A Survey of Resource Management for Processing-In-Memory and Near-Memory Processing Architectures


Abstract
:1. Introduction
2. Prior Surveys and Scope
3. Data-Centric Computing Architectures
3.1. Processing-In-Memory (PIM) Designs
3.1.1. PIM Using DRAM
3.1.2. PIM Using NVM
3.2. Near-Memory Processing (NMP) Designs
3.2.1. PE Types
3.2.2. Memory Types
3.3. Data Offloading Granularity
4. Resource Management of Data-Centric Computing Systems
4.1. Optimization Objectives
4.1.1. Performance
4.1.2. Energy Efficiency
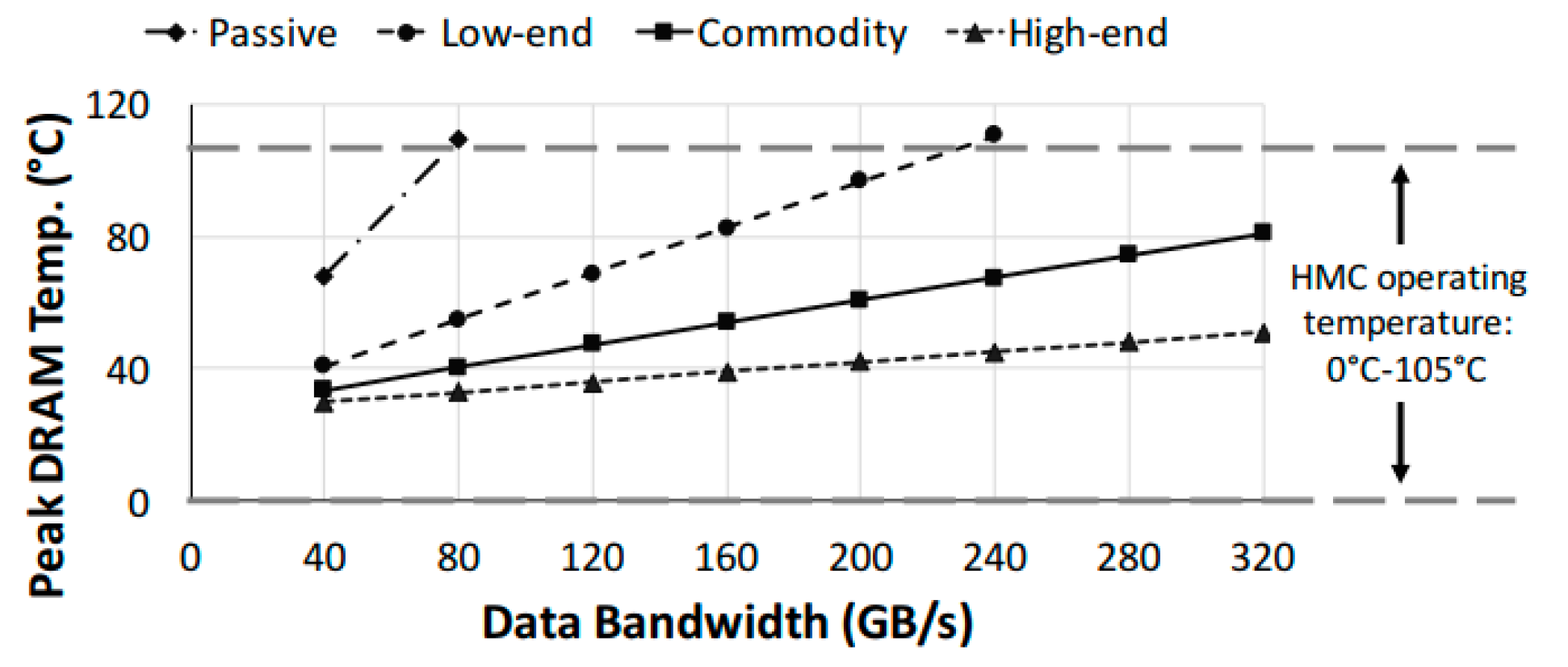
4.1.3. Power and Thermal Efficiency
4.2. Optimization Knobs
4.2.1. Identification of Offloading Workloads
4.2.2. Selection of Memory PE
4.2.3. Timing of Offloads
4.3. Management Techniques
4.3.1. Code Annotation Approaches
- Case Study 1: Ambit—In-Memory Accelerator for Bulk Bitwise Operations Using Commodity DRAM Technology
4.3.2. Compiler-Based Approaches
- Case Study 1: CAIRO
- Case Study 2: A Compiler for Automatic Selection of Suitable Processing-In-Memory Instructions (PRIMO)
4.3.3. Online Heuristic
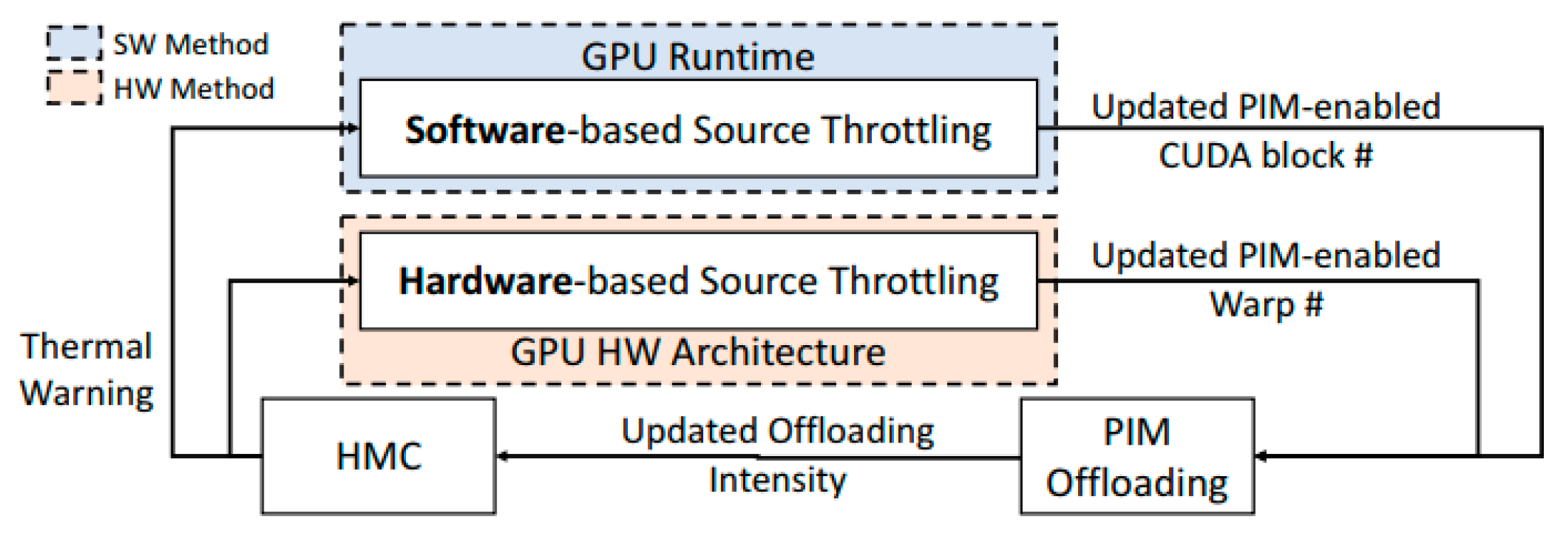
- Case Study 1: CoolPIM—Thermal-Aware Source Throttling for Efficient PIM Instruction Offloading
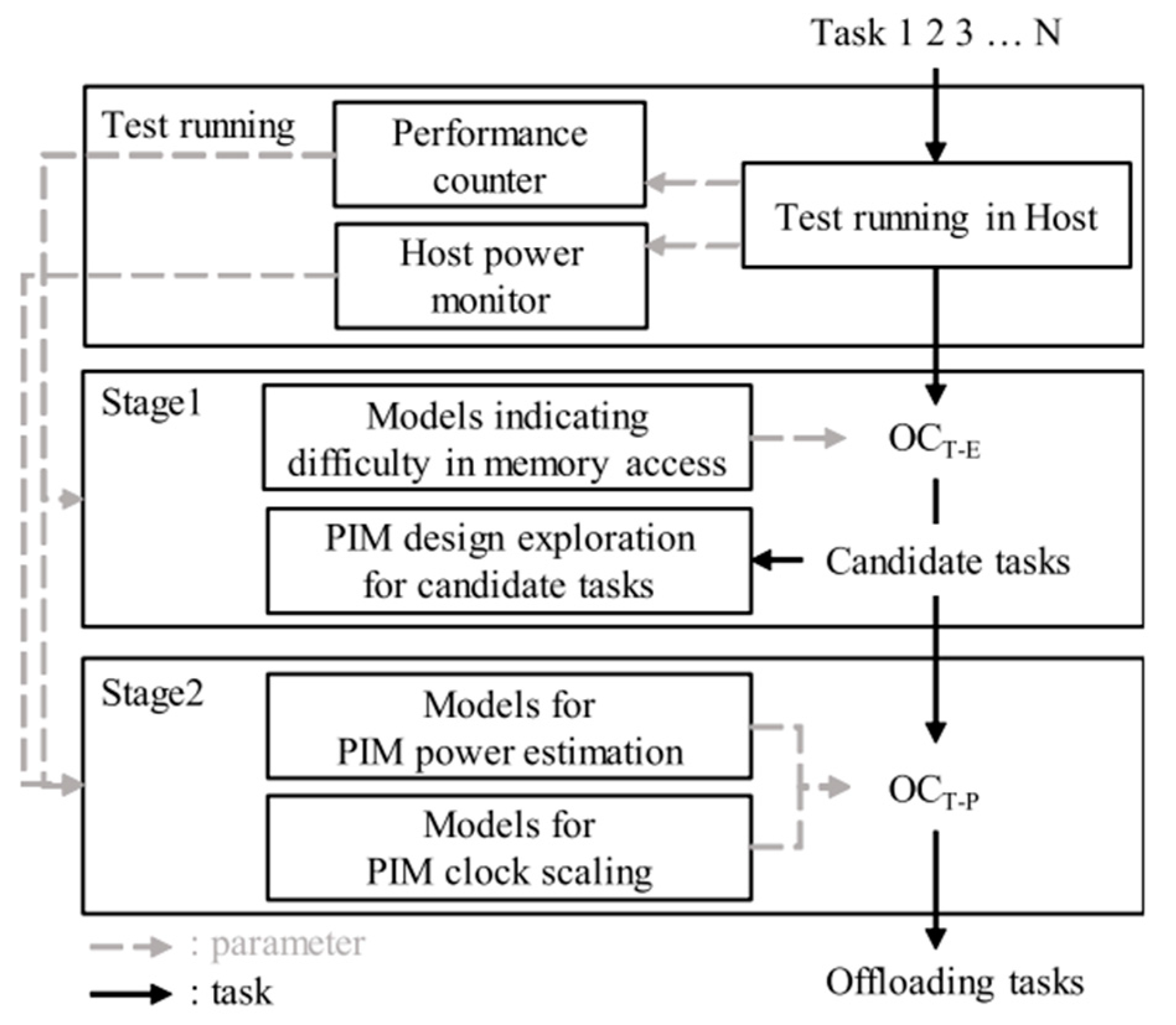
- Case Study 2: Making Better Use of Processing-In-Memory through Potential-Based Task Offloading
5. Conclusions and Future Challenges and Opportunities
- Due to the large variations in DCC architectures proposed to date, the management policies have been very architecture- and application-specific. For example, a policy for a near-memory graph accelerator involves the offloading of specific graph atomic operations, a policy for a stencil accelerator involves the offloading of stencil operations, and so on. This could lead to technology fragmentation, lower overall adoption, and inconsistent system improvements. As an example, an NMP system designed to exploit the high density of connections in small graph areas fails to extract significant speedup when graph connections are more uniform [33]. Future DCC architectures and resource management policies need to explore the generalizability of these systems.
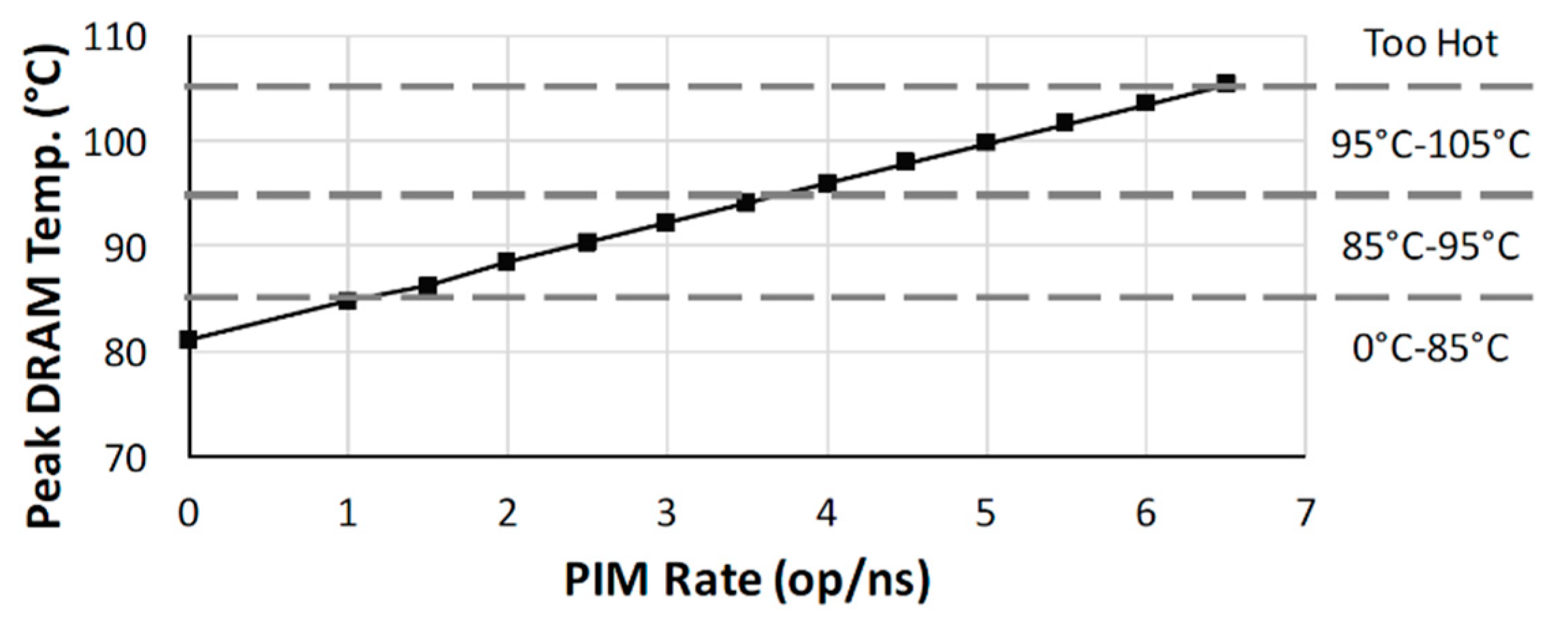
- Nearly all past work has focused on the efficient use of PEs across the system, i.e., they offload tasks which minimize data movement between the host processor and memory. However, high frequency of offloading can cause the memory chip to overheat and lead to a complete shutdown. The issue is addressed reactively in [29] but more proactive and holistic resource management approaches are needed to consider both thermal- and performance-related objectives together.
- Reliability has yet to be considered in the management policies for DCC systems [59]. There is no analysis of the impact of reliability concerns in emerging NVM substrates or DRAM cells on the efficacy of PIM/NMP offloading strategies. Due to deep nanometer scaling, DRAM cell charge retention is becoming increasingly variable and unpredictable. Similarly, the use of unproven and new NVM technologies that are susceptible to disturbances during non-volatile programming brings some level of uncertainty at runtime. Resource management techniques need to be designed in a manner that is robust to these reliability issues in memory substrates when making decisions to offload to memory PEs.
- ML-based applications have exploded in recent years. ML’s potential has been demonstrated for identifying offloading targets [71] using a simple regression-based model with cache performance metrics as the input. More generally, ML techniques like reinforcement learning have proven successful in improving performance by intelligently scheduling workloads on heterogenous systems [101]. As we adopt more general architectural designs, management policies will need to account for the diversity of applications and variability of processing resources. On the other hand, Internet of Things (IoT) devices have great potential to use ML for smart operation, but they lack the resources for training ML models on large datasets. Recent work [102] has shown that executing ML algorithms using near-data vector processors in IoT devices can significantly improve performance. Hence, a promising direction is to leverage the DCC approach to empower IoT devices to process data locally to improve privacy and reduce latency.
- Heterogenous manycore architectures running multi-threaded applications result in complex task mapping, load balancing, and parallelization problems due to the different PEs. Recently, complex network theory, originally inspired by social networks, has been successfully applied to the analysis of instruction and data dependency graphs and identification of “clusters” of tasks to optimally map instructions to PEs [103]. Similarly, complex network theory can be extended to include the PIM and NMP domain in order to optimize software, data orchestration, and hardware platform simultaneously.
Author Contributions
Funding
Conflicts of Interest
References
- Seshadri, V.; Lee, D.; Mullins, T.; Hassan, H.; Boroumand, A.; Kim, J.; Kozuch, M.A.; Mutlu, O.; Gibbons, P.B.; Mowry, T.C. Ambit: In-memory accelerator for bulk bitwise operations using commodity dram technology. In Proceedings of the 50th Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Boston, MA, USA, 14–17 October 2017; pp. 273–287. [Google Scholar] [CrossRef]
- Jeddeloh, J.; Keeth, B. Hybrid memory cube new DRAM architecture increases density and performance. In Proceedings of the Symposium on VLSI Technology (VLSIT), Honolulu, HI, USA, 12–14 June 2012; pp. 87–88. [Google Scholar] [CrossRef]
- Lee, D.U.; Kim, K.W.; Kim, K.W.; Kim, H.; Kim, J.Y.; Park, Y.J.; Kim, J.H.; Kim, D.S.; Park, H.B.; Shin, J.W.; et al. A 1.2V 8Gb 8-channel 128GB/s high-bandwidth memory (HBM) stacked DRAM with effective microbump I/O test methods using 29nm process and TSV. In Proceedings of the IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), San Francisco, CA, USA, 9–13 February 2014; pp. 432–433. [Google Scholar] [CrossRef]
- Devaux, F. The true processing in memory accelerator. In Proceedings of the IEEE Hot Chips 31 Symposium (HCS), Cupertino, CA, USA, 18–20 August 2019; pp. 1–24. [Google Scholar] [CrossRef]
- Siegl, P.; Buchty, R.; Berekovic, M. Data-centric computing frontiers: A survey on processing-in-memory. In Proceedings of the Second International Symposium on Memory Systems (MEMSYS), Alexandria, VA, USA, 3–6 October 2016; pp. 295–308. [Google Scholar] [CrossRef]
- Singh, G.; Chelini, L.; Corda, S.; Javed Awan, A.; Stuijk, S.; Jordans, R.; Corporaal, H.; Boonstra, A.-J. A review of near-memory computing architectures: Opportunities and challenges. In Proceedings of the 21st Euromicro Conference on Digital System Design (DSD), Prague, Czech Republic, 29–31 August 2018; pp. 608–617. [Google Scholar] [CrossRef]
- Mutlu, O.; Ghose, S.; Gómez-Luna, J.; Ausavarungnirun, R. Enabling practical processing in and near memory for data-intensive computing. In Proceedings of the 56th Annual Design Automation Conference (DAC), Las Vegas, NV, USA, 2–6 June 2019; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Gui, C.-Y.; Zheng, L.; He, B.; Liu, C.; Chen, X.-Y.; Liao, X.-F.; Jin, H. A survey on graph processing accelerators: Challenges and opportunities. J. Comput. Sci. Technol. 2019, 34, 339–371. [Google Scholar] [CrossRef] [Green Version]
- Umesh, S.; Mittal, S. A survey of spintronic architectures for processing-in-memory and neural networks. J. Syst. Archit. 2019, 97, 349–372. [Google Scholar] [CrossRef]
- Mittal, S. A survey of ReRAM-based architectures for processing-in-memory and neural networks. Mach. Learn. Knowl. Extr. 2018, 1, 75–114. [Google Scholar] [CrossRef] [Green Version]
- Stone, H.S. A logic-in-memory computer. IEEE Trans. Comput. 1970, C-19, 73–78. [Google Scholar] [CrossRef]
- Elliott, D.G.; Stumm, M.; Snelgrove, W.M.; Cojocaru, C.; Mckenzie, R. Computational RAM: Implementing processors in memory. IEEE Des. Test Comput. 1999, 16, 32–41. [Google Scholar] [CrossRef]
- Gokhale, M.; Holmes, B.; Iobst, K. Processing in memory: The Terasys massively parallel PIM array. Computer 1995, 28, 23–31. [Google Scholar] [CrossRef]
- Patterson, D.; Anderson, T.; Cardwell, N.; Fromm, R.; Keeton, K.; Kozyrakis, C.; Thomas, R.; Yelick, K. A case for intelligent RAM. IEEE Micro 1997, 17, 34–44. [Google Scholar] [CrossRef]
- Draper, J.; Chame, J.; Hall, M.; Steele, C.; Barrett, T.; LaCoss, J.; Granacki, J.; Shin, J.; Chen, C.; Kang, C.W.; et al. The architecture of the DIVA processing-in-memory chip. In Proceedings of the 16th Annual ACM International Conference on Supercomputing (ICS), New York, NY, USA, 22–26 June 2002; pp. 14–25. [Google Scholar] [CrossRef]
- Seshadri, V.; Kim, Y.; Fallin, C.; Lee, D.; Ausavarungnirun, R.; Pekhimenko, G.; Luo, Y.; Mutlu, O.; Gibbons, P.B.; Kozuch, M.A.; et al. RowClone: Fast and energy-efficient in-DRAM bulk data copy and initialization. In Proceedings of the 46th Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Davis, CA, USA, 7–11 December 2013; pp. 185–197. [Google Scholar] [CrossRef]
- Kvatinsky, S.; Belousov, D.; Liman, S.; Satat, G.; Wald, N.; Friedman, E.G.; Kolodny, A.; Weiser, U.C. MAGIC—Memristor-aided logic. IEEE Trans. Circuits Syst. II Exp. Briefs 2014, 61, 895–899. [Google Scholar] [CrossRef]
- Seshadri, V.; Hsieh, K.; Boroum, A.; Lee, D.; Kozuch, M.A.; Mutlu, O.; Gibbons, P.B.; Mowry, T.C. Fast bulk bitwise AND and OR in DRAM. IEEE Comput. Archit. Lett. 2015, 14, 127–131. [Google Scholar] [CrossRef]
- Chi, P.; Li, S.; Xu, C.; Zhang, T.; Zhao, J.; Liu, Y.; Wang, Y.; Xie, Y. PRIME: A novel processing-in-memory architecture for neural network computation in ReRAM-based main memory. In Proceedings of the ACM/IEEE 43rd Annual International Symposium on Computer Architecture (ISCA), Seoul, Korea, 18–22 June 2016; pp. 27–39. [Google Scholar] [CrossRef]
- Jain, S.; Ranjan, A.; Roy, K.; Raghunathan, A. Computing in memory with spin-transfer torque magnetic RAM. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2018, 26, 470–483. [Google Scholar] [CrossRef]
- Farmahini-Farahani, A.; Ahn, J.H.; Morrow, K.; Kim, N.S. NDA: Near-DRAM acceleration architecture leveraging commodity DRAM devices and standard memory modules. In Proceedings of the IEEE 21st International Symposium on High Performance Computer Architecture (HPCA), Burlingame, CA, USA, 7–11 February 2015; pp. 283–295. [Google Scholar] [CrossRef]
- Imani, M.; Kim, Y.; Rosing, T. MPIM: Multi-purpose in-memory processing using configurable resistive memory. In Proceedings of the 22nd Asia and South Pacific Design Automation Conference (ASP-DAC), Chiba, Japan, 16–19 January 2017; pp. 757–763. [Google Scholar] [CrossRef]
- Gao, F.; Tziantzioulis, G.; Wentzlaff, D. ComputeDRAM: In-memory compute using off-the-shelf DRAMs. In Proceedings of the 52nd Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Columbus, OH, USA, 12–16 October 2019; pp. 100–113. [Google Scholar] [CrossRef]
- Li, S.; Xu, C.; Zou, Q.; Zhao, J.; Lu, Y.; Xie, Y. Pinatubo: A processing-in-memory architecture for bulk bitwise operations in emerging non-volatile memories. In Proceedings of the 53rd ACM/EDAC/IEEE Design Automation Conference (DAC), Austin, TX, USA, 5–9 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Li, S.; Niu, D.; Malladi, K.T.; Zheng, H.; Brennan, B.; Xie, Y. DRISA: A DRAM-based reconfigurable in-situ accelerator. In Proceedings of the 50th Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Boston, MA, USA, 14–17 October 2017; pp. 288–301. [Google Scholar]
- Pattnaik, A.; Tang, X.; Jog, A.; Kayiran, O.; Mishra, A.K.; Kandemir, M.T.; Mutlu, O.; Das, C.R. Scheduling techniques for GPU architectures with processing-in-memory capabilities. In Proceedings of the International Conference on Parallel Architecture and Compilation Techniques (PACT), Haifa, Israel, 11–15 September 2016; pp. 31–44. [Google Scholar] [CrossRef]
- Hsieh, K.; Ebrahim, E.; Kim, G.; Chatterjee, N.; O’Connor, M.; Vijaykumar, N.; Mutlu, O.; Keckler, S.W. Transparent offloading and mapping (TOM): Enabling programmer-transparent near-data processing in GPU systems. In Proceedings of the ACM/IEEE 43rd Annual International Symposium on Computer Architecture (ISCA), Seoul, Korea, 18–22 June 2016; pp. 204–216. [Google Scholar] [CrossRef]
- Ahn, J.; Yoo, S.; Mutlu, O.; Choi, K. PIM-enabled instructions: A low-overhead, locality-aware processing-in-memory architecture. In Proceedings of the ACM/IEEE 42nd Annual International Symposium on Computer Architecture (ISCA), Portland, OR, USA, 13–17 June 2015; pp. 336–348. [Google Scholar] [CrossRef]
- Nai, L.; Hadidi, R.; Xiao, H.; Kim, H.; Sim, J.; Kim, H. CoolPIM: Thermal-aware source throttling for efficient PIM instruction offloading. In Proceedings of the IEEE International Parallel and Distributed Processing Symposium (IPDPS), Vancouver, BC, Canada, 21–25 May 2018; pp. 680–689. [Google Scholar] [CrossRef]
- Nair, R.; Antao, S.F.; Bertolli, C.; Bose, P.; Brunheroto, J.R.; Chen, T.; Cher, C.-Y.; Costa, C.H.A.; Doi, J.; Evangelinos, C.; et al. Active memory cube: A processing-in-memory architecture for exascale systems. IBM J. Res. Dev. 2015, 59, 17:1–17:14. [Google Scholar] [CrossRef] [Green Version]
- Boroumand, A.; Ghose, S.; Patel, M.; Hassan, H.; Lucia, B.; Hsieh, K.; Malladi, K.T.; Zheng, H.; Mutlu, O. LazyPIM: An efficient cache coherence mechanism for processing-in-memory. IEEE Comput. Archit. Lett. 2017, 16, 46–50. [Google Scholar] [CrossRef]
- Nai, L.; Hadidi, R.; Sim, J.; Kim, H.; Kumar, P.; Kim, H. GraphPIM: Enabling instruction-level PIM offloading in graph computing frameworks. In Proceedings of the IEEE International Symposium on High Performance Computer Architecture (HPCA), Austin, TX, USA, 4–8 February 2017; pp. 457–468. [Google Scholar] [CrossRef]
- Addisie, A.; Bertacco, V. Centaur: Hybrid processing in on/off-chip memory architecture for graph analytics. In Proceedings of the 57th Annual Design Automation Conference (DAC), Virtual DAC, San Francisco, CA, USA, 20–24 July 2020. [Google Scholar]
- Zhuo, Y.; Wang, C.; Zhang, M.; Wang, R.; Niu, D.; Wang, Y.; Qian, X. GraphQ: Scalable PIM-based graph processing. In Proceedings of the 52nd Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Columbus, OH, USA, 12–16 October 2019; pp. 712–725. [Google Scholar] [CrossRef]
- Dai, G.; Huang, T.; Chi, Y.; Zhao, J.; Sun, G.; Liu, Y.; Wang, Y.; Xie, Y.; Yang, H. GraphH: A processing-in-memory architecture for large-scale graph processing. IEEE Trans. Comput. Aided Design Integr. Circuits Syst. 2019, 38, 640–653. [Google Scholar] [CrossRef]
- Zhang, M.; Zhuo, Y.; Wang, C.; Gao, M.; Wu, Y.; Chen, K.; Kozyrakis, C.; Qian, X. GraphP: Reducing communication for PIM-based graph processing with efficient data partition. In Proceedings of the IEEE International Symposium on High Performance Computer Architecture (HPCA), Vienna, Austria, 24–28 February 2018; pp. 544–557. [Google Scholar] [CrossRef]
- Xie, C.; Song, S.L.; Wang, J.; Zhang, W.; Fu, X. Processing-in-memory enabled graphics processors for 3D rendering. In Proceedings of the IEEE International Symposium on High Performance Computer Architecture (HPCA), Austin, TX, USA, 4–8 February 2017; pp. 637–648. [Google Scholar] [CrossRef]
- Kim, B.-H.; Rhee, C.E. Making better use of processing-in-memory through potential-based task offloading. IEEE Access 2020, 8, 61631–61641. [Google Scholar] [CrossRef]
- Li, J.; Wang, X.; Tumeo, A.; Williams, B.; Leidel, J.D.; Chen, Y. PIMS: A lightweight processing-in-memory accelerator for stencil computations. In Proceedings of the International Symposium on Memory Systems (MemSys), Washington DC, USA, 30 September–3 October 2019; pp. 41–52. [Google Scholar] [CrossRef]
- Boroumand, A.; Ghose, S.; Kim, Y.; Ausavarungnirun, R.; Shiu, E.; Thakur, R.; Kim, D.; Kuusela, A.; Knies, A.; Ranganathan, P.; et al. Google workloads for consumer devices: Mitigating data movement bottlenecks. In Proceedings of the 23rd International Conference on Architectural Support for Programming Languages and Operating Systems (ASPLOS), Williamsburg, VA, USA, 24–28 March 2018; pp. 316–331. [Google Scholar] [CrossRef]
- Gao, M.; Kozyrakis, C. HRL: Efficient and flexible reconfigurable logic for near-data processing. In Proceedings of the IEEE International Symposium on High Performance Computer Architecture (HPCA), Barcelona, Spain, 12–16 March 2016; pp. 126–137. [Google Scholar] [CrossRef]
- Hadidi, R.; Nai, L.; Kim, H.; Kim, H. CAIRO: A compiler-assisted technique for enabling instruction-level offloading of processing-in-memory. ACM Trans. Archit. Code Optim. 2017, 14, 1–25. [Google Scholar] [CrossRef]
- Angizi, S.; Fahmi, N.A.; Zhang, W.; Fan, D. PIM-Assembler: A processing-in-memory platform for genome assembly. In Proceedings of the 57th Annual Design Automation Conference (DAC) Virtual DAC, 20–24 July 2020; p. 6. [Google Scholar]
- Seshadri, V.; Lee, D.; Mullins, T.; Hassan, H.; Boroumand, A.; Kim, J.; Kozuch, M.A.; Mutlu, O.; Gibbons, P.B.; Mowry, T.C. Buddy-RAM: Improving the performance and efficiency of bulk bitwise operations using DRAM. arXiv 2016, arXiv:1611.09988. [Google Scholar]
- Sutradhar, P.R.; Connolly, M.; Bavikadi, S.; Pudukotai Dinakarrao, S.M.; Indovina, M.A.; Ganguly, A. pPIM: A Programmable Processor-in-Memory Architecture with Precision-Scaling for Deep Learning. IEEE Comput. Archit. Lett. 2020, 19, 118–121. [Google Scholar] [CrossRef]
- Akerib, A.; Ehrman, E. In-Memory Computational Device 2017. U.S. Patent 9653166B2, 16 May 2017. [Google Scholar]
- Akerib, A.; Agam, O.; Ehrman, E.; Meyassed, M. Using Storage Cells to Perform Computation. U.S. Patent 8238173B2, 7 August 2012. [Google Scholar]
- Kim, Y.-B.; Chen, T. Assessing merged DRAM/logic technology. In Proceedings of the IEEE International Symposium on Circuits and Systems. Circuits and Systems Connecting the World (ISCAS), Atlanta, GA, USA, 15 May 1996; pp. 133–136. [Google Scholar] [CrossRef]
- Kim, Y.; Daly, R.; Kim, J.; Fallin, C.; Lee, J.H.; Lee, D.; Wilkerson, C.; Lai, K.; Mutlu, O. Flipping bits in memory without accessing them: An experimental study of DRAM disturbance errors. In Proceedings of the ACM/IEEE 41st International Symposium on Computer Architecture (ISCA), Minneapolis, MN, USA, 14–18 June 2014; pp. 361–372. [Google Scholar] [CrossRef]
- Mutlu, O.; Kim, J.S. RowHammer: A retrospective. IEEE Trans. Comput. Aided Design Integr. Circuits Syst. 2020, 39, 1555–1571. [Google Scholar] [CrossRef] [Green Version]
- Lee, B.C.; Ipek, E.; Mutlu, O.; Burger, D. Architecting phase change memory as a scalable DRAM alternative. In Proceedings of the 36th Annual International Symposium on Computer Architecture (ISCA), Austin, TX, USA, 20–24 June 2009; pp. 2–13. [Google Scholar] [CrossRef] [Green Version]
- Qureshi, M.K.; Franceschini, M.M.; Lastras-Montaño, L.A. Improving read performance of phase change memories via write cancellation and write pausing. In Proceedings of the 16th International Symposium on High-Performance Computer Architecture (HPCA), Bangalore, India, 9–14 January 2010; pp. 1–11. [Google Scholar] [CrossRef]
- Thakkar, I.G.; Pasricha, S. DyPhase: A Dynamic Phase Change Memory Architecture with Symmetric Write Latency and Restorable Endurance. IEEE Trans. Comput. Aided Design Integr. Circuits Syst. 2018, 37, 1760–1773. [Google Scholar] [CrossRef]
- Pan, C.; Xie, M.; Hu, J.; Chen, Y.; Yang, C. 3M-PCM: Exploiting multiple write modes MLC phase change main memory in embedded systems. In Proceedings of the International Conference on Hardware/Software Codesign and System Synthesis (CODES+ISSS), New Delhi, India, 12–17 October 2014; pp. 1–10. [Google Scholar] [CrossRef]
- Kadetotad, D.; Xu, Z.; Mohanty, A.; Chen, P.-Y.; Lin, B.; Ye, J.; Vrudhula, S.; Yu, S.; Cao, Y.; Seo, J. Parallel architecture with resistive crosspoint array for dictionary learning acceleration. IEEE Trans. Emerg. Sel. Top. Circuits Syst. 2015, 5, 194–204. [Google Scholar] [CrossRef]
- Shafiee, A.; Nag, A.; Muralimanohar, N.; Balasubramonian, R.; Strachan, J.P.; Hu, M.; Williams, R.S.; Srikumar, V. ISAAC: A convolutional neural network accelerator with in-situ analog arithmetic in crossbars. In Proceedings of the ACM/IEEE 43rd Annual International Symposium on Computer Architecture (ISCA), Seoul, Korea, 18–22 June 2016; pp. 14–26. [Google Scholar] [CrossRef]
- Song, L.; Zhuo, Y.; Qian, X.; Li, H.; Chen, Y. GraphR: Accelerating graph processing using ReRAM. In Proceedings of the IEEE International Symposium on High Performance Computer Architecture (HPCA), Vienna, Austria, 24–28 February 2018; pp. 531–543. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, R.; Yavits, L.; Ginosar, R.; Weiser, U. A Resistive CAM Processing-in-Storage Architecture for DNA Sequence Alignment. IEEE Micro 2017, 37, 20–28. [Google Scholar] [CrossRef] [Green Version]
- Imani, M.; Gupta, S.; Rosing, T. Ultra-efficient processing in-memory for data intensive applications. In Proceedings of the 54th Annual Design Automation Conference (DAC), Austin, TX, USA, 18–22 June 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Kong, P.; Yu, H. Logic-in-memory based big-data computing by nonvolatile domain-wall nanowire devices. In Proceedings of the 13th Non-Volatile Memory Technology Symposium (NVMTS), Minneapolis, MN, USA, 12–14 August 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Butzen, P.F.; Slimani, M.; Wang, Y.; Cai, H.; Naviner, L.A.B. Reliable majority voter based on spin transfer torque magnetic tunnel junction device. Electron. Lett. 2016, 52, 47–49. [Google Scholar] [CrossRef]
- Kang, W.; Chang, L.; Wang, Z.; Zhao, W. In-memory processing paradigm for bitwise logic operations in STT-MRAM. In Proceedings of the IEEE International Magnetics Conference (INTERMAG), Dublin, Ireland, 24–28 April 2017. [Google Scholar] [CrossRef]
- Fan, D.; Angizi, S.; He, Z. In-memory computing with spintronic devices. In Proceedings of the IEEE Computer Society Annual Symposium on VLSI (ISVLSI), Bochum, Germany, 3–5 July 2017; pp. 683–688. [Google Scholar] [CrossRef]
- Fan, D.; He, Z.; Angizi, S. Leveraging spintronic devices for ultra-low power in-memory computing: Logic and neural network. In Proceedings of the IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; pp. 1109–1112. [Google Scholar] [CrossRef]
- Parveen, F.; He, Z.; Angizi, S.; Fan, D. HielM: Highly flexible in-memory computing using STT MRAM. In Proceedings of the 23rd Asia and South Pacific Design Automation Conference (ASP-DAC), Jeju, Korea, 22–25 January 2018; pp. 361–366. [Google Scholar] [CrossRef]
- Bhosale, S.; Pasricha, S. SLAM: High performance and energy efficient hybrid last level cache architecture for multicore embedded systems. In Proceedings of the IEEE International Conference on Embedded Software and Systems (ICESS), Las Vegas, NV, USA, 2–3 June 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Imani, M.; Peroni, D.; Rosing, T. Nvalt: Nonvolatile approximate lookup table for GPU acceleration. IEEE Embed. Syst. Lett. 2018, 10, 14–17. [Google Scholar] [CrossRef]
- Imani, M.; Gupta, S.; Arredondo, A.; Rosing, T. Efficient query processing in crossbar memory. In Proceedings of the IEEE/ACM International Symposium on Low Power Electronics and Design (ISLPED), Taipei, Taiwan, 24–26 July 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Xia, L.; Tang, T.; Huangfu, W.; Cheng, M.; Yin, X.; Li, B.; Wang, Y.; Yang, H. Switched by input: Power efficient structure for RRAM-based convolutional neural network. In Proceedings of the 2016 53nd ACM/EDAC/IEEE Design Automation Conference (DAC), Austin, TX, USA, 5–9 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Tang, X.; Kislal, O.; Kandemir, M.; Karakoy, M. Data movement aware computation partitioning. In Proceedings of the 50th Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Boston, MA, USA, 14–17 October 2017; pp. 730–744. [Google Scholar] [CrossRef]
- Tsai, P.-A.; Chen, C.; Sanchez, D. Adaptive scheduling for systems with asymmetric memory hierarchies. In Proceedings of the 51st Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Fukuoka, Japan, 20–24 October 2018; pp. 641–654. [Google Scholar] [CrossRef]
- Lockerman, E.; Feldmann, A.; Bakhshalipour, M.; Stanescu, A.; Gupta, S.; Sanchez, D.; Beckmann, N. Livia: Data-centric computing throughout the memory hierarchy. In Proceedings of the Twenty-Fifth International Conference on Architectural Support for Programming Languages and Operating Systems (ASPLOS), Lausanne, Switzerland, 16–20 March 2020; pp. 417–433. [Google Scholar] [CrossRef] [Green Version]
- Wen, W.; Yang, J.; Zhang, Y. Optimizing power efficiency for 3D stacked GPU-in-memory architecture. Microprocess. Microsyst. 2017, 49, 44–53. [Google Scholar] [CrossRef]
- Choi, J.; Kim, B.; Jeon, J.-Y.; Lee, H.-J.; Lim, E.; Rhee, C.E. POSTER: GPU based near data processing for image processing with pattern aware data allocation and prefetching. In Proceedings of the 28th International Conference on Parallel Architectures and Compilation Techniques (PACT), Seattle, WA, USA, 23–26 September 2019; pp. 469–470. [Google Scholar] [CrossRef]
- Zhang, D.; Jayasena, N.; Lyashevsky, A.; Greathouse, J.L.; Xu, L.; Ignatowski, M. TOP-PIM: Throughput-oriented programmable processing in memory. In Proceedings of the 23rd International Symposium on High-Performance Parallel and Distributed Computing (HPDC), Vancouver, BC, Canada, 23–27 June 2014; pp. 85–98. [Google Scholar] [CrossRef]
- Hsieh, K.; Khan, S.; Vijaykumar, N.; Chang, K.K.; Boroumand, A.; Ghose, S.; Mutlu, O. Accelerating pointer chasing in 3D-stacked memory: Challenges, mechanisms, evaluation. In Proceedings of the IEEE 34th International Conference on Computer Design (ICCD), Scottsdale, AZ, USA, 2–5 October 2016; pp. 25–32. [Google Scholar] [CrossRef]
- Scrbak, M.; Greathouse, J.L.; Jayasena, N.; Kavi, K. DVFS space exploration in power constrained processing-in-memory systems. In Proceedings of the 30th International Conference on Architecture of Computing Systems (ARCS), Vienna, Austria, 3–6 April 2017; pp. 221–233. [Google Scholar] [CrossRef]
- Eckert, Y.; Jayasena, N.; Loh, G.H. Thermal feasibility of die-stacked processing in memory. In Proceedings of the 2nd Workshop on Near-Data Processing (WoNDP), Cambridge, UK, 14 December 2014. [Google Scholar]
- Nai, L.; Hadidi, R.; Xiao, H.; Kim, H.; Sim, J.; Kim, H. Thermal-aware processing-in-memory instruction offloading. J. Parallel Distrib. Comput. 2019, 130, 193–207. [Google Scholar] [CrossRef]
- Gokhale, M.; Lloyd, S.; Hajas, C. Near memory data structure rearrangement. In Proceedings of the International Symposium on Memory Systems (MEMSYS), Washington DC, USA, 5–8 October 2015; pp. 283–290. [Google Scholar] [CrossRef] [Green Version]
- Hybrid Memory Cube Specification 2.1. 2 February 2017. Available online: https://web.archive.org/web/20170202004433/; http://hybridmemorycube.org/files/SiteDownloads/HMC-30G-VSR_HMCC_Specification_Rev2.1_20151105.pdf (accessed on 12 August 2020).
- Ankit, A.; Sengupta, A.; Panda, P.; Roy, K. RESPARC: A reconfigurable and energy-efficient architecture with memristive crossbars for deep spiking neural networks. In Proceedings of the 54th Annual Design Automation Conference (DAC), Austin, TX, USA, 18–22 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Mittal, S.; Vetter, J.S. AYUSH: A technique for extending lifetime of SRAM-NVM hybrid caches. IEEE Comput. Archit. Lett. 2015, 14, 115–118. [Google Scholar] [CrossRef]
- Tang, S.; Yin, S.; Zheng, S.; Ouyang, P.; Tu, F.; Yao, L.; Wu, J.; Cheng, W.; Liu, L.; Wei, S. AEPE: An area and power efficient RRAM crossbar-based accelerator for deep CNNs. In Proceedings of the IEEE 6th Non-Volatile Memory Systems and Applications Symposium (NVMSA), Hsinchu, Taiwan, 16–18 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Zha, Y.; Li, J. IMEC: A fully morphable in-memory computing fabric enabled by resistive crossbar. IEEE Comput. Archit. Lett. 2017, 16, 123–126. [Google Scholar] [CrossRef]
- Zidan, M.A.; Jeong, Y.; Shin, J.H.; Du, C.; Zhang, Z.; Lu, W.D. Field-programmable crossbar array (FPCA) for reconfigurable computing. IEEE Trans. Multi-Scale Comput. Syst. 2018, 4, 698–710. [Google Scholar] [CrossRef] [Green Version]
- Zheng, L.; Zhao, J.; Huang, Y.; Wang, Q.; Zeng, Z.; Xue, J.; Liao, X.; Jin, H. Spara: An energy-efficient ReRAM-based accelerator for sparse graph analytics applications. In Proceedings of the IEEE International Parallel and Distributed Processing Symposium (IPDPS), New Orleans, LA, USA, 18–22 May 2020; pp. 696–707. [Google Scholar] [CrossRef]
- Challapalle, N.; Rampalli, S.; Jao, N.; Ramanathan, A.; Sampson, J.; Narayanan, V. FARM: A flexible accelerator for recurrent and memory augmented neural networks. J. Signal. Process. Syst. 2020, 92, 1–15. [Google Scholar] [CrossRef]
- Abunahla, H.; Halawani, Y.; Alazzam, A.; Mohammad, B. NeuroMem: Analog graphene-based resistive memory for artificial neural networks. Sci. Rep. 2020, 10, 9473. [Google Scholar] [CrossRef]
- Alibart, F.; Zamanidoost, E.; Strukov, D.B. Pattern classification by memristive crossbar circuits using ex situ and in situ training. Nat. Commun. 2013, 4, 2072. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Q.; Alachiotis, N.; Akin, B.; Sadi, F.; Xu, G.; Low, T.M.; Pileggi, L.; Hoe, J.C.; Franchetti, F. 3D-stacked memory-side acceleration: Accelerator and system design. In Proceedings of the Workshop on Near-Data Processing (WoNDP), Cambridge, UK, 14 December 2014. [Google Scholar]
- Ahmed, H.; Santos, P.C.; Lima, J.P.C.; Moura, R.F.; Alves, M.A.Z.; Beck, A.C.S.; Carro, L. A compiler for automatic selection of suitable processing-in-memory instructions. In Proceedings of the Design, Automation Test in Europe Conference Exhibition (DATE), Florence, Italy, 25–29 March 2019; pp. 564–569. [Google Scholar] [CrossRef]
- Corda, S.; Singh, G.; Awan, A.J.; Jordans, R.; Corporaal, H. Platform independent software analysis for near memory computing. In Proceedings of the 22nd Euromicro Conference on Digital System Design (DSD), Kallithea, Greece, 28–30 August 2019; pp. 606–609. [Google Scholar] [CrossRef] [Green Version]
- Pattnaik, A.; Tang, X.; Kayiran, O.; Jog, A.; Mishra, A.; Kandemir, M.T.; Sivasubramaniam, A.; Das, C.R. Opportunistic computing in GPU architectures. In Proceedings of the ACM/IEEE 46th Annual International Symposium on Computer Architecture (ISCA), Phoenix, AZ, USA, 22–26 June 2019; pp. 210–223. [Google Scholar] [CrossRef]
- Asghari-Moghaddam, H.; Son, Y.H.; Ahn, J.H.; Kim, N.S. Chameleon: Versatile and practical near-DRAM acceleration architecture for large memory systems. In Proceedings of the 49th Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Taipei, Taiwan, 15–19 October 2016; pp. 1–13. [Google Scholar] [CrossRef]
- Sura, Z.; O’Brien, K.; Nair, R.; Jacob, A.; Chen, T.; Rosenburg, B.; Sallenave, O.; Bertolli, C.; Antao, S.; Brunheroto, J.; et al. Data access optimization in a processing-in-memory system. In Proceedings of the 12th ACM International Conference on Computing Frontiers (CF), Ischia, Italy, 18–21 May 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Xiao, Y.; Nazarian, S.; Bogdan, P. Prometheus: Processing-in-memory heterogeneous architecture design from a multi-layer network theoretic strategy. In Proceedings of the Design, Automation Test in Europe Conference Exhibition (DATE), Dresden, Germany, 19–23 March 2018; pp. 1387–1392. [Google Scholar] [CrossRef]
- Ahn, J.; Hong, S.; Yoo, S.; Mutlu, O.; Choi, K. A scalable processing-in-memory accelerator for parallel graph processing. In Proceedings of the ACM/IEEE 42nd Annual International Symposium on Computer Architecture (ISCA), Portland, OR, USA, 13–17 June 2015; pp. 105–117. [Google Scholar] [CrossRef]
- Pouchet, L.-N.; Yuki, T. PolyBench/C 4.1. SourceForge. Available online: http://polybench.sourceforge.net/ (accessed on 12 August 2020).
- Kim, Y.; Song, Y.H. Analysis of thermal behavior for 3D integration of DRAM. In Proceedings of the 18th IEEE International Symposium on Consumer Electronics (ISCE), JeJu Island, Korea, 22–25 June 2014; pp. 1–2. [Google Scholar] [CrossRef]
- Ipek, E.; Mutlu, O.; Martínez, J.F.; Caruana, R. Self-Optimizing Memory Controllers: A Reinforcement Learning Approach. In Proceedings of the International Symposium on Computer Architecture, Beijing, China, 21–25 June 2008; pp. 39–50. [Google Scholar] [CrossRef] [Green Version]
- Santos, P.C.; de Lima, J.P.C.; de Moura, R.F.; Ahmed, H.; Alves, M.A.Z.; Beck, A.C.S.; Carro, L. Exploring IoT platform with technologically agnostic processing-in-memory framework. In Proceedings of the Workshop on INTelligent Embedded Systems Architectures and Applications (INTESA), Turin, Italy, 4 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Xiao, Y.; Xue, Y.; Nazarian, S.; Bogdan, P. A load balancing inspired optimization framework for exascale multicore systems: A complex networks approach. In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD), 13–16 November 2017; pp. 217–224. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Management Method | Objectives | Architecture | Offload Granularity | Work (Year) |
|---|---|---|---|---|
| Code Annotation | E | NMP | Instruction | [91] (2014) |
| P | NMP | Group of instructions | [31] (2017) | |
| PIM | Instruction | [13] (1995); [24] (2016); [25] (2017) | ||
| P/E | NMP | Instruction | [28] (2015); [32,37] (2017); [40,57] (2018) | |
| Group of instructions | [75] (2014); [95] (2016) | |||
| PIM | Instruction | [16] (2013); [19] (2016); [1] (2017) | ||
| Compiler | P | NMP | Instruction | [42] (2017); [92] (2019) |
| Group of instructions | [96] (2015); [70] (2017) | |||
| P/E | NMP | Instruction | [40] (2018); [39] (2019) | |
| Thread | [27] (2016) | |||
| Online Heuristic | P | NMP | Thread | [71] (2018) |
| P/E | NMP | Instruction | [28] (2015) | |
| Group of instructions | [72] (2020) | |||
| Thread | [27] (2016); [74] (2019) | |||
| Application | [26] (2016) | |||
| Pow/P/E | NMP | Application | [38] (2020) | |
| T | NMP | Instruction | [29] (2018) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, K.; Pasricha, S.; Kim, R.G. A Survey of Resource Management for Processing-In-Memory and Near-Memory Processing Architectures. J. Low Power Electron. Appl. 2020, 10, 30. https://doi.org/10.3390/jlpea10040030
Khan K, Pasricha S, Kim RG. A Survey of Resource Management for Processing-In-Memory and Near-Memory Processing Architectures. Journal of Low Power Electronics and Applications. 2020; 10(4):30. https://doi.org/10.3390/jlpea10040030
Chicago/Turabian StyleKhan, Kamil, Sudeep Pasricha, and Ryan Gary Kim. 2020. "A Survey of Resource Management for Processing-In-Memory and Near-Memory Processing Architectures" Journal of Low Power Electronics and Applications 10, no. 4: 30. https://doi.org/10.3390/jlpea10040030
APA StyleKhan, K., Pasricha, S., & Kim, R. G. (2020). A Survey of Resource Management for Processing-In-Memory and Near-Memory Processing Architectures. Journal of Low Power Electronics and Applications, 10(4), 30. https://doi.org/10.3390/jlpea10040030