1. Introduction
The task of detecting lines and lanes was mainly developed in the field of ADAS (advanced driver assistance systems). In the beginning, ADAS were passive, but with new tools, these systems allow for more advanced tasks, i.e., active assistance. The subject of line detection is still valid in scientific papers [
1,
2]. Many algorithms and techniques are available. However, they may not be effective under specific conditions; for example, in the detection of airport runway lines that require precise driving of measurement equipment, such as mobile measurement trailers for checking the correctness of light intensity of airport lamps [
3,
4].
Steadily growing requirements of aviation agencies regarding flight safety have for several years been determining more and more precise control of lighting located on various airport areas, especially on runways and taxiways [
5]. A medium-sized airport has about 200 central axis lamps in white and red and about 180 touchdown zone lamps. However, there are many more light points on taxiways. Importantly, each lamp must meet the standards specified in the documents on the basis of which permits for the ongoing operation of the airport are issued. For example, according to the guidelines of the European Union Aviation Safety Agency (EASA), the airports must meet certain standards depending on the navigational aids used, supporting precise air operations (ILS—Instrument Landing System) [
5].
Typical airport lamps are equipped with halogen bulbs, which have a limited lifetime [
6]. Moreover, a possible decrease in the luminous efficiency of these lamps is caused by contamination of the prisms (e.g., by sticking, powdered rubber from aircraft tires). Nowadays, airports are forced by demanding safety rules to gradually upgrade lighting systems to ones based on LED light sources. Light emitted with such bulbs has different characteristics than halogen ones [
7], and this causes a need to prepare a measuring system that can be adapted to work with different light sources.
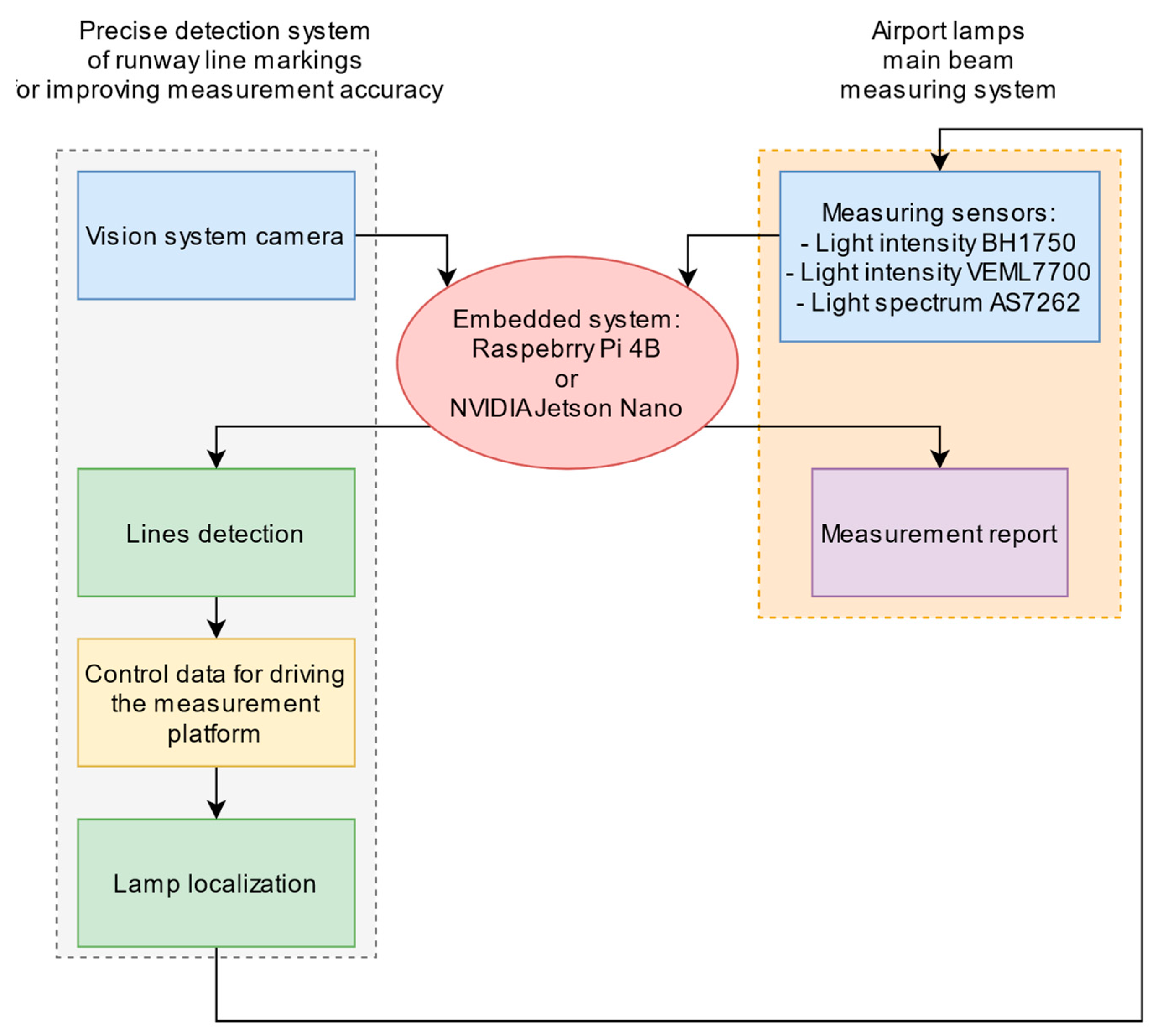
In order to analyze the possible applications of vision inspections in the measurement platform for testing the quality of operation of the airport lamps, it is necessary to divide the system into areas of activity in which the use of various types of cameras may be desirable.
Figure 1 shows a block diagram of the proposed solution that could help the driver/operator to immediately analyze the measurements parameters.
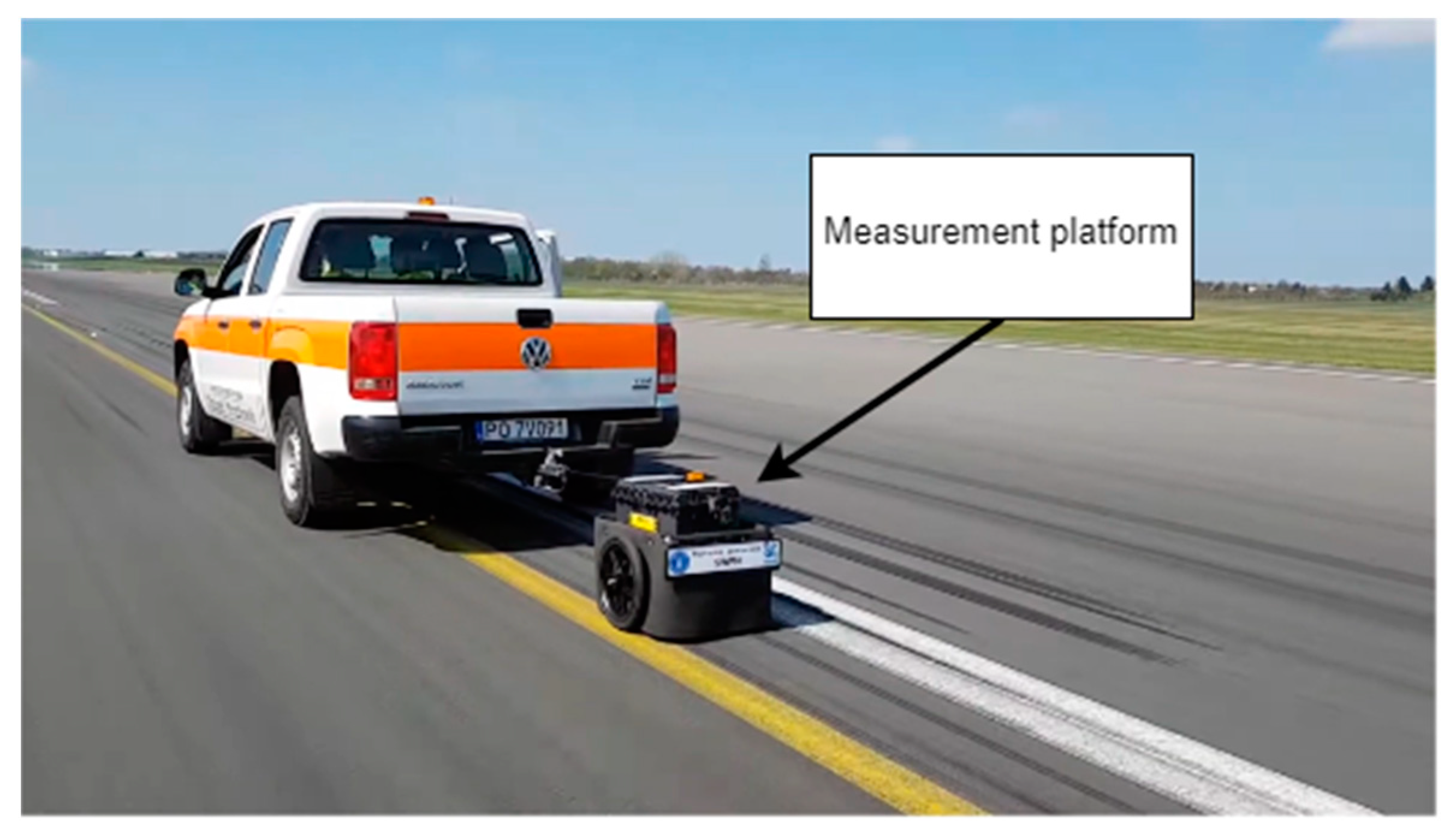
Various mobile systems for measuring the technical condition of airport lamps have been researched [
8,
9]. An exemplary solution built by the authors of this article is presented in
Figure 2 [
3,
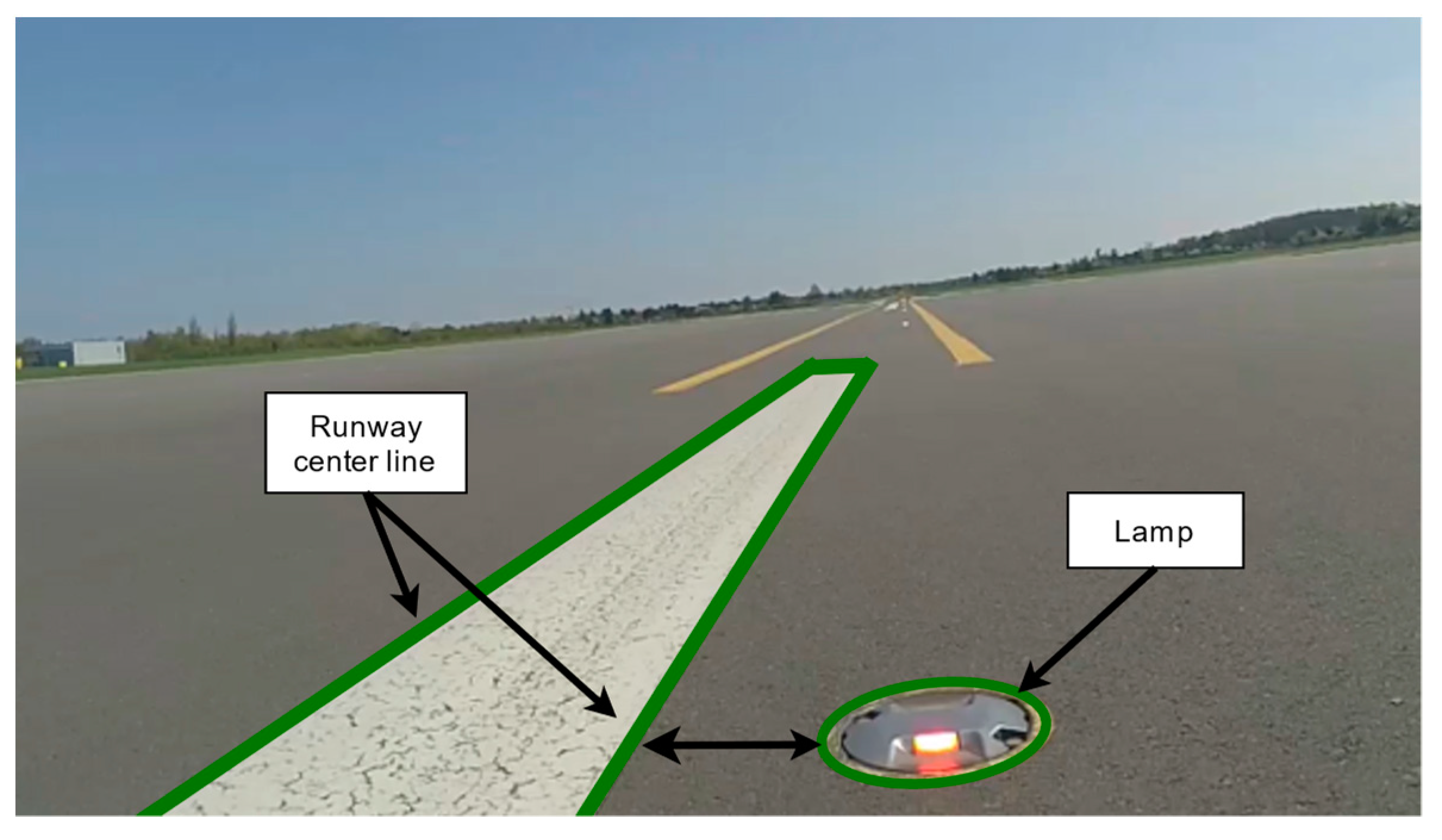
4]. Such systems require precise driving of the measuring device onto the tested lamp. It is quite important because very often, incorrect hovering on the lamp or its omission misclassifies the obtained results, which increases the time and cost of the inspection process. For an illustration of this problem,
Figure 3 shows the view from the platform for testing the quality of operation of the airport lamps during the lighting control. The location of the lamp over such a large area, without reference points in the form of the runway edge or other characteristic objects, is possible only based on the detection of center lines.
The differences in the luminous intensity values of the new and used lamps range from several hundred to several thousand lux, depending on the color of the emitted light and the distance from the source. The same differences may arise in the event of an incorrect drive-on and poor test execution, even with a new lamp that in the results could be classified as worn. Technical documentation describing the airport design process contains strictly defined luminous intensity standards expressed in candelas. This unit is treated as a standard to which the obtained results should be compared, each time converting readings from the sensors used.
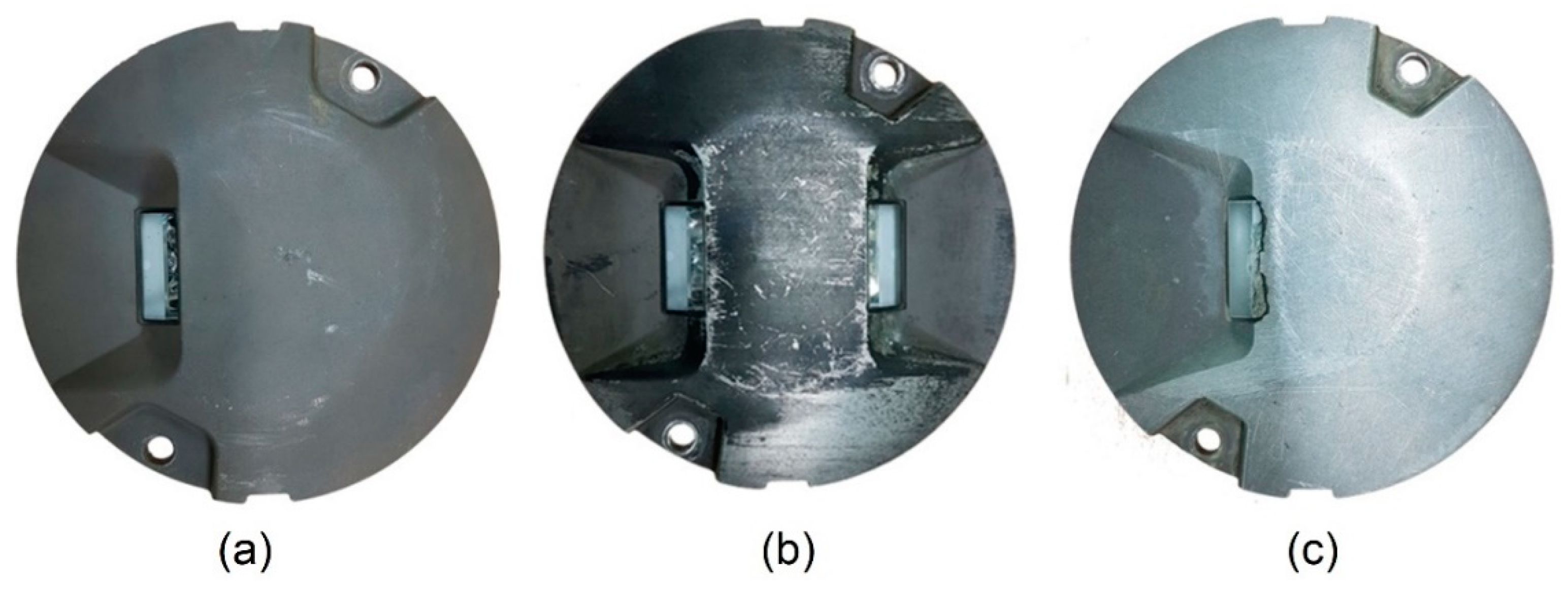
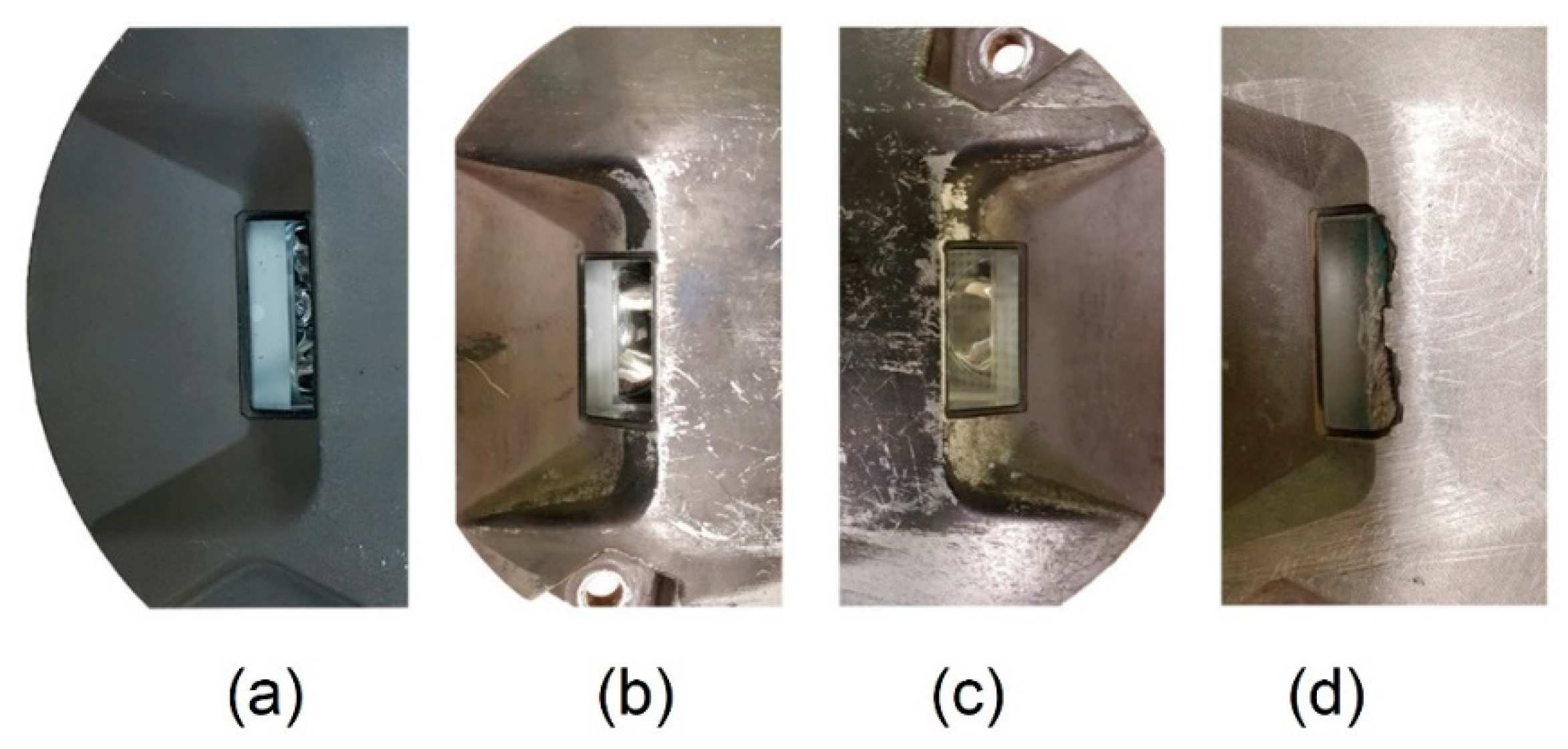
Figure 4a shows a brand-new lamp, which, together with its prism (
Figure 5a), serves as a reference point for comparing the state of wear of other lamps already used at the airport. The wear of the housing (
Figure 4b) itself is not the same as the wear or damage of the prisms (
Figure 5b,c). Significant scratches on the upper surface of the housing do not have the slightest effect on the correct operation of the lamp. Its prisms are practically in the same condition as those in the new lamp. At first glance, the lamp shown in
Figure 4c is not badly damaged. However, a closer look shows the damage to the metal edge near the top of the prism that occurred during the lamp operation. Such dents resulted in the lack of adequate protection of the prism glass (
Figure 5d), which, being scratched, chipped, and dull, classifies the lamp for replacement.
A very important element during the test is the feedback provided to the driver/operator, from which she/he can learn what needs to be done to maintain the appropriate angle and trajectory over the lamps during the test. In the case of maneuvers on such large areas as the runway, without significant reference points and in the absence of a continuous center line, this is an unmissable difficulty. During the tests at the airport, it turned out to be a very time-consuming task, during which one person had to follow the platform and keep the driver informed about the necessary maneuvers. It was particularly difficult to carry out tests of lamps on runway exits, where the lamps are located at different angles.
Therefore, this article focuses on the analysis of the driving trajectory based on the detection and prediction of the occurrence of runway centerlines and taxiways, but also on the analysis of lamps and an attempt to estimate their wear using a vision system. Thanks to the analysis of the central lines, the algorithm will in the future be able to estimate the probable occurrence of the lamp and properly instruct the operator to choose the optimal path. When building the platform, the authors focused on the universality of the system and the availability of the device. In these studies, sport cameras were used, which are good at stabilizing the image and obtaining acceptable quality images while maintaining resistance to the conditions of use of the equipment (possible changeable weather conditions, unfavorable lighting, etc.).
Due to the use of a trailer, particular difficulties in maintaining the correct track occur on long, straight sections (no fixed point of reference, no continuous center line) and on corners, where the driver/operator cannot see the exact track of the measuring platform behind the car.
The contributions of this article can be summarized as follows:
Modification of algorithms for the detection of public road markings in the form of lines for the use of the lane detection on airport areas;
Development of our own unique database in the form of recordings of driving along a real runway;
Analysis of modified line detection algorithm performance with the use of two different embedded devices.
2. Related Research
As was mentioned in the Introduction, the task of detecting lines and lanes was mainly developed for cars running on normal roads. There exist many different methods and algorithms for road detection research. They mainly focus on road models, edge detection, vanishing point detection, color segmentation and Hough transform. There are many different variations of these approaches as well as their combinations. As stated in the article [
10], one of the most robust methods is still the Hough transform and basic image processing. The road boundaries detection algorithm is based on edge detection. Additional processing into a bird’s eye on car roads makes great sense due to the relatively small size of the markings. Considering the use of a vision system to monitor the trajectory of the measurement platform for testing airport lamps, such an operation does not make sense due to the very large size of the lines. However, the idea of detecting horizontal markings by edge detection after, e.g., a color filtration operation is helpful in algorithm development.
The methodology of determining the direction of correction of the trajectory of the measurement platform for testing the quality of airport lamps may be similar to that described in the article [
11]. Positioning is done by detecting the lane lines. Then, according to the relative position of these detected features and the vehicle, the lane change is assessed. In the case of the measurement platform, the reference point will be the runway center line. After the camera system has been calibrated, a line will be set in the program responsible for the driver’s guidance, the crossing of which on either side of the frame will result in displaying an appropriate command for the operator to change the direction of movement.
More advanced solutions can be based on the assessment of environmental objects and the training of Bayesian network models [
12]. In the case of the airport and its areas, this solution is not the best due to the small number of details of the surroundings that change during the ride on a runway. The best method of determining the trajectory of the measuring platform for testing airport lamps is by reference to the markings on the surface.
Another interesting way of positioning the measurement platform on the airport areas is landmark-based vehicle localization [
13], which presents the way of using runway end points that can be used as landmarks. This article describes two important elements when using lane endpoints as reference points: the detection of lane endpoints and the evaluation of the estimation accuracy. In this case, a single camera was used. The next step in improving the algorithm may be adding a tool that can automatically deal with incorrect reading of road markings [
14] with the help of a convolutional neural network (CNN).
One of the modern solutions of line detection for car assistance can be found in [
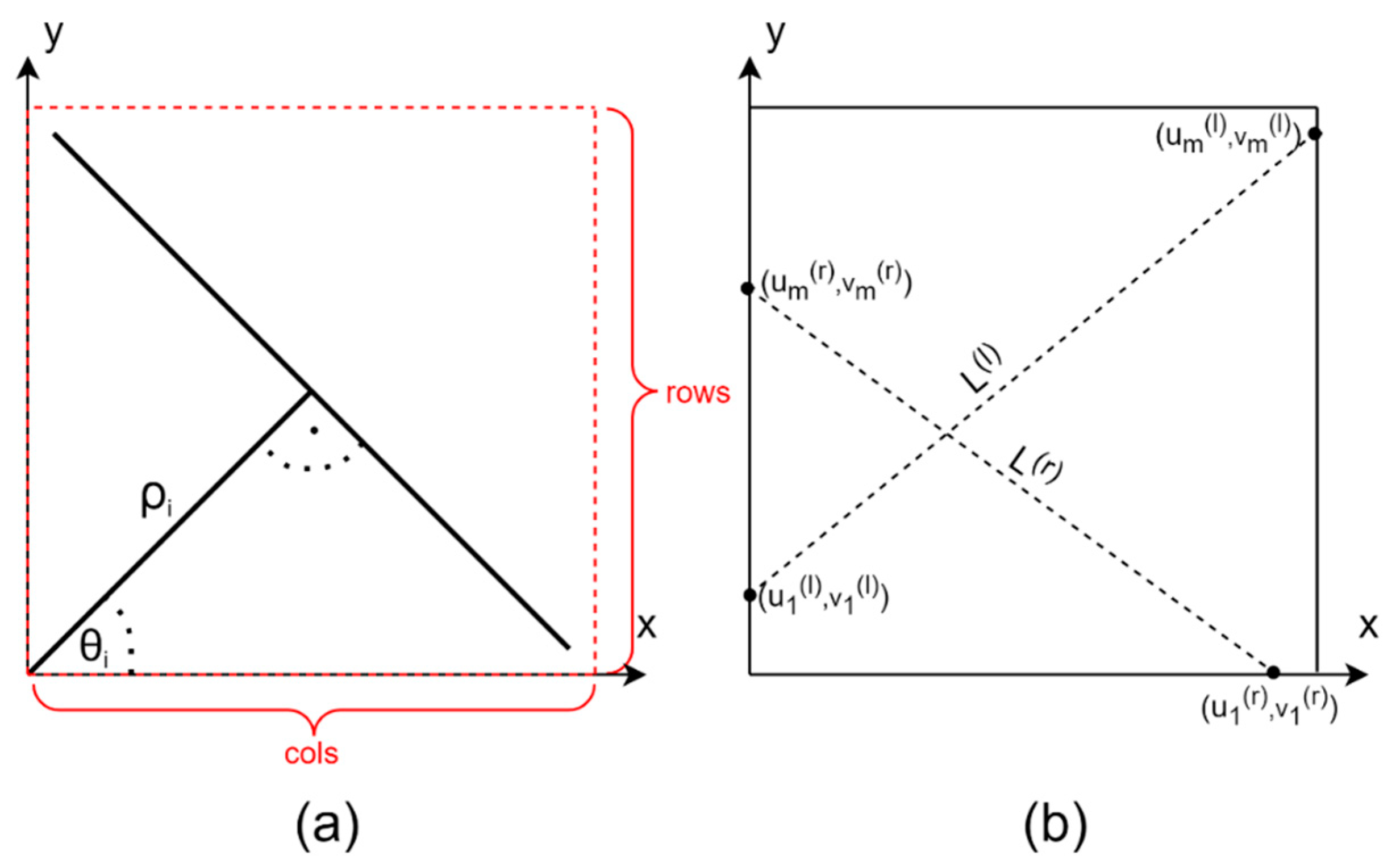
15], where the method of predicting the occurrence of lines and estimating distances with their help is presented. They are based on the detection of the VP (vanishing point) that should be found in the area where edge directional feature information is concentrated. The next requirement is the intersection of two straight lines in this area. Such a point can determine the optimal trajectory for a vehicle because, in most cases, it is the center of the lane. The method used for edge detection is based on the Hough transform.
A very interesting algorithm for detecting not very readable road markings has been described in detail in the article [
16]. It is resistant to interferences resulting from lighting and environmental conditions. Its principle of operation is based on live video processing with charge-coupled device (CCD) cameras, which is passed through an original mask. The presented examples show its significant advantage over Prewitt and Canny algorithms. The use of the original mask suggests a similar approach to the topic of detecting the central axis of the runway.
Line detection can be executed with the usage of solutions requiring more computational power according to higher complexity of deep learning methods. The article [
17] describes the methodology for detecting lane lines based on object feature distillation. The authors used different decoders for feature detection to improve the effectiveness of a neural network-based framework without additional costs, which was verified with methods such as SCNN, DeepLabv1, ResNet. Changes in the stage of preparing models were enough to achieve better performance of the
F1Measure parameter on the CuLane dataset. The article uses a workstation with the following parameters: Intel @ CoreTM i7-6800K
[email protected] GHz, NVIDIA 2080 Ti graphics card [
17], which is not possible in the mobile concerned, and determines the use of smaller units with weaker calculating parameters.
3. Horizontal and Light Markings Used in Airport Areas
At the airport areas, various types of horizontal markings in the form of multi-colored lines are used, as well as light navigation points. Their task is to enable the proper conduct of the procedures necessary to perform air operations. They assist pilots in determining the central axis of the runways and taxiways, the touchdown point, the beginning and the end of the runway, but it is also possible to read from the horizontal markings the place in which the aircraft is located in relation to the end of the runway. Despite increasingly sophisticated on-board instruments, the flight personnel must still rely on sight and visual aids.
Figure 6 shows a fragment of a satellite image and a view of the runway of the Poznań Airport, Poland.
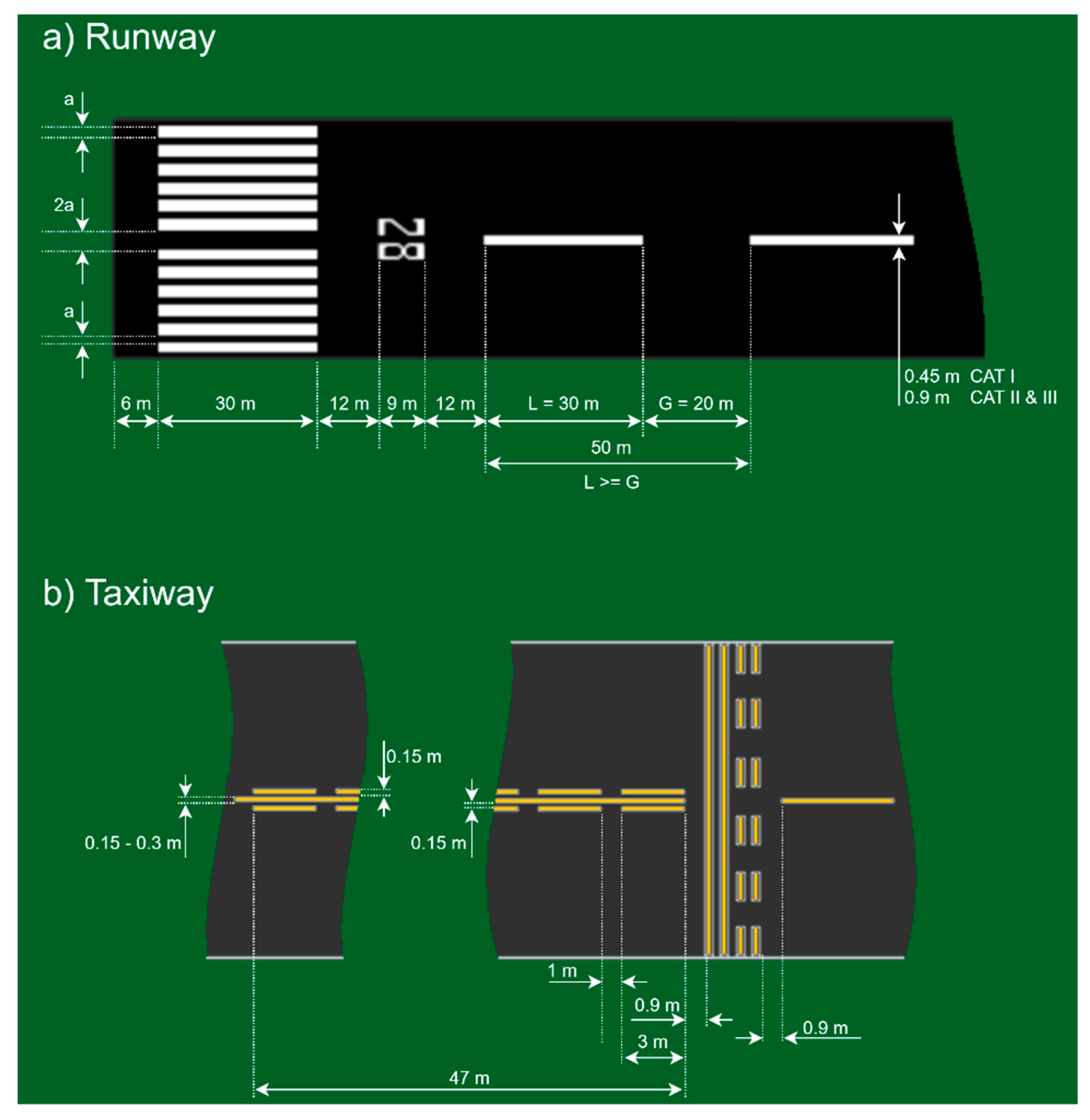
The most important markings, when looking at the implementation of this operator assist system, are the markings of the runway center line in the form of white stripes: 0.9 m wide, 30 m long and with a mutual distance of 20 m. They are located, as the name suggests, in the runway axis, and thus they constitute reference points for the measurement platform for testing the performance quality of center line lamps.
Figure 7 shows an example of horizontal road markings on an airfield runway and taxiway with descriptions.
As can be seen, these markings are very extensive. There are both dashed and continuous lines, sometimes side by side. This is determined by the location of the marking, which may indicate runway exits, holding points, stops, intersections, or unsafe sections. However, all markings are strictly described and appear in yellow. A black outline is used when such a marking does not contrast sufficiently with the pavement.
A very important observation during the tests and recordings was the wear of airport markings by the rubber from the aircraft tires sticking to the surface. It has a significant impact on the visibility of horizontal signs as well as recessed light points.
4. Video Materials
The airport areas, in which the tested lamps are located, can be compared to roads intended for cars. Thus, specificity of the airport sign detection is similar to that solved with the algorithms that enable operation of lane keeping assistants in modern passenger cars. With the current development of technology and automation, the automotive industry has already been subject to many changes. Thanks to this, numerous databases for checking algorithms, such as KITTI [
18], were created. They enable laboratory testing of methods that can be implemented in real situations. The existing systems are focused on collision avoidance and warning about possible obstacles on the road with the use of vision systems [
19].
Another aspect is estimation of the distance between vehicles using algorithms for detecting vehicle lights at night and normalizing the angle of their lighting [
20]. Subsequent systems are also based on the omnidirectional monitoring of the area around the vehicle [
21], which is extremely important on car roads, but not always effective for other applications. In areas of considerable width and often invisible central lines, it may be helpful to navigate by combining fusing semantic segmentation and monocular depth estimation [
22] or with the use of other algorithms allowing for a very good reproduction and denoising of the obtained images [
23]. The currently available monocular camera assessment and driving assistance systems [
24] may be equally helpful in assessing the driving style, but they are not fully effective due to the much larger distances between the lines on the runways. The next stage of research may be the identification of additional markings on airport roads, similarly to public roads [
25].
An obvious difference between public roads and airport areas is in their scale, because the plane areas are much larger. This determined to us the need to create our own video database. The recordings were made using two cameras in full HD resolution. Videos from the GoPro HERO + WiFi camera have a total length of 1 h, 13 min and 10 s and occupy 12.8 GB. Recordings from the XIAOYI YI ACTION camera have a total length of 2 h, 20 min and 50 s. Despite almost twice as long recordings, they occupy only 6.21 GB. During the recordings, a difference in the length of the operation of the cameras on a single charge was noticed, which is synonymous with the length of the recordings. Both cameras use the H.264/MPEG-4 AVC codec based on Context-Adaptive Binary Arithmetic Coding (CABAC). However, they differ in the levels used in the AVC standard. This term defines a set of constraints that indicate the degree of decoder performance required to read a given file. The device of the American manufacturer has the L4.1 level, and the Chinese one L4. This results in differences in the maximum allowable data transmission rate, which was noticed on the basis of the memory consumption of the received files. It is worth noting that after making test recordings with the GoPro HERO + and XIAOYI YI ACTION cameras, more details were found from the GoPro camera.
6. Results and Discussion
6.1. Testing the Effectiveness of Individual Algorithms
During the tests of each of the prepared algorithms, individual result frames were recorded. The experiment was carried out for 100 frames from various recordings acquired during the airport lighting control. In addition, the line detection efficiency and the speed of the following algorithms were compared:
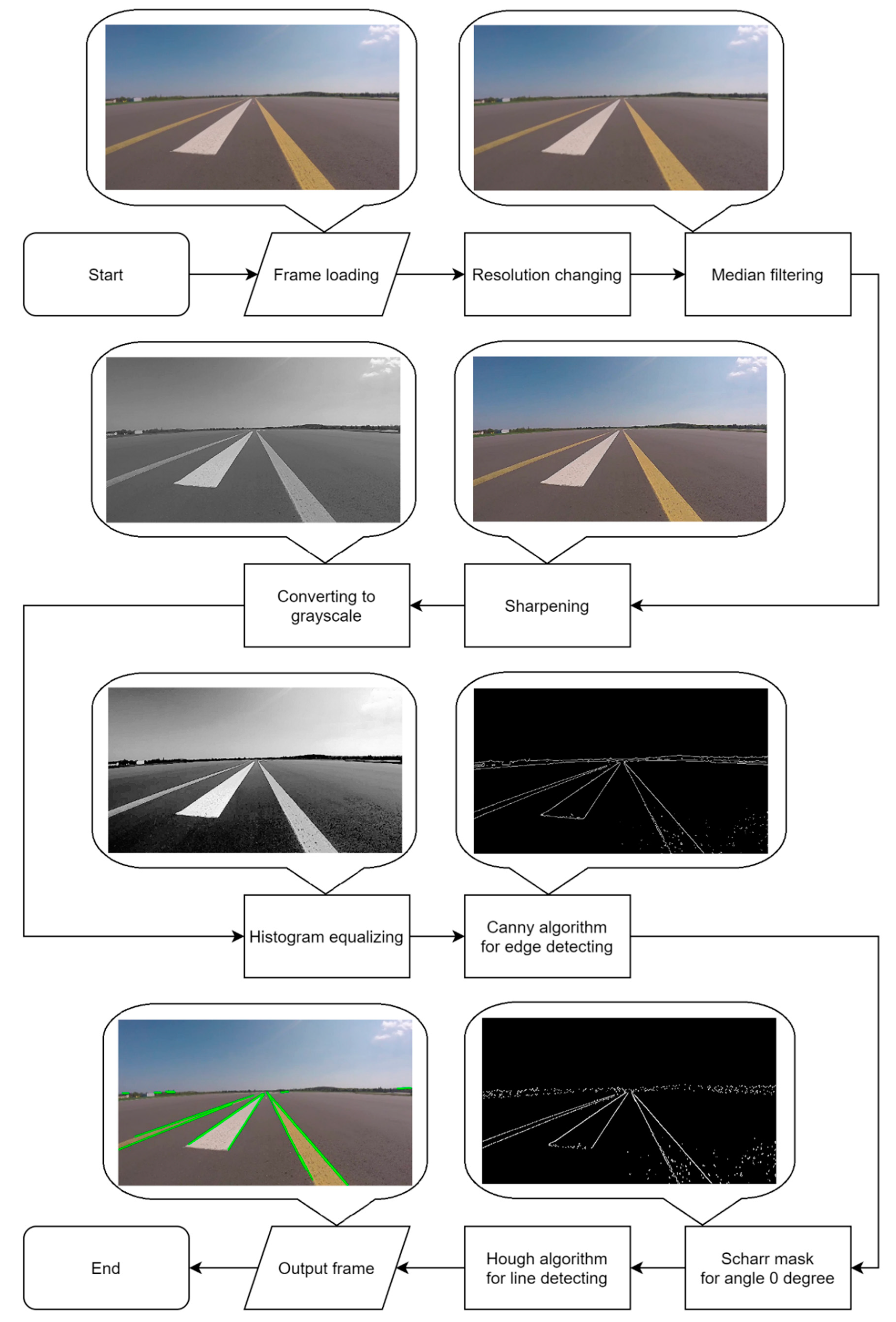
Algorithm 1-cf. 5.1 (preprocessing + histogram EQ + Canny + Scharr + Hough)
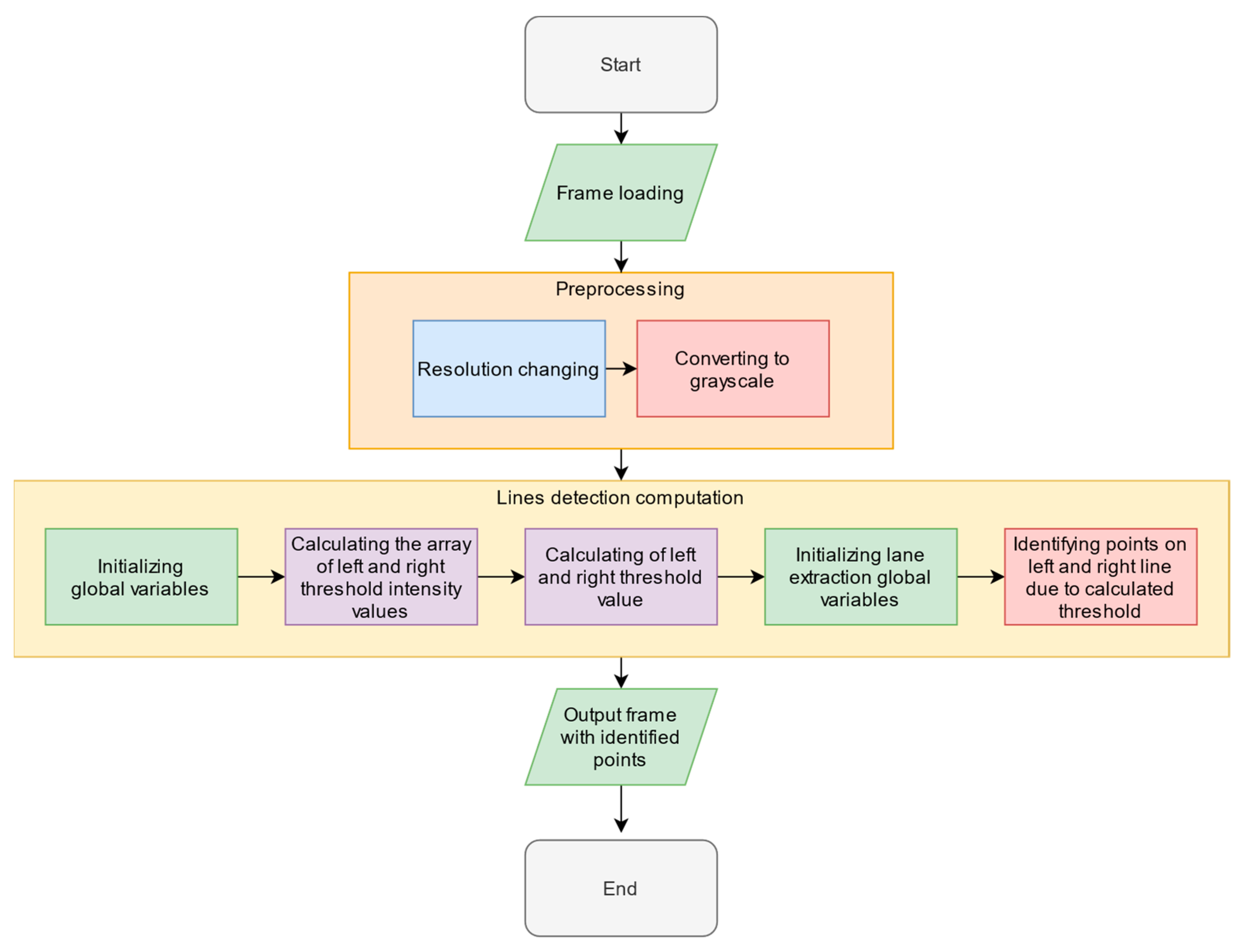
Algorithm 2-cf. 5.2 (preprocessing + threshold + Canny + Hough + hyperbolas fitting)
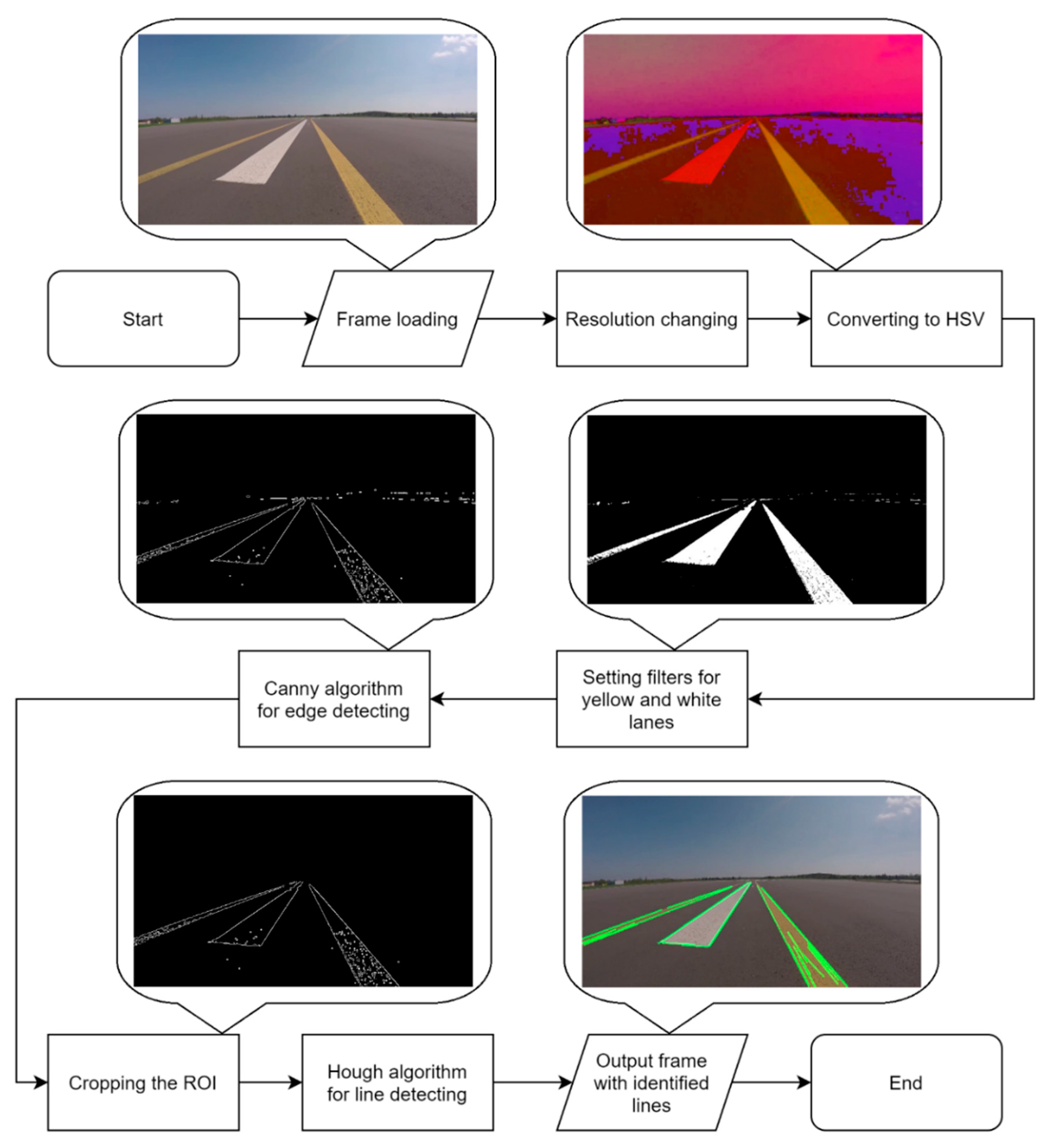
Algorithm 3-cf. 5.3 (preprocessing + HSV + Canny + Hough).
Tests were performed for six different resolutions:
FHD (1920 × 1080)
HD+ (1600 × 900)
HD (1366 × 768)
WXGA (1280 × 720)
nHD (640 × 360)
320 × 180.
As a result, every algorithm provided an output of 600 frames with marked lines, but the differences among preprocessing stages and methods used meant that there were not any identical images at the end of detection. Each frame was assessed in two categories. First, it concerned the detection of any line on the airport areas.
The percentage value categorizing the results of the algorithms’ operation was determined by Formula (4). The variable r means the result of manual classification in a given category, while n means the number of samples-video frames.
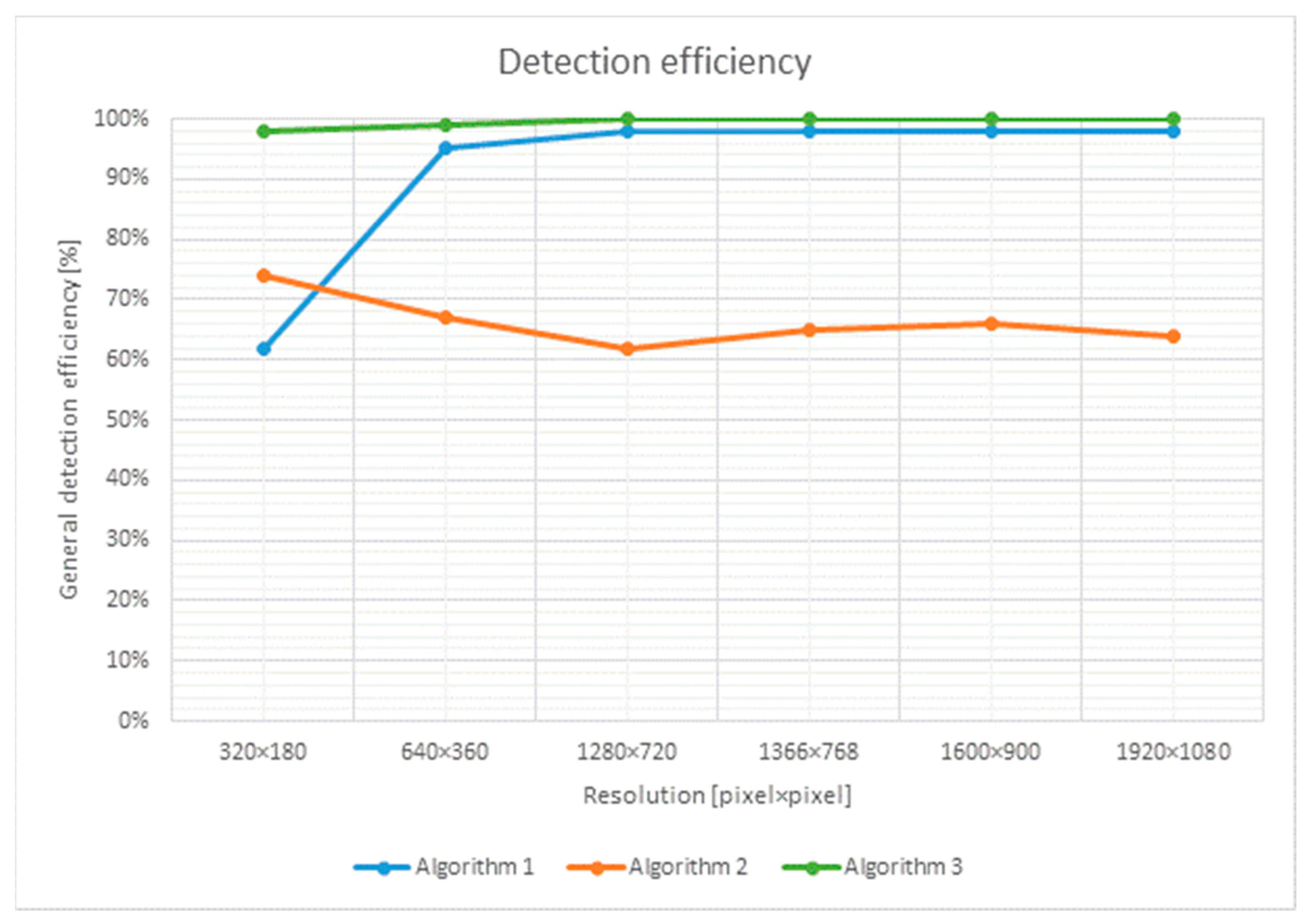
The effectiveness expressed as a percentage for the individual algorithms is presented in
Figure 15. It can be seen that Algorithm 2 significantly differs from the results of the other two. The main reason is certainly the way the program works, which is based on mathematical calculations, not on image processing operations. Interestingly, the algorithm achieved the greatest efficiency at the lowest tested resolution. This could be due to the lower detail of the frames, which simplified the calculations and improved the line detection efficiency. Algorithms 1 and 3 show the opposite tendency, i.e., the higher the resolution, the better the efficiency, which in the first case remains at a high level of over 90%, and for method 3, it reaches even 100%.
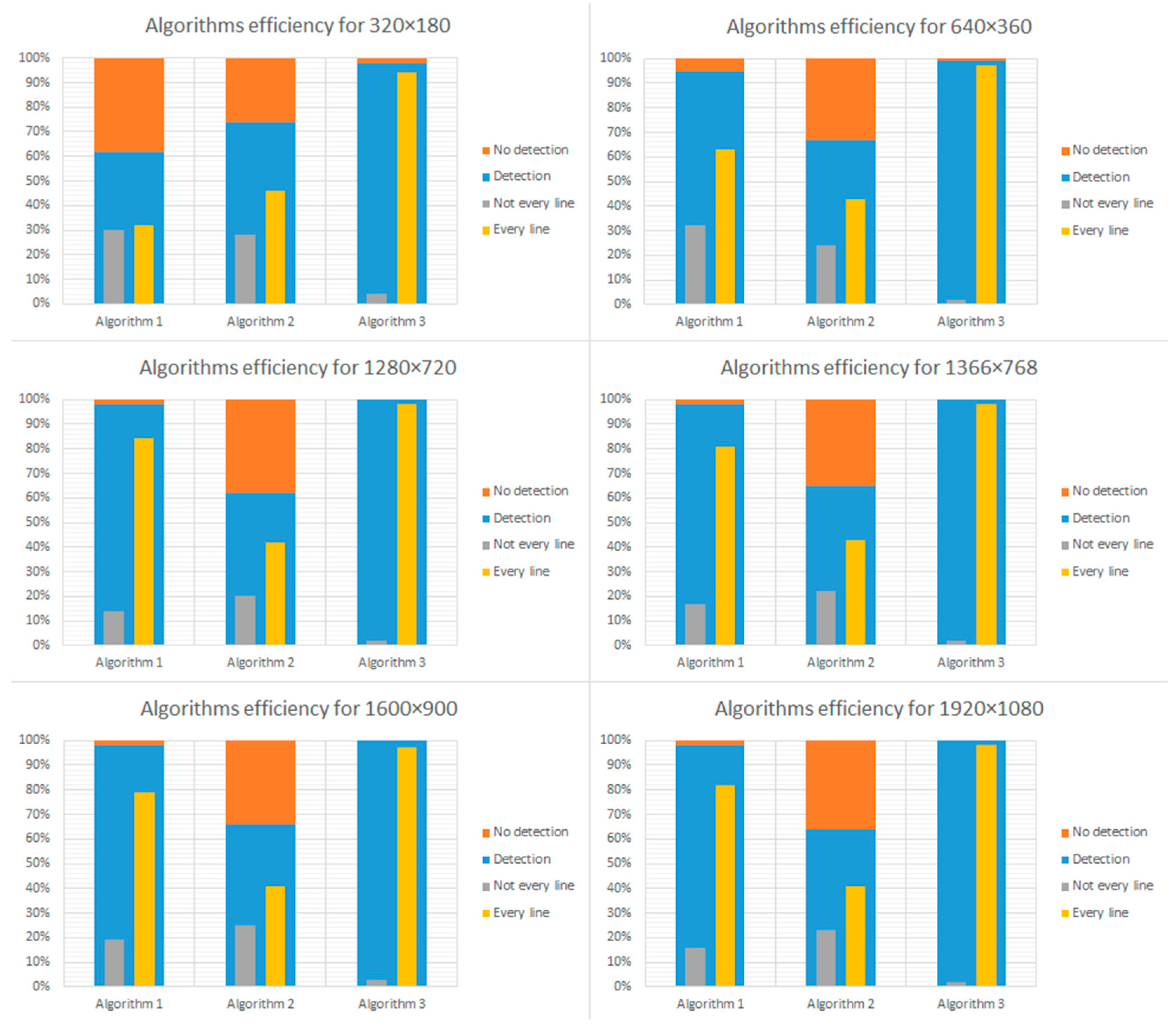
The second step in classifying the effectiveness of the algorithms was to determine whether the image detected all lines and markings visible in the critical area of the frame (just in front of the lens, roughly in the center of the image) or not. A list of the detailed parameters determining the degree of the line detection efficiency depending on the frame resolution is presented in
Figure 16. The efficiency of Algorithms 1 and 3 remained at about the same level, taking into account the effectiveness of detecting all lines in the area just in front of the camera lens, roughly in the center of the image for resolutions above WXGA. The decrease in effectiveness was visible for the lower resolutions for Algorithm 1, but the algorithms worked much faster. It should be noted that Algorithm 2, which is based mainly on calculations and not on image processing, is the worst, classifying its effectiveness at the level of 40–45%.
It can be seen that Algorithm 1 makes erroneous identification of both edges of the painted line. During classification, it was interpreted as a failure of detection of all lines. At higher resolutions, i.e., from WXGA up, there was also a lot of background noise, i.e., edge detection in the middle of the black asphalt, which was not the case with the other two algorithms. Another problem of Algorithm 1 manifested itself with lines that were further away from the camera lens, i.e., about half the height of the frame. The edges were not detected at all or were incorrectly detected.
On the contrary, Algorithm 2 works very well in situations where there is one white line (central line) in the frame. The line detection efficiency is also satisfactory for up to two lines in the field of the camera view. This is the result of adapting this algorithm to determining the lane between two lines. The complete problem with detecting any line is especially visible for yellow color, which is largely unrecognized by this algorithm. In this case, fragmentary line detection is noticeable only in turns and at a far distance from the camera (above half the height of the cage), which, from the point of view of using this algorithm to support the approach of the measurement platform to test the quality of the airport lighting, definitely disqualifies it.
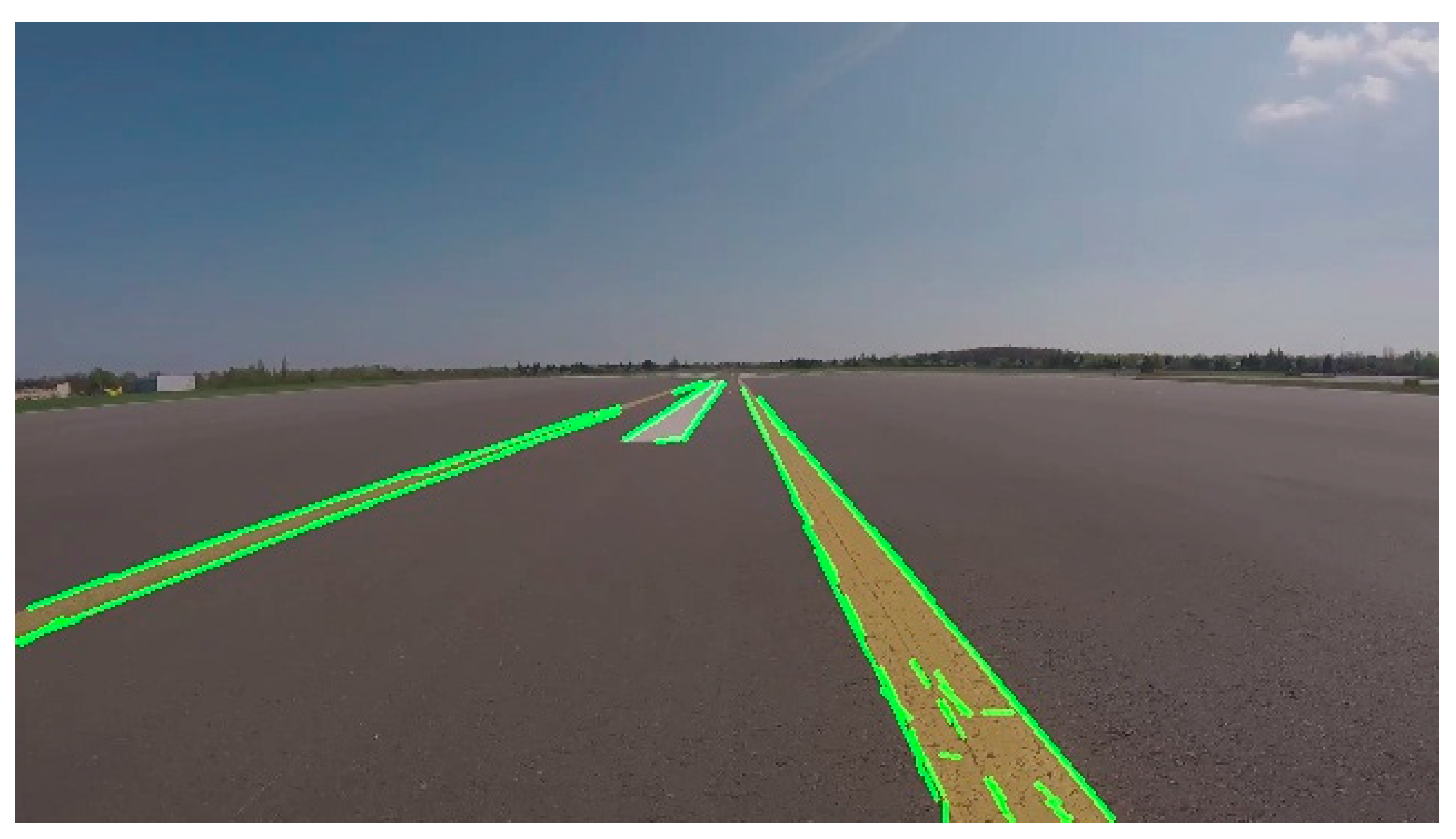
The definite favorite is Algorithm 3, which does a great job of detecting airport plane markings. During testing, it detected almost all edges of all lines visible in the cage in almost every case. This applies to both white and yellow stripes. Admittedly, for higher resolutions, there are noises from nHD upwards, but thanks to the use of color segmentation, they are only inside the outlines of the lines, which does not have any impact on the correct interpretation of the results. These noises are very small edges detected, for example, due to the texture of the surface, which is not perfectly smooth, and thus the line itself is not an area of uniform color or there are even places of no paint. Changing the length parameters of the detected lines could potentially eliminate this problem, but due to the need to identify lines seized by tire rubber in the touchdown zone, this is impossible. Algorithm 3 did the best among those proposed, detecting all lines in this area without any problems.
6.2. Testing the Effectiveness of Individual Algorithms
In order to check the performance of individual algorithms depending on the resolution, it was decided to run the programs on various devices: virtual machine with Ubuntu, Raspberry Pi 4 model B (
Figure 17) and NVIDIA Jetson Nano (
Figure 18) [
34,
35].
The parameters of the equipment are summarized in
Table 1. This test was designed to select a device that can be used in the development of the measurement platform for testing the quality of operation of airport lamps. The main criteria were small size and good performance. To compare the performance of three used devices, benchmarks were carried out using the TTSIOD 3D Renderer algorithm (Phong Rendering With Soft-Shadow Mapping) and PyBench (Total For Average Test Times). In the former, an increase in the FPS value means a better result, and in the latter, an increase in computing time means a worse result. In both cases, a virtual machine performed best; however, it was used to represent a benchmark for workstation performance. Nvidia Jetson Nano, due to the better graphics processor, obtained a better result in TTSIOD 3D Renderer, and the Raspberry Pi 4 model B has a more efficient CPU processor, which was presented in the PyBench benchmark.
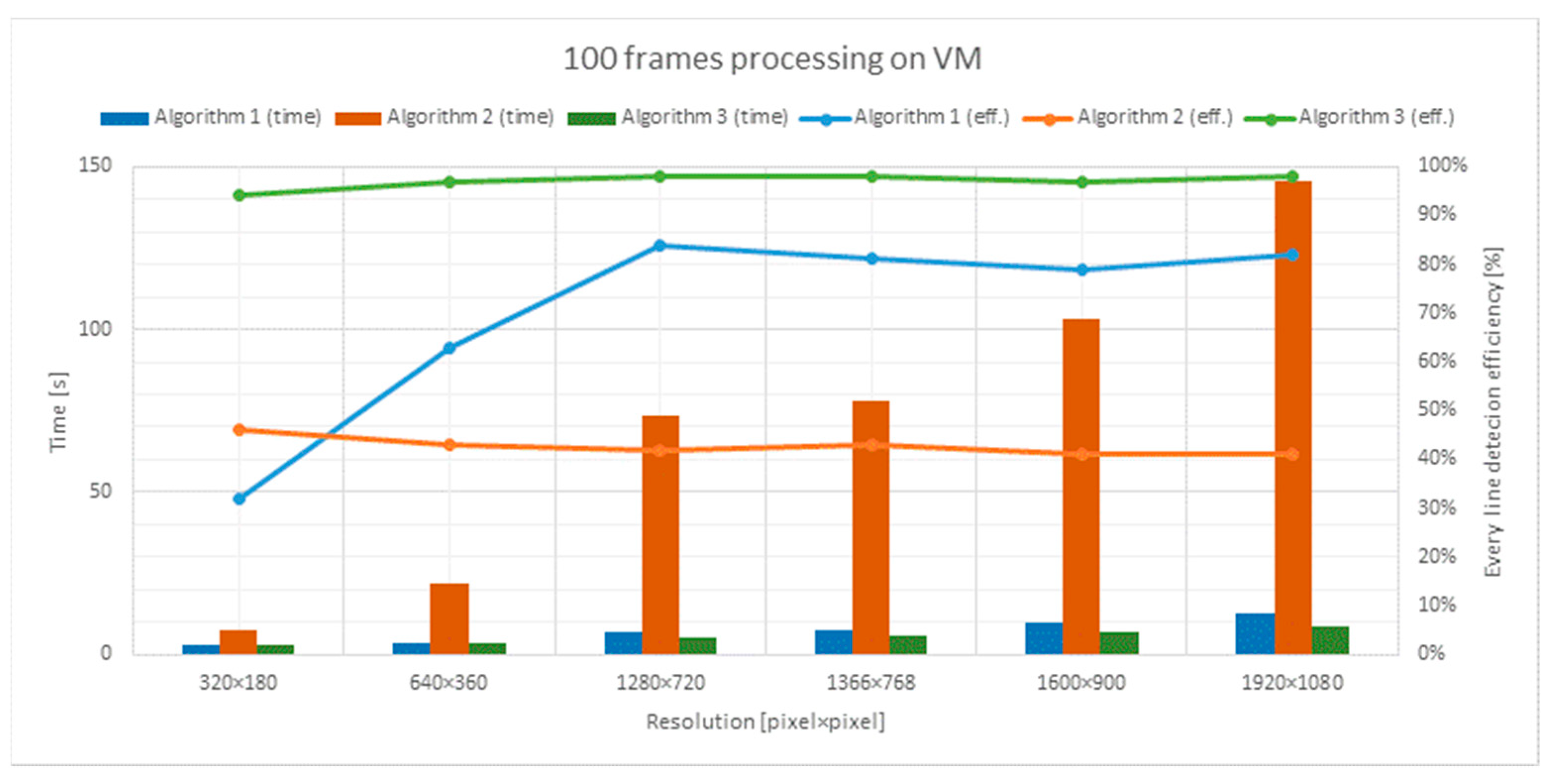
The mean number of frames per second was calculated using Formula (5). The frames per second variable is the result, n is the total number of video frames statistically measured, and T is the total processing time for whole set of n frames done by the algorithm. The dependence of the input frame resolution change on the efficiency of detection of all lines and the program execution time for 100 frames is shown in
Figure 19, which includes data obtained in a virtual machine. The conclusion from this analysis is that changing the resolution primarily affects the program execution time, but does not significantly affect the correct line detection for resolutions from WXGA up. The time bar graph shows that the performance of Algorithms 1 and 3 is similar, although Algorithm 3 is advantageous. Algorithm 2, due to the complexity of the computations necessary for image analysis, takes a very long time to complete the line detection task. As expected, program execution time increases with increasing resolution.
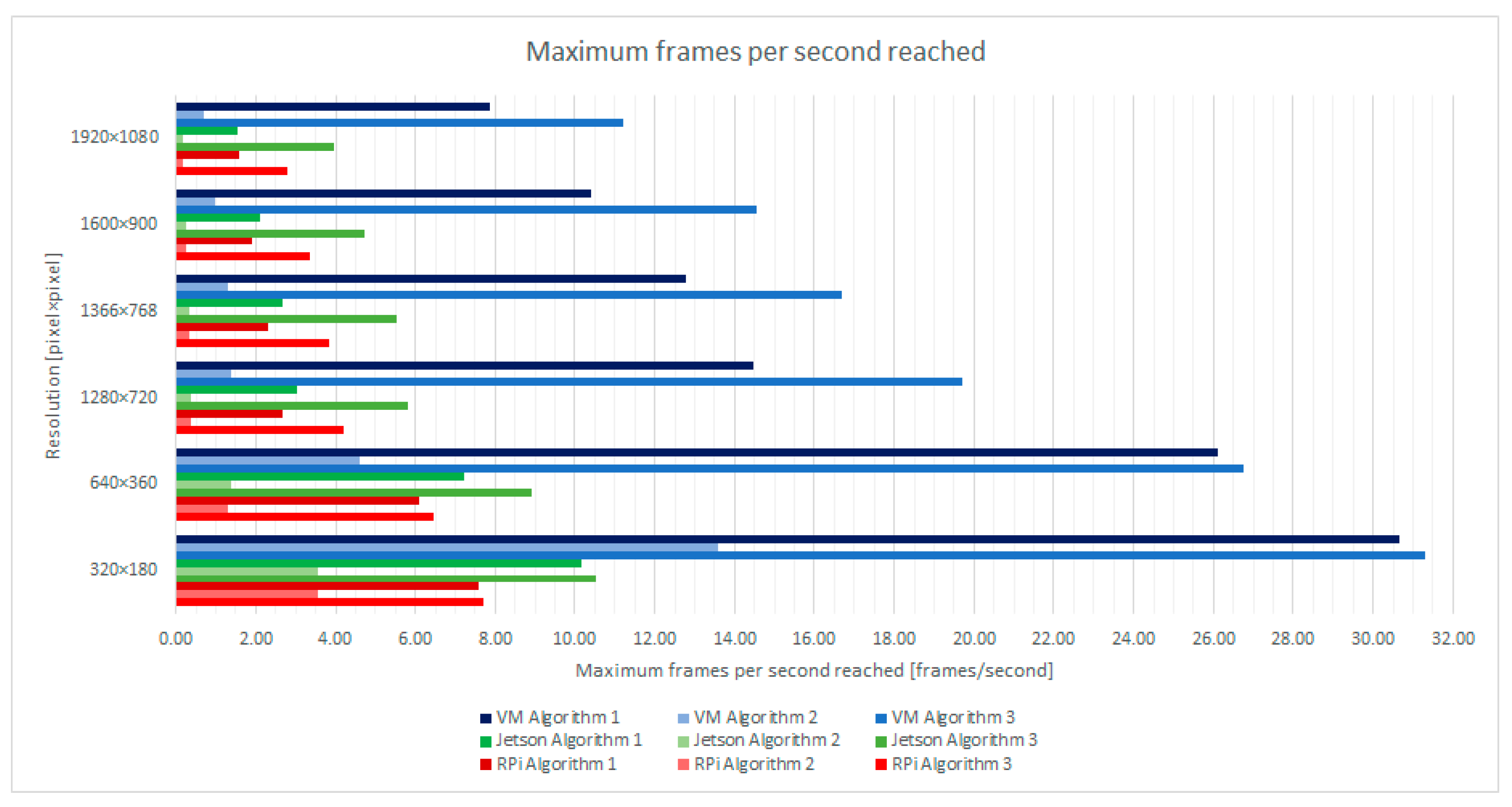
The same observations apply to the hardware issue. The graph showing the dependence of the input frame resolution on the number of frames per second for the tested devices is presented in
Figure 20. The weaker the specification, the worse the performance, although it should be noted that both microcomputer modules for small resolutions coped with this task decently for Algorithms 1 and 3. The computing power requirements for Algorithm 2 exceeded them significantly. The best results, over 30 fps, were achieved on the most efficient virtual machine in the list. The NVIDIA Jetson Nano microcomputer has slightly higher performance than the best Raspberry Pi 4 model B currently available on the market.
For the line detection task for the airport performance measurement platform, the best solution is to use Algorithm 3 for nHD resolution using the NVIDIA Jetson Nano microcomputer. Tests have shown that with such a selection of equipment and parameters, it is possible to achieve detection of all lines at the level of 98% while maintaining the processing efficiency of approx. 9 fps. This result is the golden mean in the choice that should be made considering the extension of the airport lamp tester.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}