
UAV Object Tracking Application Based on Patch Color Group Feature on Embedded System


 ,
,  and
and 
Abstract
:1. Introduction
- ❖
- An efficient PCGF algorithm for a generic approach is proposed to present the object features and compare the features matching score of the previous frame and the current frame.
- ❖
- We introduced a background subtraction technique for PCGF to eliminate background characteristics and ensure the object features are reserved.
- ❖
- The proposed method has been implemented on an embedded system, in addition, the proposed approach achieved the real-time speed on a CPU platform without a GPU accelerator.
2. Related Work
2.1. Deep Learning-Based Tracking
2.2. Generic Method
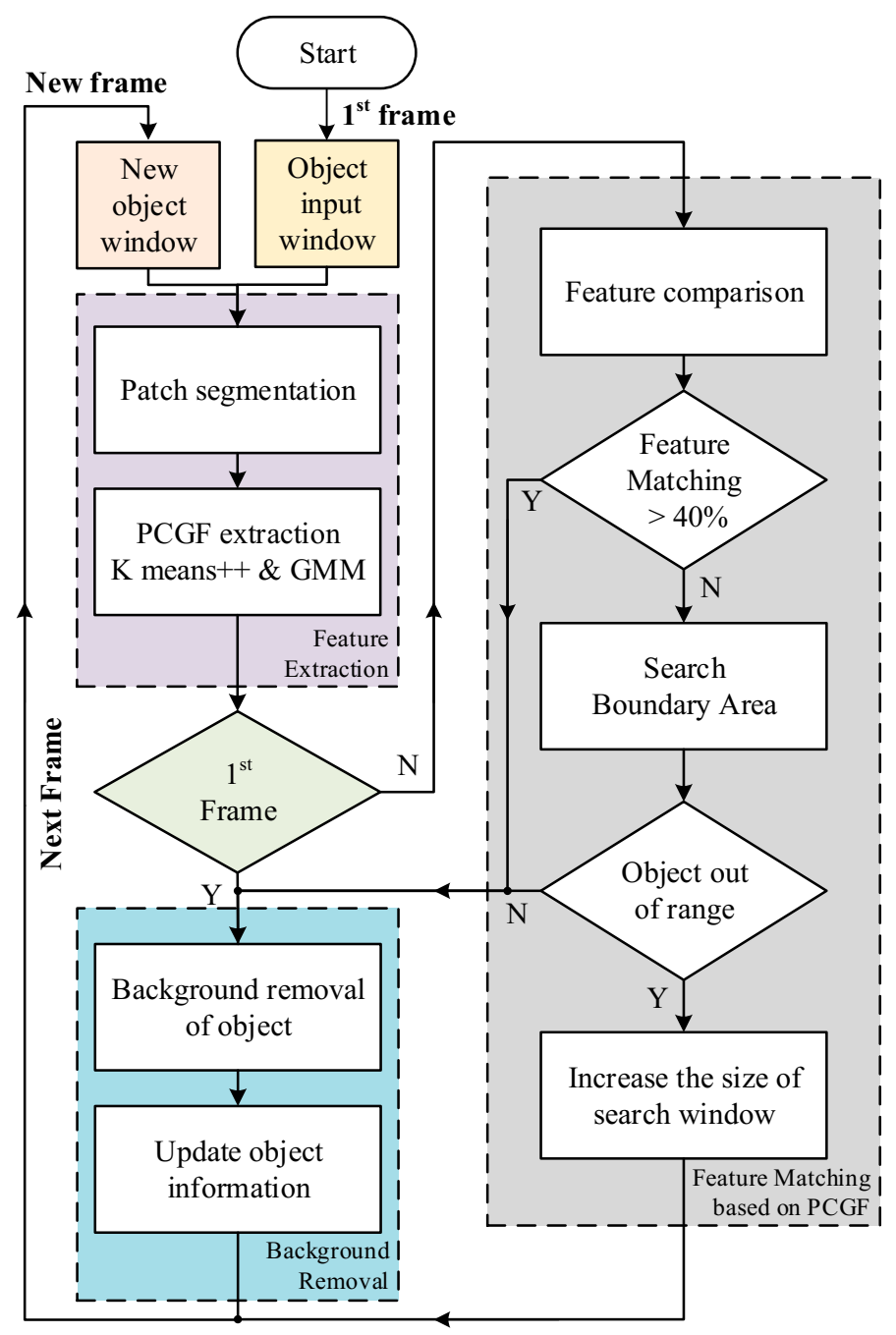
3. Proposed Method
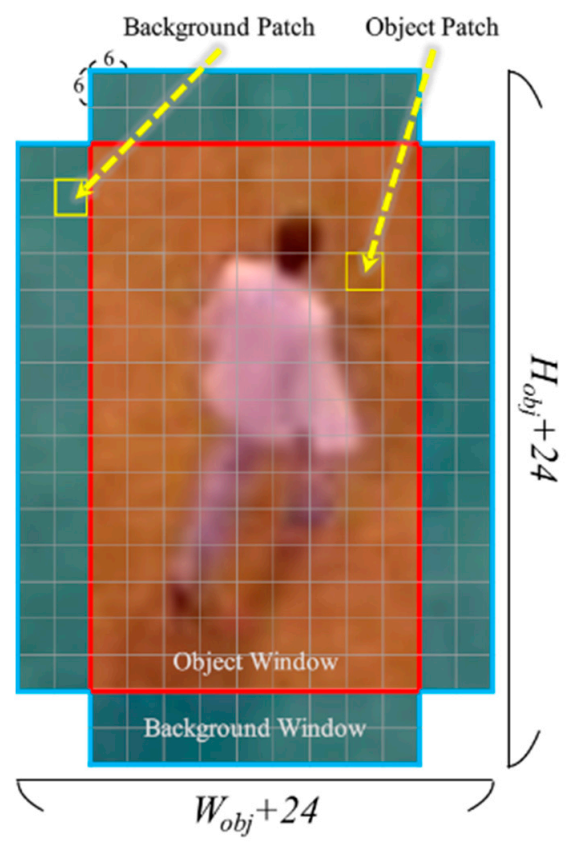
3.1. The Function of the Input Window
3.2. Patch Segmentation
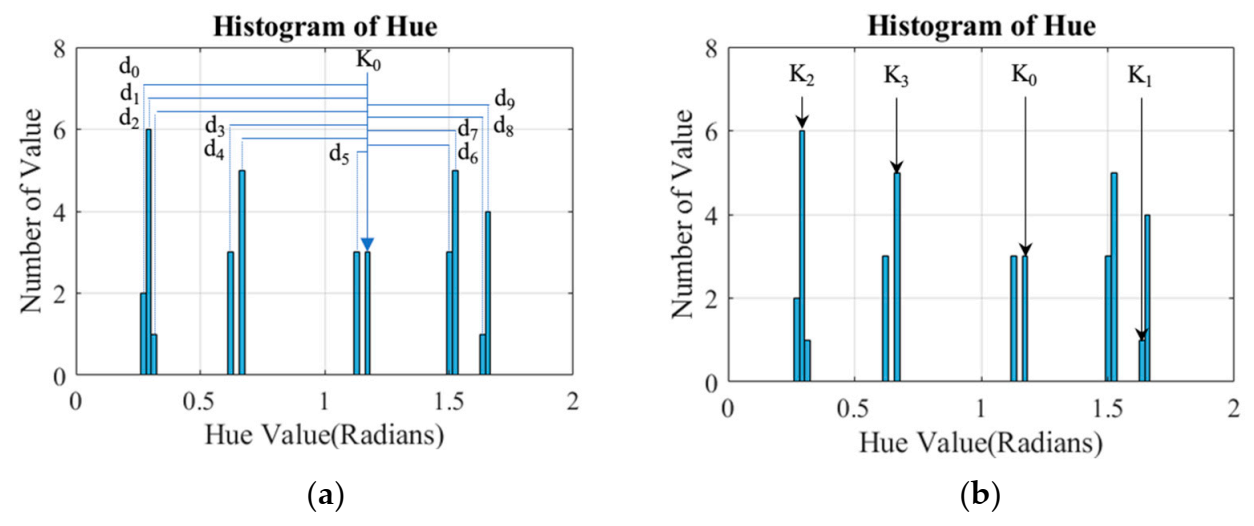
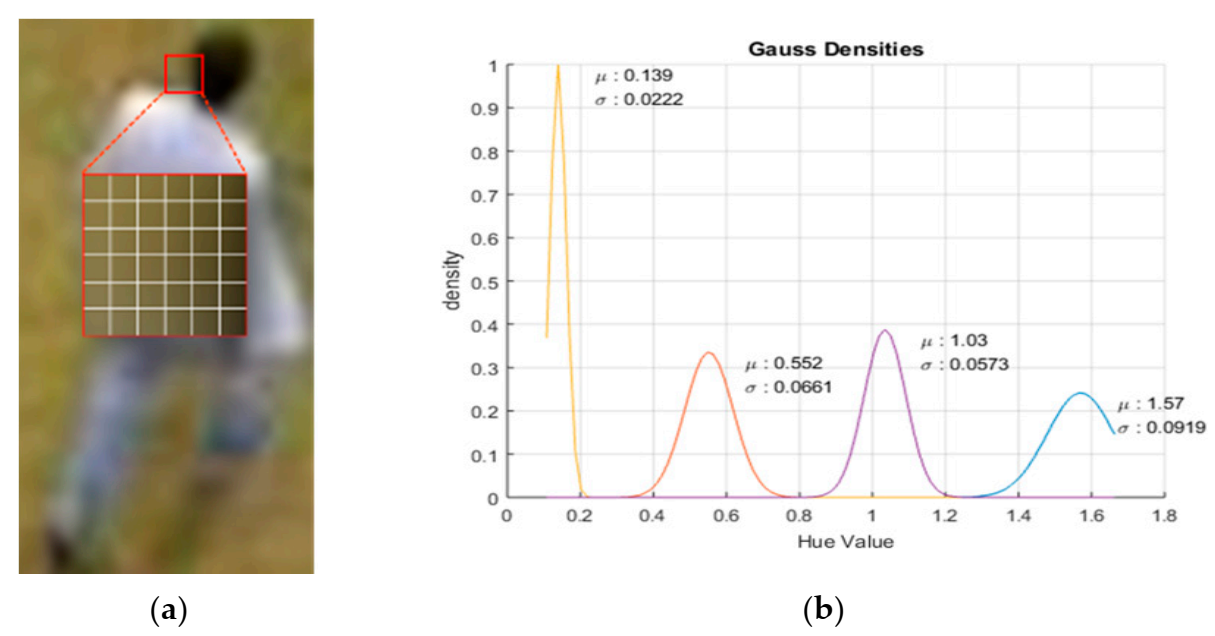
3.3. PCGF Extraction of K means++ and GMM
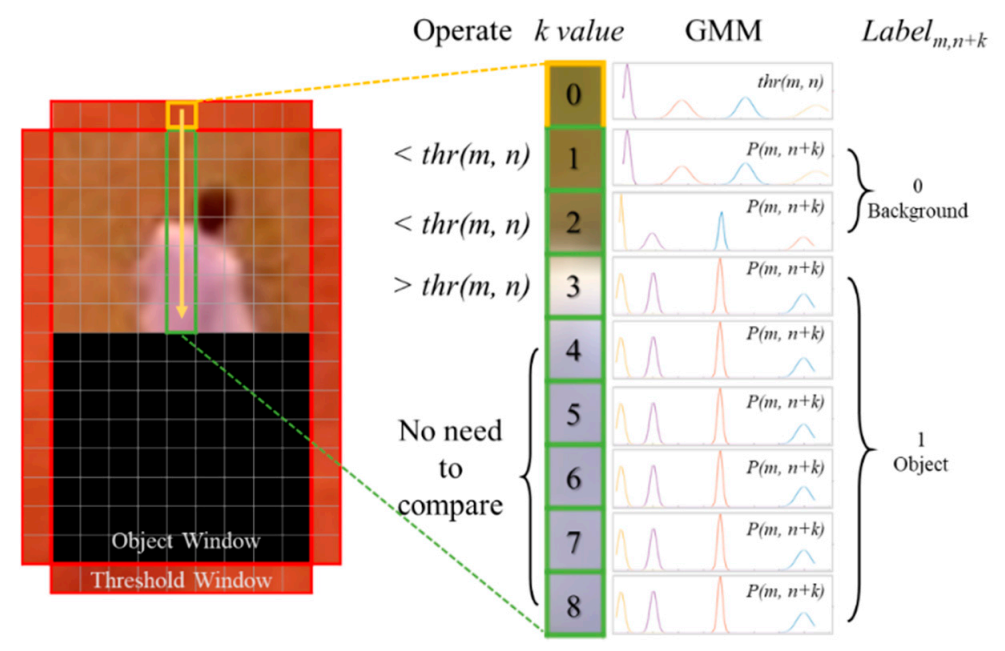
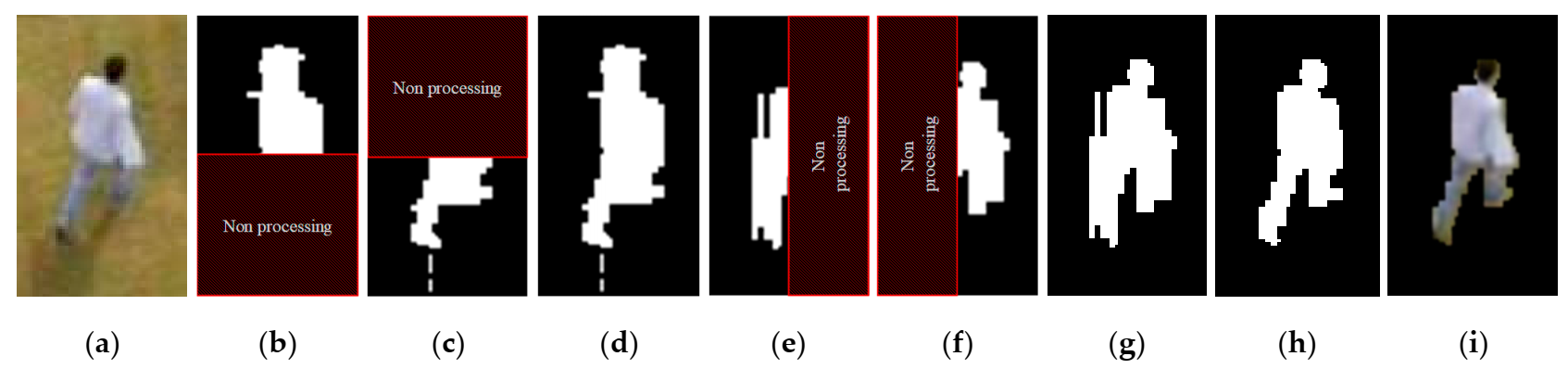
3.4. Background Patch Removal from the Object Window
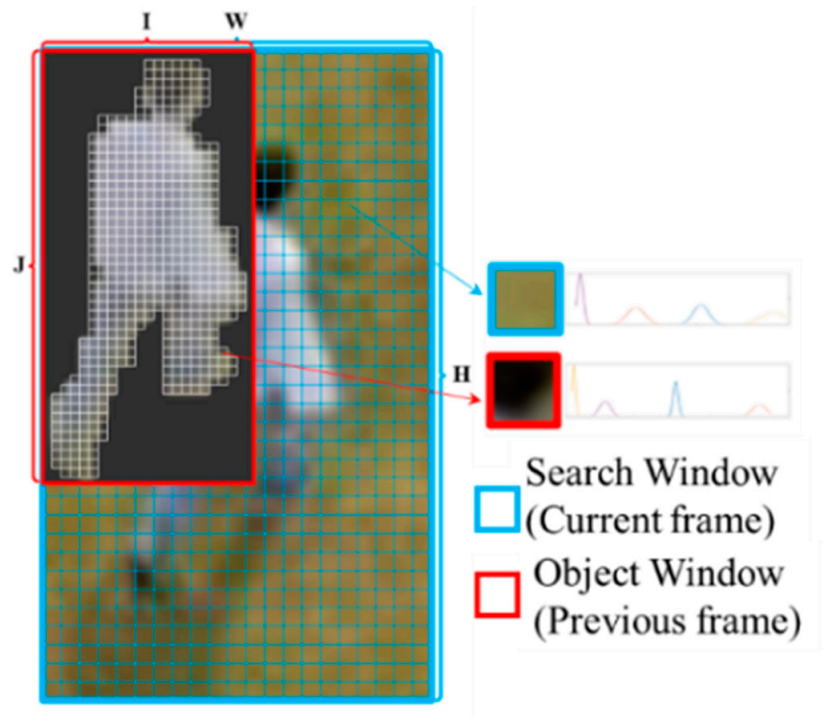
3.5. Feature Matching Based on PCGF
3.6. Object Out of Range (Boundary Area)
3.7. Object Occlusion
4. Experimental Results and Analysis
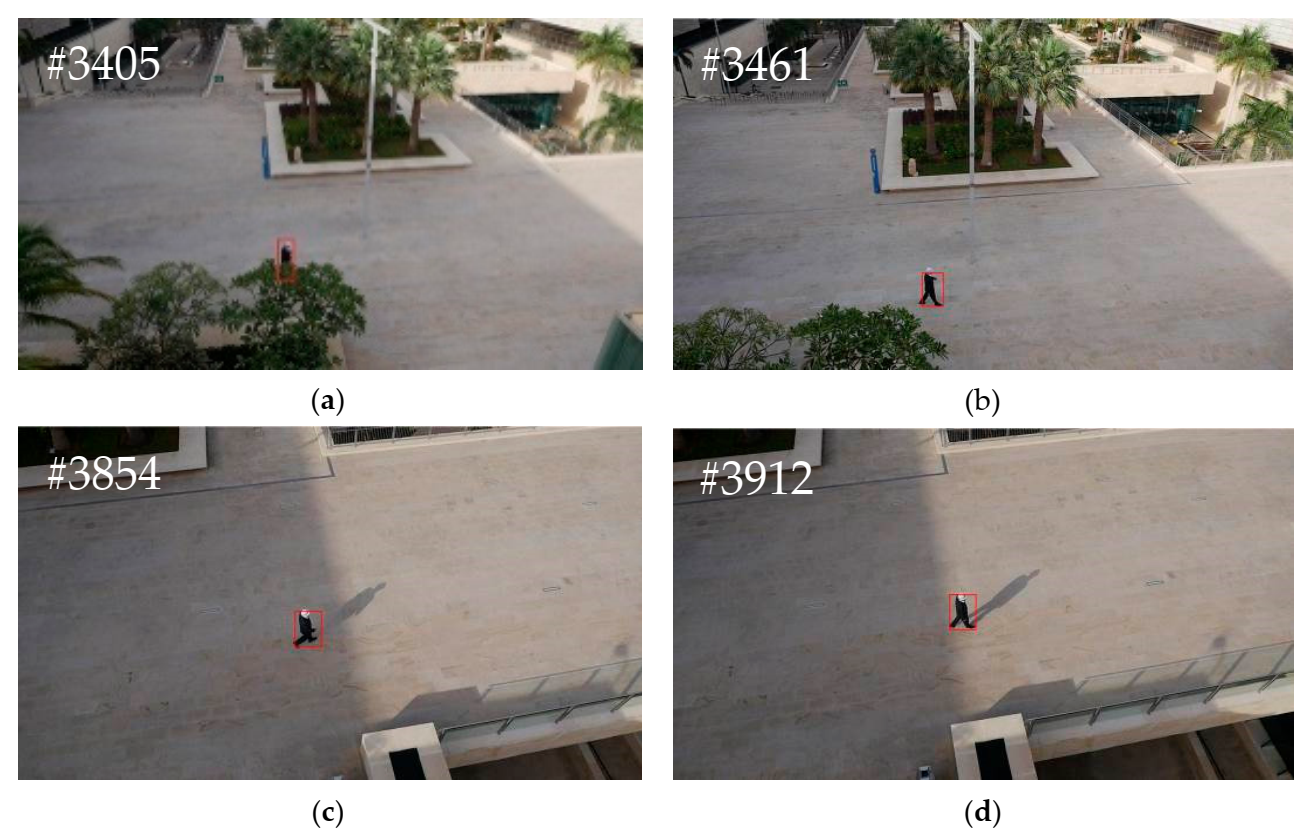
4.1. Measurement Results
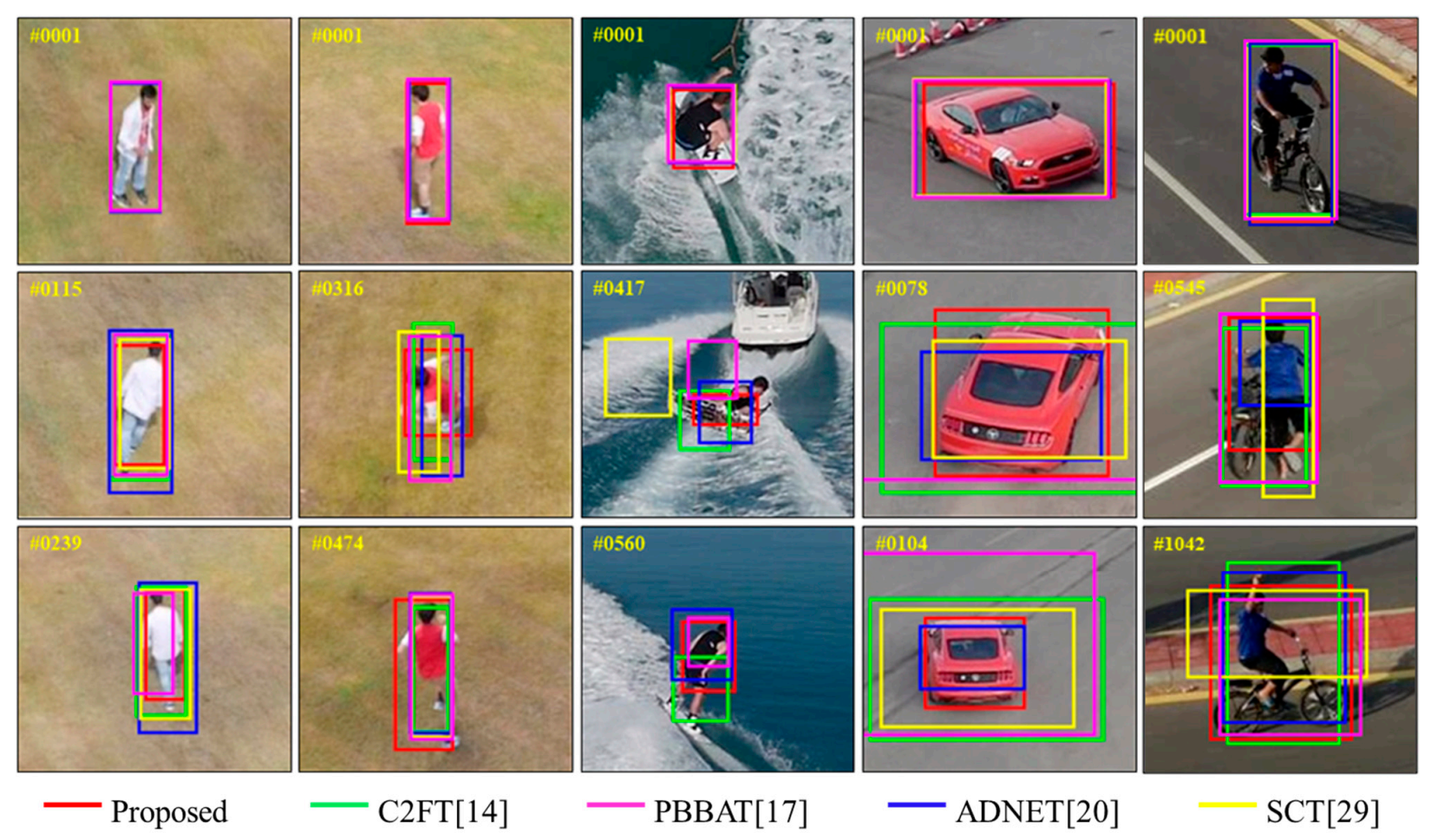
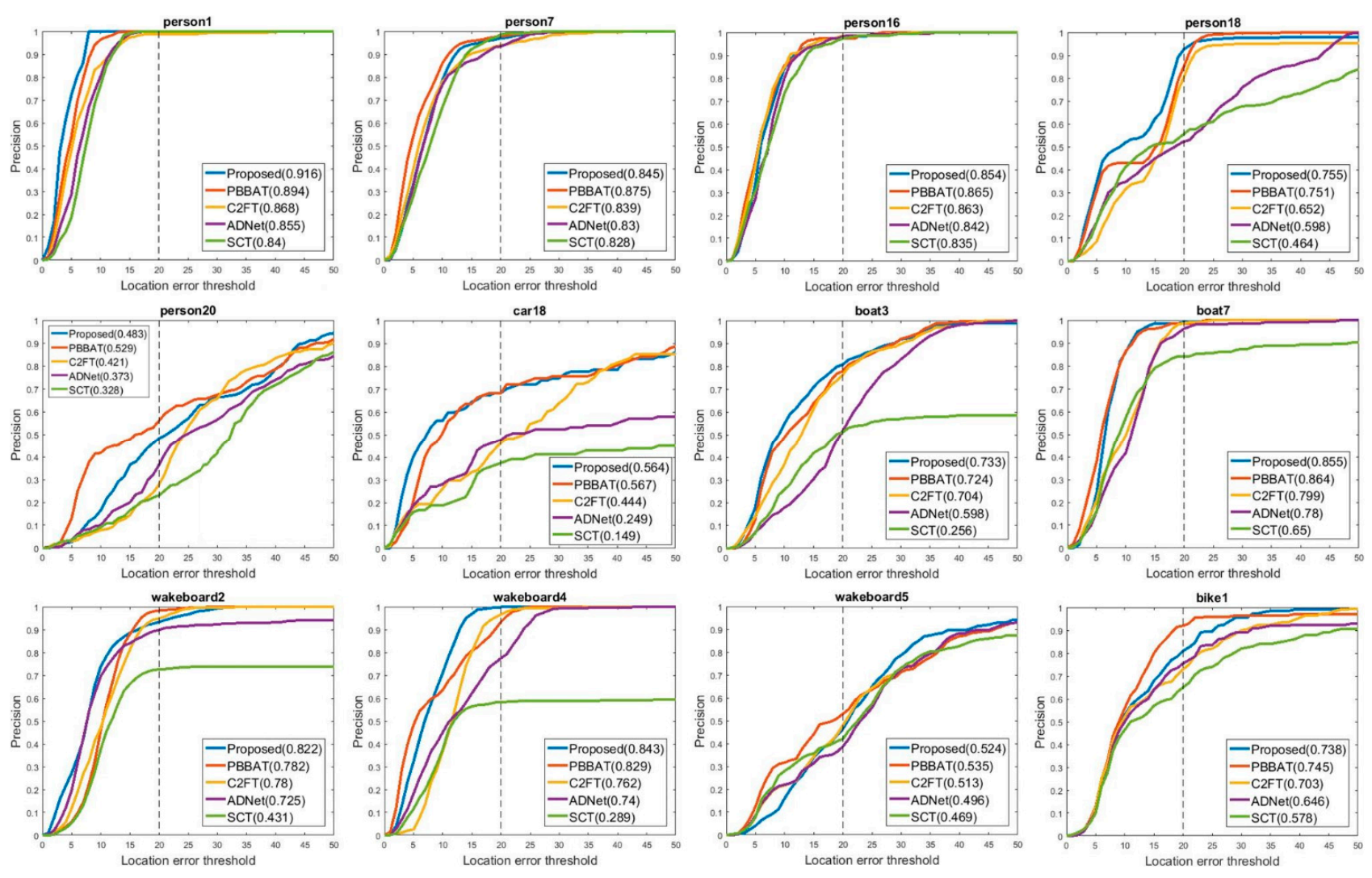
4.2. Algorithm Precision Assessment
4.3. Algorithm Speed Assessment
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Barmpounakis, E.N.; Vlahogianni, E.I.; Golias, J.C. Unmanned Aerial Aircraft Systems for transportation engineering: Current practice and future challenges. Int. J. Transp. Sci. Technol. 2016, 5, 111–122. [Google Scholar] [CrossRef]
- Chen, S.; Laefer, D.F.; Mangina, E.; Zolanvari, S.M.I.; Byrne, J. UAV bridge inspection through evaluated 3D reconstructions. J. Bridge Eng. 2019, 24, 5019001. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.A.; Ectors, W.; Bellemans, T.; Janssens, D.; Wets, G. Unmanned Aerial Vehicle-Based Traffic Analysis: A Case Study for Shockwave Identification and Flow Parameters Estimation at Signalized Intersections. Remote Sens. 2018, 10, 458. [Google Scholar] [CrossRef] [Green Version]
- Meng, F.; Li, M.; Wang, J.; Zhang, L.; Zhong, T.; Cong, Q.; An, Y. The Research of Oil Pipeline Patrol by UAV in the First Sub-Factory of PCOC. In Proceedings of the 7th International Conference on Education, Management, Information and Mechanical Engineering (EMIM 2017), Shenyang, China, 28–30 April 2017; pp. 610–614. [Google Scholar]
- Wang, W.; Huang, Y.; Wang, Y.; Wang, L. Generalized autoencoder: A neural network framework for dimensionality reduction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014; pp. 496–503. [Google Scholar]
- Vincent, P.; Larochelle, H.; Bengio, Y.; Manzagol, P.A. Extracting and composing robust features with denoising autoencoders. In Proceedings of the 25th International Conference on Machine Learning, New York, NY, USA, 5–9 July 2008; pp. 1096–1103. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; Volume 4, pp. 3104–3112. [Google Scholar]
- Luz, E.J.d.S.; Schwartz, W.R.; Cámara-Chávez, G.; Menotti, D. ECG-based heartbeat classification for arrhythmia detection: A survey. Comput. Methods Programs Biomed. 2016, 127, 144–164. [Google Scholar] [CrossRef] [PubMed]
- Gulli, A.; Pal, S. Deep Learning with Keras; Packt Publishing Ltd: Birmingham, UK, 2017; ISBN 1787129039. [Google Scholar]
- Wang, L.; Ouyang, W.; Wang, X.; Lu, H. Visual Tracking with Fully Convolutional Networks. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 11–18 December 2015; pp. 3119–3127. [Google Scholar]
- Ma, C.; Huang, J.; Yang, X.; Yang, M. Hierarchical Convolutional Features for Visual Tracking. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 11–18 December 2015; pp. 3074–3082. [Google Scholar]
- Zhang, K.; Liu, Q.; Wu, Y.; Yang, M. Robust Visual Tracking via Convolutional Networks Without Training. IEEE Trans. Image Process. 2016, 25, 1779–1792. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Song, K.; Rong, X.; Li, Y. Coarse-to-Fine UAV Target Tracking With Deep Reinforcement Learning. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1522–1530. [Google Scholar] [CrossRef]
- Zha, Y.; Wu, M.; Qiu, Z.; Sun, J.; Zhang, P.; Huang, W. Online semantic subspace learning with Siamese network for UAV tracking. Remote Sens. 2020, 12, 325. [Google Scholar] [CrossRef] [Green Version]
- Qi, Y.; Zhang, S.; Qin, L.; Yao, H.; Huang, Q.; Lim, J.; Yang, M.H. Hedged Deep Tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4303–4311. [Google Scholar]
- Fu, C.; Zhang, Y.; Huang, Z.; Duan, R.; Xie, Z. Part-Based Background-Aware Tracking for UAV with Convolutional Features. IEEE Access 2019, 7, 79997–80010. [Google Scholar] [CrossRef]
- Cui, Z.; Xiao, S.; Feng, J.; Yan, S. Recurrently target-attending tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1449–1458. [Google Scholar]
- Dai, K.; Zhang, Y.; Wang, D.; Li, J.; Lu, H.; Yang, X. High-Performance Long-Term Tracking with Meta-Updater. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 6297–6306. [Google Scholar]
- Yun, S.; Choi, J.; Yoo, Y.; Yun, K.; Choi, J.Y. Action-decision networks for visual tracking with deep reinforcement learning. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1349–1358. [Google Scholar]
- Teng, Z.; Xing, J.; Wang, Q.; Zhang, B.; Fan, J. Deep spatial and temporal network for robust visual object tracking. IEEE Trans. Image Process. 2020, 29, 1762–1775. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.; You, T.; Kwak, S.; Han, B. Online Tracking by Learning Discriminative Saliency Map with Convolutional Neural Network. In Proceedings of the 32nd International Conference on International Conference on Machine, Lille, France, 7–9 July 2015; pp. 597–606. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.S.; Felsberg, M. Learning Spatially Regularized Correlation Filters for Visual Tracking. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 11–18 December 2015; pp. 4310–4318. [Google Scholar]
- Fu, C.; Lin, F.; Li, Y.; Chen, G. Correlation filter-based visual tracking for UAV with Online multi-feature learning. Remote Sens. 2019, 11, 549. [Google Scholar] [CrossRef] [Green Version]
- Shi, W.; Wang, Y.; Wu, S. Robust UAV-Based tracking using hybrid classifiers. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 2129–2137. [Google Scholar]
- Silva, A.S.; Severgnini, F.M.Q.; Oliveira, M.L.; Mendes, V.M.S.; Peixoto, Z.M.A. Object Tracking by Color and Active Contour Models Segmentation. IEEE Latin Am. Trans. 2016, 14, 1488–1493. [Google Scholar] [CrossRef]
- Bharati, S.P.; Wu, Y.; Sui, Y.; Padgett, C.; Wang, G. Real-Time Obstacle Detection and Tracking for Sense-and-Avoid Mechanism in UAVs. IEEE Trans. Intell. Veh. 2018, 3, 185–197. [Google Scholar] [CrossRef]
- Choi, J.; Chang, H.J.; Jeong, J.; Demiris, Y.; Choi, J.Y. Visual Tracking Using Attention-Modulated Disintegration and Integration. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4321–4330. [Google Scholar]
- Fu, C.; Xu, J.; Lin, F.; Guo, F.; Liu, T.; Zhang, Z. Object Saliency-Aware Dual Regularized Correlation Filter for Real-Time Aerial Tracking. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8940–8951. [Google Scholar] [CrossRef]
- Li, F.; Fu, C.; Lin, F.; Li, Y.; Lu, P. Training-Set Distillation for Real-Time UAV Object Tracking. In Proceedings of the IEEE International Conference on Robotics and Automation, Paris, France, 31 May–31 August 2020; pp. 9715–9721. [Google Scholar]
- Yu, M.; Zhang, Y.; Li, Y.; Lin, Z.L.; Li, J.; Wang, C. Saliency guided visual tracking via correlation filter with log-gabor filter. IEEE Access 2020, 8, 158184–158196. [Google Scholar] [CrossRef]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum Likelihood from Incomplete Data via the EM Algorithm. J. R. Stat. Soc. Ser. B 1977, 39, 1–38. [Google Scholar]
- Lin, H.H.; Chuang, J.H.; Liu, T.L. Regularized background adaptation: A novel learning rate control scheme for gaussian mixture modeling. IEEE Trans. Image Process. 2011, 20, 822–836. [Google Scholar] [PubMed]
- Mueller, M.; Smith, N.; Ghanem, B. A Benchmark and Simulator for UAV Tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; pp. 445–461. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.H. Online object tracking: A benchmark. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 2411–2418. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generic Method | Deep Learning Based | ||||
|---|---|---|---|---|---|
| Pattern | Proposed | SCT [29] | C2FT [14] | PBBAT [17] | ADNet [20] |
| Person1 | 0.916 | 0.830 | 0.868 | 0.894 | 0.855 |
| Person7 | 0.845 | 0.828 | 0.839 | 0.875 | 0.830 |
| Person16 | 0.854 | 0.835 | 0.863 | 0.865 | 0.842 |
| Person18 | 0.755 | 0.464 | 0.652 | 0.751 | 0.598 |
| Person20 | 0.483 | 0.328 | 0.421 | 0.529 | 0.373 |
| Car18 | 0.564 | 0.149 | 0.444 | 0.567 | 0.249 |
| Boat3 | 0.733 | 0.256 | 0.704 | 0.724 | 0.598 |
| Boat7 | 0.855 | 0.650 | 0.799 | 0.864 | 0.780 |
| Wakeboard2 | 0.822 | 0.431 | 0.780 | 0.782 | 0.725 |
| Wakeboard4 | 0.843 | 0.289 | 0.762 | 0.829 | 0.740 |
| Wakeboard5 | 0.524 | 0.469 | 0.513 | 0.535 | 0.496 |
| Bike1 | 0.738 | 0.579 | 0.703 | 0.745 | 0.646 |
| Average | 0.744 | 0.509 | 0.695 | 0.746 | 0.644 |
| Generic Method | Deep Learning-Based | ||||
|---|---|---|---|---|---|
| Pattern | Proposed | SCT [29] | C2FT [14] | PBBAT [17] | ADNet [20] |
| Person1 | 0.821 | 0.762 | 0.633 | 0.810 | 0.697 |
| Person7 | 0.589 | 0.512 | 0.575 | 0.655 | 0.585 |
| Person16 | 0.844 | 0.814 | 0.845 | 0.846 | 0.840 |
| Person18 | 0.531 | 0.418 | 0.348 | 0.498 | 0.419 |
| Person20 | 0.514 | 0.394 | 0.464 | 0.539 | 0.498 |
| Car18 | 0.709 | 0.469 | 0.507 | 0.748 | 0.542 |
| Boat3 | 0.571 | 0.177 | 0.484 | 0.569 | 0.488 |
| Boat7 | 0.674 | 0.356 | 0.587 | 0.630 | 0.585 |
| Wakeboard2 | 0.518 | 0.315 | 0.395 | 0.511 | 0.429 |
| Wakeboard4 | 0.607 | 0.202 | 0.538 | 0.579 | 0.509 |
| Wakeboard5 | 0.559 | 0.518 | 0.543 | 0.543 | 0.511 |
| Bike1 | 0.728 | 0.696 | 0.695 | 0.725 | 0.665 |
| Average | 0.638 | 0.469 | 0.551 | 0.637 | 0.564 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheu, M.-H.; Jhang, Y.-S.; Morsalin, S.M.S.; Huang, Y.-F.; Sun, C.-C.; Lai, S.-C. UAV Object Tracking Application Based on Patch Color Group Feature on Embedded System. Electronics 2021, 10, 1864. https://doi.org/10.3390/electronics10151864
Sheu M-H, Jhang Y-S, Morsalin SMS, Huang Y-F, Sun C-C, Lai S-C. UAV Object Tracking Application Based on Patch Color Group Feature on Embedded System. Electronics. 2021; 10(15):1864. https://doi.org/10.3390/electronics10151864
Chicago/Turabian StyleSheu, Ming-Hwa, Yu-Syuan Jhang, S M Salahuddin Morsalin, Yao-Fong Huang, Chi-Chia Sun, and Shin-Chi Lai. 2021. "UAV Object Tracking Application Based on Patch Color Group Feature on Embedded System" Electronics 10, no. 15: 1864. https://doi.org/10.3390/electronics10151864
APA StyleSheu, M. -H., Jhang, Y. -S., Morsalin, S. M. S., Huang, Y. -F., Sun, C. -C., & Lai, S. -C. (2021). UAV Object Tracking Application Based on Patch Color Group Feature on Embedded System. Electronics, 10(15), 1864. https://doi.org/10.3390/electronics10151864