1. Introduction
Low-energy electron accelerators have been widely adopted in the fields of material modification, environmental protection, treatment, coating curing, etc. [
1,
2,
3]. Compared with other types of electron accelerators for industrial irradiation applications, insulated core transformers (ICTs) have the outstanding advantage of high energy conversion efficiency. The performance of an electron accelerator largely depends on the high-voltage power supply.
Recently, ICT high-voltage power supply involved in attention due to high-power density. In 2009, KSI Corp. developed a novel ICT of 750 kV/100 mA [
4]. In 2011, a planar ICT was designed by the Chinese Academy of Sciences, and the capacitor compensation technique is adopted [
5]. Since 2012, compensation methods [
6,
7] and equivalent circuit models [
8,
9,
10] have been developed at Huazhong University of Science and Technology.
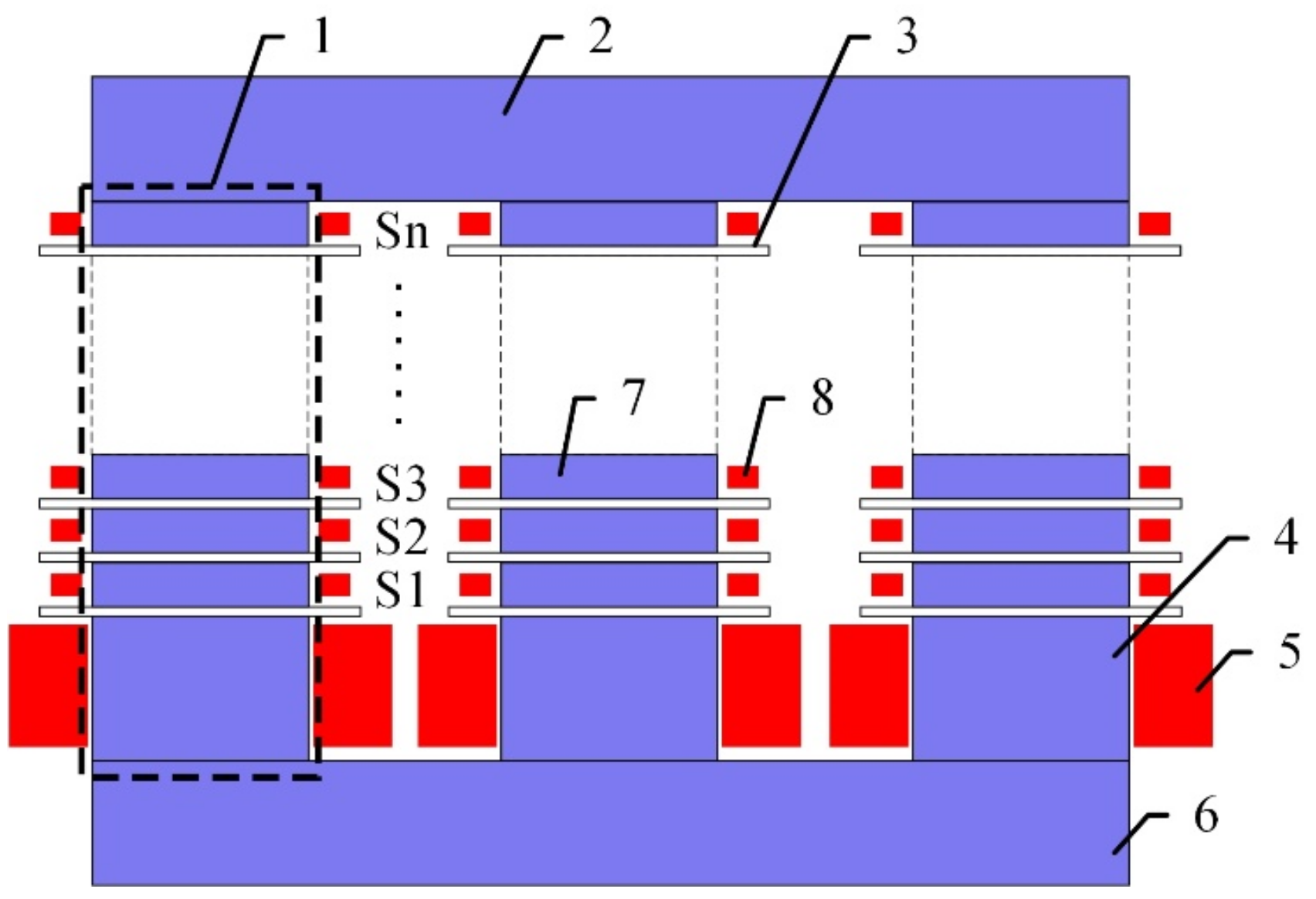
The plane schematic diagram of a three-phase ICT is presented in
Figure 1. It contains three core columns, which consist of a primary core wrapped with a primary winding and multi-secondary cores wrapped with multi-secondary windings. Insulation sheets are inserted between the cores [
11]. Each core is electrically connected to the corresponding winding to achieve equipotential, and each of the three secondary windings in the same disk is connected to a DC voltage doubler. The three doubler units in the same disk are connected in series; this output DC voltage is called the disk output voltage. Each disk is surrounded by a grading ring, which is intended to distribute the electric field evenly. Finally, all disks are connected in series to obtain the high output voltage of the ICT high-voltage power supply [
7]. The ICT and the high-voltage electrode on top of it are placed into a tank filled with approximately 0.6 Mpa sulfur hexafluoride gas.
The insulation sheets are usually made of Teflon, mica, etc., for which the magnetic permeability is much smaller than that of electrical steel. Significant magnetic flux leakage is produced by the insulation sheets of ICTs [
9,
12]. The leakage flux gradually increases from the bottom to the top disk [
6,
13]. The output voltage of disks is proportional to the working frequency, the flux amplitude, and the number of secondary winding turns. The different output voltages of the disks cause electric potential differences among the disks. On the one hand, the induced voltages of the secondary windings on different disks are different, which results in higher design and manufacturing costs. On the other hand, a permanently damaging electric breakdown tends to occur on insulating sheets between adjacent disks that have a large electric potential difference.
Increasing the number of secondary winding turns is commonly used to ensure that the disks’ output voltage is as consistent as possible. To facilitate the description of the consistency of the disks’ output voltage, the concept of maximum non-uniformity is introduced. The maximum non-uniformity of the disks’ output voltage can be used to describe the distribution of the output voltage of all disks, indicating the possibility of high voltage breakdown. It can be defined as:
where
σ0 and
σ1 represent the maximum non-uniformity of disk output voltage under no-load conditions and full load conditions, respectively;
VSj represents the output voltage of the
j-th disk
Sj,
j ≤
n; and n represents the number of disks.
Often, the upper secondary windings require an additional number of turns, which increases the output impedance. Eventually, this leads to a greater load regulation of the upper disks than the lower disks. Load regulation describes the change in the output voltage from no-load to a full load, which can be expressed by Formula (2):
where
LR represents the load regulation, and
Vno-load and
Vfullload represent the output high voltage under no-load conditions and full load conditions, respectively.
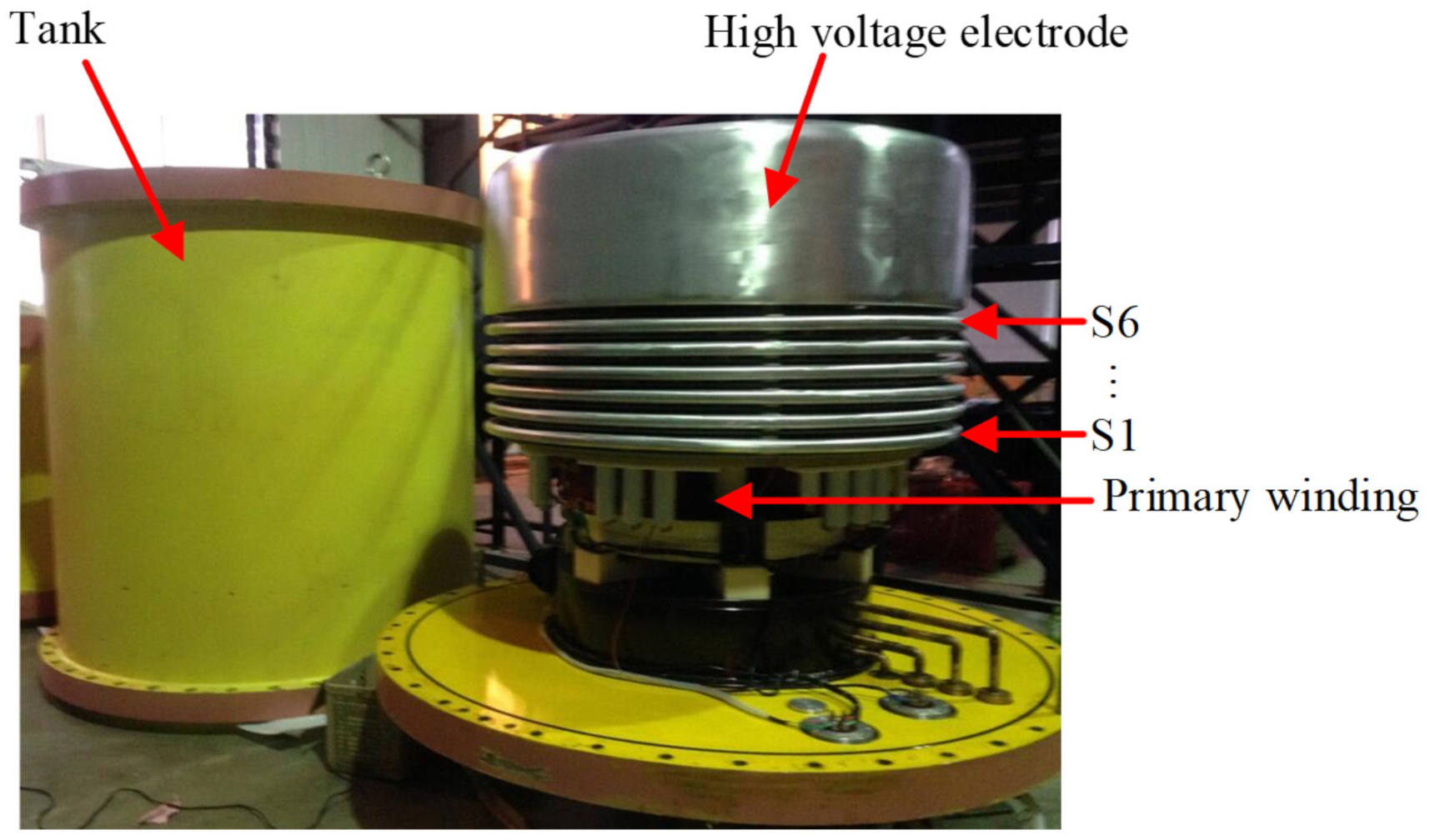
The differing load regulation of disks creates more challenges in selecting an appropriate number of secondary winding turns. We developed a 200 kV/20 mA HUST-ICT prototype, and
Figure 2 shows the equipment during installation at Huazhong University of Science and Technology. The conversion efficiency of the HUST-ICT was up to 86%. The number of secondary winding turns
(N
S1, N
S2, …, N
S6) was 2736, 3080, 3400, 3671, 3863, and 3974.
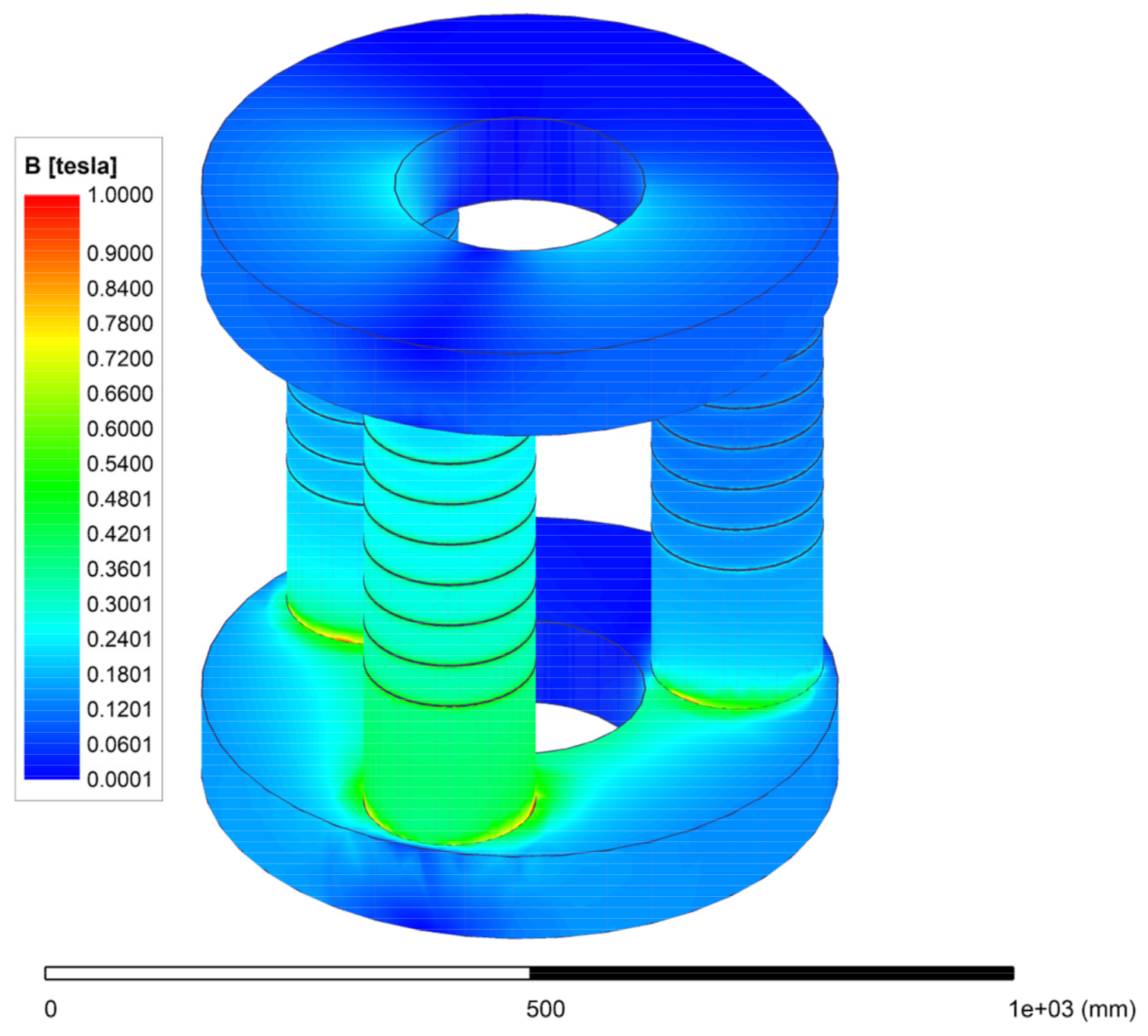
The output voltage of the disk was tested in an atmospheric insulated environment with a high voltage of 20 kV under no- load.
Figure 3 shows the output voltage of each disk, which was approximately 3.5 kV. The maximum error between the simulation results obtained via the finite-element method (FEM) and the experimental data was less than 5.5%. Because measurement of the output voltage of the disks was not possible under 200 kV operating conditions, the 3D FEM model and a circuit model of the HUST-ICT were built and examined with Ansys software and the MATLAB/Simulink environment, respectively. The distribution of the magnetic flux density in the 3D FEM model is shown in
Figure 4.
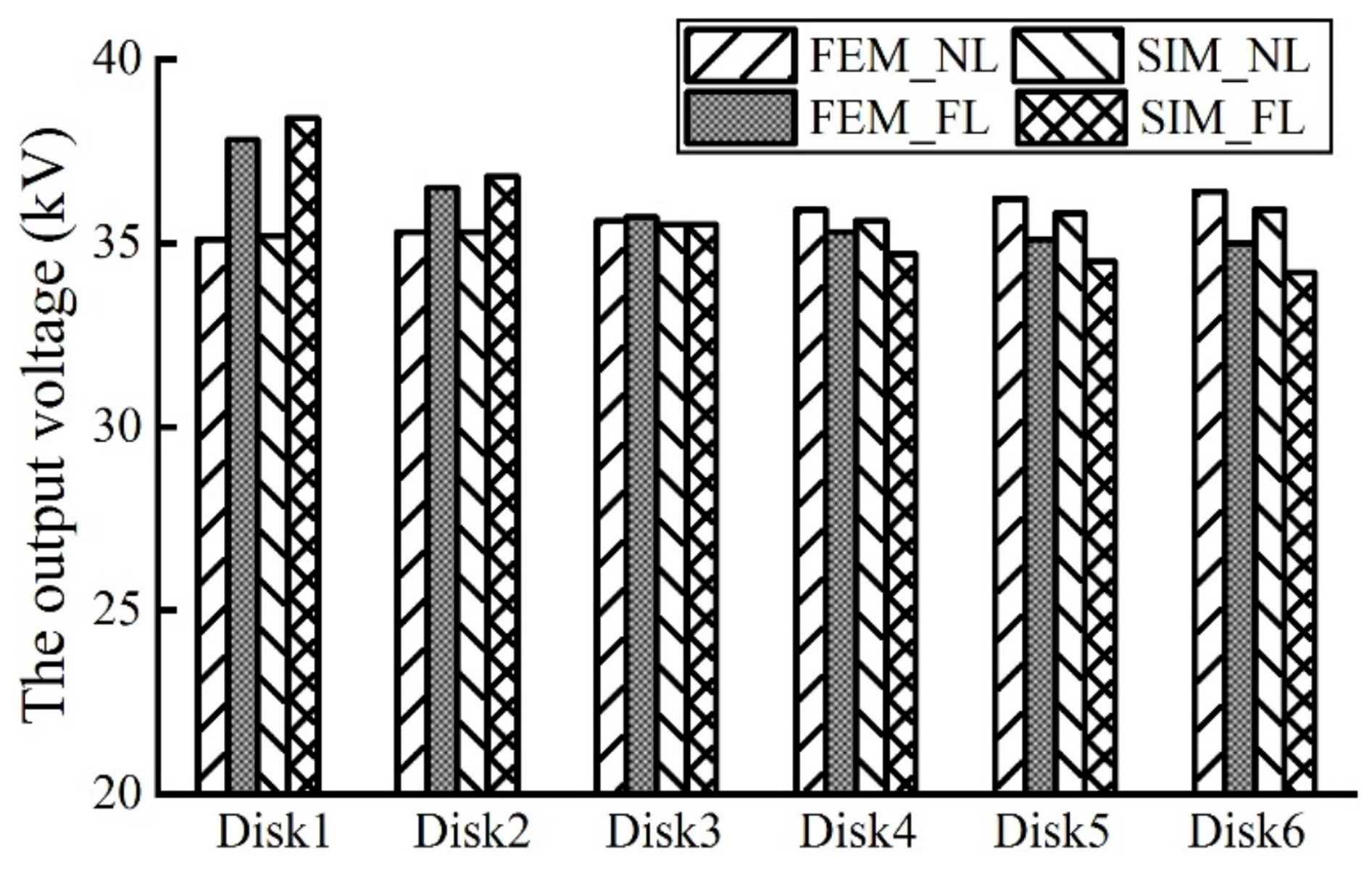
Figure 5 shows the results of the two simulation methods when the HUST-ICT was working at 200 kV with no- load and a full load. These results also match the experimental data when the accelerator was working at 200 kV/20 mA. The maximum error between the simulation results obtained via the FEM and the simulated circuit was less than 2.5%. Therefore, the FEM simulation model was considered to be reliable.
σ0 was 3.5% and σ1 was 11.1% based on the FEM simulation model. Although the non-uniformity of the disk output voltage was small under no-load, it was larger under a full load. Usually, both σ0 and σ1 are expected to be less than 10% to ensure reliable operation in industrial production systems. The LR of the HUST-ICT was 14.3%. The smaller the load regulation, the better the performance of the ICT high-voltage power supply. Notably, σ and LR did not meet expectations. Several electric breakdowns occurred on the insulation sheets.
In addition, a significant amount of time can be spent on the design of the number of secondary turns with manual iterative optimization, which mainly relies on the designer’s experience. The design of an ICT contains many parameters, which interact with the transients. As a result, the manual optimization process is complex, and the result is frequently not an optimal solution for this problem.
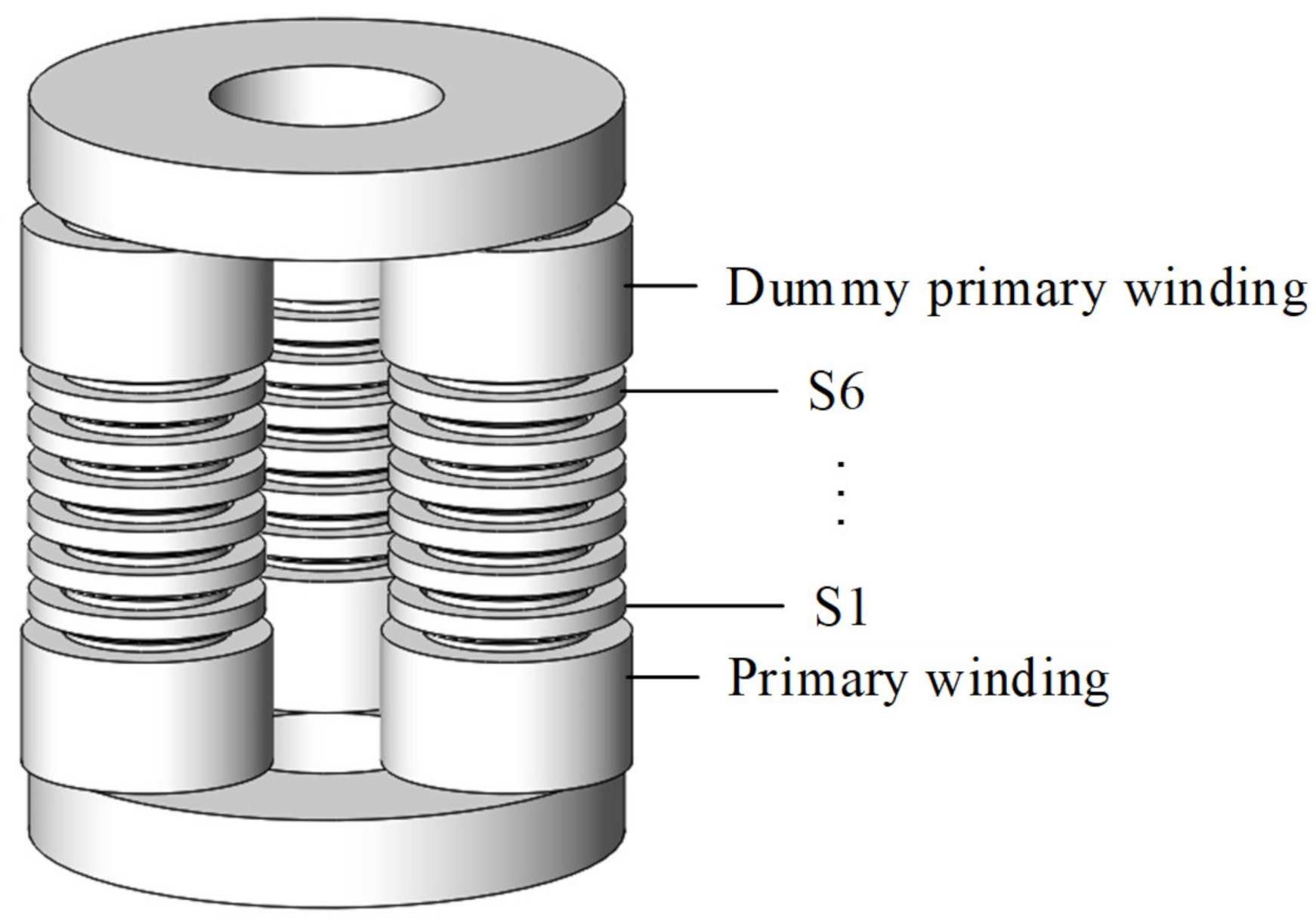
Methods of optimizing and improving the prototype are currently being studied. On the one hand, adding a dummy primary winding is an interesting method [
7]. Dummy primary winding produces a greater excitation effect on the upper secondary windings than on the lower ones. It creates a complementary effect with the primary winding and helps to improve the uniformity of the disks’ output voltage. On the other hand, artificial intelligence algorithms can be used to optimize the design parameters of an ICT. The PSO algorithm is a metaheuristic algorithm, which was developed by Kennedy and Eberhart in 1995 [
14]. In comparison with other algorithms (GA, ACO, ABC, GSO, SA, etc.), the major advantages of PSO include fewer control parameters, high efficiency, fast convergence, and little dependence on the initial value [
15]. It has been successfully applied to both continuous and discrete optimization problems. More recently, the PSO algorithm has solved many complex scientific research and engineering application problems [
16,
17,
18,
19].
In the light of the discussion above, the design parameters of an insulated core transformer with a dummy primary winding (DICT) were optimized based on the PSO algorithm in this research. The remaining parts of this study are organized as follows.
The structure of the DICT is introduced and the parameters are calculated analytically in
Section 2. The optimization methods based on PSO are described in
Section 3. The method is presented as an example of a 200 kV/20 mA DICT in
Section 4. The results are analyzed and discussed in
Section 5.
Section 6 concludes this paper.
3. Optimization Method for the Design Parameters of the DICT Based on PSO
The parameters of the DICT to be optimized included the number of secondary winding turns (NS1, NS2, …, NSn) and the compensation capacitance (Ccom). Obviously, this is a multi-parameter optimization problem in a typical engineering application.
The PSO algorithm mimics the foraging behavior of certain birds or other animals, which find food through their knowledge and learning from the experiences of others, there are no leaders among them. The PSO is similar to the genetic algorithm (GA) in that the system is initialized by a population of randomized solutions. Compared with the GA, each potential solution in the PSO has a random velocity, and these potential solutions are particles flying in a multi-dimensional space. They adjust their flight speed dynamically according to the individual cognitive ability and the social cognition ability (from the experience of their peers), which form positive feedback for group optimization. Each particle records its coordinates (position) associated with the best solution (the maximum or minimum value of the target function) that it has achieved so far in the search space. This value is called pbest. Meanwhile, the best solution of all particles is also recorded, this value is called gbest [
22]. Next, pbest and gbest are updated through each iteration step. Specifically, at the
k-th iteration, the speed and position of the
i-th particle are updated through dimension
d according to the following Equations [
15]:
where
c1 is the learning coefficient for individual ability and
c2 is the learning coefficient for social ability. Usually,
c1 and
c2 are taken as 2. Moreover,
r1 and
r2 are uniform random numbers between 0 and 1,
d represents the dimension, and
w is the inertia weight, which plays an important role in balancing the global search and the local search, since it directly affects the convergence of the objective function. It helps to reduce interactions by using a decreasing inertia weight.
The PSO algorithm is ideal for solving multi-parameter optimization problems by constructing an objective function and converting the multiple parameters to be solved into a multi-dimensional solution space. In this study, the objective function involved σ0, σ1, and LR.
The position of the particle is a variable vector X = [x1, x2, …, xm] that indicates the solution of the problem to be optimized for a swarm with m particles. The merit of the position for each particle depends on the objective function.
Combined with the design processes of the DICT, the PSO-based method is summarized in the following steps:
Select the material of the insulating sheets, the rectifier elements, and the working magnetic flux density based on the minimum power loss and the size of the structure of the DICT, and calculate the rough value of Ccom and NS1, NS2, …, NSn according to Equations (6) and (8);
Calculate the mutual inductance matrix with the FEM magnetostatic model of the DICT;
Generate an initial swarm with positions (xi) and velocities (vi). Take a range of values for each particle based on the previous calculations of NS1, NS2, …, NSn, and Ccom;
Establish the objective function and obtain the personal best value pbest and the global best value gbest so far. VS1_NL, VS2_NL, …, VSn_NL are calculated by analytical formulae. Meanwhile, VS1_FL, VS2_FL, …, VSn_FL are obtained by the MATLAB codes and the Simulink circuit under full load conditions. Thus, σ0, σ1 and LR can be calculated by Formulas (1) and (2);
Update the personal best value pbest and the global best value gbest, and update the position and velocity of each particle via Equations (9) and (10) to obtain a new set of design parameters;
Assess the objective function and find the best fitness value so far;
Update the swarm, and repeat Steps 4, 5, and 6;
Repeat Steps 4, 5, 6, and 7 until the end condition is met;
Output the optimized parameters of the DICT (NS1, NS2, …, NSn, Ccom) and the output voltage of disks (VS1_NL, VS2_NL, …, VSn_NL, VS1_FL, VS2_FL, …, VSn_FL), and calculate σ0, σ1, and LR;
Import the optimized parameters into the FEM couple-circuit transient model of the DICT to verify the output voltage of the disks.
A flowchart of the design parameters of a DICT based on PSO is shown in
Figure 7.
4. An Example of a 200 kV/20 mA DICT
Based on the experience of the prototype, the fill factor of the core was about 95%, and the core material was Nippon steel of 27zh95, the BH curve for which is shown in
Figure 8. The material of windings is copper and the windings are modelled using uniform multi-turn coils. At the same time, sufficient space needs to be considered for coil interleaving and interlayer insulation. The doubling rectifier circuit is the same as in [
6], expect that the capacitor is set to 0.2 μF. The smaller capacitor helps to reduce stored energy and increase the reliability of the ICT. The mutual inductance matrix can be obtained with the FEM magnetostatic model. The design parameters were optimized by the method described in
Section 3.
The working magnetic flux density was about 0.5 T, which is much lower than the saturation value, except for the corners. As a consequence, it can be described by a linear transformer model [
8]. The compensation capacitance
Ccom was 213 μF, and the number of secondary winding turns (N
S1, N
S2, …, N
S6) was 1997, 2097, 2146, 2146, 2097, and 1997, respectively, according to Equations (6) and (8). For simplicity, the dummy primary winding was assumed to be the same size as the primary windings. N
p’ was the same as N
p: they were both 92 turns, and N
S1 was 2000 turns, based on the preliminary design.
4.1. Initialization
Depending on the design, the number of secondary winding turns is determined to be in the range of 1500–4000, and the compensation capacitance is taken in the range of 100–300 μF. Any phase of the ICT with a symmetric structure contains sufficient mutual inductance information. The problem has six dimensions with solution variables (N
S2, N
S3, …, N
S6,
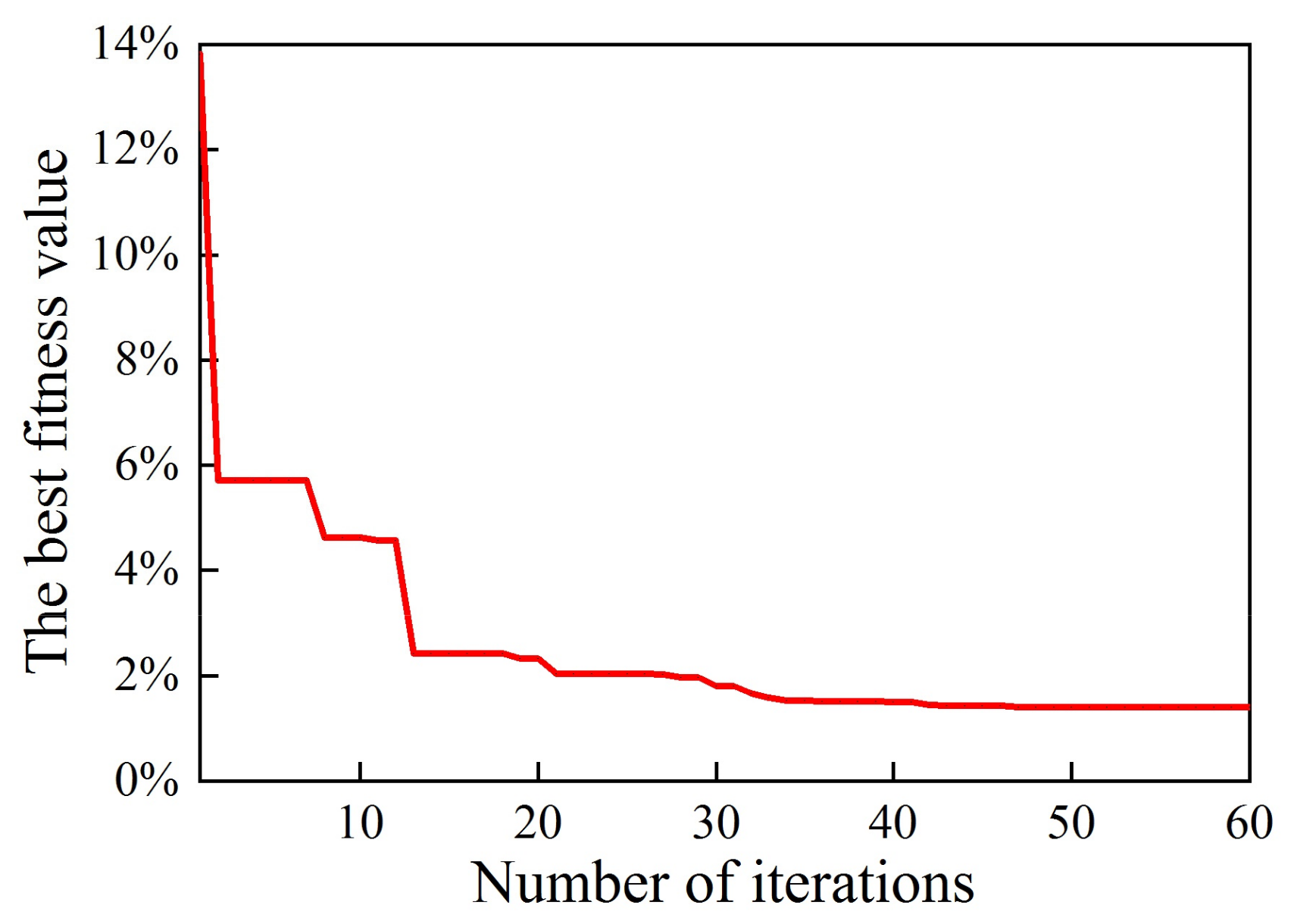
Ccom). The dynamic inertia weight w is in the range of 0.4–0.95, and a linear reduction was carried out by Equation (11) during the training. The population size was set to 100, and the maximum number of iterations was set to 60.
where
ws and
we represent the initial value and the end value of inertia weight, respectively.
MaxIt represents the maximum number of iterations; and It represents the current number of iterations.
4.2. The Objective Function
The non-uniformity of the disks’ output voltage and load regulation are the main factors to be considered; hence, the objective function consists of these two factors. The objective function is established with the non-uniformity of the disks’ output voltage and load regulation, which can be set as in Equation (12):
where
ω1 and
ω2 represent the weights of non-uniformity and load regulation, respectively. Because the non-uniformity is a more important indicator affecting an ICT’s performance, the weight factor
ω1 was set to 1, and
ω2 was set to 0.3, based on the experience of the designer.
5. Results
The convergence curve of the PSO algorithm is shown in
Figure 9, and the optimized design parameters are listed in
Table 2. The results of the FEM model are in good agreement with the results of MATLAB/Simulink.
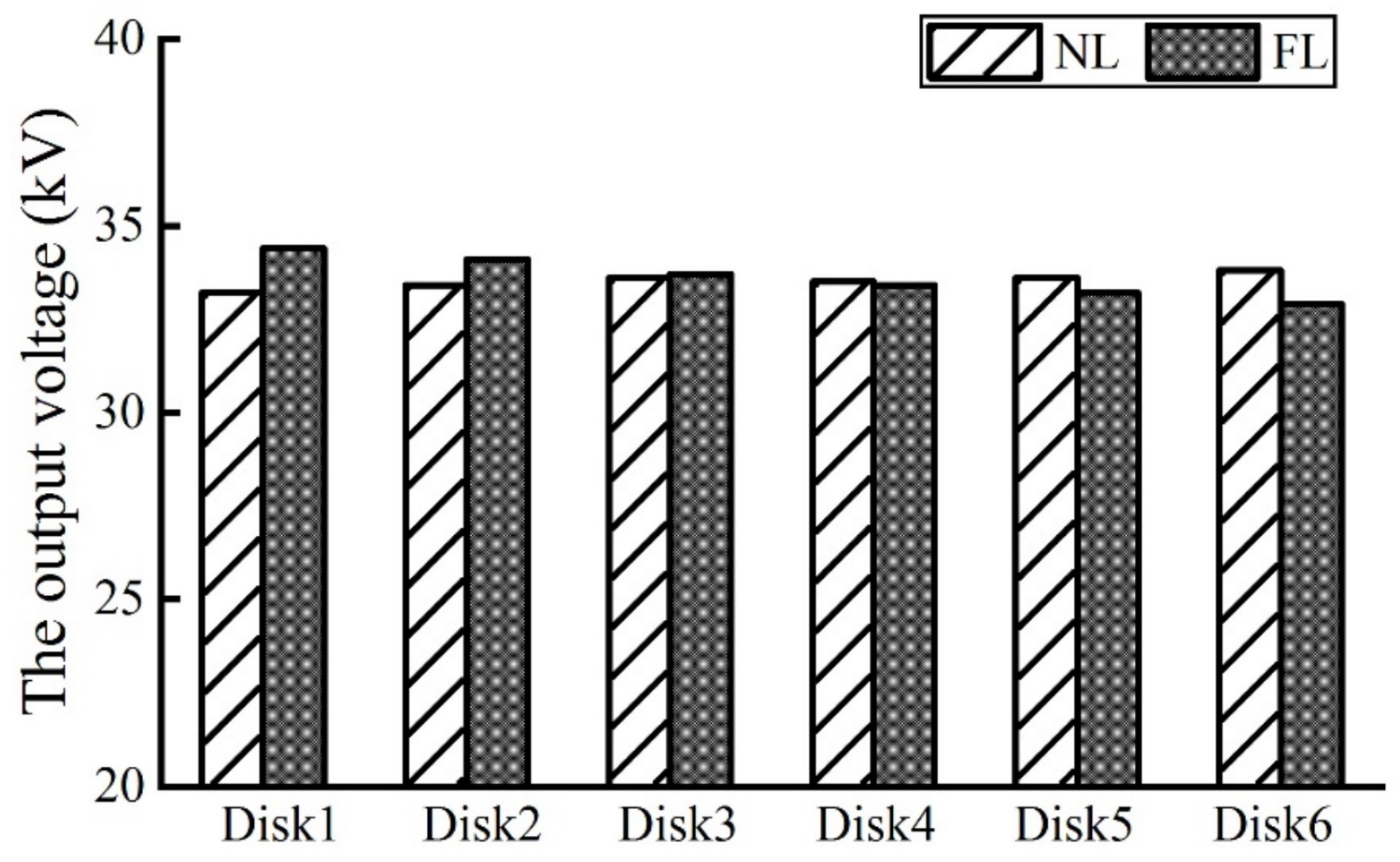
The distributions of the disks’ output voltage after all the tests and optimizations with different types under no- load and a full load by FEM simulation are shown in
Figure 10. The distribution of the magnetic flux density in the 3D FEM model of the DICT is shown in
Figure 11. A comparison of the distribution of the magnetic flux density in the central axis of the A-phase core column between the HUST-ICT and the DICT is shown in
Figure 12. Compared with
Figure 4, the uniformity of the magnetic flux density distribution of ICT has been significantly improved.
The results based on PSO show that both σ
0 and σ
1 were less than 1.5%. However, σ tended to be larger in the FEM model, especially σ
1. The difference between the two simulation methods can be attributed to a minor current phase shift in the dummy primary windings. Compared with the circuit simulation model, the FEM model is more reliable. Therefore, the final results based on the FEM simulation are presented in
Table 3. In comparison with the HUST-ICT under 200 kV/20 mA, the DICT has obvious advantages over ICT. The non-uniformity of the disks’ output voltage decreases, from 3.5% to 1.9% under no-load and from 11.1% to 4.4% under a full load. Moreover, the load regulation is greatly reduced to 9.6%.
In addition, the PSO method takes only a few hours, whereas the manual optimization method takes several days or even weeks. In summary, the PSO method proved to be far superior to the manual optimization method.
The number of secondary winding turns was greatly reduced, especially for secondary windings in the upper disks. Moreover, the number of winding turns had a roughly symmetrical distribution, which reduced the number of winding specifications. As a result, this suggested higher feasibility for the project’s implementation.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}