Liquid Metal Based Flexible and Implantable Biosensors




Abstract
:1. Introduction
2. Properties
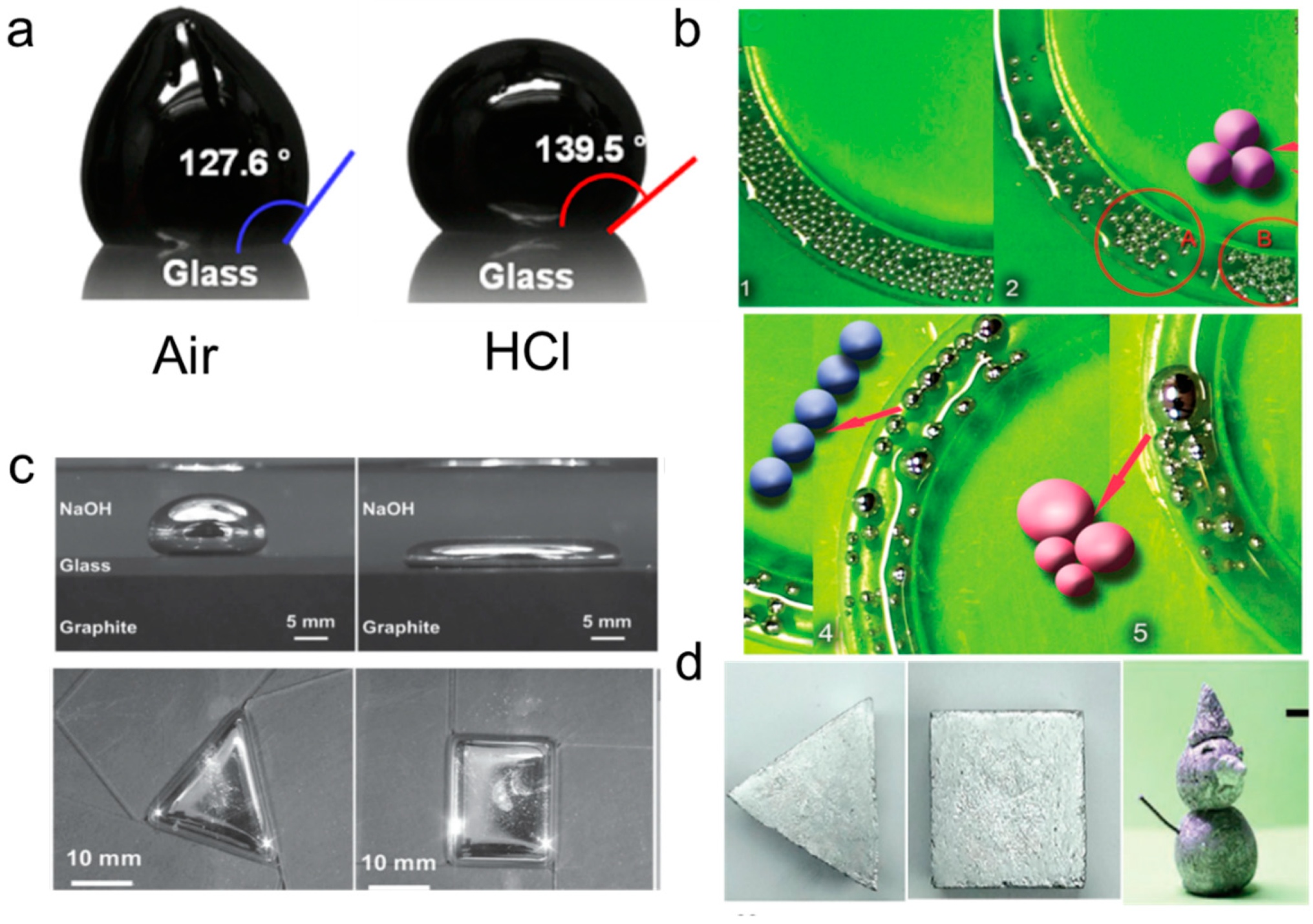
2.1. Morphology
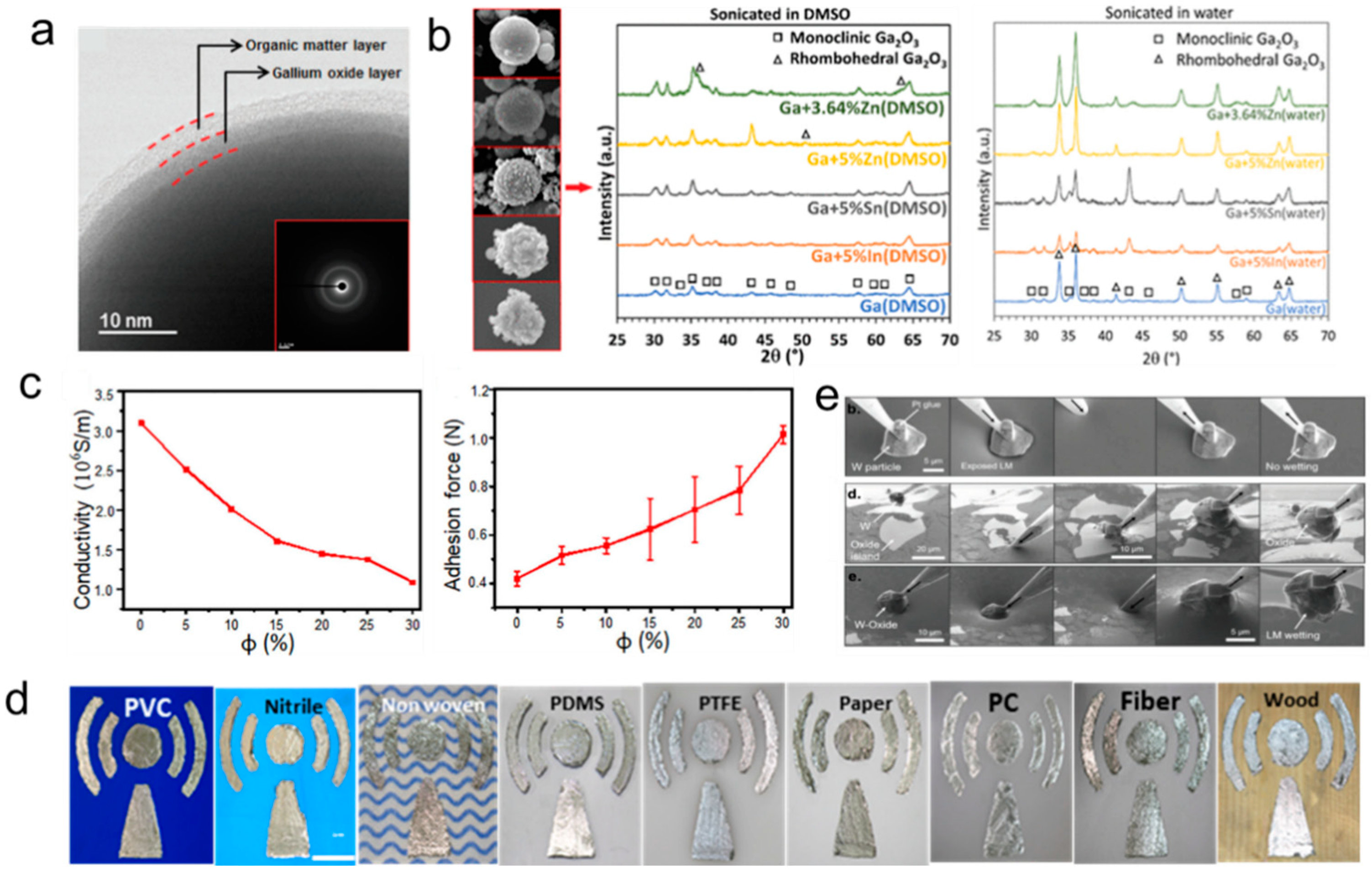
2.2. Oxidation
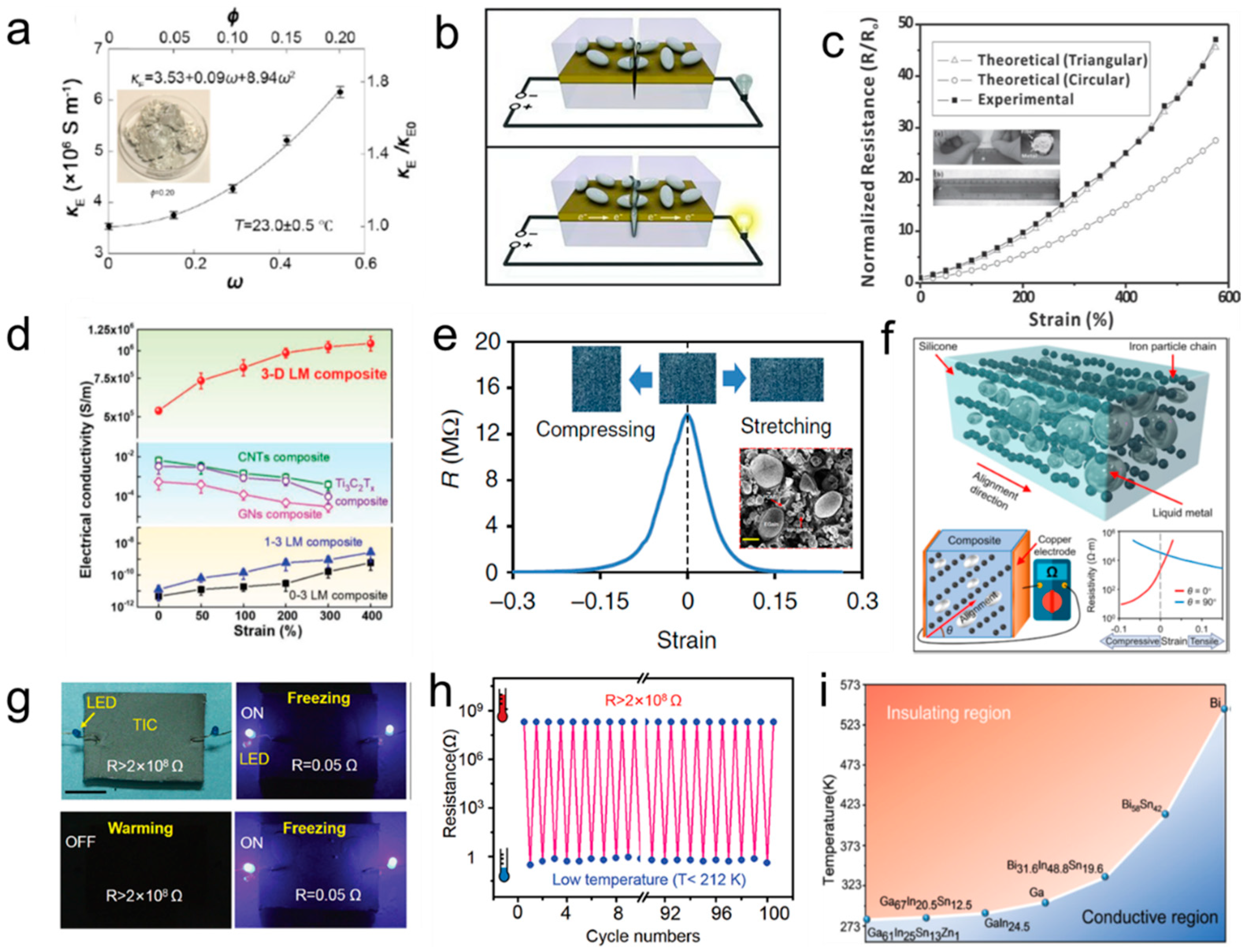
2.3. Electrical Properties of Liquid Metal and Its Composite
2.4. Biocompatibility
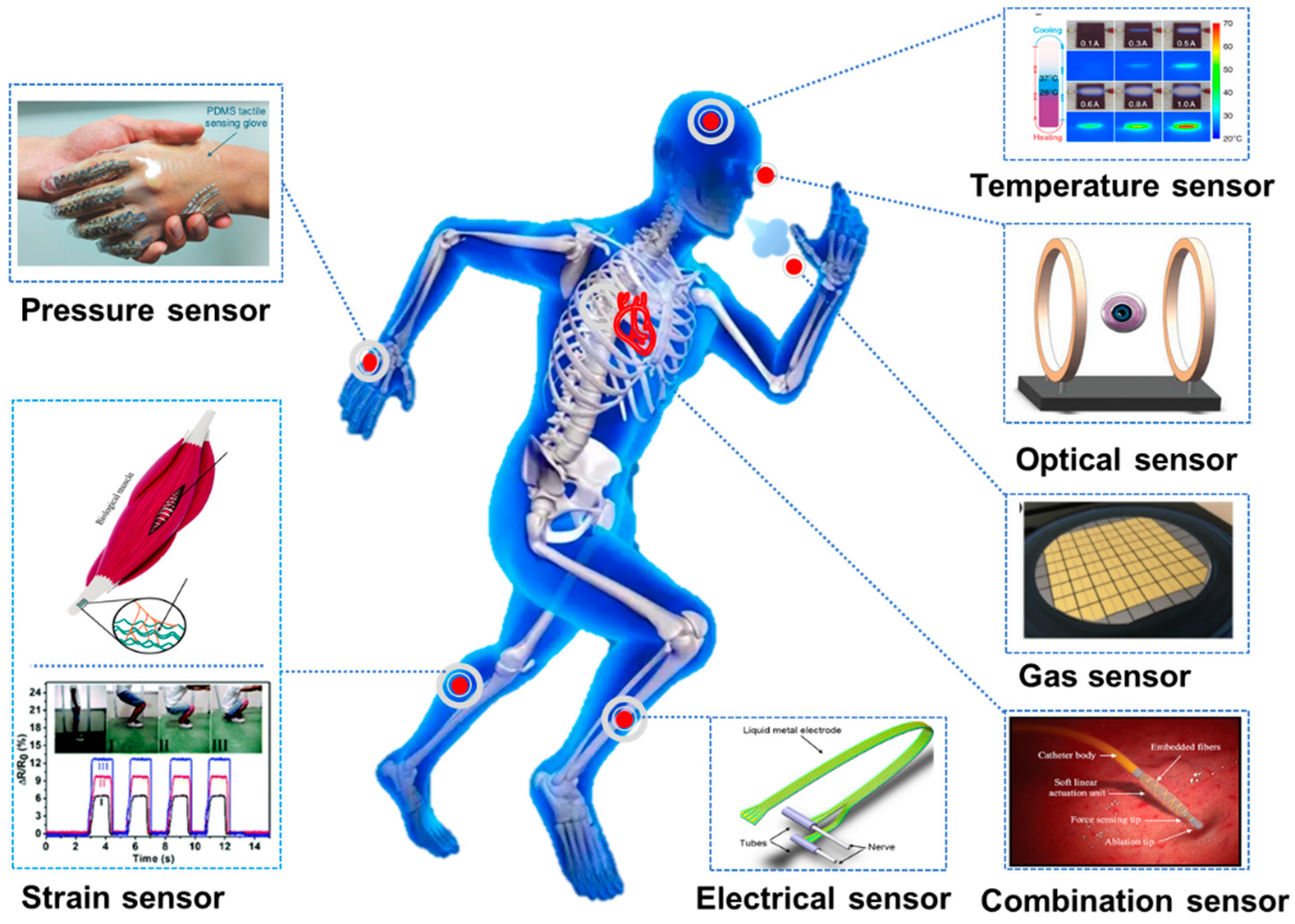
3. Applications
3.1. Mechanical Sensor
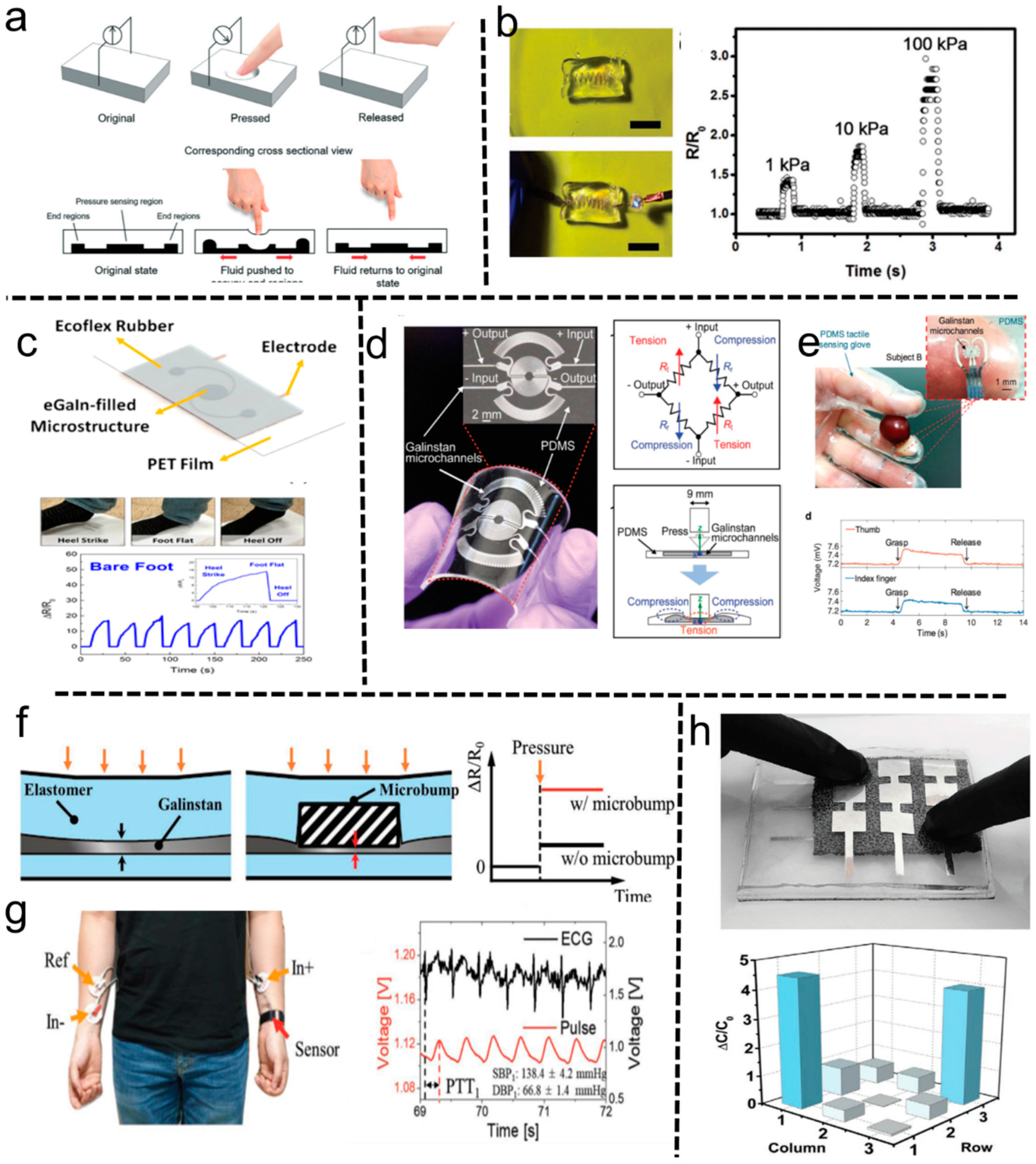
3.1.1. Pressure Sensor
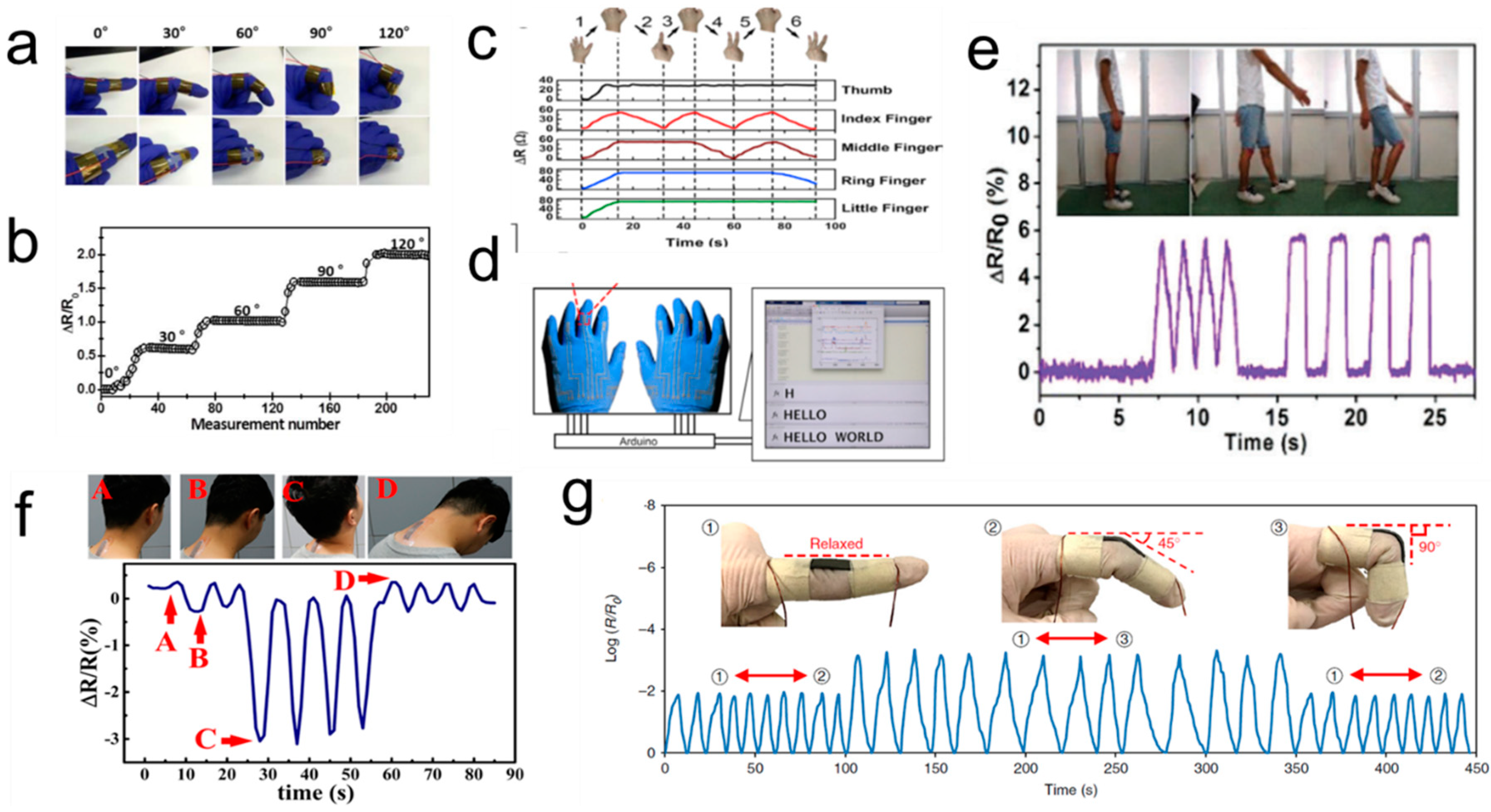
3.1.2. Strain Sensor
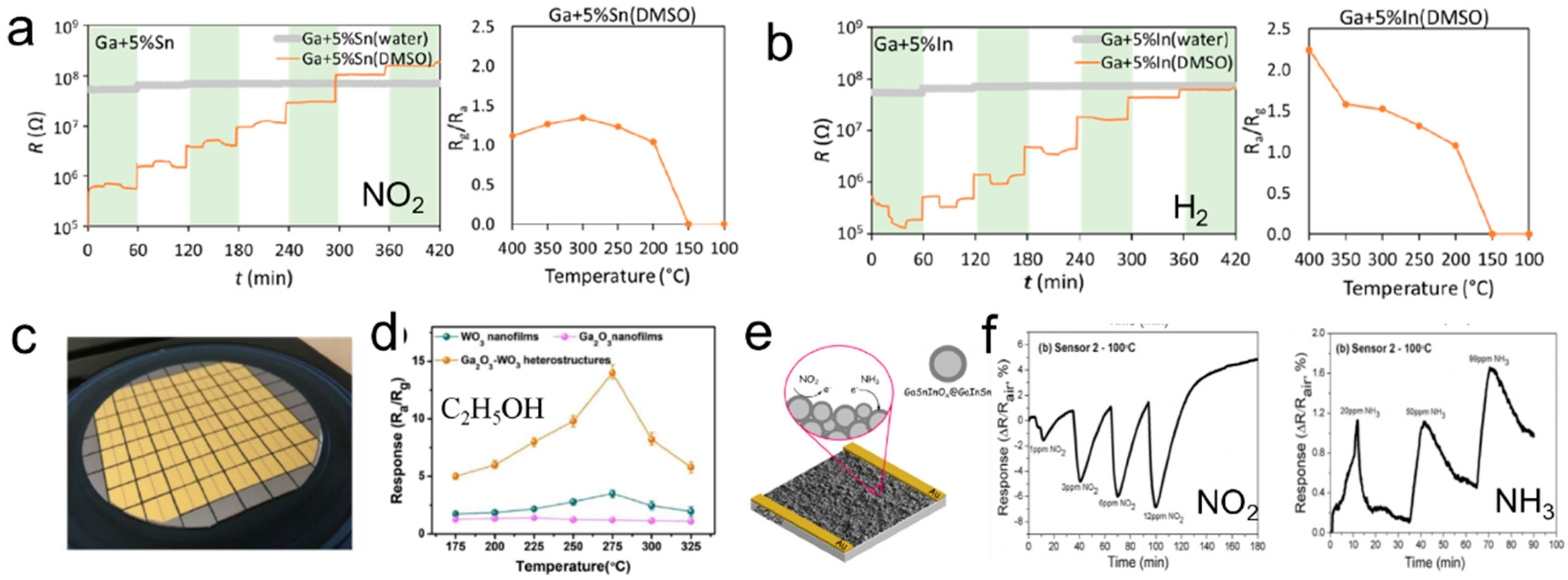
3.2. Gas Sensor
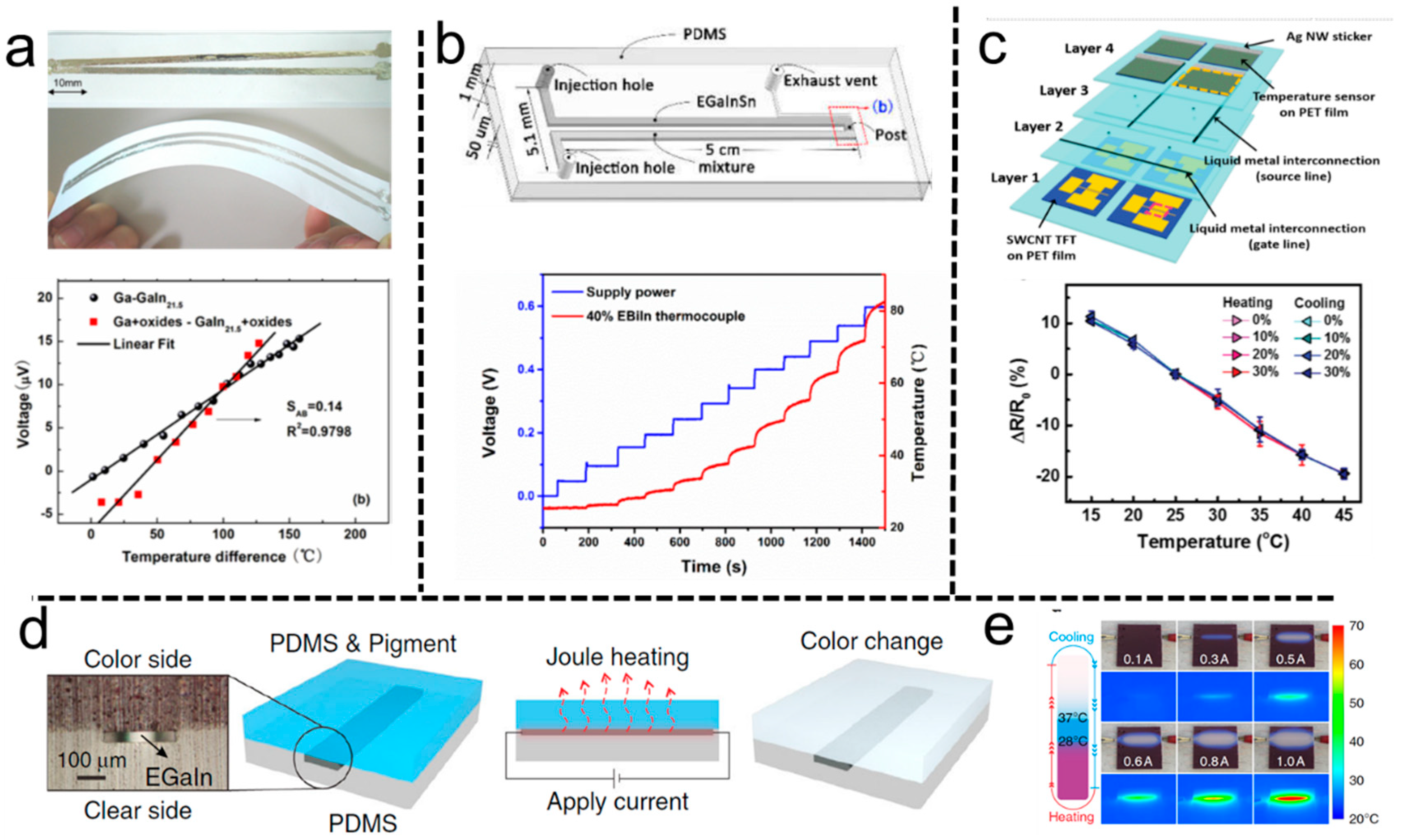
3.3. Temperature Sensor
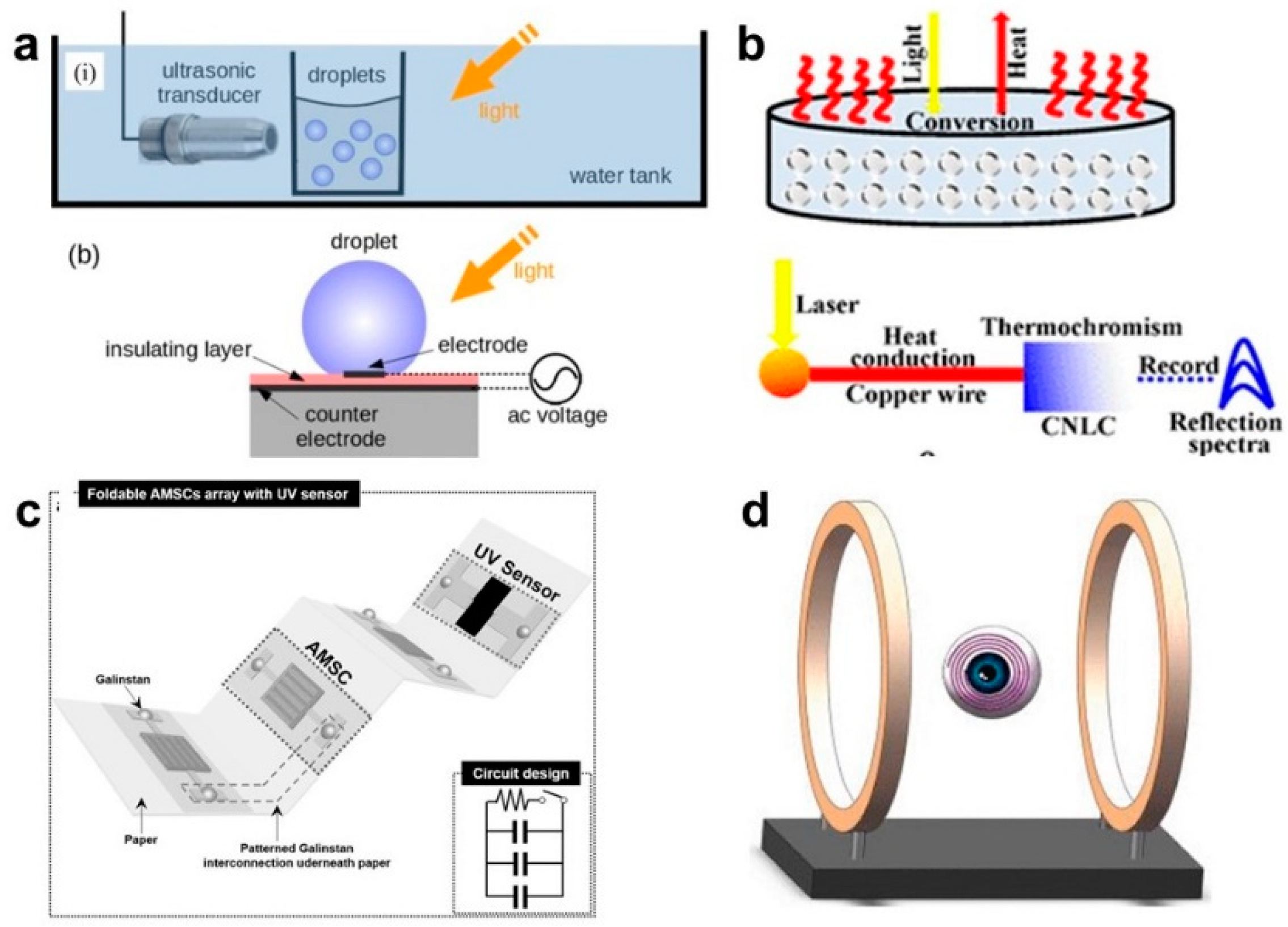
3.4. Optical Sensor
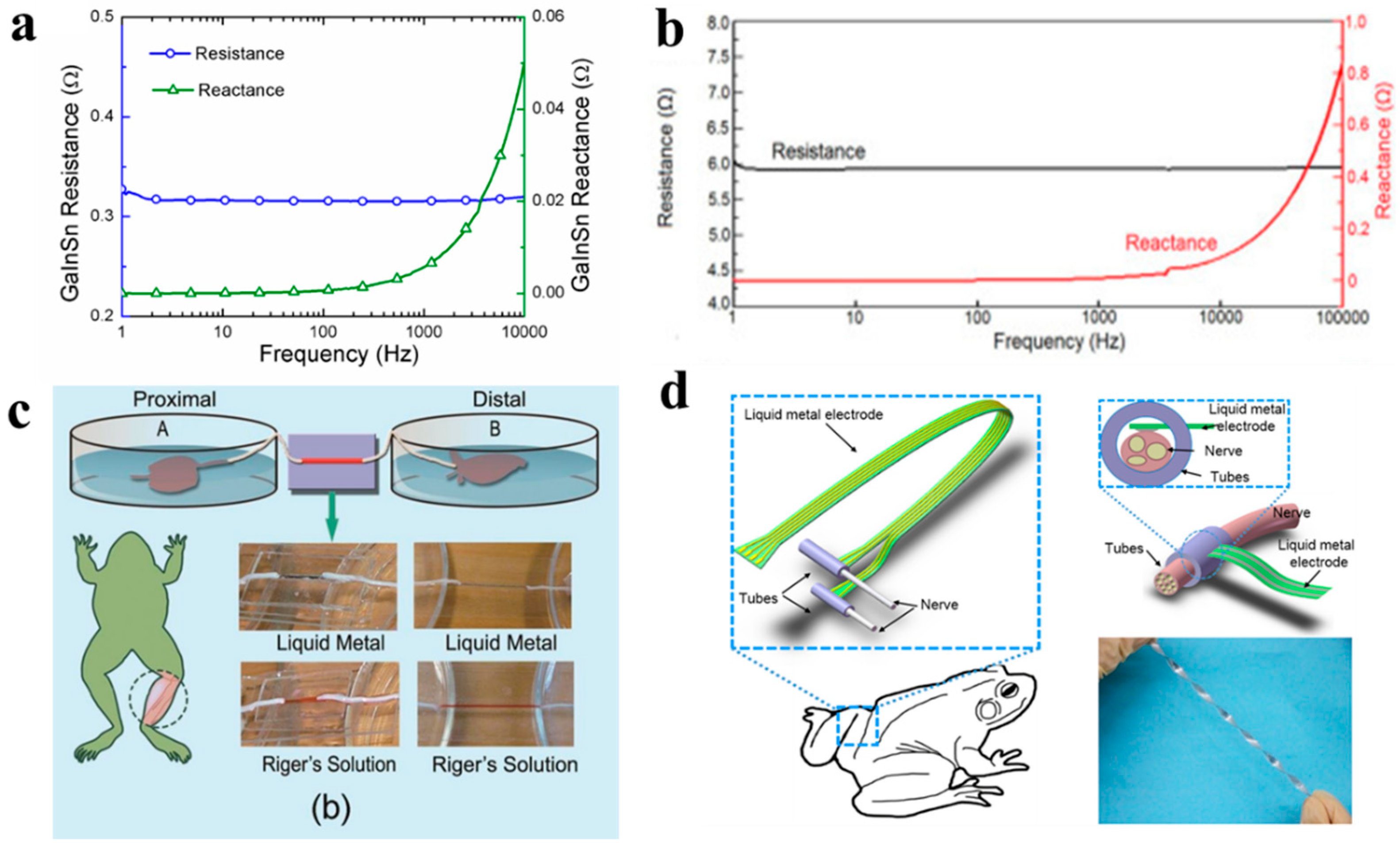
3.5. Electrical Sensor
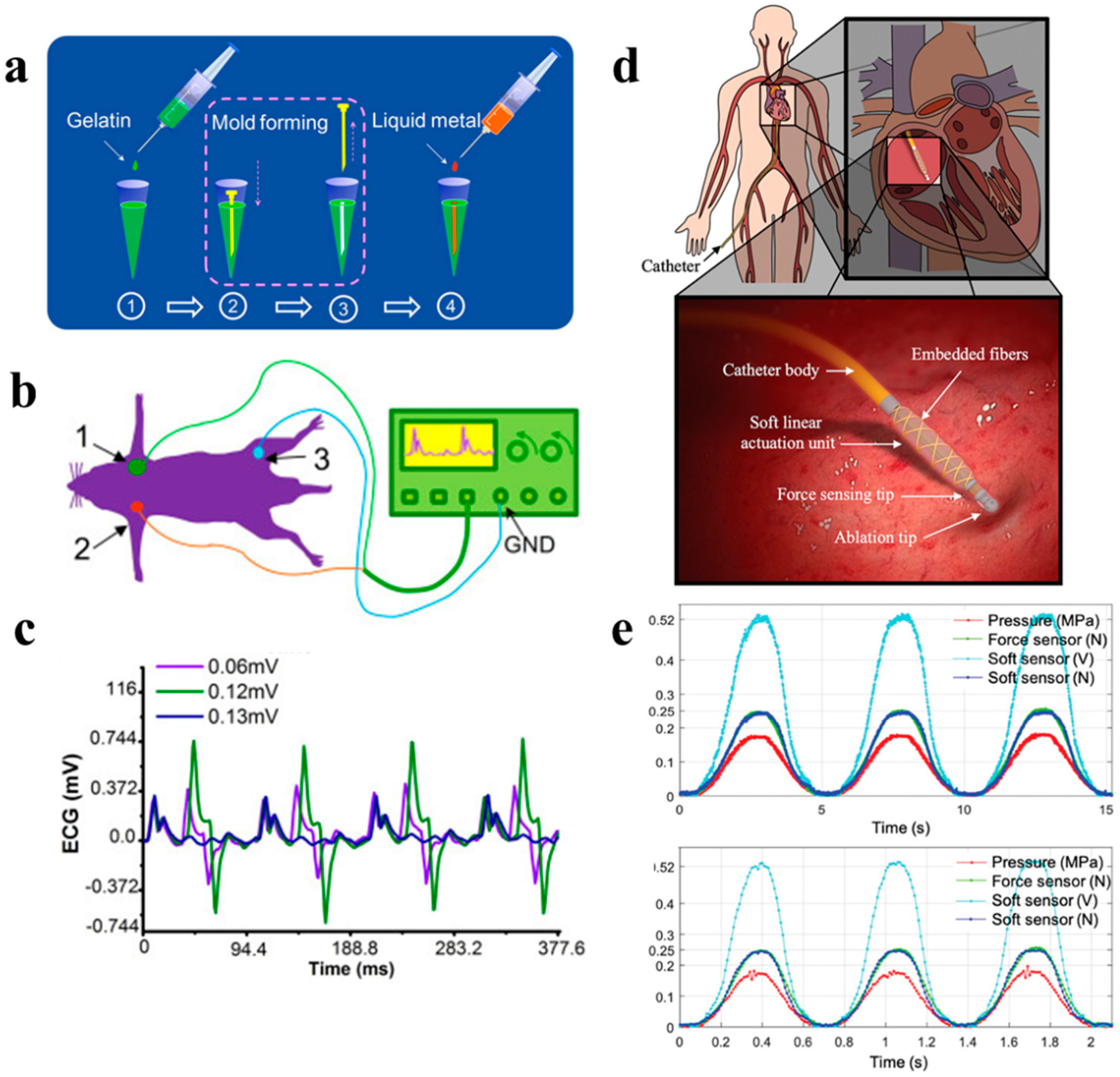
3.6. Multifunctional Sensor
4. Challenges
4.1. Materials and Fabrication
4.2. Applications
5. Perspective
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, W.; Chen, C.; Yang, D.; Dong, G.; Jia, S.; Zhao, B.; Yan, L.; Yao, Q.; Sunna, A.; Liu, Y. Optical Biosensors Based on Nitrogen-Doped Graphene Functionalized with Magnetic Nanoparticles. Adv. Mater. Interfaces 2016, 3, 1600590. [Google Scholar] [CrossRef]
- Doron, E.; Penner, A. Acoustic biosensor for monitoring physiological conditions in a body implantation site. J. Acoust. Soc. Am. 2003, 113, 2397. [Google Scholar] [CrossRef]
- Li, H.; Yang, Y.; Liu, J. Printable tiny thermocouple by liquid metal gallium and its matching metal. Appl. Phys. Lett. 2012, 101, 073511. [Google Scholar] [CrossRef]
- Mohammed, M.G.; Kramer, R. All-Printed Flexible and Stretchable Electronics. Adv. Mater. 2017, 29, 1604965. [Google Scholar] [CrossRef] [PubMed]
- Wilson, A.D. Advances in Electronic-Nose Technologies for the Detection of Volatile Biomarker Metabolites in the Human Breath. Metabolites 2015, 5, 140–163. [Google Scholar] [CrossRef] [PubMed]
- David, M.; Florescu, M.; Bala, C. Biosensors for Antioxidants Detection: Trends and Perspectives. Biosensors 2020, 10, 112. [Google Scholar] [CrossRef] [PubMed]
- Bagdziunas, G.; Palinauskas, D. Poly(9H-carbazole) as a Organic Semiconductor for Enzymatic and Non-Enzymatic Glucose Sensors. Biosensors 2020, 10, 104. [Google Scholar] [CrossRef] [PubMed]
- David Nelson, A.; Shiveshwarkar, P.; Lim, B.; Rojas, G.; Abure, I.; Shrestha, A.; Jaworski, J. Tuning the Surface Charge of Self-Assembled Polydiacetylene Vesicles to Control Aggregation and Cell Binding. Biosensors 2020, 10, 132. [Google Scholar] [CrossRef] [PubMed]
- Senf, B.; Yeo, W.-H.; Kim, J.-H. Recent Advances in Portable Biosensors for Biomarker Detection in Body Fluids. Biosensors 2020, 10, 127. [Google Scholar] [CrossRef]
- Jin, X.; Liu, C.; Xu, T.; Su, L.; Zhang, X. Artificial intelligence biosensors: Challenges and prospects. Biosens. Bioelectron. 2020, 165, 112412. [Google Scholar] [CrossRef]
- Zhang, J.; Lei, J.; Pan, R.; Leng, C.; Hu, Z.; Ju, H. In situ assembly of gold nanoparticles on nitrogen-doped carbon nanotubes for sensitive immunosensing of microcystin-LR. Chem. Commun. 2011, 47, 668–670. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhou, D.; Sheng, S.; Yang, J.; Chen, X.; Xie, G.; Xiang, H. Electrochemical immunoassay for the cancer marker LMP-1(Epstein-Barr virus-derived latent membrane protein 1) using a glassy carbon electrode modified with Pd@Pt nanoparticles and a nanocomposite consisting of graphene sheets and MWCNTs. Microchim. Acta 2016, 183, 2055–2062. [Google Scholar] [CrossRef]
- Cao, X.; Ye, Y.; Liu, S. Gold nanoparticle-based signal amplification for biosensing. Anal. Biochem. 2011, 417, 1–16. [Google Scholar] [CrossRef]
- Orlov, A.V.; Bragina, V.A.; Nikitin, M.P.; Nikitin, P.I. Rapid dry-reagent immunomagnetic biosensing platform based on volumetric detection of nanoparticles on 3D structures. Biosens. Bioelectron. 2016, 79, 423–429. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, X.; Tan, Y.; Yuan, Q. Recent progress in flexible and wearable bio-electronics based on nanomaterials. Nano Res. 2017, 10, 1560–1583. [Google Scholar] [CrossRef]
- Reglero Ruiz, J.A.; Sanjuán, A.M.; Vallejos, S.; García, F.C.; García, J.M. Smart Polymers in Micro and Nano Sensory Devices. Chemosensors 2018, 6, 12. [Google Scholar] [CrossRef] [Green Version]
- Culver, H.R.; Clegg, J.R.; Peppas, N.A. Analyte-Responsive Hydrogels: Intelligent Materials for Biosensing and Drug Delivery. Acc. Chem. Res. 2017, 50, 170–178. [Google Scholar] [CrossRef]
- Zhang, D.; Chi, B.; Li, B.; Gao, Z.; Du, Y.; Guo, J.; Wei, J. Fabrication of highly conductive graphene flexible circuits by 3D printing. Synth. Met. 2016, 217, 79–86. [Google Scholar] [CrossRef]
- Dinh, T.; Phan, H.-P.; Nguyen, T.-K.; Qamar, A.; Foisal, A.R.M.; Nguyen Viet, T.; Tran, C.-D.; Zhu, Y.; Nguyen, N.-T.; Dao, D.V. Environment-friendly carbon nanotube based flexible electronics for noninvasive and wearable healthcare. J. Mater. Chem. C 2016, 4, 10061–10068. [Google Scholar] [CrossRef]
- Dinh, T.; Nguyen, T.; Phan, H.-P.; Nguyen, N.-T.; Dao, D.V.; Bell, J. Stretchable respiration sensors: Advanced designs and multifunctional platforms for wearable physiological monitoring. Biosens. Bioelectron. 2020, 166, 112460. [Google Scholar] [CrossRef] [PubMed]
- Ren, Y.; Sun, X.; Liu, J. Advances in Liquid Metal-Enabled Flexible and Wearable Sensors. Micromachines 2020, 11, 200. [Google Scholar] [CrossRef] [Green Version]
- Idrus-Saidi, S.A.; Tang, J.; Yang, J.; Han, J.; Daeneke, T.; O’Mullane, A.P.; Kalantar-Zadeh, K. Liquid Metal-Based Route for Synthesizing and Tuning Gas-Sensing Elements. ACS Sens. 2020, 5, 1177–1189. [Google Scholar] [CrossRef]
- Kim, K.; Choi, J.; Jeong, Y.; Cho, I.; Kim, M.; Kim, S.; Oh, Y.; Park, I. Highly Sensitive and Wearable Liquid Metal-Based Pressure Sensor for Health Monitoring Applications: Integration of a 3D-Printed Microbump Array with the Microchannel. Adv. Healthc. Mater. 2019, 8, 1900978. [Google Scholar] [CrossRef] [PubMed]
- Jiao, Y.; Young, C.; Yang, S.; Oren, S.; Ceylan, H.; Kim, S.; Gopalakrishnan, K.; Taylor, P.C.; Dong, L. Wearable Graphene Sensors with Microfluidic Liquid Metal Wiring for Structural Health Monitoring and Human Body Motion Sensing. IEEE Sens. J. 2016, 16, 7870–7875. [Google Scholar] [CrossRef]
- Zhang, M.; Yao, S.; Rao, W.; Liu, J. Transformable soft liquid metal micro/nanomaterials. Mater. Sci. Eng. R Rep. 2019, 138, 1–35. [Google Scholar] [CrossRef]
- Kim, D.; Thissen, P.; Viner, G.; Lee, D.-W.; Choi, W.; Chabal, Y.J.; Lee, J.-B. Recovery of Nonwetting Characteristics by Surface Modification of Gallium-Based Liquid Metal Droplets Using Hydrochloric Acid Vapor. ACS Appl. Mater. Interfaces 2013, 5, 179–185. [Google Scholar] [CrossRef] [PubMed]
- Sheng, L.; He, Z.; Yao, Y.; Liu, J. Transient State Machine Enabled from the Colliding and Coalescence of a Swarm of Autonomously Running Liquid Metal Motors. Small 2015, 11, 5253–5261. [Google Scholar] [CrossRef]
- Wu, Y.-H.; Deng, Z.-F.; Peng, Z.-F.; Zheng, R.-M.; Liu, S.-Q.; Xing, S.-T.; Li, J.-Y.; Huang, D.-Q.; Liu, L. A Novel Strategy for Preparing Stretchable and Reliable Biphasic Liquid Metal. Adv. Funct. Mater. 2019, 29, 1903840. [Google Scholar] [CrossRef]
- Wang, Q.; Yu, Y.; Yang, J.; Liu, J. Fast Fabrication of Flexible Functional Circuits Based on Liquid Metal Dual-Trans Printing. Adv. Mater. 2015, 27, 7109–7116. [Google Scholar] [CrossRef]
- Hu, L.; Wang, L.; Ding, Y.; Zhan, S.; Liu, J. Manipulation of Liquid Metals on a Graphite Surface. Adv. Mater. 2016, 28, 9210–9217. [Google Scholar] [CrossRef]
- Chen, S.; Wang, L.; Zhang, Q.; Liu, J. Liquid metal fractals induced by synergistic oxidation. Sci. Bull. 2018, 63, 1513–1520. [Google Scholar] [CrossRef]
- Chen, S.; Yang, X.; Cui, Y.; Liu, J. Self-Growing and Serpentine Locomotion of Liquid Metal Induced by Copper Ions. ACS Appl. Mater. Interfaces 2018, 10, 22889–22895. [Google Scholar] [CrossRef]
- Tang, J.; Zhao, X.; Li, J.; Zhou, Y.; Liu, J. Liquid Metal Phagocytosis: Intermetallic Wetting Induced Particle Internalization. Adv. Sci. 2017, 4, 1700024. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, H.; Guo, R.; Sun, Z.; Wang, H.; Hou, Y.; Wang, Q.; Rao, W.; Liu, J. Direct Writing and Repairable Paper Flexible Electronics Using Nickel–Liquid Metal Ink. Adv. Mater. Interfaces 2018, 5, 1800571. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, P.; Wang, Q.; Li, L.; Dong, S.; Liu, J.; Rao, W. Stretchable liquid metal electromagnetic interference shielding coating materials with superior effectiveness. J. Mater. Chem. C 2019, 7, 10331–10337. [Google Scholar] [CrossRef]
- Cao, L.; Yu, D.; Xia, Z.; Wan, H.; Liu, C.; Yin, T.; He, Z. Ferromagnetic Liquid Metal Putty-Like Material with Transformed Shape and Reconfigurable Polarity. Adv. Mater. 2020, 32, 2000827. [Google Scholar] [CrossRef]
- Yuan, B.; Zhao, C.; Sun, X.; Liu, J. Lightweight Liquid Metal Entity. Adv. Funct. Mater. 2020, 30, 1910709. [Google Scholar] [CrossRef]
- Shu, J.; Lu, Y.; Wang, E.; Li, X.; Tang, S.-Y.; Zhao, S.; Zhou, X.; Sun, L.; Li, W.; Zhang, S. Particle-Based Porous Materials for the Rapid and Spontaneous Diffusion of Liquid Metals. ACS Appl. Mater. Interfaces 2020, 12, 11163–11170. [Google Scholar] [CrossRef]
- Guo, R.; Wang, H.; Sun, X.; Yao, S.; Chang, H.; Wang, H.; Liu, J.; Zhang, Y. Semiliquid Metal Enabled Highly Conductive Wearable Electronics for Smart Fabrics. ACS Appl. Mater. Interfaces 2019, 11, 30019–30027. [Google Scholar] [CrossRef]
- Ren, L.; Zhuang, J.; Casillas, G.; Feng, H.; Liu, Y.; Xu, X.; Liu, Y.; Chen, J.; Du, Y.; Jiang, L.; et al. Nanodroplets for Stretchable Superconducting Circuits. Adv. Funct. Mater. 2016, 26, 8111–8118. [Google Scholar] [CrossRef]
- Lin, J.; Li, Q.; Liu, T.-Y.; Cui, Y.; Zheng, H.; Liu, J. Printing of Quasi-2D Semiconducting β-Ga2O3 in Constructing Electronic Devices via Room-Temperature Liquid Metal Oxide Skin. Phys. Status Solidi (RRL) Rapid Res. Lett. 2019, 13, 1900271. [Google Scholar] [CrossRef]
- Liu, Z.; Yamazaki, T.; Shen, Y.; Kikuta, T.; Nakatani, N.; Li, Y. O2 and CO sensing of Ga2O3 multiple nanowire gas sensors. Sens. Actuators B Chem. 2008, 129, 666–670. [Google Scholar] [CrossRef]
- Chang, H.; Zhang, P.; Guo, R.; Cui, Y.; Hou, Y.; Sun, Z.; Rao, W. Recoverable Liquid Metal Paste with Reversible Rheological Characteristic for Electronics Printing. ACS Appl. Mater. Interfaces 2020, 12, 14125–14135. [Google Scholar] [CrossRef]
- Guo, R.; Wang, X.; Chang, H.; Yu, W.; Liang, S.; Rao, W.; Liu, J. Ni-GaIn Amalgams Enabled Rapid and Customizable Fabrication of Wearable and Wireless Healthcare Electronics. Adv. Eng. Mater. 2018, 20, 1800054. [Google Scholar] [CrossRef]
- Kong, W.; Wang, Z.; Wang, M.; Manning, K.C.; Uppal, A.; Green, M.D.; Wang, R.Y.; Rykaczewski, K. Oxide-Mediated Formation of Chemically Stable Tungsten–Liquid Metal Mixtures for Enhanced Thermal Interfaces. Adv. Mater. 2019, 31, 1904309. [Google Scholar] [CrossRef] [PubMed]
- Fu, J.-H.; Gao, J.-Y.; Chen, S.; Qin, P.; Shi, J.-T.; Liu, J. Self-encapsulation liquid metal materials for flexible and stretchable electrical conductors. RSC Adv. 2019, 9, 35102–35108. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Zhao, X.; Li, J.; Guo, R.; Zhou, Y.; Liu, J. Gallium-Based Liquid Metal Amalgams: Transitional-State Metallic Mixtures(TransM2ixes) with Enhanced and Tunable Electrical, Thermal, and Mechanical Properties. ACS Appl. Mater. Interfaces 2017, 9, 35977–35987. [Google Scholar] [CrossRef] [PubMed]
- Daeneke, T.; Khoshmanesh, K.; Mahmood, N.; de Castro, I.A.; Esrafilzadeh, D.; Barrow, S.J.; Dickey, M.D.; Kalantar-zadeh, K. Liquid metals: Fundamentals and applications in chemistry. Chem. Soc. Rev. 2018, 47, 4073–4111. [Google Scholar] [CrossRef]
- Blaiszik, B.J.; Kramer, S.L.B.; Grady, M.E.; McIlroy, D.A.; Moore, J.S.; Sottos, N.R.; White, S.R. Autonomic Restoration of Electrical Conductivity. Adv. Mater. 2012, 24, 398–401. [Google Scholar] [CrossRef]
- Liao, M.; Liao, H.; Ye, J.; Wan, P.; Zhang, L. Polyvinyl Alcohol-Stabilized Liquid Metal Hydrogel for Wearable Transient Epidermal Sensors. ACS Appl. Mater. Interfaces 2019, 11, 47358–47364. [Google Scholar] [CrossRef]
- Markvicka, E.J.; Bartlett, M.D.; Huang, X.; Majidi, C. An autonomously electrically self-healing liquid metal–elastomer composite for robust soft-matter robotics and electronics. Nat. Mater. 2018, 17, 618–624. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Wang, Q.; Guo, R.; Zhang, M.; Wang, S.; Lu, C.; Xue, M.; Fan, J.; He, Z.; Rao, W. Self-assembled ultrathin film of CNC/PVA–liquid metal composite as a multifunctional Janus material. Mater. Horiz. 2019, 6, 1643–1653. [Google Scholar] [CrossRef]
- Zhu, S.; So, J.-H.; Mays, R.; Desai, S.; Barnes, W.R.; Pourdeyhimi, B.; Dickey, M.D. Ultrastretchable Fibers with Metallic Conductivity Using a Liquid Metal Alloy Core. Adv. Funct. Mater. 2013, 23, 2308–2314. [Google Scholar] [CrossRef]
- Yu, D.; Liao, Y.; Song, Y.; Wang, S.; Wan, H.; Zeng, Y.; Yin, T.; Yang, W.; He, Z. A Super-Stretchable Liquid Metal Foamed Elastomer for Tunable Control of Electromagnetic Waves and Thermal Transport. Adv. Sci. 2020, 7, 2000177. [Google Scholar] [CrossRef]
- Yao, B.; Hong, W.; Chen, T.; Han, Z.; Xu, X.; Hu, R.; Hao, J.; Li, C.; Li, H.; Perini, S.E.; et al. Highly Stretchable Polymer Composite with Strain-Enhanced Electromagnetic Interference Shielding Effectiveness. Adv. Mater. 2020, 32, 1907499. [Google Scholar] [CrossRef]
- Yun, G.; Tang, S.-Y.; Sun, S.; Yuan, D.; Zhao, Q.; Deng, L.; Yan, S.; Du, H.; Dickey, M.D.; Li, W. Liquid metal-filled magnetorheological elastomer with positive piezoconductivity. Nat. Commun. 2019, 10, 1300. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yun, G.; Tang, S.-Y.; Zhao, Q.; Zhang, Y.; Lu, H.; Yuan, D.; Sun, S.; Deng, L.; Dickey, M.D.; Li, W. Liquid Metal Composites with Anisotropic and Unconventional Piezoconductivity. Matter 2020, 3, 824–841. [Google Scholar] [CrossRef]
- Liu, T.-Y.; Qin, P.; Liu, J. Intelligent Liquid Integrated Functional Entity: A Basic Way to Innovate Future Advanced Biomimetic Soft Robotics. Adv. Intell. Syst. 2019, 1, 1900017. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Yao, Y.; He, Z.; Rao, W.; Hu, L.; Chen, S.; Lin, J.; Gao, J.; Zhang, P.; Sun, X.; et al. A Highly Stretchable Liquid Metal Polymer as Reversible Transitional Insulator and Conductor. Adv. Mater. 2019, 31, 1901337. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, P.; Zhang, C.; Wang, Y.; Chang, H.; Rao, W. Porous and anisotropic liquid metal composites with tunable reflection ratio for low-temperature electromagnetic interference shielding. Appl. Mater. Today 2020, 19, 100612. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.-Z.; Sun, X.-Y.; Wang, Q.; Wang, X.-J.; Chen, L.-B.; Zhang, L.-J.; Guo, R.; Liu, J. Generalized way to make temperature tunable conductor–insulator transition liquid metal composites in a diverse range. Mater. Horiz. 2019, 6, 1854–1861. [Google Scholar] [CrossRef]
- Wu, Y.-H.; Zhen, R.-M.; Liu, H.-Z.; Liu, S.-Q.; Deng, Z.-F.; Wang, P.-P.; Chen, S.; Liu, L. Liquid metal fiber composed of a tubular channel as a high-performance strain sensor. J. Mater. Chem. C 2017, 5, 12483–12491. [Google Scholar] [CrossRef]
- Liu, S.; Sun, X.; Hildreth, O.J.; Rykaczewski, K. Design and characterization of a single channel two-liquid capacitor and its application to hyperelastic strain sensing. Lab Chip 2015, 15, 1376–1384. [Google Scholar] [CrossRef]
- Cooper, C.B.; Arutselvan, K.; Liu, Y.; Armstrong, D.; Lin, Y.; Khan, M.R.; Genzer, J.; Dickey, M.D. Stretchable Capacitive Sensors of Torsion, Strain, and Touch Using Double Helix Liquid Metal Fibers. Adv. Funct. Mater. 2017, 27, 1605630. [Google Scholar] [CrossRef]
- Jin, Y.; Lin, Y.; Kiani, A.; Joshipura, I.D.; Ge, M.; Dickey, M.D. Materials tactile logic via innervated soft thermochromic elastomers. Nat. Commun. 2019, 10, 4187. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Yu, Y.; Yi, L.; Liu, J. Liquid metal as reconnection agent for peripheral nerve injury. Sci. Bull. 2016, 61, 939–947. [Google Scholar] [CrossRef] [Green Version]
- Yi, L.; Jin, C.; Wang, L.; Liu, J. Liquid-solid phase transition alloy as reversible and rapid molding bone cement. Biomaterials 2014, 35, 9789–9801. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Hu, Q.; Lin, Y.; Pacardo, D.B.; Wang, C.; Sun, W.; Ligler, F.S.; Dickey, M.D.; Gu, Z. Transformable liquid-metal nanomedicine. Nat. Commun. 2015, 6, 10066. [Google Scholar] [CrossRef] [PubMed]
- Trung, T.Q.; Lee, N.-E. Flexible and Stretchable Physical Sensor Integrated Platforms for Wearable Human-Activity Monitoringand Personal Healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef]
- Dinh, T.; Nguyen, T.; Phan, H.-P.; Nguyen, T.-K.; Dau, V.T.; Nguyen, N.-T.; Dao, D.V. Advances in Rational Design and Materials of High-Performance Stretchable Electromechanical Sensors. Small 2020, 16, 1905707. [Google Scholar] [CrossRef] [PubMed]
- Yeo, J.C.; Yu, J.; Koh, Z.M.; Wang, Z.; Lim, C.T. Wearable tactile sensor based on flexible microfluidics. Lab Chip 2016, 16, 3244–3250. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Li, M.; Ouyang, C.; Lu, T.J.; Li, F.; Xu, F. Biofriendly, Stretchable, and Reusable Hydrogel Electronics as Wearable Force Sensors. Small 2018, 14, 1801711. [Google Scholar] [CrossRef]
- Yeo, J.C.; Kenry; Yu, J.; Loh, K.P.; Wang, Z.; Lim, C.T. Triple-State Liquid-Based Microfluidic Tactile Sensor with High Flexibility, Durability, and Sensitivity. ACS Sens. 2016, 1, 543–551. [Google Scholar] [CrossRef]
- Gao, Y.; Ota, H.; Schaler, E.W.; Chen, K.; Zhao, A.; Gao, W.; Fahad, H.M.; Leng, Y.; Zheng, A.; Xiong, F.; et al. Wearable Microfluidic Diaphragm Pressure Sensor for Health and Tactile Touch Monitoring. Adv. Mater. 2017, 29, 1701985. [Google Scholar] [CrossRef]
- Yang, J.; Tang, D.; Ao, J.; Ghosh, T.; Neumann, T.V.; Zhang, D.; Piskarev, E.; Yu, T.; Truong, V.K.; Xie, K.; et al. Ultrasoft Liquid Metal Elastomer Foams with Positive and Negative Piezopermittivity for Tactile Sensing. Adv. Funct. Mater. 2020, 30, 2002611. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, R.; Li, L.; Zhang, L.; Liu, B.; Deng, Z.; Wang, L.; Gui, L. A liquid metal based capacitive soft pressure microsensor. Lab Chip 2019, 19, 807–814. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, M.; Wang, R.; Deng, Z.; Gui, L. Stretchable Pressure Sensor with Leakage-Free Liquid-Metal Electrodes. Sensors 2019, 19, 1316. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.; Chen, B.; Wood, R.J. Design and Fabrication of Soft Artificial Skin Using Embedded Microchannels and Liquid Conductors. IEEE Sens. J. 2012, 12, 2711–2718. [Google Scholar] [CrossRef]
- Yoon, Y.; Kim, S.; Kim, D.; Kauh, S.K.; Lee, J. Four Degrees-of-Freedom Direct Writing of Liquid Metal Patterns on Uneven Surfaces. Adv. Mater. Technol. 2019, 4, 1800379. [Google Scholar] [CrossRef]
- Guo, R.; Wang, X.; Yu, W.; Tang, J.; Liu, J. A highly conductive and stretchable wearable liquid metal electronic skin for long-term conformable health monitoring. Sci. China Technol. Sci. 2018, 61, 1031–1037. [Google Scholar] [CrossRef]
- Ohalloran, A.; Omalley, F.; Mchugh, P.E. A review on dielectric elastomer actuators, technology, applications, and challenges. J. Appl. Phys. 2008, 104, 071101. [Google Scholar] [CrossRef]
- Bae, S.; Kim, H.; Lee, Y.; Xu, X.; Park, J.; Zheng, Y.; Balakrishnan, J.; Lei, T.; Kim, H.R.; Song, Y.I. Roll-to-roll production of 30-inch graphene films for transparent electrodes. Nat. Nanotechnol. 2010, 5, 574–578. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuan, W.; Hu, L.; Yu, Z.; Lam, T.; Biggs, J.; Ha, S.M.; Xi, D.; Chen, B.; Senesky, M.K.; Gruner, G. Fault-Tolerant Dielectric Elastomer Actuators using Single-Walled Carbon Nanotube Electrodes. Adv. Mater. 2008, 20, 621–625. [Google Scholar] [CrossRef]
- Hyun, D.C.; Park, M.; Park, C.; Kim, B.; Xia, Y.; Hur, J.; Kim, J.M.; Park, J.; Jeong, U. Ordered Zigzag Stripes of Polymer Gel/Metal Nanoparticle Composites for Highly Stretchable Conductive Electrodes. Adv. Mater. 2011, 23, 2946–2950. [Google Scholar] [CrossRef]
- Arora, S.; Ghosh, T.K.; Muth, J.F. Dielectric elastomer based prototype fiber actuators. Sens. Actuators A Phys. 2007, 136, 321–328. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, M.; Mei, S.; Han, Y.; Liu, J. Ultra-compliant liquid metal electrodes with in-plane self-healing capability for dielectric elastomer actuators. Appl. Phys. Lett. 2013, 103, 064101. [Google Scholar] [CrossRef]
- Park, Y.; Tepayotlramirez, D.; Wood, R.J.; Majidi, C. Influence of cross-sectional geometry on the sensitivity and hysteresis of liquid-phase electronic pressure sensors. Appl. Phys. Lett. 2012, 101, 191904. [Google Scholar] [CrossRef] [Green Version]
- King, J.P.; Valle, L.E.; Pol, N.; Park, Y. In Design, modeling, and control of pneumatic artificial muscles with integrated soft sensing. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4985–4990. [Google Scholar]
- Park, Y.; Wood, R.J. Smart pneumatic artificial muscle actuator with embedded microfluidic sensing. In Proceedings of the 2013 IEEE SENSORS, Baltimore, MD, USA, 3–6 November 2013. [Google Scholar]
- Wirekoh, J.; Valle, L.; Pol, N.; Park, Y.-L. Sensorized, Flat, Pneumatic Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback. Soft Robot. 2019, 6, 768–777. [Google Scholar] [CrossRef] [Green Version]
- Overvelde, J.T.B.; Mengüç, Y.; Polygerinos, P.; Wang, Y.; Wang, Z.; Walsh, C.J.; Wood, R.J.; Bertoldi, K. Mechanical and electrical numerical analysis of soft liquid-embedded deformation sensors analysis. Extrem. Mech. Lett. 2014, 1, 42–46. [Google Scholar] [CrossRef]
- Vogt, D.M.; Park, Y.; Wood, R.J. Design and Characterization of a Soft Multi-Axis Force Sensor Using Embedded Microfluidic Channels. IEEE Sens. J. 2013, 13, 4056–4064. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Lee, J.; Choi, B. Stretching and Twisting Sensing with Liquid-Metal Strain Gauges Printed on Silicone Elastomers. IEEE Sens. J. 2015, 15, 6077–6078. [Google Scholar] [CrossRef]
- Gao, Q.; Li, H.; Zhang, J.; Xie, Z.; Zhang, J.; Wang, L. Microchannel Structural Design for a Room-Temperature Liquid Metal Based Super-stretchable Sensor. Sci. Rep. 2019, 9, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Wu, Y.; Asghar, W.; Ding, J.; Su, X.; Li, S.; Li, F.; Yu, Z.; Shang, J.; Liu, Y.; et al. Asymmetric Structure Based Flexible Strain Sensor for Simultaneous Detection of Various Human Joint Motions. ACS Appl. Electron. Mater. 2019, 1, 1866–1872. [Google Scholar] [CrossRef]
- Tang, L.; Cheng, S.; Zhang, L.; Mi, H.; Mou, L.; Yang, S.; Huang, Z.; Shi, X.; Jiang, X. Printable Metal-Polymer Conductors for Highly Stretchable Bio-Devices. iScience 2018, 4, 302–311. [Google Scholar] [CrossRef]
- Lou, Y.; Liu, H.; Zhang, J. Liquid metals in plastics for super-toughness and high-performance force sensors. Chem. Eng. J. 2020, 399, 125732. [Google Scholar] [CrossRef]
- Xu, J.; Wang, Z.; You, J.; Li, X.; Li, M.; Wu, X.; Li, C. Polymerization of moldable self-healing hydrogel with liquid metal nanodroplets for flexible strain-sensing devices. Chem. Eng. J. 2020, 392, 123788. [Google Scholar] [CrossRef]
- Fleischer, M.; Giber, J.; Meixner, H. H2-induced changes in electrical conductance of β-Ga2O3 thin-film systems. Appl. Phys. A 1992, 54, 560–566. [Google Scholar] [CrossRef]
- Schwebel, T.; Fleischer, M.; Meixner, H.; Kohl, C.D. CO-Sensor for domestic use based on high temperature stable Ga2O3 thin films. Sens. Actuators B Chem. 1998, 49, 46–51. [Google Scholar] [CrossRef]
- Wei, Z.; Akbari, M.K.; Hai, Z.; Ramachandran, R.K.; Detavernier, C.; Verpoort, F.; Kats, E.; Xu, H.; Hu, J.; Zhuiykov, S. Ultra-thin sub-10 nm Ga2O3-WO3 heterostructures developed by atomic layer deposition for sensitive and selective C2H5OH detection on ppm level. Sens. Actuators B Chem. 2019, 287, 147–156. [Google Scholar] [CrossRef]
- Shafiei, M.; Hoshyargar, F.; Motta, N.; O’Mullane, A.P. Utilizing p-type native oxide on liquid metal microdroplets for low temperature gas sensing. Mater. Des. 2017, 122, 288–295. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Gao, M.; Zhang, L.; Deng, Z.; Gui, L. A Handy Flexible Micro-Thermocouple Using Low-Melting-Point Metal Alloys. Sensors 2019, 19, 314. [Google Scholar] [CrossRef] [Green Version]
- Yan, C.; Wang, J.; Lee, P.S. Stretchable Graphene Thermistor with Tunable Thermal Index. ACS Nano 2015, 9, 2130–2137. [Google Scholar] [CrossRef]
- Yamamoto, Y.; Harada, S.; Yamamoto, D.; Honda, W.; Arie, T.; Akita, S.; Takei, K. Printed multifunctional flexible device with an integrated motion sensor for health care monitoring. Sci. Adv. 2016, 2, e1601473. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.Y.; Lee, Y.H.; Park, H.; Jin, S.W.; Jeong, Y.R.; Yun, J.; You, I.; Zi, G.; Ha, J.S. Stretchable Active Matrix Temperature Sensor Array of Polyaniline Nanofibers for Electronic Skin. Adv. Mater. 2016, 28, 930–935. [Google Scholar] [CrossRef]
- Wu, P.C.; Kim, T.; Brown, A.S.; Losurdo, M.; Bruno, G.; Everitt, H.O. Real-time plasmon resonance tuning of liquid Ga nanoparticles by in situ spectroscopic ellipsometry. Appl. Phys. Lett. 2007, 90, 103119. [Google Scholar] [CrossRef]
- Mcmahon, J.M.; Schatz, G.C.; Gray, S.K. Plasmonics in the ultraviolet with the poor metals Al, Ga, In, Sn, Tl, Pb, and Bi. Phys. Chem. Chem. Phys. 2013, 15, 5415–5423. [Google Scholar] [CrossRef]
- Reineck, P.; Lin, Y.; Gibson, B.C.; Dickey, M.D.; Greentree, A.D.; Maksymov, I.S. UV plasmonic properties of colloidal liquid-metal eutectic gallium-indium alloy nanoparticles. Sci. Rep. 2019, 9, 5345. [Google Scholar] [CrossRef] [Green Version]
- Maksymov, I.S.; Greentree, A.D. Dynamically reconfigurable plasmon resonances enabled by capillary oscillations of liquid-metal nanodroplets. Phys. Rev. A 2017, 96, 043829. [Google Scholar] [CrossRef] [Green Version]
- Lear, T.R.; Hyun, S.; Boley, J.W.; White, E.L.; Thompson, D.H.; Kramer, R.K. Liquid metal particle popping: Macroscale to nanoscale. Extrem. Mech. Lett. 2017, 13, 126–134. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Chen, Y.; Yun, F.F.; Cortie, D.L.; Jiang, L.; Wang, X. Discovery of a Voltage-Stimulated Heartbeat Effect in Droplets of Liquid Gallium. Phys. Rev. Lett. 2018, 121, 024302. [Google Scholar] [CrossRef] [Green Version]
- Lin, P.; Wei, Z.; Yan, Q.; Xie, J.; Fan, Y.; Wu, M.; Chen, Y.; Cheng, Z. Capillary-Based Microfluidic Fabrication of Liquid Metal Microspheres toward Functional Microelectrodes and Photothermal Medium. ACS Appl. Mater. Interfaces 2019, 11, 25295–25305. [Google Scholar] [CrossRef]
- Yun, J.; Lim, Y.; Lee, H.; Lee, G.; Park, H.; Hong, S.Y.; Jin, S.W.; Lee, Y.H.; Lee, S.-S.; Ha, J.S. A Patterned Graphene/ZnO UV Sensor Driven by Integrated Asymmetric Micro-Supercapacitors on a Liquid Metal Patterned Foldable Paper. Adv. Funct. Mater. 2017, 27, 1700135. [Google Scholar] [CrossRef]
- Qusba, A.; Ramrakhyani, A.K.; So, J.; Hayes, G.J.; Dickey, M.D.; Lazzi, G. On the Design of Microfluidic Implant Coil for Flexible Telemetry System. IEEE Sens. J. 2014, 14, 1074–1080. [Google Scholar] [CrossRef]
- Zhao, Z.; Lin, J.; Zhang, J.; Yu, Y.; Yuan, B.; Fan, C.; Wang, L.; Liu, J. Liquid Metal Enabled Flexible Electronic System for Eye Movement Tracking. IEEE Sens. J. 2018, 18, 2592–2598. [Google Scholar] [CrossRef]
- Zhang, J.; Sheng, L.; Jin, C.; Liu, J. Liquid Metal as Connecting or Functional Recovery Channel for the Transected Sciatic Nerve. arXiv 2014, arXiv:1404.5931. [Google Scholar]
- Liu, J.; Yi, L. Liquid Metal Biomaterials; Springer: Singapore, 2018; Volume 10, pp. 417–428. [Google Scholar]
- Wang, Y.; Zhu, C.; Pfattner, R.; Yan, H.; Jin, L.; Chen, S.; Molinalopez, F.; Lissel, F.; Liu, J.; Rabiah, N.I. A highly stretchable, transparent, and conductive polymer. Sci. Adv. 2017, 3, e1602076. [Google Scholar] [CrossRef] [Green Version]
- Guo, R.; Liu, J. Implantable liquid metal-based flexible neural microelectrode array and its application in recovering animal locomotion functions. J. Micromech. Microeng. 2017, 27, 104002. [Google Scholar] [CrossRef]
- Jin, C.; Zhang, J.; Li, X.; Yang, X.; Li, J.; Liu, J. Injectable 3-D Fabrication of Medical Electronics at the Target Biological Tissues. Sci. Rep. 2013, 3, 3442. [Google Scholar] [CrossRef] [Green Version]
- Kumar, N.; Wirekoh, J.; Saba, S.; Riviere, C.N.; Park, Y.-L. Soft Miniaturized Actuation and Sensing Units for Dynamic Force Control of Cardiac Ablation Catheters. Soft Robot. 2020. ahead of print. [Google Scholar] [CrossRef]
- Niiyama, R.; Sun, X.; Sung, C.; An, B.; Rus, D.; Kim, S. Pouch Motors: Printable Soft Actuators Integrated with Computational Design. Soft Robot. 2015, 2, 59–70. [Google Scholar] [CrossRef]
- Zhu, P.; Gao, S.; Lin, H.; Lu, X.; Yang, B.; Zhang, L.; Chen, Y.; Shi, J. Inorganic Nanoshell-Stabilized Liquid Metal for Targeted Photonanomedicine in NIR-II Biowindow. Nano Lett. 2019, 19, 2128–2137. [Google Scholar] [CrossRef]
- Ren, Y.; Wang, X.; Liu, J. Fabrication of High-Resolution Flexible Circuits and Sensors Based on Liquid Metal Inks by Spraying and Wiping Processing. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 1545–1551. [Google Scholar] [CrossRef]
- Wang, Q.; Yu, Y.; Pan, K.; Liu, J. Liquid Metal Angiography for Mega Contrast X-Ray Visualization of Vascular Network in Reconstructing In-Vitro Organ Anatomy. IEEE Trans. Biomed. Eng. 2014, 61, 2161–2166. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, X.; Yuan, B.; Rao, W.; Liu, J. Amorphous liquid metal electrodes enabled conformable electrochemical therapy of tumors. Biomaterials 2017, 146, 156–167. [Google Scholar] [CrossRef]
- Lin, Y.; Genzer, J.; Dickey, M.D. Attributes, Fabrication, and Applications of Gallium-Based Liquid Metal Particles. Adv. Sci. (Weinh) 2020, 7, 2000192. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, S.; Chang, H.; Rao, W. Galvanic Replacement of Liquid Metal/Reduced Graphene Oxide Frameworks. Adv. Mater. Interfaces 2020, 7, 2000626. [Google Scholar] [CrossRef]
- Tutika, R.; Kmiec, S.; Haque, A.B.M.T.; Martin, S.W.; Bartlett, M.D. Liquid Metal–Elastomer Soft Composites with Independently Controllable and Highly Tunable Droplet Size and Volume Loading. ACS Appl. Mater. Interfaces 2019, 11, 17873–17883. [Google Scholar] [CrossRef] [Green Version]
- Ren, Y.; Liu, J. Liquid-Metal Enabled Droplet Circuits. Micromachines 2018, 9, 218. [Google Scholar] [CrossRef] [Green Version]
- Varga, M.; Ladd, C.; Ma, S.; Holbery, J.; Troster, G. On-skin liquid metal inertial sensor. Lab Chip 2017, 17, 3272–3278. [Google Scholar] [CrossRef] [PubMed]
- Wissman, J.; Dickey, M.D.; Majidi, C. Field-Controlled Electrical Switch with Liquid Metal. Adv. Sci. 2017, 4, 1700169. [Google Scholar] [CrossRef] [PubMed] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Description | Fabrication Method | Sensitivity | Performance | Application | Ref |
|---|---|---|---|---|---|---|
| Pressure sensors | 3D LM microfluidic channels incorporated inside the hydrogel matrix | 3D casting molding; LM injection | 1, 10, and 100 kPa | High modulus of the hydrogel; Poor sensitivity | Body-worn motion detector | [72] |
| 2D LM circuit: liquid-based thin PET film microfluidic tactile sensor | Lithography; LM injection | 0.05 kPa–1 | Range of 4 to 100 kPa | Wearable pressure sensor for real-time object grasping monitoring | [71] | |
| Triple-state liquid-based PET film microfluidic tactile sensor | Lithography; LM injection | (2–20) × 10–3 kPa–1 | Range of 2 to 400 kPa | Severe mechanical load | [73] | |
| Based on GaIn microchannels and embedded equivalent Wheatstone bridge circuit | Lithography; LM injection | 0.0835 kPa−1 | Detection limit below 100 Pa with sub-50 Pa resolution | Detect and monitor heart rate from the wrist pulse | [74] | |
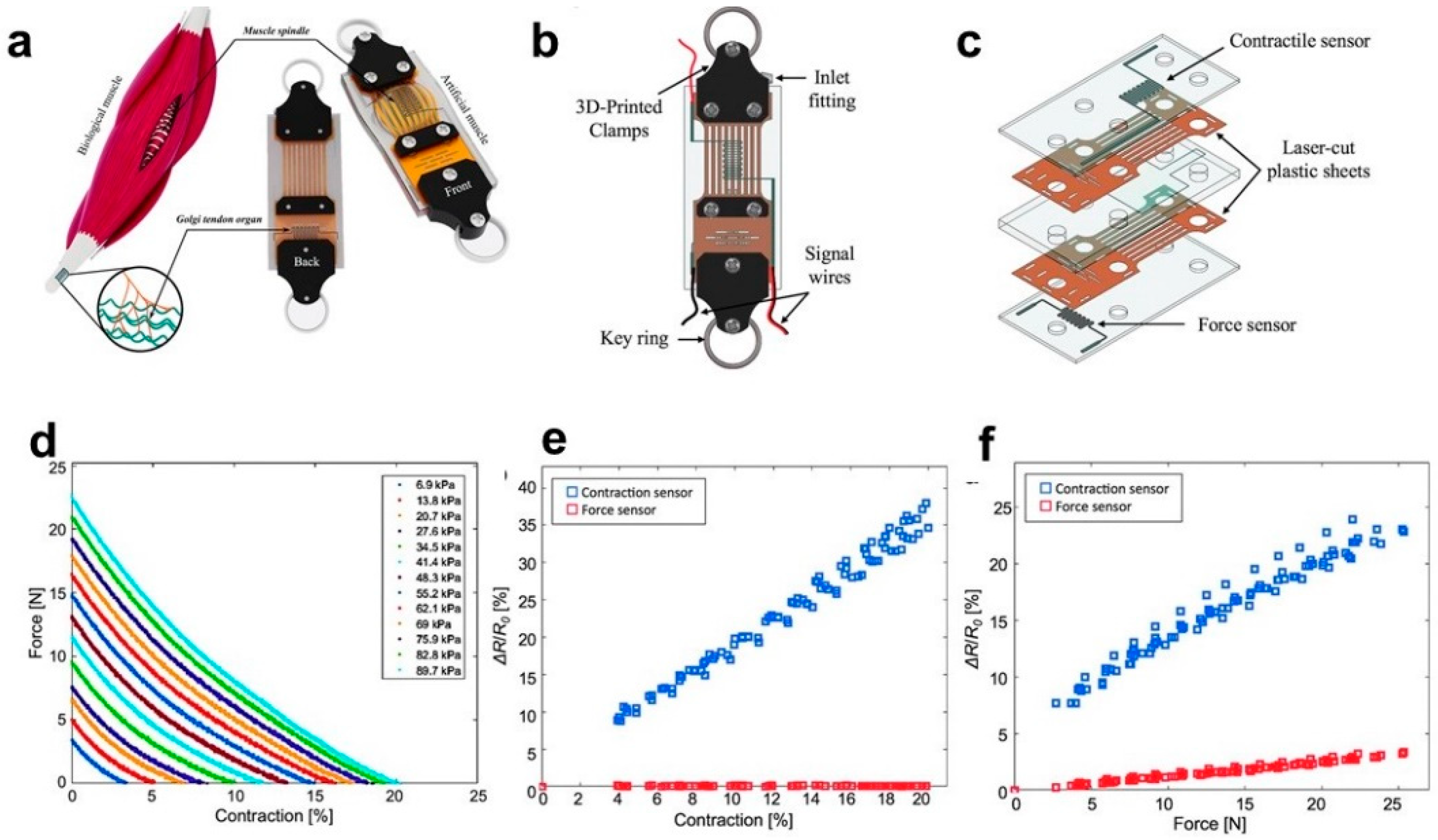
| 3D-printed rigid microbump-integrated liquid metal-based soft pressure sensor | 3D-printed; injection | 0.158 kPa−1 | Range of 0 to 80 kPa; without obvious hysteresis | Epidermal pulse and wireless wearable heel pressure monitoring system | [23] | |
| Liquid metal elastomer foam | Curing and dissolving | Capacitance: 0.992 pF kPa−1 | Negative piezopermittivity; elastic modulus 7.8 kPa | Tactile sensor powered wirelessly | [75] | |
| Soft pressure microsensor with LM electrode | Lithography; LM injection | Resolution: 7.5 mmHg | Pressure range of 20–300 mmHg. | Measure blood pressure in vivo | [76] | |
| GaIn-BiInSn leakage-free electrodes-based sensors | Lithography; LM injection | 0–0.45 Mpa−1 | Double-capacitor sensor; leakage-free electrodes | - | [77] | |
| Strain sensor | LM fiber sensor with hollow elastomeric capillaries | Injection | ΔC/L: 0 to 2.5%; Gauge factor: 0.66 to 0.82 | Strain at 0–100% | Torsion and touch sensor | [64] |
| LM fiber sensor with SEBS hollow fiber | Injection | ΔR/R: 0 to 50% (nonlinear) | Strain at 0–700% | Combinations of good conductivity and stretchability for conductive fibers | [53] | |
| LM fiber sensor with PDMS hollow fiber | Injection | ΔR/R: 0 to 100%; Gauge factor: 2.2 to 3.4 | Strain at 0–140% | Low detection limit (0.3% strain); good repeatability | [62] | |
| Microchannel in commercially available resin | Stereolithography-based 3D printing | ΔR/R: −2.5 to 2.5% | - | Minimum resolution angle of 1° (70° to −70°) | [95] | |
| Surface-embedded metal in polymeric hosts | Casting and peeling off steps | ΔR/R: 0 to 60%(nonlinear) | Strain at 0 to 500%; stress (~0.4 MPa) | Repeatability (ΔR/R <3%) | [96] | |
| Hydrogel shells and LM droplets | Polymerization colloidal cross-linker | ΔR/R:0 to 700%; gauge factor: 1.54 | Toughness (3.54 MJ/m3); fracture stress (1.26 MPa) | Self-healing strain sensor | [98] |
| Type | Detection Gas | Detection Sensitivity | Working Temperature | Evaluation | Ref |
|---|---|---|---|---|---|
| β-Ga2O3 film with Au dispersion | CO | 4–100 ppm | >550 °C | Response in seconds (>700 °C) | [99] |
| β-Ga2O3 film (chemisorption) | H2 | 10−3 bar | 400–650 °C | Response in 10 s; high working temperature | [100] |
| Monoclinic Ga2O3 crystal structure (Ga with In, Sn, and Zn) | NO2 and H2 | 4.5 ppm (NO2) 1.0% (H2) | 150 °C (NO2) 350 °C (H2) | Only discuss the temperature response | [22] |
| Ga2O3-WO3 heterostructures | C2H5OH | 1 to 600 ppm | 275 °C | Response in hundred seconds; ultrathin (10 nm) | [101] |
| β-Ga2O3 (physisorption) | NO2 and NH3 | 1–12 ppm (NO2) 20–99 ppm (NH3) | 100 °C | Poor durability | [102] |
| Types | Fabrication Method | Detection Sensitivity | Detection Range | Evaluation | Ref |
|---|---|---|---|---|---|
| Ga and matching metal wires | Direct printing | 0.5 °C | 0 to 200 °C | High precision; Tiny size | [3] |
| Ga-Bi alloy micro-thermocouple | Microfluidic injection | −10.54 μV/K | 25 to 83 °C | Stable under 90° bending | [103] |
| EGaInSn and SWCNT | Multilayers assemble | 1.0% °C−1 | 15 to 45 °C | Highly stretchable | [106] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Wang, X.; Huang, Z.; Rao, W. Liquid Metal Based Flexible and Implantable Biosensors. Biosensors 2020, 10, 170. https://doi.org/10.3390/bios10110170
Zhang M, Wang X, Huang Z, Rao W. Liquid Metal Based Flexible and Implantable Biosensors. Biosensors. 2020; 10(11):170. https://doi.org/10.3390/bios10110170
Chicago/Turabian StyleZhang, Mingkuan, Xiaohong Wang, Zhiping Huang, and Wei Rao. 2020. "Liquid Metal Based Flexible and Implantable Biosensors" Biosensors 10, no. 11: 170. https://doi.org/10.3390/bios10110170
APA StyleZhang, M., Wang, X., Huang, Z., & Rao, W. (2020). Liquid Metal Based Flexible and Implantable Biosensors. Biosensors, 10(11), 170. https://doi.org/10.3390/bios10110170