
Quantized Cooperative Spectrum Sensing in Bandwidth-Constrained Cognitive V2X Based on Deep Learning


Abstract
:1. Introduction
- (1)
- (2)
- Based on the SoftCombinationNet proposed in [16], we study how many bits should be reported in QBCSS to achieve detection performance close to that of spectrum sensing with raw sensing results. Through simulation results, we conclude that only four bits of QBCSS are needed to achieve the optimal detection performance.
- (3)
- According to the conclusion drawn in (2), considering the bandwidth-constrained CCH in CR-V2X, we propose a bandwidth-constrained QBCSS scheme to make full use of the CCH with limited capacity to achieve the best detection performance.
2. System Model
3. Single-User Spectrum Sensing Based on Modified-ResNeXt in CR-V2Xs
3.1. Network Architecture
3.2. Dataset Generation
3.3. Simulation Results
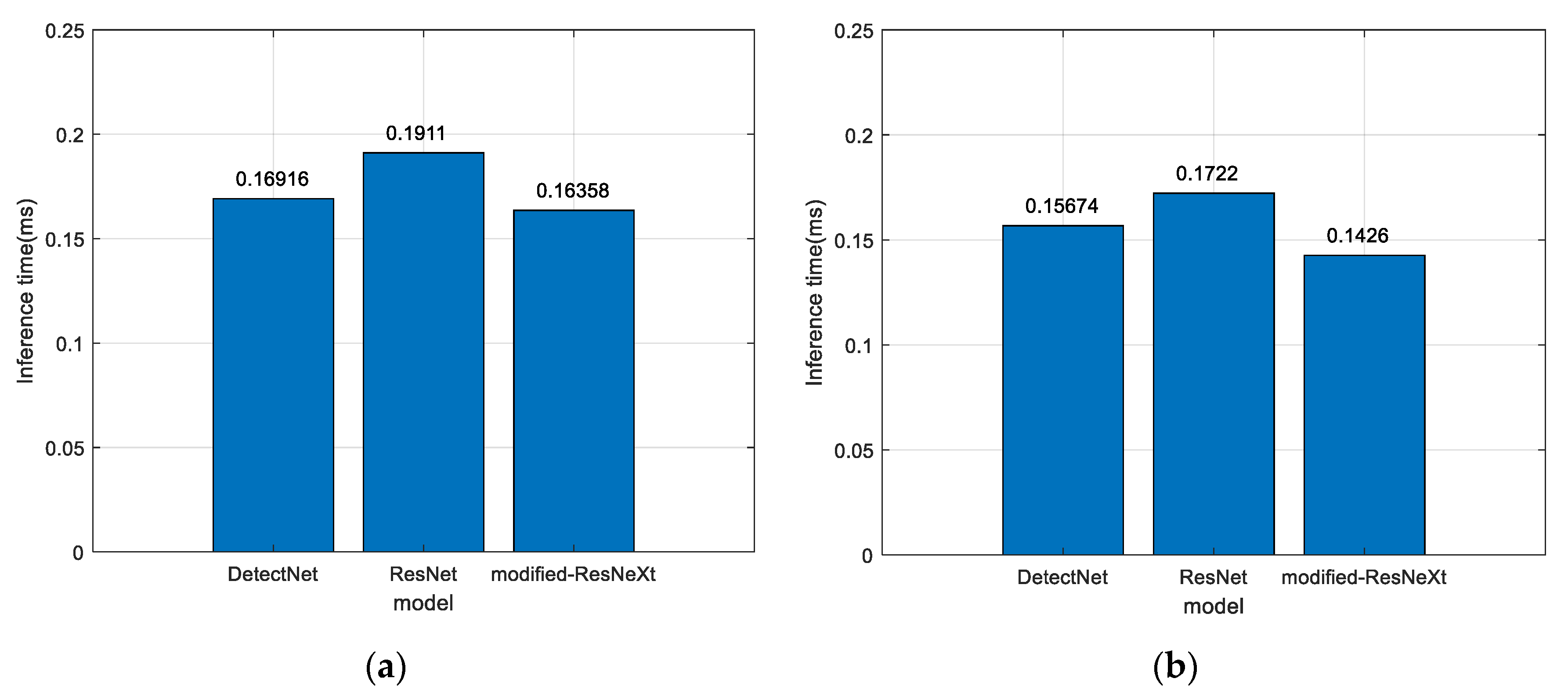
3.3.1. Comparison with Different Models
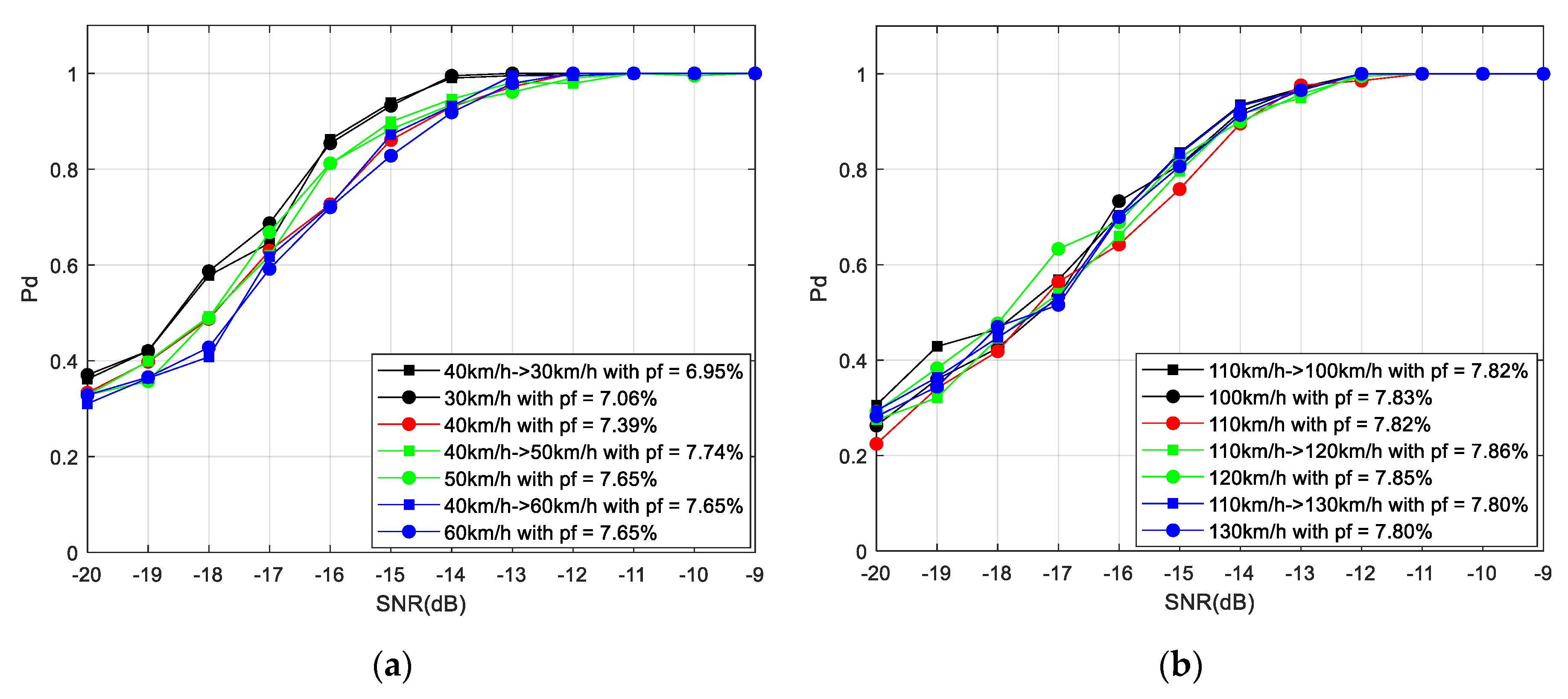
3.3.2. Impact of Vehicle Velocity
4. Quantized Cooperative Spectrum Sensing Based on Deep Learning
4.1. Quantized Collaboration Scheme Based on Deep Learning
4.1.1. Quantification Process
4.1.2. Simulation Results and Discussions
4.2. Bandwidth-Constrained Quantized Collaboration Scheme Based on Deep Learning
| Algorithm 1 Enumeration method to find {b,m} |
| Initialize , for do if for do if if ? then End if End if End for End if End for |
| Algorithm 2 QBCSS in bandwidth-constrained CR-V2Xs based on DL |
| 01: The FC confirms the capacity of the CCH and the number of vehicles that can participate in CSS 02: The FC select the optimal solution from the database based on the information obtained in the first step 03: The FC notifies vehicles that need to participate in CSS based on the location of the vehicle 04: The notified vehicle performs local spectrum sensing 05: The cognitive vehicles upload the quantified local spectrum sensing results to the FC 06: The FC dequantizes the received quantitative information to restore the class score vector 07: The FC makes the final decision |
4.3. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Singh, K.D.; Rawat, P.; Bonnin, J. Cognitive radio for vehicular ad hoc networks (CR-V2Xs): Approaches and challenges. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 49. [Google Scholar] [CrossRef] [Green Version]
- Chembe, C.; Noor, R.M.; Ahmedy, I.; Oche, M.; Kunda, D.; Liu, C.H. Spectrum sensing in cognitive vehicular network: State-of-Art, challenges and open issues. Comput. Commun. 2017, 97, 15–30. [Google Scholar] [CrossRef]
- Yucek, T.; Arslan, H. A survey of spectrum sensing algorithms for cognitive radio applications. IEEE Commun. Surv. Tutor. 2009, 11, 116–130. [Google Scholar] [CrossRef]
- Felice, M.D.; Doost-Mohammady, R.; Chowdhury, K.R.; Bononi, L. Smart radios for smart vehicles: Cognitive vehicular networks. IEEE Veh. Technol. Mag. 2012, 7, 26–33. [Google Scholar] [CrossRef]
- Qian, X.; Hao, L. Spectrum Sensing with Energy Detection in Cognitive Vehicular ad hoc Networks. In Proceedings of the 2014 IEEE 6th International Symposium on Wireless Vehicular Communications, Vancouver, BC, Canada, 14–15 September 2014; pp. 1–5. [Google Scholar]
- Piran, M.J.; Cho, Y.; Yun, J.; Ali, A.; Suh, D.Y. Cognitive radio-based vehicular ad hoc and sensor networks. Int. J. Dist. Sens. Netw. 2014, 2, 4–17. [Google Scholar]
- Urkowitz, H. Energy detection of unknown deterministic signals. Proc. IEEE 1967, 29, 523–531. [Google Scholar] [CrossRef]
- Tandra, R.; Sahai, A. SNR walls for signal detection. IEEE J. Sel. Top. Signal Process. 2008, 2, 4–17. [Google Scholar] [CrossRef] [Green Version]
- Gardner, W.A. Spectral correlation of modulated signals: Part I—Analog modulation. IEEE Trans. Commun. 1987, 35, 584–594. [Google Scholar] [CrossRef]
- Gardner, W.A.; Brown, W.A.; Chen, C.K. Spectral correlation of modulated signals: Part II—Digital modulation. IEEE Trans. Commun. 1987, 35, 595–601. [Google Scholar] [CrossRef]
- Kabeel, A.A.; Hussein, A.H.; Khalaf, A.A.M.; Hamed, H.F.A. A Utilization of multiple antenna elements for matched filter based spectrum sensing performance enhancement in cognitive radio system. AEU Int. J. Electron. Commun. 2019, 107, 98–109. [Google Scholar] [CrossRef]
- Han, D.; Sobabe, G.C.; Zhang, C.; Bai, X.; Wang, Z.; Liu, S.; Guo, B. Spectrum Sensing for Cognitive Radio Based on Convolution Neural Network. In Proceedings of the 2017 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 14–16 October 2017; pp. 1–6. [Google Scholar]
- Liu, C.; Wang, J.; Liua, X.; Liang, Y. Deep CM-CNN for spectrum sensing in cognitive radio. IEEE J. Sel. Areas Commun. 2019, 37, 2306–2321. [Google Scholar] [CrossRef]
- Zheng, S.; Chen, S.; Qi, P.; Zhou, H.; Yang, X. Spectrum sensing based on deep learning classification for cognitive radios. China Commun. Lett. 2020, 17, 138–148. [Google Scholar] [CrossRef]
- West, N.E.; O’Shea, T. Deep Architectures for Modulation Recognition. In Proceedings of the 2017 IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Baltimore, MD, USA, 6–9 March 2017; pp. 1–6. [Google Scholar]
- Gao, J.; Yi, X.; Zhong, C.; Chen, X.; Zhang, Z. Deep learning for spectrum sensing. IEEE Wirel. Commun. Lett. 2019, 8, 1727–1730. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.; Kim, M.; Cho, D.H. Deep cooperative sensing: Cooperative spectrum sensing based on convolutional neural networks. IEEE Trans. Veh. Technol. 2019, 68, 3005–3009. [Google Scholar] [CrossRef]
- Nguyen-Thanh, N.; Ciblat, P.; Maleki, S.; Nguyen, V.-T. How many bits should be reported in quantized cooperative spectrum sensing? IEEE Wirel. Commun. Lett. 2015, 4, 465–468. [Google Scholar] [CrossRef] [Green Version]
- Alghorani, Y.; Kaddoum, G.; Muhaidat, S.; Pierre, S. On the approximate analysis of energy detection over ∗ rayleigh fading channels through cooperative spectrum sensing. IEEE Wirel. Commun. 2015, 4, 413–416. [Google Scholar] [CrossRef] [Green Version]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep learning. arXiv arXiv:1312.6184v5, 2017.
- Xie, S.; Girshick, R.; Dollar, P.; Tu, Z.; He, K. Aggregated Residual Transformations for Deep Neural Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1492–1500. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- 3GPP. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3209 (accessed on 24 June 2019).
- 3GPP. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3173 (accessed on 10 October 2019).
- Giambene, G.; Rahman, M.S.; Vinel, A. Analysis of V2V Sidelink Communications for Platoon Applications. In Proceedings of the ICC 2020–2020 IEEE International Conference on Communication (ICC), Dublin, Ireland, 7–11 June 2020. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Layer |
|---|---|
| 1 | 48, Conv1D, 15, S, F, R |
| 2 | 60, Conv1D, 7, S, F, R |
| 3 | 3, MaxPool1D, 2, S, F |
| 4 | basic modified-ResNeXt module |
| 5 | 32, AvgPool1D, 1, S, F |
| 6 | Flattern |
| 7 | 32, Fc, Relu |
| 8 | Dropout (0.2) |
| 9 | 2, Fc, Softmax |
| Model | Parameter Amount | Model Size (MB) | FLOPs |
|---|---|---|---|
| DetectNet | 728.96 | ||
| ResNet | 4.71 | ||
| modified-ResNeXt | 0.88 |
| Number of Vehicles Participating in CSS | Number of Quantified Information Bits |
|---|---|
| 2 | 4 |
| 3 | 3 |
| 4 | 2 |
| 5 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Hu, B.-J. Quantized Cooperative Spectrum Sensing in Bandwidth-Constrained Cognitive V2X Based on Deep Learning. Electronics 2021, 10, 1315. https://doi.org/10.3390/electronics10111315
Li J, Hu B-J. Quantized Cooperative Spectrum Sensing in Bandwidth-Constrained Cognitive V2X Based on Deep Learning. Electronics. 2021; 10(11):1315. https://doi.org/10.3390/electronics10111315
Chicago/Turabian StyleLi, Jingxian, and Bin-Jie Hu. 2021. "Quantized Cooperative Spectrum Sensing in Bandwidth-Constrained Cognitive V2X Based on Deep Learning" Electronics 10, no. 11: 1315. https://doi.org/10.3390/electronics10111315
APA StyleLi, J., & Hu, B. -J. (2021). Quantized Cooperative Spectrum Sensing in Bandwidth-Constrained Cognitive V2X Based on Deep Learning. Electronics, 10(11), 1315. https://doi.org/10.3390/electronics10111315