
Example 1. Suppose and set by the following rule We choose and consider the following cases.
(i):
If we choose . Then and . Using triangle inequality, we have (ii):
If we choose and . Then and . Now (iii):
If we choose and . Then and . Now (iv):
If we choose . Then . Now Keeping above cases in mind, one can conclude that is RSTN. On the other hand, is not STN. Because, for and , as , and .
The discussion suggests that the class of RSTN maps properly includes the class of STN mappings. In 1955, Krasnoselskii [
11] showed that the sequence of Picard iterates
fails to converge to a fixed point when one replaces the class of contractions by the wider class of mappings, so-called, nonexpansive mappings. For investigation of fixed points for nonexpansive and at the same time for generalized nonexpansive mappings, some authors introduced different types of iterative schemes as follows. Notice that
is a nonempty subset of a Banach space and
.
The Mann [
12] iteration process is stated as follows:
The Ishikawa [
13] iterative process may be viewed as a two-step Mann iteration, which is given by:
In 2000, Noor [
14] provided a three-step iteration method, which includes both of the Mann and Ishikawa iteration processes as:
In 2007, Agarwal et al. [
15] suggested a new iteration meethod and noted that its rate of convergence is good as compared to the Mann iteration for contractions in Banach spaces:
In 2014, Abbas and Nazir [
1] proposed a new three-step iterative method, which converges better than all of the Picard, Mann, Ishikawa and Agarwal iterative methods for nonexpansive selfmaps, as follows:
In the year 2016, Thakur et al. [
16] constructed one of the well-known effective iterative processes as compared to the above iterative processes in the setting of STN mappings:
In 2018, Ullah and Arshad [
17] suggested the following scheme for STN mappings as follows, and showed that it has better speed of convergence than all of the above iterative schemes:
Very recently in 2020, Hassan et al. [
18] introduced a new iterative scheme for STN mappings as follows:
They observed that iterative scheme (
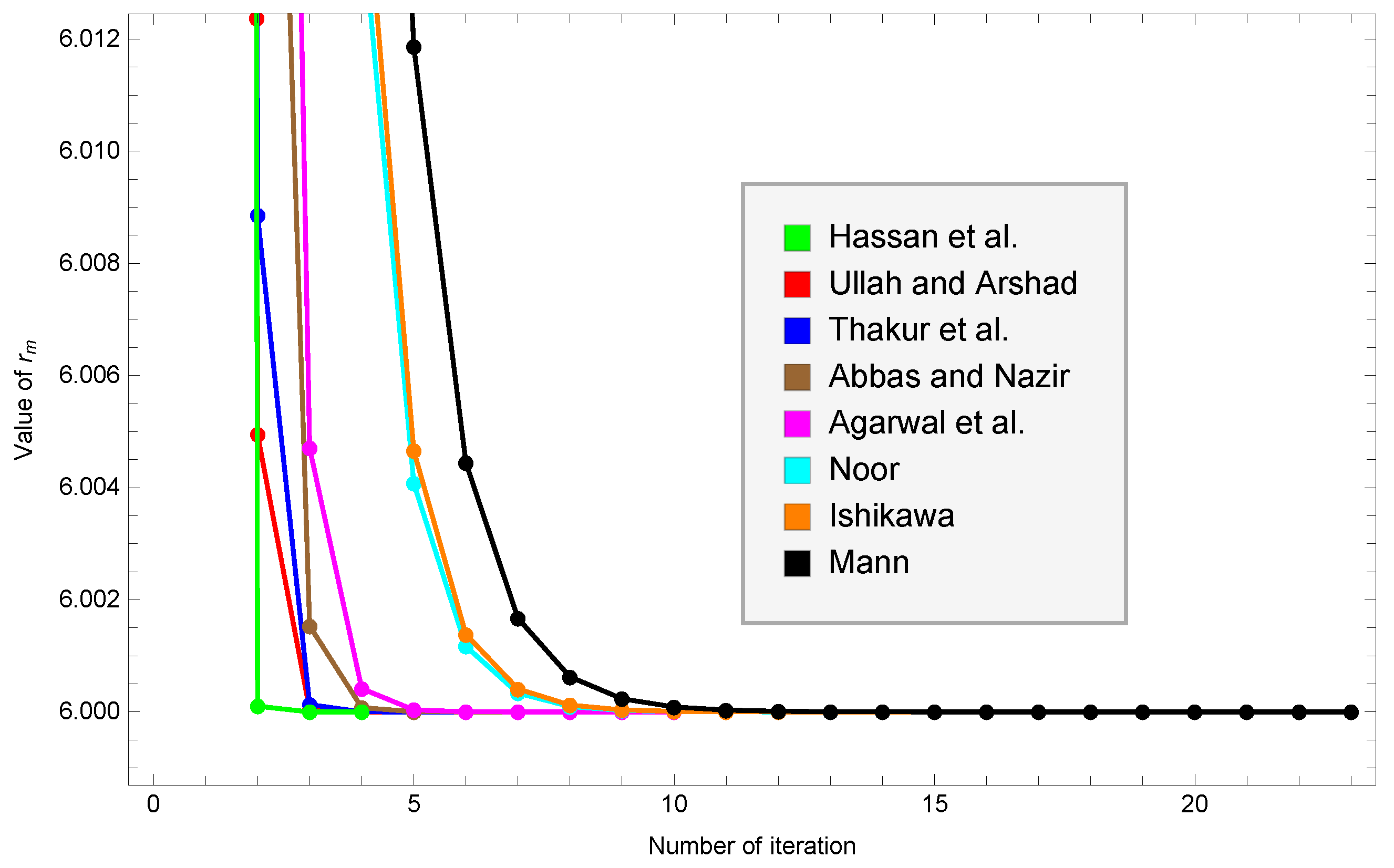
8) essentially converges in the weak as well as in the strong sense to the fixed point of a given self STN map in the case of some restrictions of the whole selfmap or on its domain. Moreover, they proved by providing a numerical example of contraction mappings that this scheme is more efficient than all of the above iterative schemes. However, we may note that they did not provide an example of STN mapping, which is not nonexpansive. In this research article, first we improve and extend the main convergence results of Hassan et al. [
18] from the context of STN maps to the more general framework of RSTN mappings. We then use the non-trivial Example 1 of RSTN maps, which exceeded the corresponding setting of STN maps. We connect the iterative scheme (
8) and some other prominent iterative schemes with this example to show the effectiveness of this research. In this way, we improve all other results of Hassan et al. [
18] from the class of STN maps to the more general setting of RSTN maps.
We now provide some definitions.
Definition 1 ([
19])
. Let a Banach space be given. If one assumes that for any weakly convergent sequence is endowed with the weak limit , such thatThen, in such a case, we called a Banach space with Opial’s property. Definition 2 ([
20])
. We say that a selfmap of a subset of any Banach space admits a condition I if there is a such that η satisfies , for and for any element . Note that represents the distance between r and the set . Definition 3. Suppose is any given Banach space and is bounded. Let be closed and convex. Then the asymptotic radius of associated with is . Moreover, the asymptotic center of with respect to is given by .
Remark 1. In the setting of UCBS [21], the property that each set has a unique element is now well-known. We also know that is essentially nonempty and convex if one can show that is weakly compact and convex [22,23]. Lemma 1 ([
10])
. Consider a Banach space and . Then every RSTN mapping with a real constant w has the following property Another important property of RSTN maps is the following.
Lemma 2 ([
10])
. Consider a Banach space and and to be RSTN. If has the Opial property and is weakly convergent to such that , then . The following key property of a UCBS
was proved in [
24].
Lemma 3. Assume that and is a UCBS. Then for some , if and in are such that , and . Then .
2. Main Results
We now establish several convergence results for RSTN maps under the iterative scheme (
8), which will extend and improve the corresponding results of Hassan et al. [
18] from the framework of STN maps to the more general setting of RSTN maps. The section begins by providing a crucial lemma as follows.
Lemma 4. Consider a UCBS and let be closed and convex. Suppose a selfmap is RSTN endowed with and is a sequence obtained from the iterative scheme (8). Then exists for all in the set . Proof. Let
. Then using (
8) along with Proposition 1(i), we have
Similarly,
Furthermore
Now (
9)–(
11) imply that
Consequently, for every fixed point of , we have obtained is non-increasing and bounded. It follows that exists for each element of . □
Theorem 1. Consider a UCBS and as closed and convex. Suppose a selfmap is RSTN and is a sequence obtained from the iterative scheme (8). Then, if and only if the iterative sequence is bounded and fulfils . Proof. To prove the required result, we consider the set
. Then for any
, Lemma 4 suggests that
is bounded and
exists. Thus, we may put
It is now our target to show
. From (
9), we see that
However, the element
is in the set
, so applying Proposition 1(i), one concludes that
Now from (
12), we have
Using this together with (
13), we obtain
From (
14) and (
16), we obtain
Using (
17), we get
Consequently, we have
By using (
13), (
15) and (
18) and applying Lemma 3, the following facts are obtained
Conversely, we consider the sequence
to be bounded and
. We try to show
. We may select any element
. Applying Lemma 1, we have
Accordingly, we obtained
. By the singletoness property of
the element
is equal to the element
, that is,
. This shows that
is nonempty. □
First, we provide a weak convergence theorem.
Theorem 2. Consider a UCBS and let be closed and convex. Suppose a selfmap is RSTN endowed with and is a sequence obtained from the iterative scheme (8). Then converges weakly to a point of provided that has Opial’s property. Proof. As
is UCBS, it is reflexive. By Theorem 1, the sequence
is bounded. Hence, the sequence
must have a weakly convergent subsequence
endowed with a weak limit, namely,
. Theorem 1 suggests that
. Applying Lemma 2, one can conclude that
. The purpose is that the element
is also the weak limit of the original sequence
. To succeed in the purpose, we assume that
is not the weak limit of
, that is,
also has a subsequence, namely,
with a weak limit, namely,
. According to Theorem 1,
. Hence, using Lemma 2, we get
. Now using Lemma 4 and Opial’s property, we have
Consequently, one can conclude that
, which is a contradiction. It follows that the element
in the domain
essentially becomes the weak limit for
too. □
After the weak convergence, we are now interested in the strong convergence theorems. First, we want to provide the following facts.
Theorem 3. Let be a UCBS, be compact and convex, and be RSTN such that . Suppose is a sequence of the iterative scheme (8). Then converges strongly to an element of Proof. Since
and
are compact, we can find a subsequence, namely,
of
such that
for some element
. Moreover, since
, according to the Theorem 1,
. Applying Lemma 1, we get
Now we conclude that
when
. In the case of Banach spaces, a convergent sequence has only one limit point. It follows that
, that is,
is fixed point for
. Furthermore, applying Lemma 4 on this
, means that
exists. One now concludes that
also becomes the strong limit element for the original sequence
. □
We have noted in the above result that the compactness of the domain played an important roll in establishing the proof. Now we suggest a statement of a strong convergence theorem in which we do not use the compactness of the domain.
Theorem 4. Suppose is a UCBS, is compact convex and is a RSTN such that . If is a sequence of the iterative scheme (8), then converges strongly to a point whenever . Proof. We neglect the proof due to the fact it is elementary. □
At last, we impose a condition on selfmap and in this way, we shall drop the compactness of the domain.
Theorem 5. Let be a UCBS, be closed and convex, and be RSTN such that . Suppose is a sequence of the iterative scheme (8) and has condition . Then converges strongly to elements of . Proof. According to Theorem 1, one can conclude that . Applying the condition I of , one obtains . It now follows from Theorem 4 that is strongly convergent in the set . □
3. Application
In some cases, a problem has a solution, but it is possible that the ordinary analytical methods may fail to find it. Thus, fixed point theory suggests in such cases an alternative technique, that is, such solutions can be found by finding a fixed point of the fixed point equation
, where
is an appropriate operator. When
is nonexpansive, it is always uniformly continuous. Now we consider a split feasibility problem (SFP) and the iterative scheme (
8). We have proved the main results for RSTN maps, which are often discontinuous on their domains. We shall apply these results on SFPs. Here, we may consider two complete inner product spaces
and
and take a
and
and assume that both of these subsets are convex and closed. We now consider a bounded linear map
and we set an SFP by the formula
It should be noted that here we shall consider the solution set
endowed with the SFP (
19) nonempty. We further assume
It is not very hard to observe the convexity and closeness of the set
. Censor and Elfving [
25] fruitfully solved an inverse problem (IP) by using the technique of an SFP. However, Byrne [
26] then constructed a well-known
-algorithm in order to solve a SFP. Consider a suitable scaler
, and suppose
and
are the projections onto the subsets
C and
Q, respectively, and assume further that
is an associated adjoint map for
. In this case, the sequence
obtained from the
-algorithm is given by the formula:
Remark 2. The operator , for is nonexpansive (see e.g., [27] and others) and the CQ-algorithm converges in the weak sense to the solution of the SFP. Now the set
endowed with the SFP is nonempty; thus, a point, namely,
must be a solution for SFP if and only if it can solve the following equation
Notice that the set
is the same as the set
, that is,
. For details, one can refer to [
28,
29].
Now we are interested in the weak and strong convergence using an alternative to the previous approaches, by RSTN maps, which are generally discontinuous on their domains (as shown by the Example 1), instead of nonexpansive maps, which are essentially continuous.
First, we discuss the weak convergence.
Theorem 6. Suppose is RSTN and is a sequence produced from (8). In this case, converges in the weak sense to a solution of the SFP (19). Proof. From the assumption, is an RSTN operator. Thus, applying Theorem 2, we obtain the required weak convergence. □
The desirable strong convergence is proved as follows.
Theorem 7. Suppose is RSTN and is a sequence produced from (8). In this case, converges in the strong sense to a solution of the SFP (19) whenever . Proof. From the assumption, is an RSTN operator. Thus, applying Theorem 4, we obtain the required strong convergence. □







{kind=link}