
A gm/ID-Based Design Strategy for IoT and Ultra-Low-Power OTAs with Fast-Settling and Large Capacitive Loads



Abstract
:1. Introduction
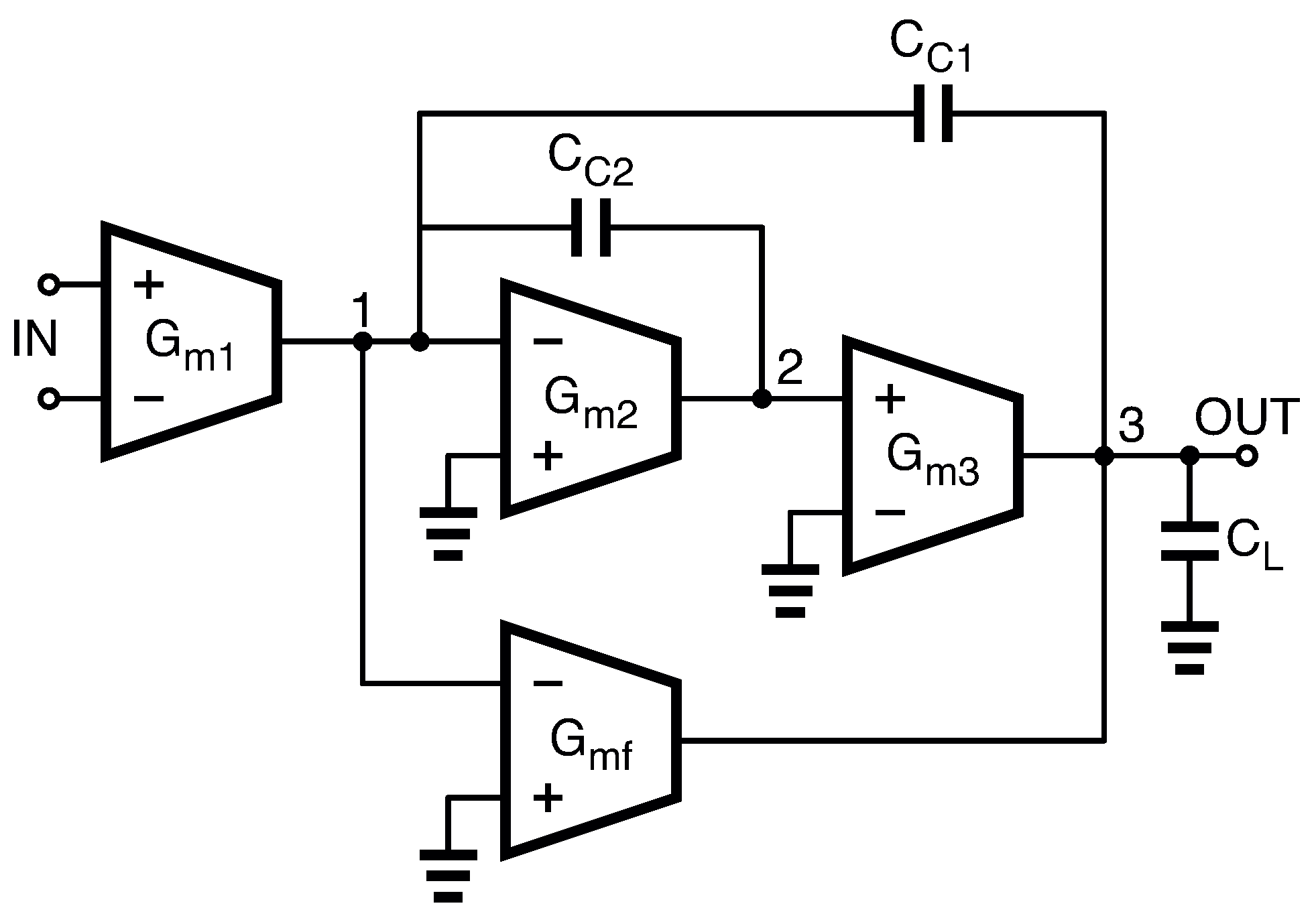
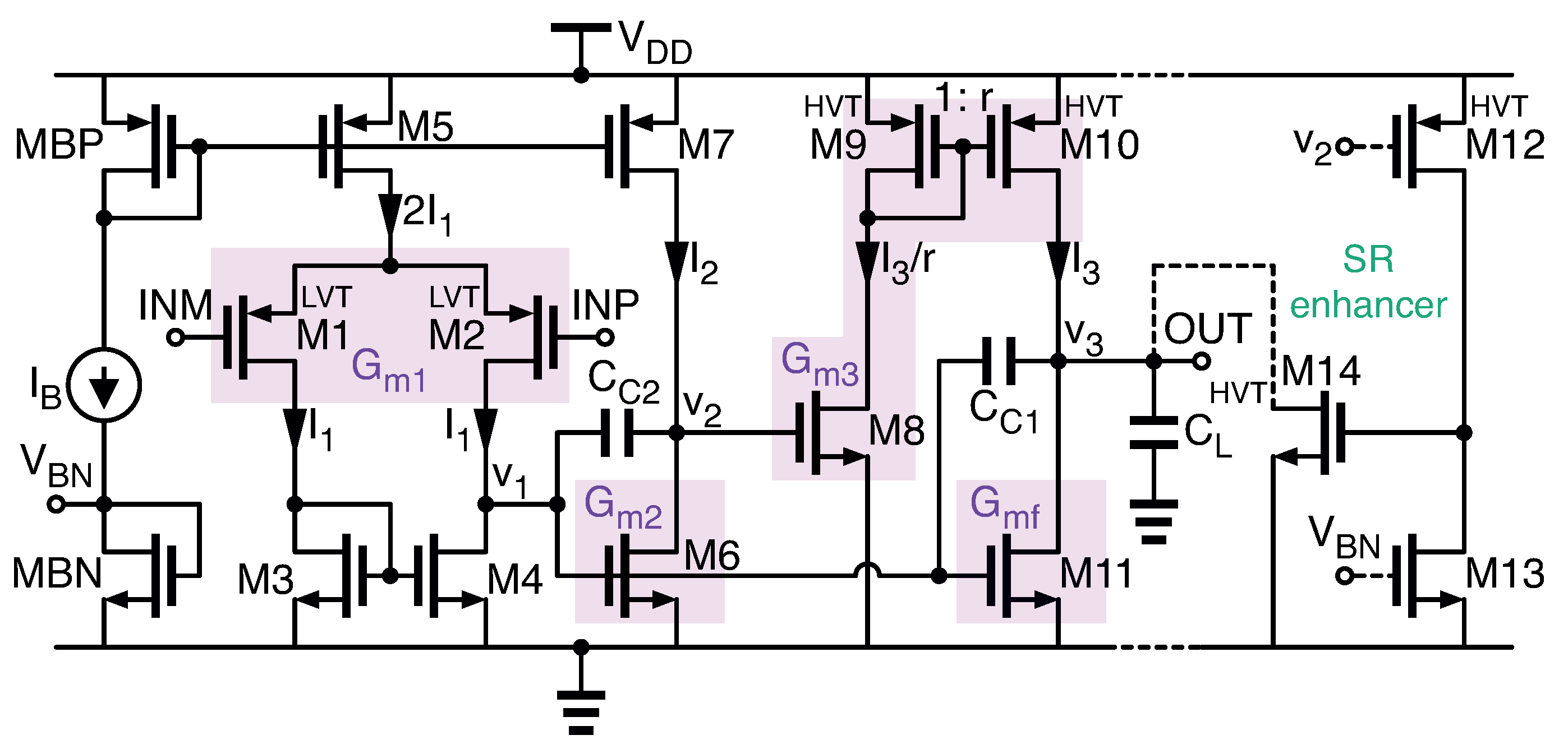
2. The Three-Stage OTA
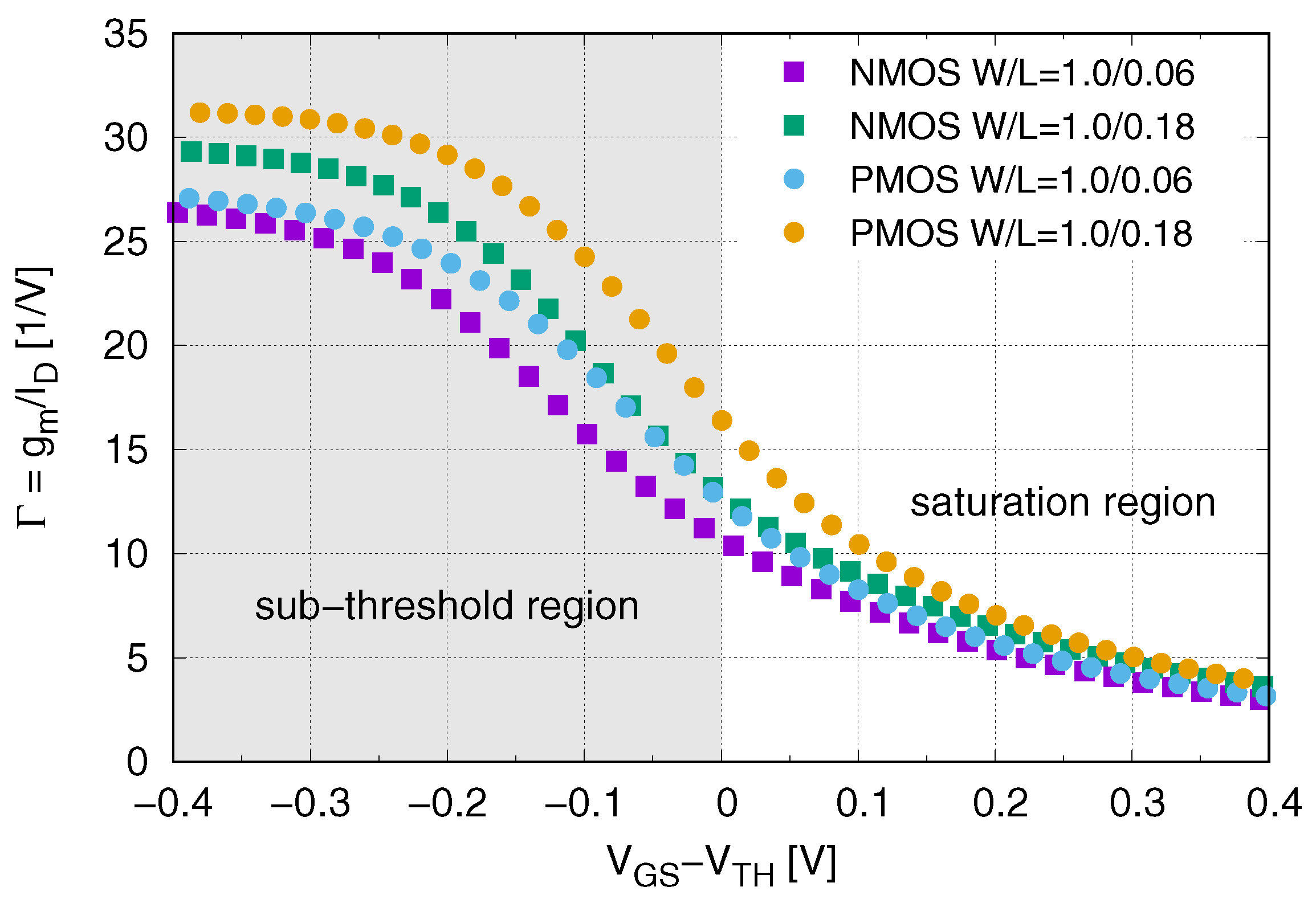
3. Design Strategy of the Three-Stage OTA for Sub-Threshold Region
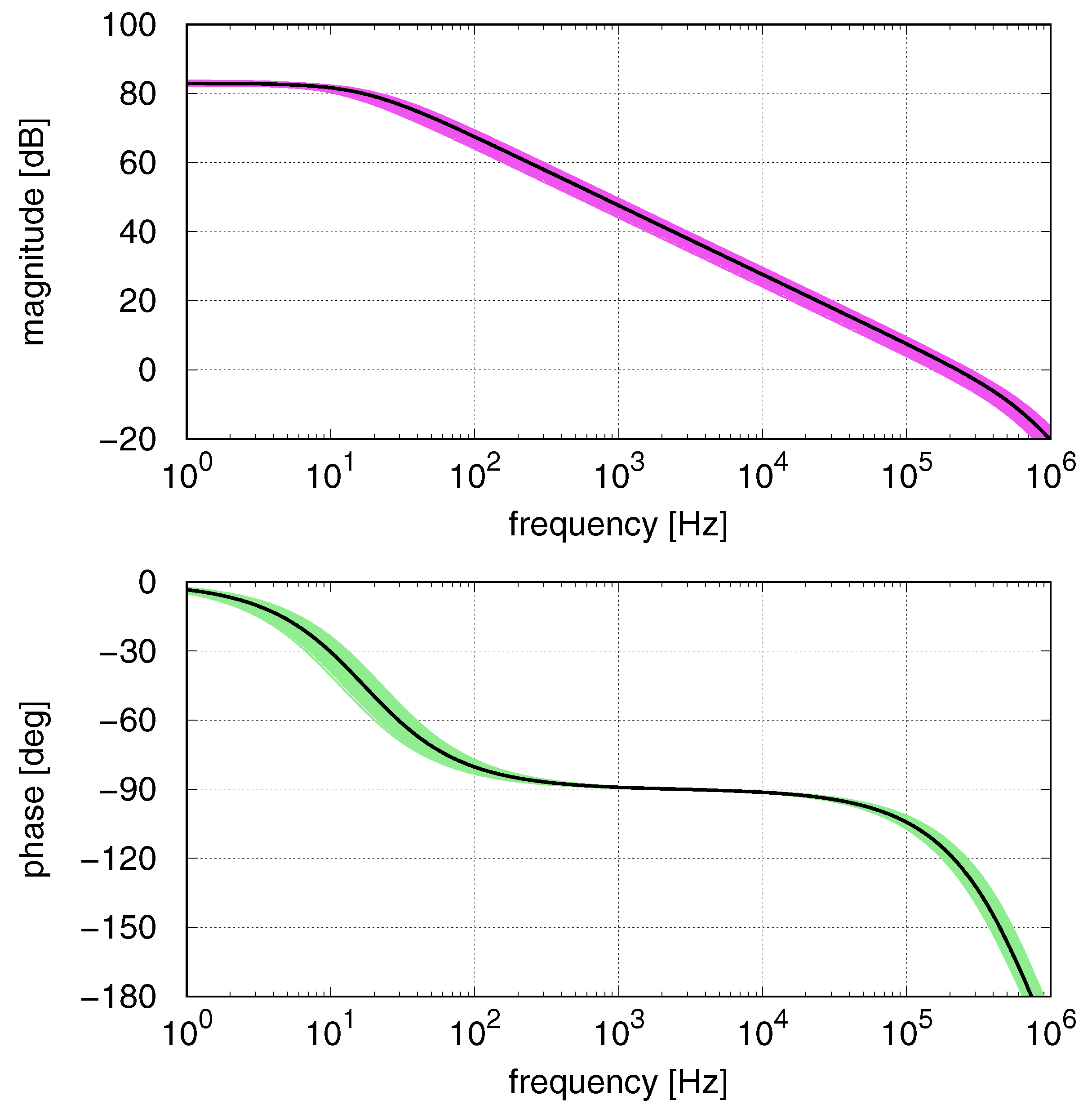
3.1. Small-Signal Analysis and Stability Requirements
3.2. Settling Time, Slew Rate and Gain–Bandwidth Product
3.3. Noise Analysis and First-Stage Transconductance
3.4. Gain–Bandwidth Product and Current Dissipation
3.5. The Design Procedure in the Sub-Threshold Region
4. OTA Design and Validation Results
Comparison with Other Recent Sub 1-V Amplifiers
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. MatLab Code of the Proposed Design Procedure

References
- Alioto, M. (Ed.) Enabling the Internet of Things: From Integrated Circuits to Integrated Systems; Springer: Berlin/Heisenberg, Germany, 2017. [Google Scholar] [CrossRef]
- Jang, T.; Kim, G.; Kempke, B.; Henry, M.B.; Chiotellis, N.; Pfeiffer, C.; Kim, D.; Kim, Y.; Foo, Z.; Kim, H.; et al. Circuit and System Designs of Ultra-Low Power Sensor Nodes With Illustration in a Miniaturized GNSS Logger for Position Tracking: Part I—Analog Circuit Techniques. IEEE Trans. Circuits Syst. I 2017, 64, 2237–2249. [Google Scholar] [CrossRef]
- Jang, T.; Kim, G.; Kempke, B.; Henry, M.B.; Chiotellis, N.; Pfeiffer, C.; Kim, D.; Kim, Y.; Foo, Z.; Kim, H.; et al. Circuit and System Designs of Ultra-Low Power Sensor Nodes With Illustration in a Miniaturized GNSS Logger for Position Tracking: Part II—Data Communication, Energy Harvesting, Power Management, and Digital Circuits. IEEE Trans. Circuits Syst. I 2017, 64, 2250–2262. [Google Scholar] [CrossRef]
- Tse, K.; Ho, B.; Chung, H.H.; Hui, S. A comparative study of maximum-power-point trackers for photovoltaic panels using switching-frequency modulation scheme. IEEE Trans. Ind. Electron. 2004, 51, 410–418. [Google Scholar] [CrossRef]
- Pulvirenti, F.; La Scala, A.; Ragonese, D.; D’Souza, K.; Tina, G.M.; Pennisi, S. 4-Phase Interleaved Boost Converter With IC Controller for Distributed Photovoltaic Systems. IEEE Trans. Circuits Syst. I 2013, 60, 3090–3102. [Google Scholar] [CrossRef]
- Abella, C.S.; Bonina, S.; Cucuccio, A.; D’Angelo, S.; Giustolisi, G.; Grasso, A.D.; Imbruglia, A.; Mauro, G.S.; Nastasi, G.A.; Palumbo, G.; et al. Autonomous Energy-efficient Wireless Sensor Network Platform for Home/Office Automation. IEEE Sens. J. 2019, 19, 3501–3512. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. Dynamic-biased capacitor-free NMOS LDO. IET Electron. Lett. 2009, 45, 1140–1141. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G.; Spitale, E. A 50-mA 1-nF Low-Voltage Low-Dropout Voltage Regulator for SoC Applications. ETRI J. 2010, 32, 520–529. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G.; Spitale, E. Robust Miller Compensation with Current Amplifiers Applied to LDO Voltage Regulators. IEEE Trans. Circuits Syst. I 2012, 59, 1880–1893. [Google Scholar] [CrossRef]
- Grasso, A.D.; Pennisi, S. Micro-scale inductorless maximum power point tracking DC–DC converter. IET Power Electron. 2013, 6, 1634–1639. [Google Scholar] [CrossRef]
- Leung, K.N.; Mok, P.K.T.; Ki, W.H.; Sin, J.K.O. Three-Stage Large Capacitive Load Amplifier with Damping-Factor-Control Frequency Compensation. IEEE J. Solid State Circuits 2000, 35, 221–230. [Google Scholar] [CrossRef]
- Peng, X.; Sansen, W.; Hou, L.; Wang, J.; Wu, W. Impedance Adapting Compensation for Low-Power Multistage Amplifiers. IEEE J. Solid State Circuits 2011, 46, 445–451. [Google Scholar] [CrossRef]
- Taherzadeh-Sani, M.; Hamoui, A.A. A 1-V Process-Insensitive Current-Scalable Two-Stage Opamp With Enhanced DC Gain and Settling Behavior in 65-nm Digital CMOS. IEEE J. Solid State Circuits 2011, 46, 660–668. [Google Scholar] [CrossRef]
- Yan, Z.; Mak, P.-I.; Law, M.-K.; Martins, R.P. A 0.016-mm2 144-μW Three-Stage Amplifier Capable of Driving 1-to-15 nF Capacitive Load With >0.95-MHz GBW. IEEE J. Solid State Circuits 2013, 48, 527–540. [Google Scholar] [CrossRef]
- Tan, M.; Ki, W.-H. A Cascode Miller-Compensated Three-Stage Amplifier With Local Impedance Attenuation for Optimized Complex-Pole Control. IEEE J. Solid State Circuits 2015, 50, 440–449. [Google Scholar] [CrossRef]
- Centurelli, F.; Monsurrò, P.; Parisi, G.; Tommasino, P.; Trifiletti, A. A Topology of Fully Differential Class-AB Symmetrical OTA With Improved CMRR. IEEE Trans. Circuits Syst. II 2018, 65, 1504–1508. [Google Scholar] [CrossRef]
- Centurelli, F.; Monsurrò, P.; Parisi, G.; Tommasino, P.; Trifiletti, A. A 0.6 V class-AB rail-to-rail CMOS OTA VDD exploiting threshold lowering. IET Electron. Lett. 2018, 54, 930–932. [Google Scholar] [CrossRef]
- Cellucci, D.; Centurelli, F.; Di Stefano, V.; Monsurrò, P.; Pennisi, S.; Scotti, G.; Trifiletti, A. 0.6-V CMOS cascode OTA with complementary gate-driven gain-boosting and forward body bias. Int. J. Circ. Theor. Appl. 2020, 48, 15–27. [Google Scholar] [CrossRef]
- Blalock, B.J.; Allen, P.E.; Rincon-Mora, G.A. Designing 1-V op amps using standard digital CMOS technology. IEEE Trans. Circuits Syst. II 1998, 45, 769–780. [Google Scholar] [CrossRef] [Green Version]
- Stockstad, T.; Yoshizawa, H. A 0.9-V 0.5-μA rail-to-rail CMOS operational amplifier. IEEE J. Solid State Circuits 2002, 37, 286–292. [Google Scholar] [CrossRef]
- Ferreira, L.H.C.; Pimenta, T.C.; Moreno, R.L. An Ultra-Low-Voltage Ultra-Low-Power CMOS Miller OTA With Rail-to-Rail Input/Output Swing. IEEE Trans. Circuits Syst. II 2007, 54, 843–847. [Google Scholar] [CrossRef]
- Zuo, L.; Islam, S.K. Low-Voltage Bulk-Driven Operational Amplifier With Improved Transconductance. IEEE Trans. Circuits Syst. I 2013, 60, 2084–2091. [Google Scholar] [CrossRef]
- Lee, S.Y.; Wang, C.P.; Chu, Y.S. Low-Voltage OTA–C Filter With an Area- and Power-Efficient OTA for Biosignal Sensor Applications. IEEE Trans. Biomed. Eng. 2019, 13, 56–67. [Google Scholar] [CrossRef]
- Kinget, P.R. Device Mismatch and Tradeoffs in the Design of Analog Circuits. IEEE J. Solid State Circuits 2005, 40, 1212–1224. [Google Scholar] [CrossRef]
- Sansen, W. Minimum Power in Analog Amplifying Blocks: Presenting a Design Procedure. IEEE Solid State Circuits Mag. 2015, 7, 83–89. [Google Scholar] [CrossRef]
- Cabrera-Bernal, E.; Pennisi, S.; Grasso, A.D.; Torralba, A.; Gonzalez Carvajal, R. 0.7-V Three-Stage Class-AB CMOS Operational Transconductance Amplifier. IEEE Trans. Circuits Syst. I 2016, 63, 1807–1815. [Google Scholar] [CrossRef]
- Grasso, A.D.; Pennisi, S.; Scotti, G.; Trifiletti, A. 0.9-V Class-AB Miller OTA in 0.35- μm CMOS With Threshold-Lowered Non-Tailed Differential Pair. IEEE Trans. Circuits Syst. I 2017, 64, 1740–1747. [Google Scholar] [CrossRef]
- Kulej, T.; Khateb, F. A 0.3-V 98-dB Rail-to-Rail OTA in 0.18 μm CMOS. IEEE Access 2020, 8, 27459–27467. [Google Scholar] [CrossRef]
- Woo, K.C.; Yang, B.D. A 0.25-V Rail-to-Rail Three-Stage OTA With an Enhanced DC Gain. IEEE Trans. Circuits Syst. II 2020, 67, 1179–1183. [Google Scholar] [CrossRef]
- Jakusz, J.; Jendernalik, W.; Blakiewicz, G.; Kłosowski, M.; Szczepański, S. A 1-nS 1-V Sub-1-μW Linear CMOS OTA with Rail-to-Rail Input for Hz-Band Sensory Interfaces. Sensors 2020, 20, 3303. [Google Scholar] [CrossRef]
- Rodovalho, L.H.; Aiello, O.; Rodrigues, C.R. Ultra-Low-Voltage Inverter-Based Operational Transconductance Amplifiers with Voltage Gain Enhancement by Improved Composite Transistors. Electronics 2020, 9, 1410. [Google Scholar] [CrossRef]
- Manfredini, G.; Catania, A.; Benvenuti, L.; Cicalini, M.; Piotto, M.; Bruschi, P. Ultra-Low-Voltage Inverter-Based Amplifier with Novel Common-Mode Stabilization Loop. Electronics 2020, 9, 1019. [Google Scholar] [CrossRef]
- Toledo, P.; Crovetti, P.; Aiello, O.; Alioto, M. Fully Digital Rail-to-Rail OTA With Sub-1000-μm2 Area, 250-mV Minimum Supply, and nW Power at 150-pF Load in 180 nm. IEEE Solid State Circuits Lett. 2020, 3, 474–477. [Google Scholar] [CrossRef]
- Rodovalho, L.H.; Ramos Rodrigues, C.; Aiello, O. Self-Biased and Supply-Voltage Scalable Inverter-Based Operational Transconductance Amplifier with Improved Composite Transistors. Electronics 2021, 10, 935. [Google Scholar] [CrossRef]
- Centurelli, F.; Della Sala, R.; Monsurrò, P.; Scotti, G.; Trifiletti, A. A 0.3 V Rail-to-Rail Ultra-Low-Power OTA with Improved Bandwidth and Slew Rate. J. Low Power Electron. Appl. 2021, 11, 19. [Google Scholar] [CrossRef]
- Centurelli, F.; Della Sala, R.; Scotti, G.; Trifiletti, A. A 0.3 V, Rail-to-Rail, Ultralow-Power, Non-Tailed, Body-Driven, Sub-Threshold Amplifier. Appl. Sci. 2021, 11, 2528. [Google Scholar] [CrossRef]
- Pugliese, A.; Cappuccino, G.; Cocorullo, G. Nested Miller compensation capacitor sizing rules for fast-settling amplifier design. IET Electron. Lett. 2005, 41, 573–575. [Google Scholar] [CrossRef]
- Pugliese, A.; Amoroso, F.A.; Cappuccino, G.; Cocorullo, G. Settling time optimisation for two-stage CMOS amplifiers with current-buffer Miller compensation. IET Electron. Lett. 2007, 43, 1257–1258. [Google Scholar] [CrossRef]
- Pugliese, A.; Cappuccino, G.; Cocorullo, G. Design Procedure for Settling Time Minimization in Three-Stage Nested-Miller Amplifiers. IEEE Trans. Circuits Syst. II 2008, 55, 1–5. [Google Scholar] [CrossRef]
- Pugliese, A.; Amoroso, F.A.; Cappuccino, G.; Cocorullo, G. Settling Time Optimization for Three-Stage CMOS Amplifier Topologies. IEEE Trans. Circuits Syst. I 2009, 56, 2569–2582. [Google Scholar] [CrossRef]
- Nguyen, R.; Murmann, B. The Design of Fast-Settling Three-Stage Amplifiers Using the Open-Loop Damping Factor as a Design Parameter. IEEE Trans. Circuits Syst. I 2010, 57, 1244–1254. [Google Scholar] [CrossRef]
- Yang, Y.; Binkley, D.M.; Li, C. Using Moderate Inversion to Optimize Voltage Gain, Thermal Noise, and Settling Time in Two-stage CMOS Amplifiers. In Proceedings of the IEEE ISCAS 2012, Seoul, Korea, 20–23 May 2012; pp. 432–435. [Google Scholar] [CrossRef]
- Seth, S.; Murmann, B. Settling Time and Noise Optimization of a Three-Stage Operational Transconductance Amplifier. IEEE Trans. Circuits Syst. I 2013, 60, 1168–1174. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. Compensation strategy for high-speed three-stage switched-capacitor amplifiers. IET Electron. Lett. 2016, 52, 1202–1204. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. Robust design of CMOS amplifiers oriented to datasettime specification. Int. J. Circ. Theor. Appl. 2017, 45, 1329–1348. [Google Scholar] [CrossRef]
- Prasopsin, P.; Wattanapanitch, W. A Sub-Microwatt Class-AB Super Buffer: Frequency Compensation for datasetTime Improvement. IEEE Trans. Circuits Syst. II 2018, 65, 26–30. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. Bessel-like compensation of three-stage operational transconductance amplifiers. Int. J. Circ. Theor. Appl. 2018, 46, 729–747. [Google Scholar] [CrossRef]
- Lavalle-Aviles, F.; Torres, J.; Sánchez-Sinencio, E. A High Power Supply Rejection and Fast Settling Time Capacitor-Less LDO. IEEE Trans. Power Electron. 2019, 34, 474–484. [Google Scholar] [CrossRef]
- Mandal, D.; Desai, C.; Bakkaloglu, B.; Kiaei, S. Adaptively Biased Output Cap-Less NMOS LDO With 19 ns Settling Time. IEEE Trans. Circuits Syst. II 2019, 66, 167–171. [Google Scholar] [CrossRef]
- Grasso, A.D.; Palumbo, G.; Pennisi, S. Analytical comparison of frequency compensation techniques in three-stage amplifiers. Int. J. Circ. Theor. Appl. 2008, 36, 53–80. [Google Scholar] [CrossRef]
- Grasso, A.D.; Marano, D.; Palumbo, G.; Pennisi, S. Analytical comparison of reversed nested Miller frequency compensation techniques. Int. J. Circ. Theor. Appl. 2010, 38, 709–737. [Google Scholar] [CrossRef]
- Silveira, F.; Flandre, D.; Jespers, P.G.A. A gm/ID based methodology for the design of CMOS analog circuits and its application to the synthesis of a silicon-on-insulator micropower OTA. IEEE J. Solid State Circuits 1996, 31, 1314–1319. [Google Scholar] [CrossRef]
- Flandre, D.; Viviani, A.; Eggermont, J.P.; Gentinne, B.; Jespers, P.G.A. Improved synthesis of gain-boosted regulated-cascode CMOS stages using symbolic analysis and gm/ID methodology. IEEE J. Solid State Circuits 1997, 32, 1006–1012. [Google Scholar] [CrossRef]
- Jespers, P.G.A.; Murmann, B. Systematic Design of Analog CMOS Circuits Using Pre-Computed Lookup Tables; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar] [CrossRef]
- Murmann, B. gm/ID Starter Kit. Available online: https://web.stanford.edu/~murmann/gmid (accessed on 11 May 2021).
- Sabry, M.N.; Omran, H.; Dessouky, M. Systematic design and optimization of operational transconductance amplifier using gm/ID design methodology. Microelectron. J. 2018, 75, 87–96. [Google Scholar] [CrossRef]
- Aminzadeh, H. Systematic circuit design and analysis using generalised gm/ID functions of MOS devices. IET Circuits Devices Syst. 2020, 14, 432–443. [Google Scholar] [CrossRef]
- Youssef, A.A.; Murmann, B.; Omran, H. Analog IC Design Using Precomputed Lookup Tables: Challenges and Solutions. IEEE Access 2020, 8, 134640–134652. [Google Scholar] [CrossRef]
- Kinget, P.R. Scaling analog circuits into deep nanoscale CMOS: Obstacles and ways to overcome them. In Proceedings of the IEEE CICC 2015, San Jose, CA, USA, 28–30 September 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. Design of Three-Stage OTA Based on datasetTime Requirements Including Large and Small Signal Behavior. IEEE Trans. Circuits Syst. I 2021, 68, 998–1011. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. Design of CMOS three-stage amplifiers for near-to-minimum datasettime. Microelectron. J. 2021, 107. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. Efficient Design Strategy for Optimizing the Settling Time in Three-Stage Amplifiers Including Small- and Large-Signal Behavior. Electronics 2021, 10, 612. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. In-depth Analysis of Pole-Zero Compensations in CMOS Operational Transconductance Amplifiers. IEEE Trans. Circuits Syst. I 2019, 66, 4557–4570. [Google Scholar] [CrossRef]
- Yavari, M.; Maghari, N.; Shoaei, O. An Accurate Analysis of Slew Rate for Two-Stage CMOS Opamps. IEEE Trans. Circuits Syst. II 2005, 52, 164–167. [Google Scholar] [CrossRef]
- Marano, D.; Palumbo, G.; Pennisi, S. Step-response optimisation techniques for low-power, high-load, three-stage operational amplifiers driving large capacitive loads. IET Circuits Devices Syst. 2010, 4, 87–98. [Google Scholar] [CrossRef]
- Grasso, A.D.; Palumbo, G.; Pennisi, S. High-Performance Four-Stage CMOS OTA Suitable for Large Capacitive Loads. IEEE Trans. Circuits Syst. I 2015, 62, 2476–2484. [Google Scholar] [CrossRef]
- Grasso, A.D.; Marano, D.; Palumbo, G.; Pennisi, S. Design Methodology of Subthreshold Three-Stage CMOS OTAs Suitable for Ultra-Low-Power Low-Area and High Driving Capability. IEEE Trans. Circuits Syst. I 2015, 62, 1453–1462. [Google Scholar] [CrossRef]
- Grasso, A.D.; Marano, D.; Palumbo, G.; Pennisi, S. High-Performance Three-Stage Single-Miller CMOS OTA With No Upper Limit of CL. IEEE Trans. Circuits Syst. II 2018, 65, 1529–1533. [Google Scholar] [CrossRef]
- Giustolisi, G.; Grasso, A.D.; Pennisi, S. High-Drive and Linear CMOS Class-AB Pseudo-Differential Amplifier. IEEE Trans. Circuits Syst. II 2007, 54, 112–116. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G. Three-Stage Dynamic-Biased CMOS Amplifier With a Robust Optimization of the Settling Time. IEEE Trans. Circuits Syst. I 2015, 62, 2641–2651. [Google Scholar] [CrossRef]
- Giustolisi, G.; Palumbo, G.; Pennisi, S. Class-AB CMOS output stages suitable for low-voltage amplifiers in nanometer technologies. Microelectron. J. 2019, 92, 104597. [Google Scholar] [CrossRef]
- Master Micro Analog IC Design. Available online: http://www.master-micro.com/mastering-microelectronics/courses/analog-ic-design (accessed on 11 May 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 132 nA | |
| 779 nA | |
| 865 nA | |
| Transistor | Aspect Ratio |
|---|---|
| M1 *, M2 * | |
| M3, M4 | |
| M5 | |
| M6 | |
| M7 | |
| M8 | |
| M9 | |
| M10 | |
| M11 | |
| M12 | |
| M13 | |
| M14 | |
| MBN | |
| MBP |
| [26] | [27] | [28] | [29] | This Work | |
|---|---|---|---|---|---|
| Tech | 180 nm | 350 nm | 180 nm | 65 nm | 65 nm |
| Year | 2016 | 2017 | 2020 | 2020 | 2021 |
| Input-driven | Bulk | Gate | Bulk | Bulk | Gate |
| (V) | 0.7 | 0.9 | 0.3 | 0.25 | 1.0 |
| (A) | 36.3 | 27.0 | 0.043 | 0.104 | 2.12 |
| Power (W) | 25.4 | 24.3 | 0.013 | 0.026 | 2.12 |
| (pF) | 20 | 10 | 30 | 15 | 100 |
| (kHz) | 3000 | 1000 | 3.1 | 9.5 | 253 |
| IFOM | 1653 | 370 | 2146 | 1370 | 11,934 |
| FOM | 2361 | 412 | 7154 | 5481 | 11,934 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giustolisi, G.; Palumbo, G. A gm/ID-Based Design Strategy for IoT and Ultra-Low-Power OTAs with Fast-Settling and Large Capacitive Loads. J. Low Power Electron. Appl. 2021, 11, 21. https://doi.org/10.3390/jlpea11020021
Giustolisi G, Palumbo G. A gm/ID-Based Design Strategy for IoT and Ultra-Low-Power OTAs with Fast-Settling and Large Capacitive Loads. Journal of Low Power Electronics and Applications. 2021; 11(2):21. https://doi.org/10.3390/jlpea11020021
Chicago/Turabian StyleGiustolisi, Gianluca, and Gaetano Palumbo. 2021. "A gm/ID-Based Design Strategy for IoT and Ultra-Low-Power OTAs with Fast-Settling and Large Capacitive Loads" Journal of Low Power Electronics and Applications 11, no. 2: 21. https://doi.org/10.3390/jlpea11020021
APA StyleGiustolisi, G., & Palumbo, G. (2021). A gm/ID-Based Design Strategy for IoT and Ultra-Low-Power OTAs with Fast-Settling and Large Capacitive Loads. Journal of Low Power Electronics and Applications, 11(2), 21. https://doi.org/10.3390/jlpea11020021