
Parameter Estimation of Partially Observed Turbulent Systems Using Conditional Gaussian Path-Wise Sampler



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Nonlinear Turbulent Models with Conditional Gaussian Statistics
3. The Parameter Estimation Algorithm
3.1. The General Bayesian MCMC Parameter Estimation Framework with Partial Observations
3.2. The Path-Wise Sampler of the Unobserved Trajectories
3.3. The Setup of the MCMC Algorithm
- 1.
- Assign an initial guess of the parameters . Setup the iteration index in the MCMC.
- 2.
- For to K,
- 2a.
- Sample a trajectory of the unobserved variable using the current parameter values. Compute the prior distribution and the likelihood, i.e., the right-hand side of (6).
- 2b.
- Propose a new parameter candidate for based on the adaptive MCMC algorithm.
- 2c.
- Compute the ratio of the product of the prior and the likelihood functions associated with the parameter values used in the current and the previous steps, based on the observed trajectory and the hidden trajectory generated in (2a).
- 2d.
- Accept or reject the proposed parameter values.
4. Numerical Test Experiments
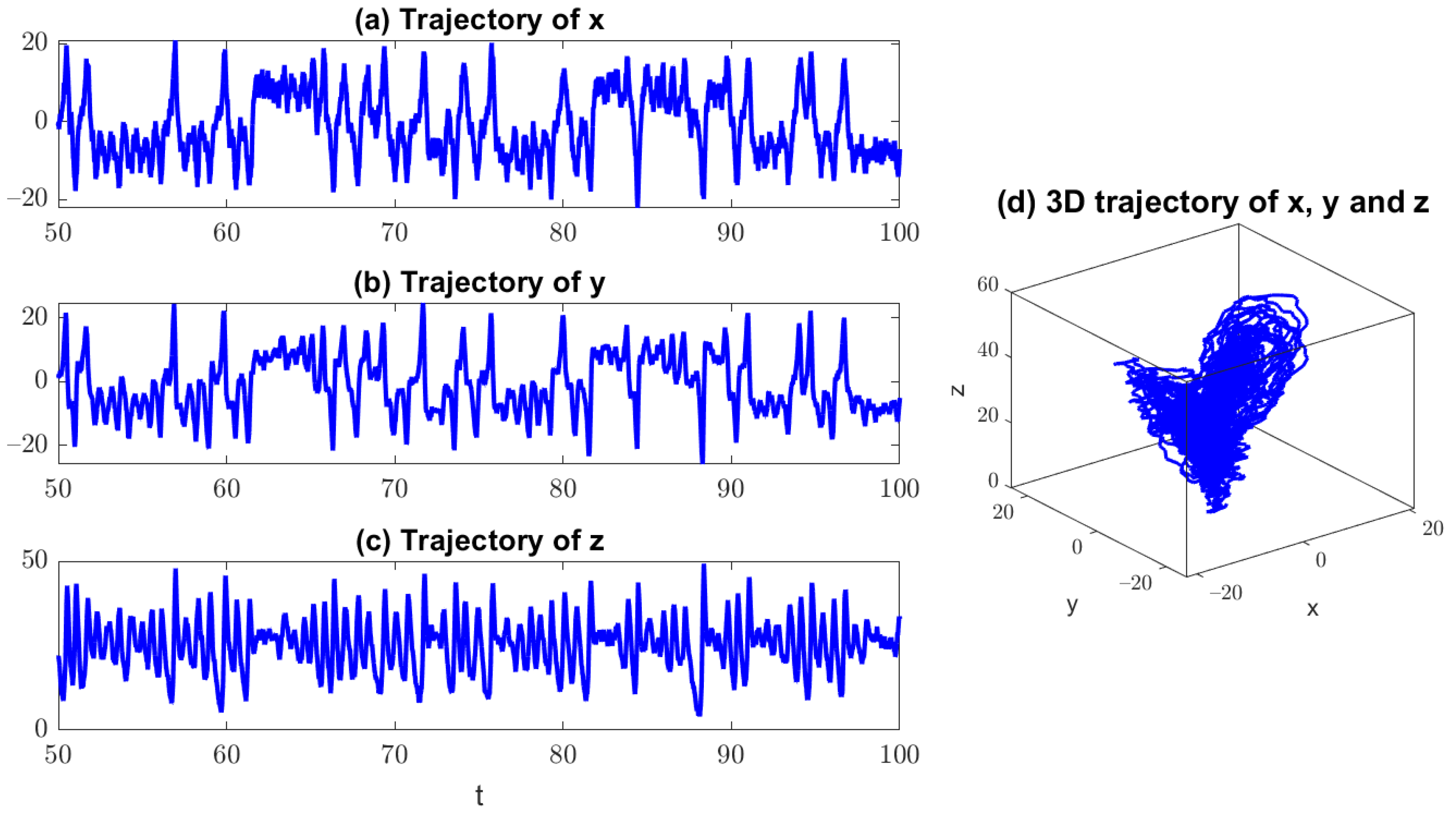
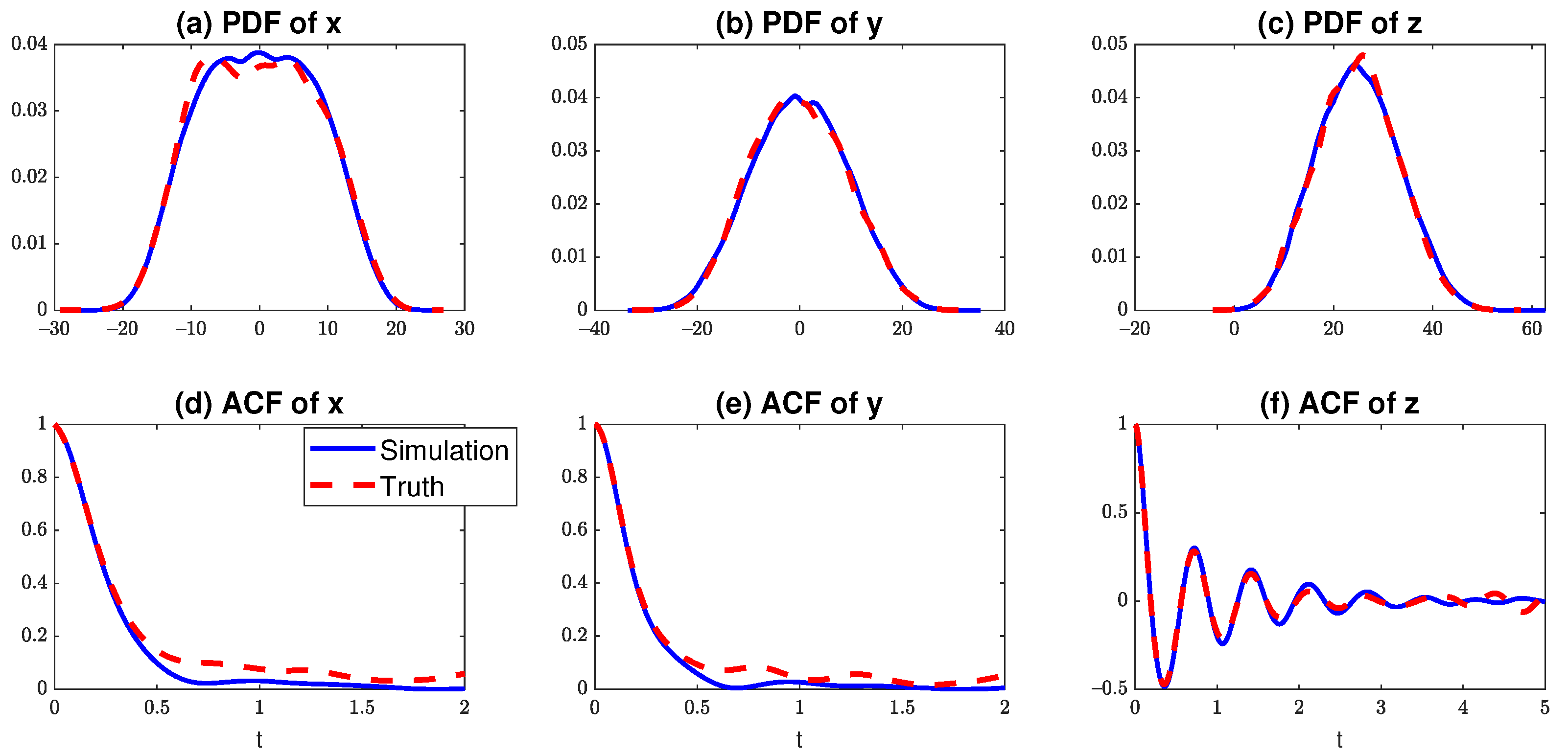
4.1. The Noisy Lorenz 63 Model
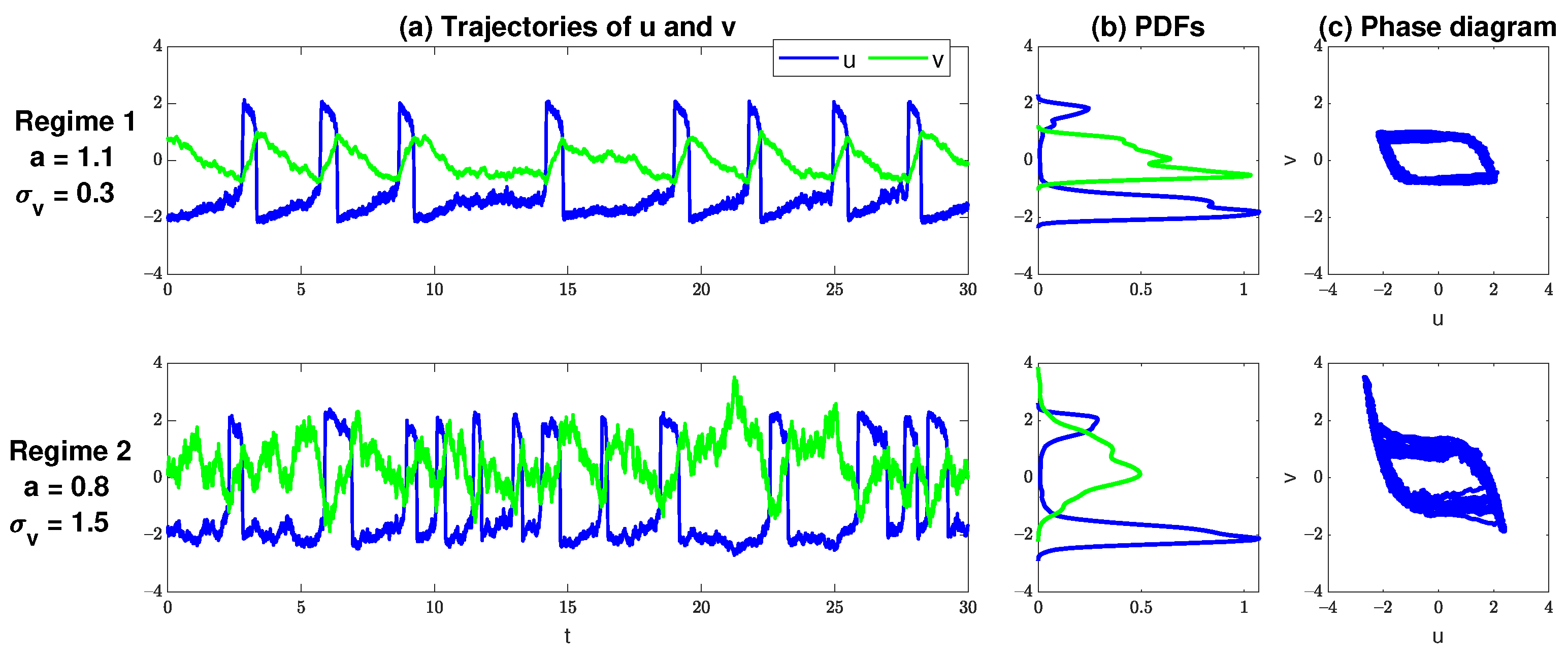
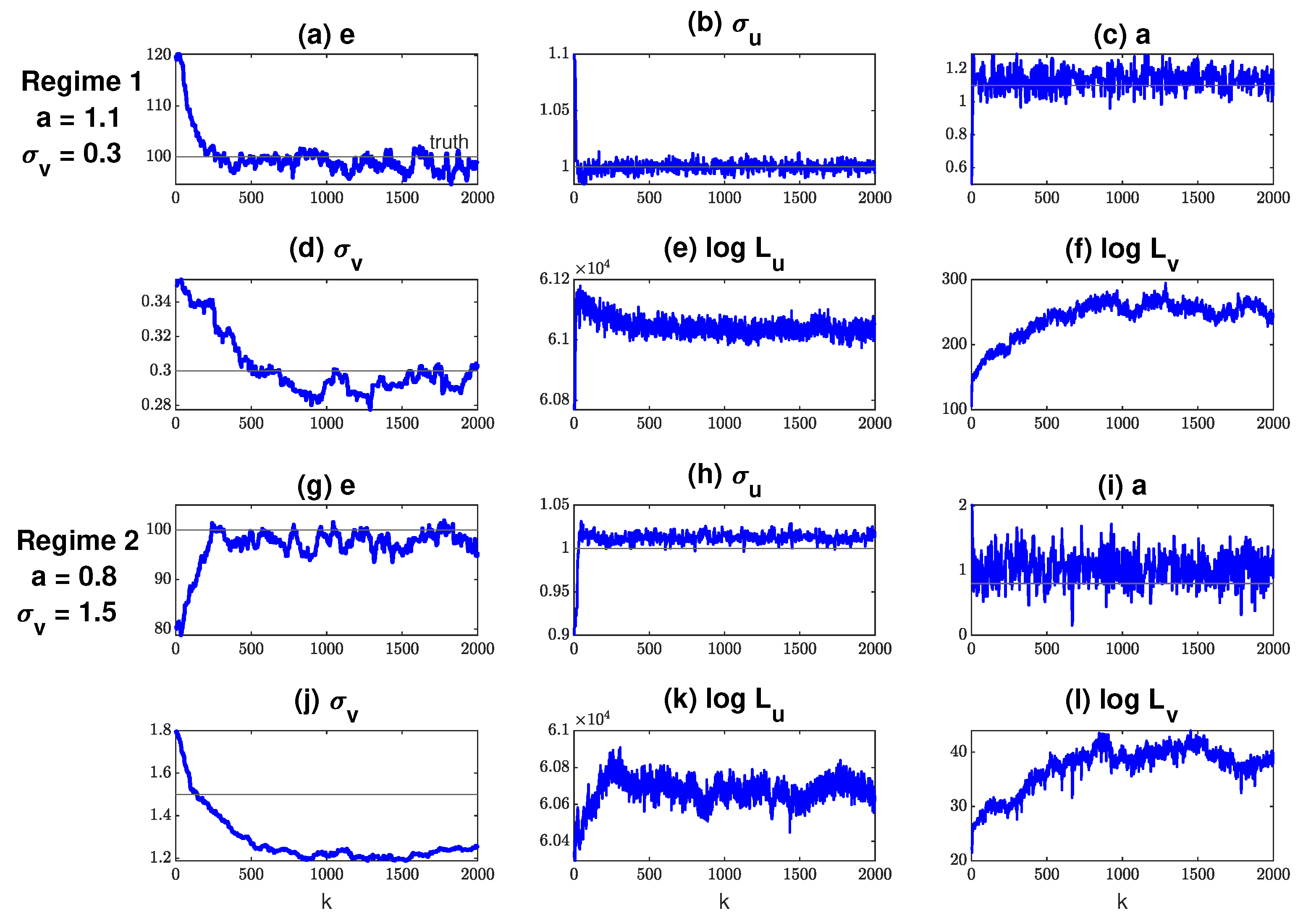
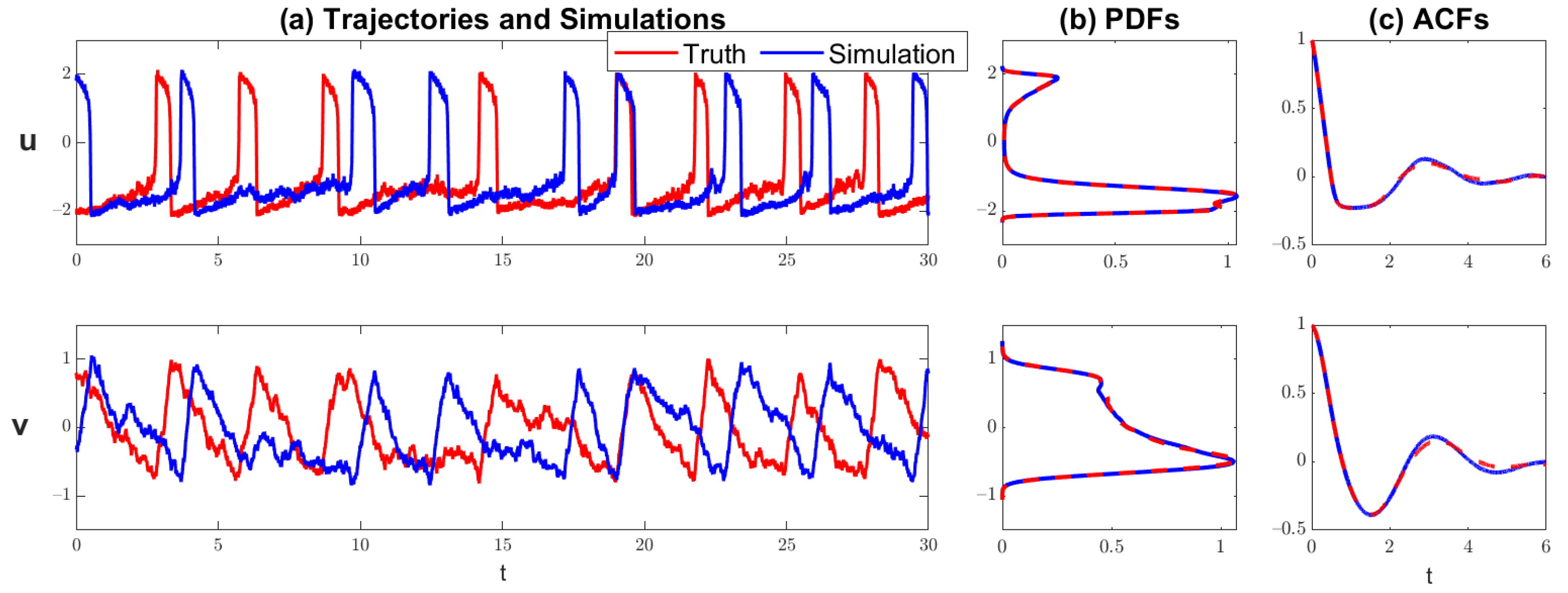
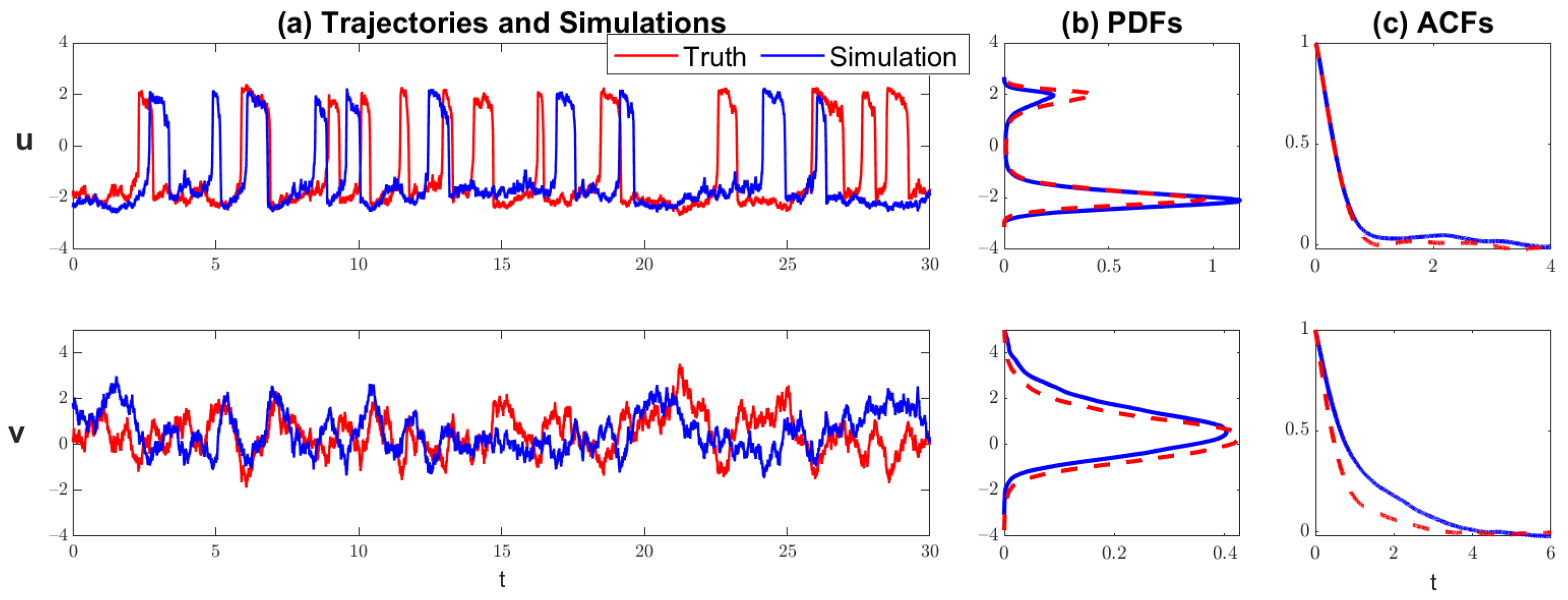
4.2. A Stochastically Coupled FitzHugh–Nagumo (FHN) Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Majda, A.J. Introduction to Turbulent Dynamical Systems in Complex Systems; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Strogatz, S.H. Nonlinear Dynamics and Chaos with Student Solutions Manual: With Applications to Physics, Biology, Chemistry, and Engineering; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Wilcox, D.C. Multiscale model for turbulent flows. AIAA J. 1988, 26, 1311–1320. [Google Scholar] [CrossRef]
- Sheard, S.A.; Mostashari, A. Principles of complex systems for systems engineering. Syst. Eng. 2009, 12, 295–311. [Google Scholar] [CrossRef]
- Law, K.; Stuart, A.; Zygalakis, K. Data Assimilation; Springer: Cham, Switzerland, 2015; Volume 214. [Google Scholar]
- Majda, A.J.; Harlim, J. Filtering Complex Turbulent Systems; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Farazmand, M.; Sapsis, T.P. Extreme events: Mechanisms and prediction. Appl. Mech. Rev. 2019, 71, 050801. [Google Scholar] [CrossRef] [Green Version]
- Moffatt, H. Extreme events in turbulent flow. J. Fluid Mech. 2021, 914. [Google Scholar] [CrossRef]
- Majda, A.J.; Branicki, M. Lessons in uncertainty quantification for turbulent dynamical systems. Discret. Contin. Dyn. Syst. A 2012, 32, 3133–3221. [Google Scholar] [CrossRef] [Green Version]
- Vlachas, P.R.; Byeon, W.; Wan, Z.Y.; Sapsis, T.P.; Koumoutsakos, P. Data-driven forecasting of high-dimensional chaotic systems with long short-term memory networks. Proc. R. Soc. A Math. Phys. Eng. Sci. 2018, 474, 20170844. [Google Scholar] [CrossRef] [Green Version]
- Feigenbaum, M.J. The transition to aperiodic behavior in turbulent systems. Commun. Math. Phys. 1980, 77, 65–86. [Google Scholar] [CrossRef]
- Bertozzi, A.L.; Luo, X.; Stuart, A.M.; Zygalakis, K.C. Uncertainty quantification in the classification of high dimensional data. arXiv 2017, arXiv:1703.08816. [Google Scholar]
- Köppen, M. The curse of dimensionality. In Proceedings of the 5th Online World Conference on Soft Computing in Industrial Applications (WSC5), Online, 4–8 September 2000; Volume 1, pp. 4–8. [Google Scholar]
- Chen, N.; Majda, A.J. Efficient statistically accurate algorithms for the Fokker—Planck equation in large dimensions. J. Comput. Phys. 2018, 354, 242–268. [Google Scholar] [CrossRef] [Green Version]
- Gershgorin, B.; Majda, A.J. Filtering a statistically exactly solvable test model for turbulent tracers from partial observations. J. Comput. Phys. 2011, 230, 1602–1638. [Google Scholar] [CrossRef]
- Kalnay, E. Atmospheric Modeling, Data Assimilation and Predictability; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Lau, W.K.M.; Waliser, D.E. Intraseasonal Variability in the Atmosphere-Ocean Climate System; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Vallis, G.K. Atmospheric and Oceanic Fluid Dynamics; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Salmon, R. Lectures on Geophysical Fluid Dynamics; Oxford University Press: Oxford, UK, 1998. [Google Scholar]
- Majda, A.J.; Chen, N. Model error, information barriers, state estimation and prediction in complex multiscale systems. Entropy 2018, 20, 644. [Google Scholar] [CrossRef] [Green Version]
- Schittkowski, K. Numerical Data Fitting in Dynamical Systems: A Practical Introduction with Applications and Software; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002; Volume 77. [Google Scholar]
- Särkkä, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013; Volume 3. [Google Scholar]
- Rodriguez-Fernandez, M.; Mendes, P.; Banga, J.R. A hybrid approach for efficient and robust parameter estimation in biochemical pathways. Biosystems 2006, 83, 248–265. [Google Scholar] [CrossRef]
- Kokkala, J.; Solin, A.; Särkkä, S. Expectation maximization based parameter estimation by sigma-point and particle smoothing. In Proceedings of the 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Chen, N. Learning nonlinear turbulent dynamics from partial observations via analytically solvable conditional statistics. J. Comput. Phys. 2020, 418, 109635. [Google Scholar] [CrossRef]
- Jia, H.; Zhang, Z.; Liu, H.; Dai, F.; Liu, Y.; Leng, J. An approach based on expectation-maximization algorithm for parameter estimation of Lamb wave signals. Mech. Syst. Signal Process. 2019, 120, 341–355. [Google Scholar] [CrossRef]
- Yokoyama, N. Parameter estimation of aircraft dynamics via unscented smoother with expectation-maximization algorithm. J. Guid. Control. Dyn. 2011, 34, 426–436. [Google Scholar] [CrossRef]
- Beck, J.V.; Arnold, K.J. Parameter Estimation in Engineering and Science; Wiley: Hoboken, NJ, USA, 1977. [Google Scholar]
- Aster, R.C.; Borchers, B.; Thurber, C.H. Parameter Estimation and Inverse Problems; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; SIAM: Philadelphia, PA, USA, 2005. [Google Scholar]
- Biegler, L.; Damiano, J.; Blau, G. Nonlinear parameter estimation: A case study comparison. AIChE J. 1986, 32, 29–45. [Google Scholar] [CrossRef]
- Van den Bos, A. Parameter Estimation for Scientists and Engineers; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Branicki, M.; Chen, N.; Majda, A.J. Non-Gaussian test models for prediction and state estimation with model errors. Chin. Ann. Math. Ser. B 2013, 34, 29–64. [Google Scholar] [CrossRef] [Green Version]
- Richey, M. The evolution of Markov chain Monte Carlo methods. Am. Math. Mon. 2010, 117, 383–413. [Google Scholar] [CrossRef] [Green Version]
- Haario, H.; Laine, M.; Mira, A.; Saksman, E. DRAM: Efficient adaptive MCMC. Stat. Comput. 2006, 16, 339–354. [Google Scholar] [CrossRef]
- Raftery, A.E.; Lewis, S.M. Implementing mcmc. Markov chain Monte Carlo in Practice; CRC Press: Boca Raton, FL, USA, 1995; pp. 115–130. [Google Scholar]
- Tanner, M.A.; Wong, W.H. The calculation of posterior distributions by data augmentation. J. Am. Stat. Assoc. 1987, 82, 528–540. [Google Scholar] [CrossRef]
- Roberts, G.O.; Stramer, O. On inference for partially observed nonlinear diffusion models using the Metropolis–Hastings algorithm. Biometrika 2001, 88, 603–621. [Google Scholar] [CrossRef] [Green Version]
- Beskos, A.; Roberts, G.O. Exact simulation of diffusions. Ann. Appl. Probab. 2005, 15, 2422–2444. [Google Scholar] [CrossRef] [Green Version]
- Cotter, S.L.; Roberts, G.O.; Stuart, A.M.; White, D. MCMC methods for functions: Modifying old algorithms to make them faster. Stat. Sci. 2013, 28, 424–446. [Google Scholar] [CrossRef]
- Chib, S.; Pitt, M.K.; Shephard, N. Likelihood Based Inference for Diffusion Driven Models. 2004. Available online: http://www.nuff.ox.ac.uk/economics/papers/2004/w20/chibpittshephard.pdf (accessed on 1 August 2004).
- Kalogeropoulos, K. Likelihood-based inference for a class of multivariate diffusions with unobserved paths. J. Stat. Plan. Inference 2007, 137, 3092–3102. [Google Scholar] [CrossRef] [Green Version]
- Papaspiliopoulos, O.; Roberts, G.O.; Stramer, O. Data augmentation for diffusions. J. Comput. Graph. Stat. 2013, 22, 665–688. [Google Scholar] [CrossRef] [Green Version]
- Stramer, O.; Bognar, M. Bayesian inference for irreducible diffusion processes using the pseudo-marginal approach. Bayesian Anal. 2011, 6, 231–258. [Google Scholar] [CrossRef]
- Chen, N.; Giannakis, D.; Herbei, R.; Majda, A.J. An MCMC algorithm for parameter estimation in signals with hidden intermittent instability. SIAM/ASA J. Uncertain. Quantif. 2014, 2, 647–669. [Google Scholar] [CrossRef] [Green Version]
- Golightly, A.; Wilkinson, D.J. Bayesian inference for stochastic kinetic models using a diffusion approximation. Biometrics 2005, 61, 781–788. [Google Scholar] [CrossRef]
- Golightly, A.; Wilkinson, D.J. Bayesian sequential inference for nonlinear multivariate diffusions. Stat. Comput. 2006, 16, 323–338. [Google Scholar] [CrossRef]
- Golightly, A.; Wilkinson, D.J. Bayesian sequential inference for stochastic kinetic biochemical network models. J. Comput. Biol. 2006, 13, 838–851. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A. Conditional Gaussian systems for multiscale nonlinear stochastic systems: Prediction, state estimation and uncertainty quantification. Entropy 2018, 20, 509. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, N.; Majda, A.J. Filtering nonlinear turbulent dynamical systems through conditional Gaussian statistics. Mon. Weather Rev. 2016, 144, 4885–4917. [Google Scholar] [CrossRef]
- Liptser, R.S.; Shiryaev, A.N. Statistics of Random Processes II: Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 6. [Google Scholar]
- Chen, N.; Majda, A.J.; Tong, X.T. Information barriers for noisy Lagrangian tracers in filtering random incompressible flows. Nonlinearity 2014, 27, 2133. [Google Scholar] [CrossRef] [Green Version]
- Chen, N.; Majda, A.J.; Tong, X.T. Noisy Lagrangian tracers for filtering random rotating compressible flows. J. Nonlinear Sci. 2015, 25, 451–488. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J. Model error in filtering random compressible flows utilizing noisy Lagrangian tracers. Mon. Weather Rev. 2016, 144, 4037–4061. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J.; Giannakis, D. Predicting the cloud patterns of the Madden-Julian Oscillation through a low-order nonlinear stochastic model. Geophys. Res. Lett. 2014, 41, 5612–5619. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J. Predicting the real-time multivariate Madden–Julian oscillation index through a low-order nonlinear stochastic model. Mon. Weather Rev. 2015, 143, 2148–2169. [Google Scholar] [CrossRef]
- Chen, N.; Majda, A.J.; Sabeerali, C.; Ajayamohan, R. Predicting monsoon intraseasonal precipitation using a low-order nonlinear stochastic model. J. Clim. 2018, 31, 4403–4427. [Google Scholar] [CrossRef] [Green Version]
- Chen, N.; Majda, A.J. Beating the curse of dimension with accurate statistics for the Fokker—Planck equation in complex turbulent systems. Proc. Natl. Acad. Sci. USA 2017, 114, 12864–12869. [Google Scholar] [CrossRef] [Green Version]
- Chen, N.; Majda, A.J.; Tong, X.T. Spatial localization for nonlinear dynamical stochastic models for excitable media. arXiv 2019, arXiv:1901.07318. [Google Scholar] [CrossRef] [Green Version]
- Oksendal, B. Stochastic Differential Equations: An Introduction with Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Chen, N.; Majda, A.J. Efficient Nonlinear Optimal Smoothing and Sampling Algorithms for Complex Turbulent Nonlinear Dynamical Systems with Partial Observations. J. Comput. Phys. 2020, 410, 109381. [Google Scholar] [CrossRef]
- Vihola, M. Robust adaptive Metropolis algorithm with coerced acceptance rate. Stat. Comput. 2012, 22, 997–1008. [Google Scholar] [CrossRef] [Green Version]
- Gardiner, C.W. Handbook of Stochastic Methods for Physics, Chemistry and the Natural Sciences; Springer: Berlin/Heidelberg, Germany, 2004; Volume 13. [Google Scholar]
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Sparrow, C. The Lorenz Equations: Bifurcations, Chaos, and Strange Attractors; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 41. [Google Scholar]
- Haken, H. Analogy between higher instabilities in fluids and lasers. Phys. Lett. A 1975, 53, 77–78. [Google Scholar] [CrossRef]
- Knobloch, E. Chaos in the segmented disc dynamo. Phys. Lett. A 1981, 82, 439–440. [Google Scholar] [CrossRef]
- Gorman, M.; Widmann, P.; Robbins, K. Nonlinear dynamics of a convection loop: A quantitative comparison of experiment with theory. Phys. D Nonlinear Phenom. 1986, 19, 255–267. [Google Scholar] [CrossRef]
- Hemati, N. Strange attractors in brushless DC motors. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1994, 41, 40–45. [Google Scholar] [CrossRef]
- Cuomo, K.M.; Oppenheim, A.V. Circuit implementation of synchronized chaos with applications to communications. Phys. Rev. Lett. 1993, 71, 65. [Google Scholar] [CrossRef] [PubMed]
- Poland, D. Cooperative catalysis and chemical chaos: A chemical model for the Lorenz equations. Phys. D Nonlinear Phenom. 1993, 65, 86–99. [Google Scholar] [CrossRef]
- Tzenov, S.I. Strange attractors characterizing the osmotic instability. arXiv 2014, arXiv:1406.0979. [Google Scholar]
- Lindner, B.; Garcıa-Ojalvo, J.; Neiman, A.; Schimansky-Geier, L. Effects of noise in excitable systems. Phys. Rep. 2004, 392, 321–424. [Google Scholar] [CrossRef]
- Treutlein, H.; Schulten, K. Noise Induced Limit Cycles of the Bonhoeffer-Van der Pol Model of Neural Pulses. Ber. Bunsenges Phys. Chem. 1985, 89, 710–718. [Google Scholar] [CrossRef]
- Lindner, B.; Schimansky-Geier, L. Coherence and stochastic resonance in a two-state system. Phys. Rev. E 2000, 61, 6103. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Longtin, A. Stochastic resonance in neuron models. J. Stat. Phys. 1993, 70, 309–327. [Google Scholar] [CrossRef] [Green Version]
- Wiesenfeld, K.; Pierson, D.; Pantazelou, E.; Dames, C.; Moss, F. Stochastic resonance on a circle. Phys. Rev. Lett. 1994, 72, 2125. [Google Scholar] [CrossRef]
- Neiman, A.; Schimansky-Geier, L.; Cornell-Bell, A.; Moss, F. Noise-enhanced phase synchronization in excitable media. Phys. Rev. Lett. 1999, 83, 4896. [Google Scholar] [CrossRef]
- Hempel, H.; Schimansky-Geier, L.; Garcia-Ojalvo, J. Noise-sustained pulsating patterns and global oscillations in subexcitable media. Phys. Rev. Lett. 1999, 82, 3713. [Google Scholar] [CrossRef]
- Hu, B.; Zhou, C. Phase synchronization in coupled nonidentical excitable systems and array-enhanced coherence resonance. Phys. Rev. E 2000, 61, R1001. [Google Scholar] [CrossRef] [Green Version]
- Jung, P.; Cornell-Bell, A.; Madden, K.S.; Moss, F. Noise-induced spiral waves in astrocyte syncytia show evidence of self-organized criticality. J. Neurophysiol. 1998, 79, 1098–1101. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Chen, N. Parameter Estimation of Partially Observed Turbulent Systems Using Conditional Gaussian Path-Wise Sampler. Computation 2021, 9, 91. https://doi.org/10.3390/computation9080091
Zhang Z, Chen N. Parameter Estimation of Partially Observed Turbulent Systems Using Conditional Gaussian Path-Wise Sampler. Computation. 2021; 9(8):91. https://doi.org/10.3390/computation9080091
Chicago/Turabian StyleZhang, Ziheng, and Nan Chen. 2021. "Parameter Estimation of Partially Observed Turbulent Systems Using Conditional Gaussian Path-Wise Sampler" Computation 9, no. 8: 91. https://doi.org/10.3390/computation9080091
APA StyleZhang, Z., & Chen, N. (2021). Parameter Estimation of Partially Observed Turbulent Systems Using Conditional Gaussian Path-Wise Sampler. Computation, 9(8), 91. https://doi.org/10.3390/computation9080091