Multiscale Frictional Properties of Cotton Fibers: A Review

Abstract
:Table of Contents
| 1. Technological Importance of Friction in Ginning Process | 1 |
| 1.1. Fiber Breakage in Lint Cleaning | 2 |
| 1.2. Friction as a Key Factor | 4 |
| 2. Macroscale Friction Laws | 5 |
| 2.1. Friction Laws for Elastic Materials | 5 |
| 2.2. Friction Laws for Viscoelastic Solids | 6 |
| 2.3. Friction Models for Textile Fibers | 6 |
| 2.4. Howell’s Friction Law Conditions | 8 |
| 2.5. Studies on Cotton Fiber Friction | 9 |
| 3. Nanoscale Friction and Adhesion | 13 |
| 3.1. Nanoscale Friction on Viscoelastic Surfaces | 13 |
| 3.2. Nanoscale Adhesion on Viscoelastic Surfaces | 17 |
| 3.3. Nanomechanical Properties of Plant Tissues | 20 |
| 3.4. Nanofricitonal and Nanomechanical Properties of Cotton Fibers | 21 |
| 4. Future Research | 21 |
| References | 22 |
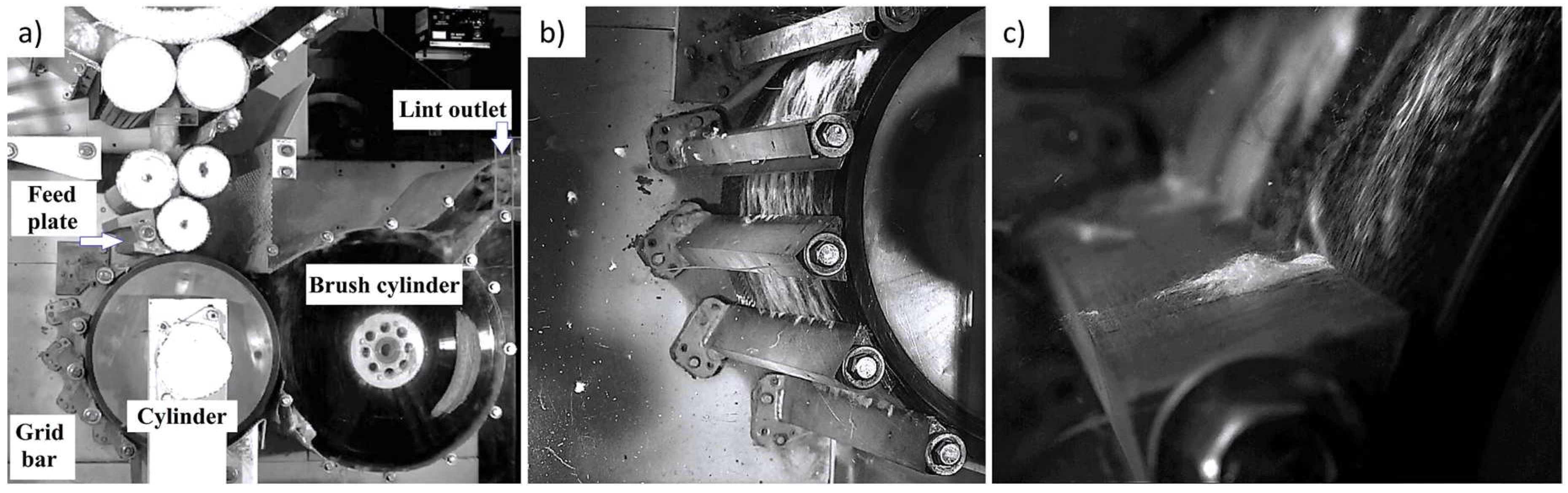
1. Technological Importance of Friction in Ginning Process
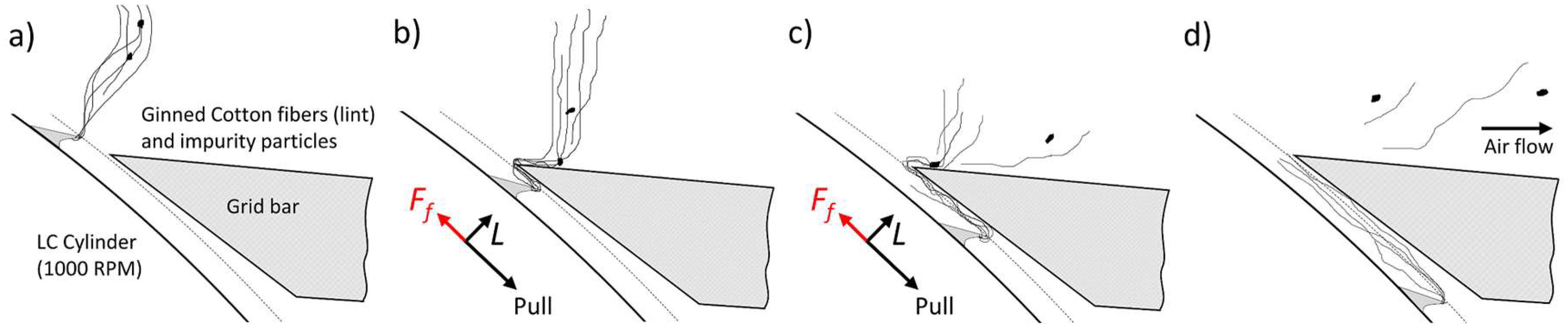
1.1. Fiber Breakage in Lint Cleaning
1.2. Friction as a Key Factor
2. Macroscale Friction Laws
2.1. Friction Laws for Elastic Materials
2.2. Friction Laws for Viscoelastic Solids
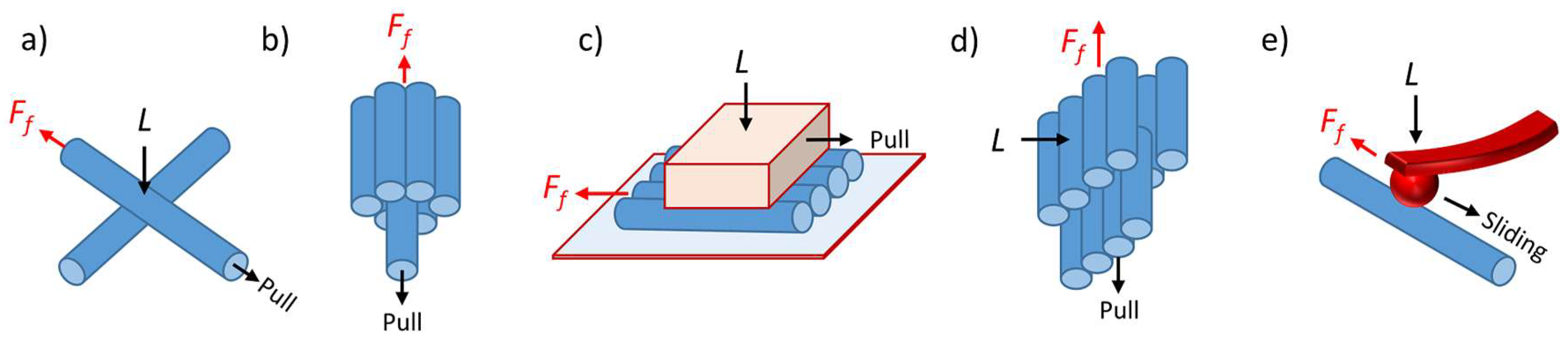
2.3. Friction Models for Textile Fibers
2.4. Howell’s Friction Law Conditions
2.5. Studies on Cotton Fiber Friction
3. Nanoscale Friction and Adhesion
3.1. Nanoscale Friction on Viscoelastic Surfaces
3.2. Nanoscale Adhesion on Viscoelastic Surfaces
3.3. Nanomechanical Properties of Plant Tissues
3.4. Nanofricitonal and Nanomechanical Properties of Cotton Fibers
4. Future Research
Author Contributions
Funding
Conflicts of Interest
References
- Anthony, W.S.; Mayfield, W.D. Cotton Ginners Handbook; United States Department of Agriculture, Agricultural Research Service: Beltsville, MD, USA, 1994; ISBN 0160453690.
- Thomasson, J.A.; Shearer, S.A. Correlation of NIR data with cotton quality characteristics. Trans. ASAE 1995, 38, 1005–1010. [Google Scholar] [CrossRef]
- Sui, R.; Thomasson, J.A.; Ge, Y.; Morgan, C. Multispectral Sensor for In-Situ Cotton Fiber Quality Measurement. Trans. ASABE 2008, 51, 2201–2208. [Google Scholar] [CrossRef] [Green Version]
- Shahriar, M.; Scott-Fleming, I.; Sari-Sarraf, H.; Hequet, E. A machine vision system to estimate cotton fiber maturity from longitudinal view using a transfer learning approach. Mach. Vis. Appl. 2013, 24, 1661–1683. [Google Scholar] [CrossRef]
- Griffin, A.C.; Moore, V.P. Relation of Physical Properties of Cotton to Commerce and Ginning Research. Trans. ASAE 1965, 8, 488–490. [Google Scholar] [CrossRef]
- Stedronsky, V.L. Ginning Processes and Their Effects on Cotton Quality. Trans. ASAE 1966, 9, 282–283. [Google Scholar] [CrossRef]
- Childers, R.E.; Baker, R.V. Effect of Moisture Conditioning on Ginning Performance and Fiber Quality of High Plains Cotton. Trans. ASAE 1978, 21, 379–384. [Google Scholar] [CrossRef]
- Anthony, W.S.; Bragg, C.K. Response of Cotton Fiber Length Distribution to Production and Ginning Practices. Trans. ASAE 1987, 30, 290–296. [Google Scholar] [CrossRef]
- Anthony, W.S. Cotton Length Uniformity and Short Fiber Content. Trans. ASAE 1992, 35, 443–449. [Google Scholar] [CrossRef]
- Anthony, W.S. Impact of Cotton Gin Machinery Sequences on Fiber Value and Quality. Appl. Eng. Agric. 1996, 12, 351–363. [Google Scholar] [CrossRef]
- Hosseinali, F. Investigation on the Tensile Properties of Individual Cotton (Gossypium hirsutum L.) Fibers. M.S. Thesis, Texas Tech University, Lubbock, TX, USA, 2012. [Google Scholar]
- Mangialardi, G.J. Lint Cleaning at Cotton Gins. Cott. Gin Oil Mill Press 1988, 89, 8. [Google Scholar]
- Hughs, S.E.; Armijo, C.B.; Foulk, J.A. Upland fiber changes due to ginning and lint cleaning. J. Cotton Sci. 2013, 17, 115–124. [Google Scholar]
- Sui, R.; Thomasson, J.A.; Byler, R.K.; Boykin, J.C.; Barnes, E.M. Effect of machine-fiber interaction on cotton fiber quality and foreign-matter particle attachment to fiber. J. Cotton Sci. 2010, 153, 145–153. [Google Scholar]
- Anthony, W.S.; Columbus, E.P. Principles of Dust Removal in Gin Machinery: Theoretical and Measured. J. Eng. Ind. 1985, 107, 288. [Google Scholar] [CrossRef]
- Columbus, E.P. Principle Forces Applied to Fine Dust in Lint Cleaners. Trans. ASAE 1985, 28, 2042–2046. [Google Scholar] [CrossRef]
- Barker, G.L.; Baker, R.V. Prediction of Cotton Quality as a Function of Lint Cleaner Operating Parameters. Trans. ASAE 1986, 29, 702–706. [Google Scholar] [CrossRef]
- Baker, R.V. Performance Characteristics of Saw-Type Lint Cleaners. Trans. ASAE 1978, 21, 1081–1087. [Google Scholar] [CrossRef]
- Baker, R.V.; Towery, J.D.; Cocke, J.B. Effects of Lint-Cleaner Combing Ratio and Suction Nozzles on Cotton Dust Levels in Processing. Text. Res. J. 1981, 51, 497–502. [Google Scholar] [CrossRef]
- Leonard, C.G.; Wright, T.E.; Hughs, S.E. Lint Cotton Cleaners with Notched Grid Bars. Trans. ASAE 1982, 25, 204–209. [Google Scholar] [CrossRef]
- Columbus, E.P. Effect of Lint Cleaner Saw Speed and Tooth Density on Cotton Quality. Trans. ASAE 1985, 28, 1692–1696. [Google Scholar] [CrossRef]
- Baker, R.V.; Brashears, A.D. Effects of Grid and Saw Variables on Lint Cleaner Performance. Trans. ASAE 1989, 32, 1138–1142. [Google Scholar] [CrossRef]
- Mangialardi, G.J., Jr. Alternate Carding and Combing Procedures for Cotton Lint Cleaners. Appl. Eng. Agric. 1995, 11, 801–810. [Google Scholar] [CrossRef]
- Le, S. Fiber Quality Properties Produced by Saw-Type Lint Cleaners. Appl. Eng. Agric. 2007, 23, 125–130. [Google Scholar] [CrossRef]
- Gordon, S.G.; Bagshaw, K.M.; Horne, F.A. The Effect of Lint Cleaner Elements, Settings, and Fiber Moisture Content on Fiber Quality. Trans. ASABE 2011, 54, 2267–2278. [Google Scholar] [CrossRef]
- Dever, J.K.; Gannaway, J.R.; Baker, R.V. Influence of cotton fiber strength and fineness on fiber damage during Lint cleaning. Text. Res. J. 1988, 58, 433–438. [Google Scholar] [CrossRef]
- Mangialardi, G.J.; Lalor, W.F. Propensity of cotton varieties to neppiness. Trans. ASAE 1990, 33, 1748–1758. [Google Scholar] [CrossRef]
- Hughs, S.E.; Lalor, W.F.; Wahba, F.T. Relationship of Ginning and Fiber Properties to Dyeing Imperfections. Text. Res. J. 1988, 58, 557–565. [Google Scholar] [CrossRef]
- Israelachvili, J.N. Intermolecular and Surface Forces; Academic Press: Waltham, MA, USA, 1992; ISBN 0123751810. [Google Scholar]
- Gao, J.; Luedtke, W.D.; Gourdon, D.; Ruths, M.; Israelachvili, J.N.; Landman, U. Frictional forces and Amontons’ law: From the molecular to the macroscopic scale. J. Phys. Chem. B 2004, 108, 3410–3425. [Google Scholar] [CrossRef]
- Homola, A.M.; Israelachvili, J.N.; McGuiggan, P.M.; Gee, M.L. Fundamental experimental studies in tribology: The transition from “interfacial” friction of undamaged molecularly smooth surfaces to “normal” friction with wear. Wear 1990, 136, 65–83. [Google Scholar] [CrossRef]
- Tabor, D. Friction, Adhesion and Boundary Lubrication of Polymers. In Advances in Polymer Friction and Wear; Springer: Boston, MA, USA, 1974; pp. 5–30. [Google Scholar]
- Lee, L.-H. Effect of Surface Energetics on Polymer Friction and Wear. In Advances in Polymer Friction and Wear; Springer: Boston, MA, USA, 1974; pp. 31–68. [Google Scholar]
- Zeng, H. Adhesion and Friction Mechanisms of Polymer Surfaces and Thin Films. In Polymer Adhesion, Friction, and Lubrication; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013; pp. 391–442. ISBN 9781118505175. [Google Scholar]
- Sawyer, W.G.; Argibay, N.; Burris, D.L.; Krick, B.A. Mechanistic Studies in Friction and Wear of Bulk Materials. Annu. Rev. Mater. Res. 2014, 44, 395–427. [Google Scholar] [CrossRef]
- Bahadur, S. The development of transfer layers and their role in polymer tribology. Wear 2000, 245, 92–99. [Google Scholar] [CrossRef]
- Makinson, K.R.; Tabor, D. Friction and Transfer of Polytetrafluoroethylene. Nature 1964, 201, 464–466. [Google Scholar] [CrossRef]
- Biswas, S.K.; Vijayan, K. Friction and wear of PTFE—A review. Wear 1992, 158, 193–211. [Google Scholar] [CrossRef]
- Persson, B.N.J. Theory of rubber friction and contact mechanics. J. Chem. Phys. 2001, 115, 3840–3861. [Google Scholar] [CrossRef] [Green Version]
- Nak-Ho, S.; Suh, N.P. Effect of fiber orientation on friction and wear of fiber reinforced polymeric composites. Wear 1979, 53, 129–141. [Google Scholar] [CrossRef]
- Burris, D.L.; Sawyer, W.G. A low friction and ultra low wear rate PEEK/PTFE composite. Wear 2006, 261, 410–418. [Google Scholar] [CrossRef]
- Bahadur, S.; Gong, D. The action of fillers in the modification of the tribological behavior of polymers. Wear 1992, 158, 41–59. [Google Scholar] [CrossRef]
- Burris, D.L.; Boesl, B.; Bourne, G.R.; Sawyer, W.G. Polymeric Nanocomposites for Tribological Applications. Macromol. Mater. Eng. 2007, 292, 387–402. [Google Scholar] [CrossRef]
- Gong, J.P.; Giasson, S.; Kampf, N.; Gohy, J.F.; Jerome, R.; Klein, J.; Gong, J.P. Friction and lubrication of hydrogels—Its richness and complexity. Soft Matter 2006, 2, 544–552. [Google Scholar] [CrossRef]
- Landherr, L.J.T.; Cohen, C.; Agarwal, P.; Archer, L.A. Interfacial Friction and Adhesion of Polymer Brushes. Langmuir 2011, 27, 9387–9395. [Google Scholar] [CrossRef] [PubMed]
- Lee, D.W.; Banquy, X.; Israelachvili, J.N. Stick-slip friction and wear of articular joints. Proc. Natl. Acad. Sci. USA 2013, 110, E567–E574. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Chary, S.; Das, S.; Tamelier, J.; Turner, K.L.; Israelachvili, J.N. Friction and Adhesion of Gecko-Inspired PDMS Flaps on Rough Surfaces. Langmuir 2012, 28, 11527–11534. [Google Scholar] [CrossRef] [PubMed]
- Kang, T.; Banquy, X.; Heo, J.; Lim, C.; Lynd, N.A.; Lundberg, P.; Oh, D.X.; Lee, H.-K.; Hong, Y.-K.; Hwang, D.S.; et al. Mussel-Inspired Anchoring of Polymer Loops That Provide Superior Surface Lubrication and Antifouling Properties. ACS Nano 2016, 10, 930–937. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Howell, H.G. The laws of static friction. Text. Res. J. 1953, 23, 589–591. [Google Scholar] [CrossRef]
- Howell, H.G.; Mazur, J. Amontons’ law and fibre friction. J. Text. Inst. Trans. 1953, 44, T59–T69. [Google Scholar] [CrossRef]
- Howell, H.G. The laws of friction. Nature 1953, 171, 220. [Google Scholar] [CrossRef]
- El Mogahzy, Y.E.; Gupta, B.S. Friction in fibrous materials. Text. Res. J. 1993, 63, 219–230. [Google Scholar] [CrossRef]
- Gupta, B.S.; El Mogahzy, Y.E. Friction in Fibrous Materials: Part I: Structural Model. Text. Res. J. 1991, 61, 547–555. [Google Scholar] [CrossRef]
- Lincoln, B. Frictional and Elastic Properties of High Polymeric Materials. Br. J. Appl. Phys. 1952, 3, 260–263. [Google Scholar] [CrossRef]
- Archard, J.F. Elastic Deformation and the Laws of Friction. Proc. R. Soc. A Math. Phys. Eng. Sci. 1957, 243, 190–205. [Google Scholar] [CrossRef]
- Urbakh, M.; Klafter, J.; Gourdon, D.; Israelachvili, J. The nonlinear nature of friction. Nature 2004, 430, 525–528. [Google Scholar] [CrossRef] [PubMed]
- Maeda, N.; Chen, N.; Tirrell, M.; Israelachvili, J.N. Adhesion and friction mechanisms of polymer-on-polymer surfaces. Science 2002, 297, 379–382. [Google Scholar] [CrossRef] [PubMed]
- Greenwood, J.A.; Tripp, J.H. The contact of two nominally flat rough surfaces. Arch. Proc. Inst. Mech. Eng. 1970, 185, 625–633. [Google Scholar] [CrossRef]
- Cornelissen, B.; de Rooij, M.B.; Rietman, B.; Akkerman, R. Frictional behavior of carbon fiber tows: A contact mechanics model of tow–tow friction. Text. Res. J. 2014, 84, 1476–1488. [Google Scholar] [CrossRef]
- Cornelissen, B.; de Rooij, M.B.; Rietman, B.; Akkerman, R. Frictional behaviour of high performance fibrous tows: A contact mechanics model of tow-metal friction. Wear 2013, 305, 78–88. [Google Scholar] [CrossRef]
- Johnson, K.L.; Kendall, K.; Roberts, A.D. Surface Energy and the Contact of Elastic Solids. Proc. R. Soc. A Math. Phys. Eng. Sci. 1971, 324, 301–313. [Google Scholar] [CrossRef]
- Gupta, B.S.; Bhupender, S. Friction in Textile Materials; Woodhead Publishing Limited: Cambridge, UK, 2008; ISBN 9781855739208. [Google Scholar]
- Sen, K.R.; Ahmad, N. 23—The clinging power of single cotton fibres in relation to their physical properties. J. Text. Inst. Trans. 1938, 29, T258–T279. [Google Scholar] [CrossRef]
- Lord, E. Frictional forces between fringes of fibres. J. Text. Inst. Proc. 1955, 46, P41–P58. [Google Scholar] [CrossRef]
- Du Bois, W.F. Frictional Measurements on Fibrous Materials. Text. Res. J. 1959, 29, 451–466. [Google Scholar] [CrossRef]
- Belser, R.B.; Taylor, J. Frictional Properties of Cotton Fibers; U.S. Department of Agriculture: Washington, DC, USA, 1968.
- Hertel, K.L.; Lawson, R. Shear friction within multiple card web specimens. Text. Res. J. 1970, 40, 472–477. [Google Scholar] [CrossRef]
- Viswanathan, A. Some experiments on the friction of cotton fibers. J. Text. Inst. 1973, 64, 553–557. [Google Scholar] [CrossRef]
- Subramaniam, V.; Sreenivasan, K.; Pillay, K.P.R. Studies in Fibre Friction: Part II-Influence of Fibre Friction on Cohesion, Configuration and Evenness of Fibre Assemblies. Indian J. Fibre Text. Res. 1981, 6, 16–21. [Google Scholar]
- Subramaniam, V.; Sreenivasan, K.; Pillay, K.P.R. Studies in Fibre Friction: Part I-Effect of Friction on Fibre Properties and Processing Performance of Cotton. Indian J. Fibre Text. Res. 1981, 6, 9–15. [Google Scholar]
- El Mogahzy, Y.E.; Broughton, R.M. A new approach for evaluating the frictional behavior of cotton fibers. Text. Res. J. 1993, 63, 465–475. [Google Scholar] [CrossRef]
- Pesacreta, T.C.; Carlson, L.C.; Triplett, B.A. Atomic force microscopy of cotton fiber cell wall surfaces in air and water: Quantitative and qualitative aspects. Planta 1997, 202, 435–442. [Google Scholar] [CrossRef]
- El Mogahzy, Y.; Broughton, R.; Hong Guo, H.; Taylor, R.A. Evaluating staple fiber processing propensity. Text. Res. J. 1998, 68, 835–840. [Google Scholar] [CrossRef]
- Gamble, G.R. Variation in Surface Chemical Constituents of Cotton (Gossypium hirsutum) Fiber as a Function of Maturity. J. Agric. Food Chem. 2003, 51, 7995–7998. [Google Scholar] [CrossRef] [PubMed]
- Nowrouzieh, S.; Sinoimeri, A.; Drean, J.-Y.; Frydrych, R. A new method of measurement of the interfiber force. Text. Res. J. 2007, 77, 489–494. [Google Scholar] [CrossRef]
- Zhang, Z.; Fletcher, I.W.; Hurley, C.R.; Boardman, C.; Doyle, P.; Leggett, G.J.; Poutch, F.; Turner, P.S.; Watson, G.S. Morphological and quantitative frictional measurements of cotton fibres using friction force microscopy. J. Mater. Chem. 2010, 20, 8531–8538. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, Y.; Meng, Y. Mechanical interlocking of cotton fibers on slightly textured surfaces of metallic cylinders. Sci. Rep. 2016, 6, 25403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hosseinali, F.; Thomasson, J.A. Variability of Fiber Friction among Cotton Varieties: Influence of Salient Fiber Physical Metrics. Tribol. Int. 2018, 127, 433–445. [Google Scholar] [CrossRef]
- Hosseinali, F.; Thomasson, J.A.; Batteas, J.D. Friction Measurements on Cotton Fiber Bundles and Single Fibers. Membranes 2018, 3, 5. [Google Scholar]
- Viswanathan, A. Frictional forces in cotton and regenerated cellulosic fibres. J. Text. Inst. Trans. 1966, 57, T30–T41. [Google Scholar] [CrossRef]
- Roedel, C.; Ramkumar, S.S. Surface and Mechanical Property Measurements of H Technology Needle-Punched Nonwovens. Text. Res. J. 2003, 73, 381–385. [Google Scholar] [CrossRef]
- Hertel, K.L. Measurement of Fiber Assembly Shear Energy Transformation. Text. Res. J. 1967, 37, 433–434. [Google Scholar] [CrossRef]
- El Mogahzy, Y.E. Friction and surface characteristics of cotton fibers. In Friction in Textile Materials; Gupta, B., Ed.; Woodhead Publishing Limited: Cambridge, UK, 2008; pp. 225–252. [Google Scholar]
- Ghosh, S.; Rodgers, J.E.; Ortega, A.E. RotorRing measurement of fiber cohesion and bulk properties of staple fibers. Text. Res. J. 1992, 62, 608–613. [Google Scholar] [CrossRef]
- Gamble, G.R. Influence of Surface Electrolyte and Moisture Content on the Frictional Behavior of Cotton Fiber. J. Cotton Sci. 2006, 10, 61–67. [Google Scholar]
- Lewin, M.; Litav, Y.; Shiloh, M. Crimp in cotton: Crimp as a new characteristic of cotton fibres. Nature 1962, 196, 152–153. [Google Scholar] [CrossRef]
- Hecht, A.; Shiloh, M. Studies on Cotton Crimp: Part I: Comparisons Between the Crimp Parameters of Twelve Varieties of Cotton1. Text. Res. J. 1965, 35, 539–546. [Google Scholar] [CrossRef]
- Alexander, E.; Litav, Y.; Peres, H. Crimp in Cotton: Some Aspects of the Behaviour of Crimp of Cotton Fibres. Nature 1962, 196, 153–154. [Google Scholar] [CrossRef]
- Shiloh, M.; Litav, Y. Studies on Cotton Crimp: Part II: The Recovery of Crimp of Cotton Fibers After Successive Loadings. Text. Res. J. 1965, 35, 546–553. [Google Scholar] [CrossRef]
- Alexander, E.; Lewin, M.; Litav, Y.; Peres, H.; Shiloh, M. The Crimp of Cotton Fibers. Text. Res. J. 1962, 32, 898–908. [Google Scholar] [CrossRef]
- Israelachvili, J.; Min, Y.; Akbulut, M.; Alig, A.; Carver, G.; Greene, W.; Kristiansen, K.; Meyer, E.; Pesika, N.; Rosenberg, K.; et al. Recent advances in the surface forces apparatus (SFA) technique. Rep. Prog. Phys. 2010, 73, 36601. [Google Scholar] [CrossRef]
- Binnig, G.; Quate, C.F.; Gerber, C. Atomic Force Microscope. Phys. Rev. Lett. 1986, 56, 930–933. [Google Scholar] [CrossRef] [PubMed]
- Bhushan, B.; Israelachvili, J.N.; Landman, U. Nanotribology: Friction, wear and lubrication at the atomic scale. Nature 1995, 374, 607–616. [Google Scholar] [CrossRef]
- Perry, S.S. Scanning probe microscopy measurements of friction. MRS Bull. 2004, 29, 478–483. [Google Scholar] [CrossRef]
- Szlufarska, I.; Chandross, M.; Carpick, R.W. Recent advances in single-asperity nanotribology. J. Phys. D Appl. Phys. 2008, 41, 123001. [Google Scholar] [CrossRef]
- Mathew Mate, C. On the Road to an Atomic- and Molecular-Level Understanding of Friction. MRS Bull. 2002, 27, 967–971. [Google Scholar] [CrossRef]
- Bhushan, B. Nanotribology and nanomechanics. Wear 2005, 259, 1507–1531. [Google Scholar] [CrossRef]
- Carpick, R.W.; Salmeron, M. Scratching the Surface: Fundamental Investigations of Tribology with Atomic Force Microscopy. Chem. Rev. 1997, 97, 1163–1194. [Google Scholar] [CrossRef] [PubMed]
- Mo, Y.; Turner, K.T.; Szlufarska, I. Friction laws at the nanoscale. Nature 2009, 457, 1116–1119. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Li, Q.; Kalb, W.; Liu, X.Z.; Berger, H.; Carpick, R.W.; Hone, J. Frictional Characteristics of Atomically Thin Sheets. Science 2010, 328, 76–80. [Google Scholar] [CrossRef] [PubMed]
- Brewer, N.J.; Beake, B.D.; Leggett, G.J. Friction Force Microscopy of Self-Assembled Monolayers: Influence of Adsorbate Alkyl Chain Length, Terminal Group Chemistry, and Scan Velocity. Langmuir 2001, 17, 1970–1974. [Google Scholar] [CrossRef]
- Bliznyuk, V.N.; Everson, M.P.; Tsukruk, V.V. Nanotribological Properties of Organic Boundary Lubricants: Langmuir Films Versus Self-Assembled Monolayers. J. Tribol. 1998, 120, 489–495. [Google Scholar] [CrossRef]
- Tsukruk, V.V.; Reneker, D.H. Scanning probe microscopy of organic and polymeric films: From self-assembled monolayers to composite multilayers. Polymer 1995, 36, 1791–1808. [Google Scholar] [CrossRef]
- Tsukruk, V.V. Scanning Probe Microscopy of Polymer Surfaces. Rubber Chem. Technol. 1997, 70, 430–467. [Google Scholar] [CrossRef]
- Johnson, L.L. Atomic Force Microscopy (AFM) for Rubber. Rubber Chem. Technol. 2008, 81, 359–383. [Google Scholar] [CrossRef]
- Ruan, J.-A.; Bhushan, B. Atomic-Scale Friction Measurements Using Friction Force Microscopy: Part I—General Principles and New Measurement Techniques. J. Tribol. 1994, 116, 378–388. [Google Scholar] [CrossRef]
- Bhushan, B.; Ruan, J.-A. Atomic-Scale Friction Measurements Using Friction Force Microscopy: Part II—Application to Magnetic Media. J. Tribol. 1994, 116, 389–396. [Google Scholar] [CrossRef] [Green Version]
- Haugstad, G.; Gladfelter, W.L.; Jones, R.R. Nanotribology on a polymer network film. J. Vac. Sci. Technol. A Vac. Surf. Film 1996, 14, 1864–1869. [Google Scholar] [CrossRef]
- Nisman, R.; Smith, P.; Vancso, G.J. Anisotropic Friction at the Surface of Lamellar Crystals of Poly(oxymethylene) by Lateral Force Microscopy. Langmuir 1994, 10, 1667–1669. [Google Scholar] [CrossRef]
- Bhushan, B.; Koinkar, V.N. Microtribology of PET Polymeric Films. Tribol. Trans. 1995, 38, 119–127. [Google Scholar] [CrossRef]
- Cho, D.-H.; Bhushan, B. Nanofriction and nanowear of polypropylene, polyethylene terephthalate, and high-density polyethylene during sliding. Wear 2016, 352–353, 18–23. [Google Scholar] [CrossRef]
- Kumar, A.; Bhushan, B. Effect of Nanoparticles on Nanomechanical and Nanotribological Properties of Polyethylene Blend Films. Macromol. React. Eng. 2013, 7, 538–548. [Google Scholar] [CrossRef]
- Tambe, N.S.; Bhushan, B. Scale dependence of micro/nano-friction and adhesion of MEMS/NEMS materials, coatings and lubricants. Nanotechnology 2004, 15, 1561–1570. [Google Scholar] [CrossRef]
- Bogdanovic, G.; Tiberg, F.; Rutland, M.W. Sliding Friction between Cellulose and Silica Surfaces. Langmuir 2001, 17, 5911–5916. [Google Scholar] [CrossRef]
- Nordgren, N.; Eronen, P.; Österberg, M.; Laine, J.; Rutland, M.W. Mediation of the Nanotribological Properties of Cellulose by Chitosan Adsorption. Biomacromolecules 2009, 10, 645–650. [Google Scholar] [CrossRef] [PubMed]
- Haugstad, G.; Gladfelter, W.L.; Weberg, E.B.; Weberg, R.T.; Weatherill, T.D. Probing Biopolymers with Scanning Force Methods: Adsorption, Structure, Properties, and Transformation of Gelatin on Mica. Langmuir 1994, 10, 4295–4306. [Google Scholar] [CrossRef]
- Haugstad, G.; Gladfelter, W.L.; Weberg, E.B.; Weberg, R.T.; Jones, R.R. Probing molecular relaxation on polymer surfaces with friction force microscopy. Langmuir 1995, 11, 3473–3482. [Google Scholar] [CrossRef]
- Kajiyama, T.; Tanaka, K.; Takahara, A. Surface Molecular Motion of the Monodisperse Polystyrene Films. Macromolecules 1997, 30, 280–285. [Google Scholar] [CrossRef]
- Tanaka, K.; Takahara, A.; Kajiyama, T. Effect of Polydispersity on Surface Molecular Motion of Polystyrene Films. Macromolecules 1997, 30, 6626–6632. [Google Scholar] [CrossRef]
- Hammerschmidt, J.A.; Moasser, B.; Gladfelter, W.L.; Haugstad, G.; Jones, R.R. Polymer Viscoelastic Properties Measured by Friction Force Microscopy. Macromolecules 1996, 29, 8996–8998. [Google Scholar] [CrossRef]
- Hammerschmidt, J.A.; Gladfelter, W.L.; Haugstad, G. Probing Polymer Viscoelastic Relaxations with Temperature-Controlled Friction Force Microscopy. Macromolecules 1999, 32, 3360–3367. [Google Scholar] [CrossRef]
- Haugstad, G.; Hammerschmidt, J.A.; Gladfelter, W.L. Viscoelasticity in Nanoscale Friction on Thin Polymer Films. In Interfacial Properties on the Submicrometer Scale; Frommer, J., Overney, R.M., Eds.; ACS Symposium Series; American Chemical Society: Washington, DC, USA, 2000; pp. 230–253. [Google Scholar]
- Ahimou, F.; Semmens, M.J.; Novak, P.J.; Haugstad, G. Biofilm cohesiveness measurement using a novel atomic force microscopy methodology. Appl. Environ. Microbiol. 2007, 73, 2897–2904. [Google Scholar] [CrossRef] [PubMed]
- Aoyama, S.; Park, Y.T.; Macosko, C.W.; Ougizawa, T.; Haugstad, G. AFM Probing of Polymer/Nanofiller Interfacial Adhesion and Its Correlation with Bulk Mechanical Properties in a Poly(ethylene terephthalate) Nanocomposite. Langmuir 2014, 30, 12950–12959. [Google Scholar] [CrossRef] [PubMed]
- Brown, H.R. Chain Pullout and Mobility Effects in Friction and Lubrication. Science 1994, 263, 1411–1413. [Google Scholar] [CrossRef] [PubMed]
- Chen, N.; Maeda, N.; Tirrell, M.; Israelachvili, J. Adhesion and Friction of Polymer Surfaces: The Effect of Chain Ends. Macromolecules 2005, 38, 3491–3503. [Google Scholar] [CrossRef]
- Zeng, H.; Maeda, N.; Chen, N.; Tirrell, M.; Israelachvili, J. Adhesion and Friction of Polystyrene Surfaces around Tg. Macromolecules 2006, 39, 2350–2363. [Google Scholar] [CrossRef]
- Butt, H.-J.; Cappella, B.; Kappl, M. Force measurements with the atomic force microscope: Technique, interpretation and applications. Surf. Sci. Rep. 2005, 59, 1–152. [Google Scholar] [CrossRef] [Green Version]
- Burnham, N.A.; Colton, R.J.; Pollock, H.M. Interpretation of force curves in force microscopy. Nanotechnology 1993, 4, 64–80. [Google Scholar] [CrossRef]
- Leckband, D.; Israelachvili, J. Intermolecular forces in biology. Q. Rev. Biophys. 2001, 34, 105–267. [Google Scholar] [CrossRef] [PubMed]
- McConney, M.E.; Singamaneni, S.; Tsukruk, V.V. Probing Soft Matter with the Atomic Force Microscopies: Imaging and Force Spectroscopy. Polym. Rev. 2010, 50, 235–286. [Google Scholar] [CrossRef]
- Cappella, B. Mechanical Properties and Adhesion of a Micro Structured Polymer Blend. Polymers 2011, 3, 1091–1106. [Google Scholar] [CrossRef] [Green Version]
- Alessandrini, A.; Facci, P. AFM: A versatile tool in biophysics. Meas. Sci. Technol. 2005, 16, R65–R92. [Google Scholar] [CrossRef]
- Heinz, W.F.; Hoh, J.H. Spatially resolved force spectroscopy of biological surfaces using the atomic force microscope. Trends Biotechnol. 1999, 17, 143–150. [Google Scholar] [CrossRef]
- Milani, P.; Braybrook, S.A.; Boudaoud, A. Shrinking the hammer: Micromechanical approaches to morphogenesis. J. Exp. Bot. 2013, 64, 4651–4662. [Google Scholar] [CrossRef] [PubMed]
- Ehrhardt, D.W.; Frommer, W.B. New technologies for 21st century plant science. Plant Cell 2012, 24, 374–394. [Google Scholar] [CrossRef] [PubMed]
- Batteas, J.D.; Stark, R.E. Surface and interfacial studies of plant biopolymers. In Molecular Interfacial Phenomena of Polymers and Biopolymers; Elsevier: New York, NY, USA, 2005; pp. 580–608. [Google Scholar]
- Batteas, J.D.; Quan, X.; Weldon, M.K. Adhesion and wear of colloidal silica probed by force microscopy. Tribol. Lett. 1999, 7, 121–128. [Google Scholar] [CrossRef]
- Kawai, A.; Nagata, H.; Takata, M. Characterization of Surface Energetic Behavior by Atomic Force Microscopy. Jpn. J. Appl. Phys. 1992, 31, L977–L979. [Google Scholar] [CrossRef]
- Blackman, G.S.; Mate, C.M.; Philpott, M.R. Interaction forces of a sharp tungsten tip with molecular films on silicon surfaces. Phys. Rev. Lett. 1990, 65, 2270–2273. [Google Scholar] [CrossRef] [PubMed]
- Mate, C.M.; Lorenz, M.R.; Novotny, V.J. Atomic force microscopy of polymeric liquid films. J. Chem. Phys. 1989, 90, 7550–7555. [Google Scholar] [CrossRef]
- Bhushan, B.; Dandavate, C. Thin-film friction and adhesion studies using atomic force microscopy. J. Appl. Phys. 2000, 87, 1201–1210. [Google Scholar] [CrossRef]
- Mizes, H.A.; Loh, K.-G.; Miller, R.J.D.; Ahuja, S.K.; Grabowski, E.F. Submicron probe of polymer adhesion with atomic force microscopy: Dependence on topography and material inhomogeneities. Appl. Phys. Lett. 1991, 59, 2901–2903. [Google Scholar] [CrossRef]
- Sirghi, L.; Nakagiri, N.; Sugisaki, K.; Sugimura, H.; Takai, O. Effect of Sample Topography on Adhesive Force in Atomic Force Spectroscopy Measurements in Air. Langmuir 2000, 16, 7796–7800. [Google Scholar] [CrossRef]
- Eaton, P.; Estarlich, F.F.; Ewen, R.J.; Nevell, T.G.; Smith, J.R.; Tsibouklis, J. Combined Nanoindentation and Adhesion Force Mapping Using the Atomic Force Microscope: Investigations of a Filled Polysiloxane Coating. Langmuir 2002, 18, 10011–10015. [Google Scholar] [CrossRef]
- Eaton, P.; Smith, J.R.; Graham, P.; Smart, J.D.; Nevell, T.G.; Tsibouklis, J. Adhesion Force Mapping of Polymer Surfaces: Factors Influencing Force of Adhesion. Langmuir 2002, 18, 3387–3389. [Google Scholar] [CrossRef]
- Eaton, P.J.; Graham, P.; Smith, J.R.; Smart, J.D.; Nevell, T.G.; Tsibouklis, J. Mapping the Surface Heterogeneity of a Polymer Blend: An Adhesion-Force-Distribution Study Using the Atomic Force Microscope. Langmuir 2000, 16, 7887–7890. [Google Scholar] [CrossRef]
- Begat, P.; Morton, D.A.V.; Staniforth, J.N.; Price, R. The Cohesive-Adhesive Balances in Dry Powder Inhaler Formulations I: Direct Quantification by Atomic Force Microscopy. Pharm. Res. 2004, 21, 1591–1597. [Google Scholar] [CrossRef] [PubMed]
- Mangipudi, V.; Tirrell, M.; Pcius, A.V. Direct measurement of molecular level adhesion between poly(ethylene terephthalate) and polyethylene films: Determination of surface and interfacial energies. J. Adhes. Sci. Technol. 1994, 8, 1251–1270. [Google Scholar] [CrossRef]
- Merrill, W.W.; Pocius, A.V.; Thakker, B.V.; Tirrell, M. Direct measurement of molecular level adhesion forces between biaxially oriented solid polymer films. Langmuir 1991, 7, 1975–1980. [Google Scholar] [CrossRef]
- Tirrell, M. Measurement of Interfacial Energy at Solid Polymer Surfaces. Langmuir 1996, 12, 4548–4551. [Google Scholar] [CrossRef]
- Baselt, D.R.; Baldeschwieler, J.D. Imaging spectroscopy with the atomic force microscope. J. Appl. Phys. 1994, 76, 33–38. [Google Scholar] [CrossRef] [Green Version]
- Rosa-Zeiser, A.; Weilandt, E.; Hild, S.; Marti, O. The simultaneous measurement of elastic, electrostatic and adhesive properties by scanning force microscopy: Pulsed-force mode operation. Meas. Sci. Technol. 1997, 8, 1333–1338. [Google Scholar] [CrossRef]
- Rezende, C.A.; Lee, L.-T.; Galembeck, F. Surface Mechanical Properties of Thin Polymer Films Investigated by AFM in Pulsed Force Mode. Langmuir 2009, 25, 9938–9946. [Google Scholar] [CrossRef] [PubMed]
- Chyasnavichyus, M.; Young, S.L.; Tsukruk, V.V. Mapping micromechanical properties of soft polymer contact lenses. Polymer 2014, 55, 6091–6101. [Google Scholar] [CrossRef]
- Foster, B. New Atomic Force Microscopy (AFM) Approaches Life Sciences Gently, Quantitatively, and Correlatively. Am. Lab. 2012, 44, 24–28. [Google Scholar]
- Zhang, S.; Aslan, H.; Besenbacher, F.; Dong, M. Quantitative biomolecular imaging by dynamic nanomechanical mapping. Chem. Soc. Rev. 2014, 43, 7412–7429. [Google Scholar] [CrossRef] [PubMed]
- Dufrêne, Y.F.; Martínez-Martín, D.; Medalsy, I.; Alsteens, D.; Müller, D.J. Multiparametric imaging of biological systems by force-distance curve–based AFM. Nat. Methods 2013, 10, 847–854. [Google Scholar] [CrossRef] [PubMed]
- Bargel, H.; Koch, K.; Cerman, Z.; Neinhuis, C. Structure-function relationships of the plant cuticle and cuticular waxes—A smart material? Funct. Plant Biol. 2006, 33, 893–910. [Google Scholar] [CrossRef]
- Domínguez, E.; Cuartero, J.; Heredia, A. An overview on plant cuticle biomechanics. Plant Sci. 2011, 181, 77–84. [Google Scholar] [CrossRef] [PubMed]
- Domínguez, E.; Heredia-Guerrero, J.A.; Heredia, A. The biophysical design of plant cuticles: An overview. New Phytol. 2011, 189, 938–949. [Google Scholar] [CrossRef] [PubMed]
- Mirabet, V.; Das, P.; Boudaoud, A.; Hamant, O. The Role of Mechanical Forces in Plant Morphogenesis. Annu. Rev. Plant Biol. 2011, 62, 365–385. [Google Scholar] [CrossRef] [PubMed]
- Koch, K.; Neinhuis, C.; Ensikat, H.; Barthlott, W. Self assembly of epicuticular waxes on living plant surfaces imaged by atomic force microscopy (AFM). J. Exp. Bot. 2004, 55, 711–718. [Google Scholar] [CrossRef] [PubMed]
- Round, A.N.; MacDougall, A.J.; Ring, S.G.; Morris, V.J. Unexpected branching in pectin observed by atomic force microscopy. Carbohydr. Res. 1997, 303, 251–253. [Google Scholar] [CrossRef]
- Round, A.N.; Rigby, N.M.; MacDougall, A.J.; Ring, S.G.; Morris, V.J. Investigating the nature of branching in pectin by atomic force microscopy and carbohydrate analysis. Carbohydr. Res. 2001, 331, 337–342. [Google Scholar] [CrossRef]
- Chatterjee, S.; Sarkar, S.; Oktawiec, J.; Mao, Z.; Niitsoo, O.; Stark, R.E. Isolation and biophysical study of fruit cuticles. J. Vis. Exp. 2012. [Google Scholar] [CrossRef] [PubMed]
- Round, A.N.; Yan, B.; Dang, S.; Estephan, R.; Stark, R.E.; Batteas, J.D. The Influence of Water on the Nanomechanical Behavior of the Plant Biopolyester Cutin as Studied by AFM and Solid-State NMR. Biophys. J. 2000, 79, 2761–2767. [Google Scholar] [CrossRef] [Green Version]
- Bhushan, B.; Jung, Y.C. Micro- and nanoscale characterization of hydrophobic and hydrophilic leaf surfaces. Nanotechnology 2006, 17, 2758–2772. [Google Scholar] [CrossRef]
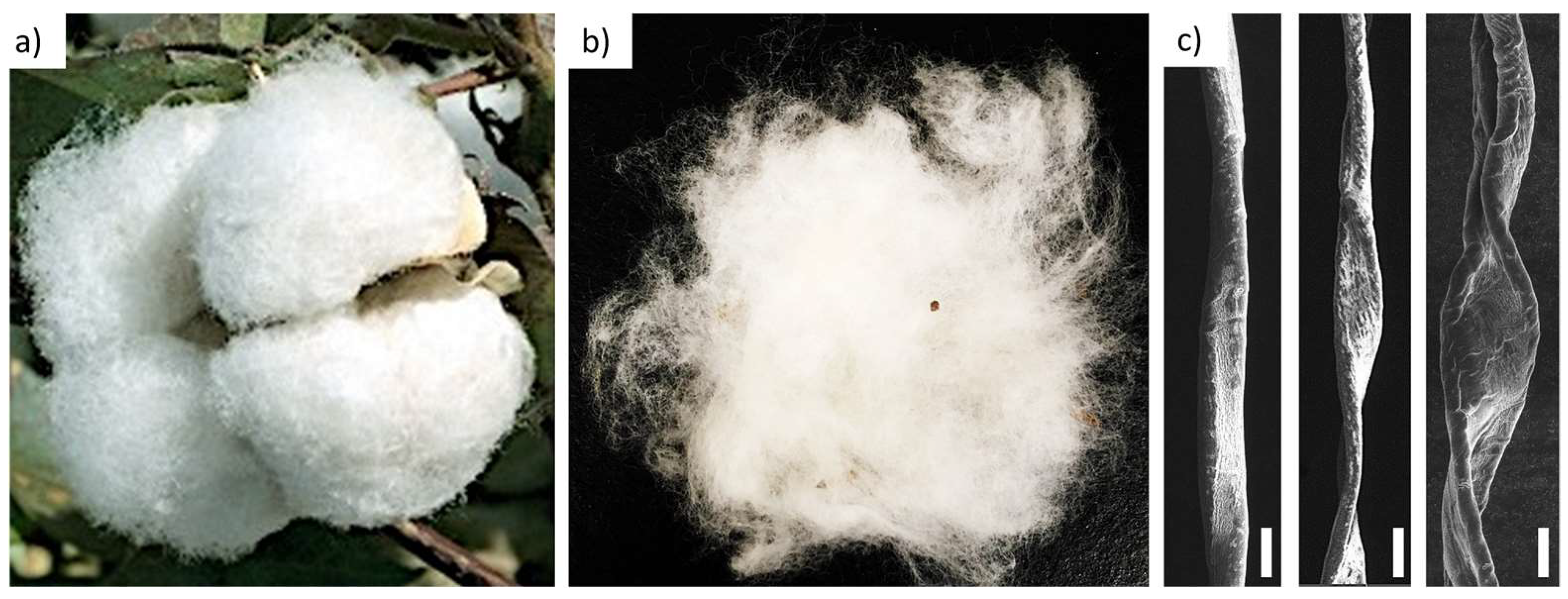
- Flint, A.E. The structure and development of the cotton fibre. Biol. Rev. 1950, 25, 414–434. [Google Scholar] [CrossRef]
- Hartzell-Lawson, M.M.; Hsieh, Y.-L. Characterizing the noncellulosics in developing cotton fibers. Text. Res. J. 2000, 70, 810–819. [Google Scholar] [CrossRef]
- Vaughn, K.C.; Turley, R.B. The primary walls of cotton fibers contain an ensheathing pectin layer. Protoplasma 1999, 209, 226–237. [Google Scholar] [CrossRef]
- Brushwood, D.E. Noncellulosic constituents on raw cotton and their relationship to fiber physical properties. Text. Res. J. 2003, 73, 912–916. [Google Scholar] [CrossRef]
- Cui, X.L.; Price, J.B.; Calamari, T.A.; Hemstreet, J.M.; Meredith, W. Cotton Wax and Its Relationship with Fiber and Yarn Properties. Text. Res. J. 2002, 72, 399–404. [Google Scholar] [CrossRef]
- Marsh, P.B.; Barker, H.D.; Kerr, T.; Butler, M.L. Wax Content as Related to Surface Area of Cotton Fibers. Text. Res. J. 1950, 20, 288–297. [Google Scholar] [CrossRef]
- Maxwell, J.M.; Gordon, S.G.; Huson, M.G. Internal Structure of Mature and Immature Cotton Fibers Revealed by Scanning Probe Microscopy. Text. Res. J. 2003, 73, 1005–1012. [Google Scholar] [CrossRef]
- Koc, S.K. Applications of Atomic Force Microscopy in Textiles. J. Eng. Fibers Fabr. 2015, 10, 169–173. [Google Scholar]
- Lee, I.; Evans, B.R.; Woodward, J. The mechanism of cellulase action on cotton fibers: Evidence from atomic force microscopy. Ultramicroscopy 2000, 82, 213–221. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First author | Experiment Type | No. of Samples | Relationship with Normal Load |
|---|---|---|---|
| K. Sen [63] | Single fiber withdrawing | 17 | - |
| E. Lord [64] | Fiber fringe (combed nearly parallel fibers) | 29 | |
| W. Du Bois [65] | Fiber fringe (combed nearly parallel fibers) | 12 | |
| R. Belser [66] | Crossed fibers | - | |
| K. Hertel [67] | Web of fibers (large scale cardi webs) | 28 | |
| A. Viswanathan [68] | Fiber fringe (combed nearly parallel fibers) | 10 | and |
| V. Subramaniam [69,70] | Fiber fringe (combed nearly parallel fibers) | 17 | |
| Y. El Mogahzy [52,71] | Fiber fringe (combed nearly parallel fibers) | 2 | |
| T. Pesacreta [72] | Morphology with AFM | 1 | - |
| Y. El Mogahzy [73] | Rotor ring | - | - |
| G. Gamble [74] | Rotor ring | 2 | - |
| S. Nowrouzieh [75] | Sliver cohesion | 2 | |
| Z. Zhang [76] | Nanofriction with AFM | 1 | |
| Y. Zhang [77] | Rotating cylinder | 1 | |
| F. Hosseinali [78] | Sliding friction test | 48 | |
| F. Hosseinali [79] | Nanofriction with AFM | 2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hosseinali, F.; Thomasson, J.A. Multiscale Frictional Properties of Cotton Fibers: A Review. Fibers 2018, 6, 49. https://doi.org/10.3390/fib6030049
Hosseinali F, Thomasson JA. Multiscale Frictional Properties of Cotton Fibers: A Review. Fibers. 2018; 6(3):49. https://doi.org/10.3390/fib6030049
Chicago/Turabian StyleHosseinali, Farzad, and J. Alex Thomasson. 2018. "Multiscale Frictional Properties of Cotton Fibers: A Review" Fibers 6, no. 3: 49. https://doi.org/10.3390/fib6030049
APA StyleHosseinali, F., & Thomasson, J. A. (2018). Multiscale Frictional Properties of Cotton Fibers: A Review. Fibers, 6(3), 49. https://doi.org/10.3390/fib6030049