
Terminal Synergetic Control for Direct Active and Reactive Powers in Asynchronous Generator-Based Dual-Rotor Wind Power Systems



Abstract
:1. Introduction
- Terminal SC technique improves the dynamic response of the ASG-DRWP system.
- The proposed method offers very good transient performance compared to the classical method.
- Terminal synergetic control-based power control is more robust to parameters variation and external load disturbances.
- The proposed strategy is more simple algorithms.
2. DRWP Model
3. ASG Model
4. Terminal Synergetic Control
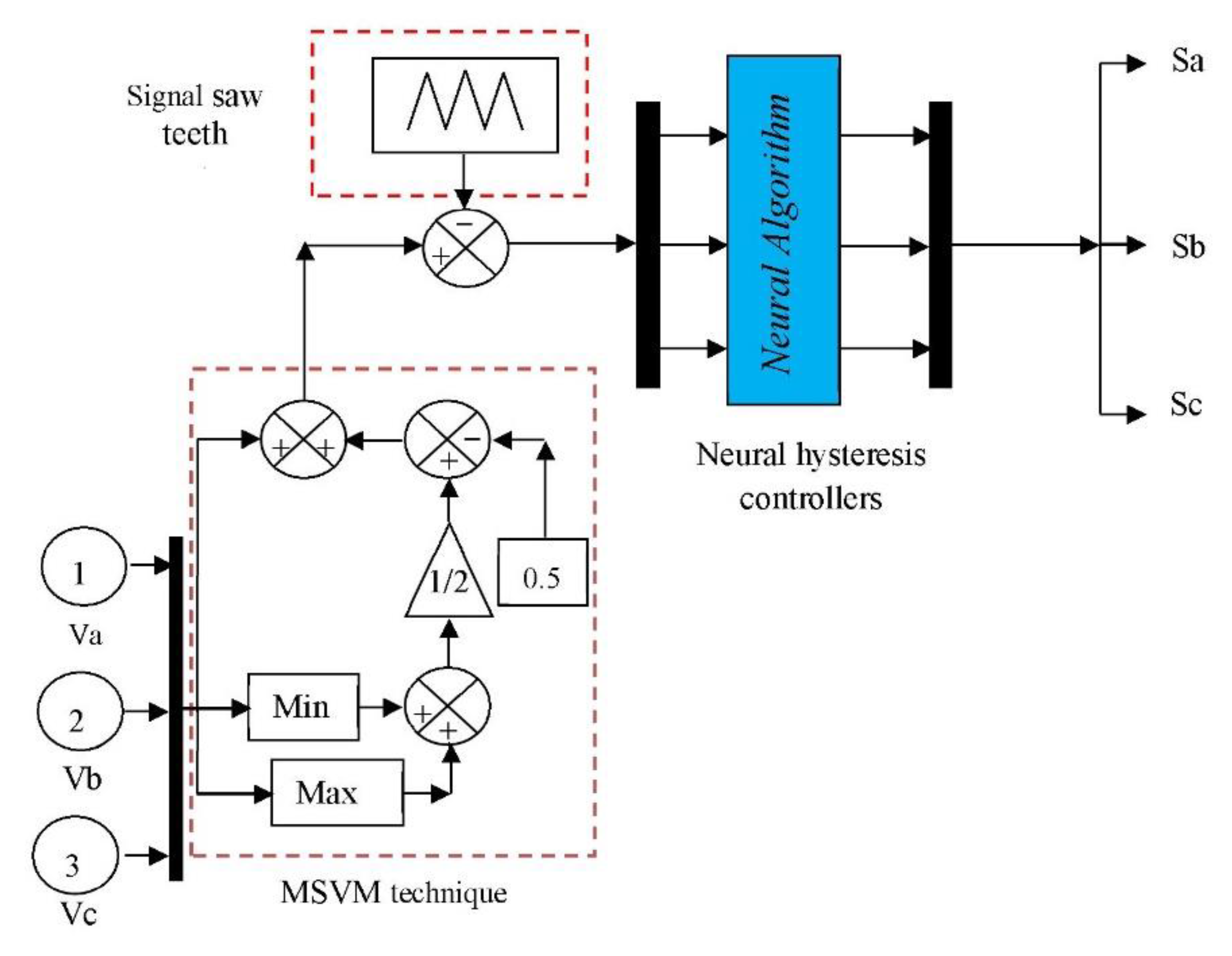
5. Modified SVM Technique
- This modulation strategy is valid for all kinds of multilevel inverters.
- It directly controls the three phases of the inverter.
- The output current has a very low ripple
- The physical implementation is relatively simple.
- Step 1: calculate Min of three-phase voltages;
- Step 2: calculate Max of three-phase voltages;
- Step 3: calculate the sum of Min (V1, V2 and V3) and Max (V1, V2 and V3), where V1, V2 and V3 are the phase voltages;
- Step 4: generation of the Sa, Sb and Sc pulse series.
6. Terminal Synergetic Active and Reactive Powers Control
6.1. Design Terminal Synergetic Active and Reactive Powers
6.2. Design of Neural MSVM Technique
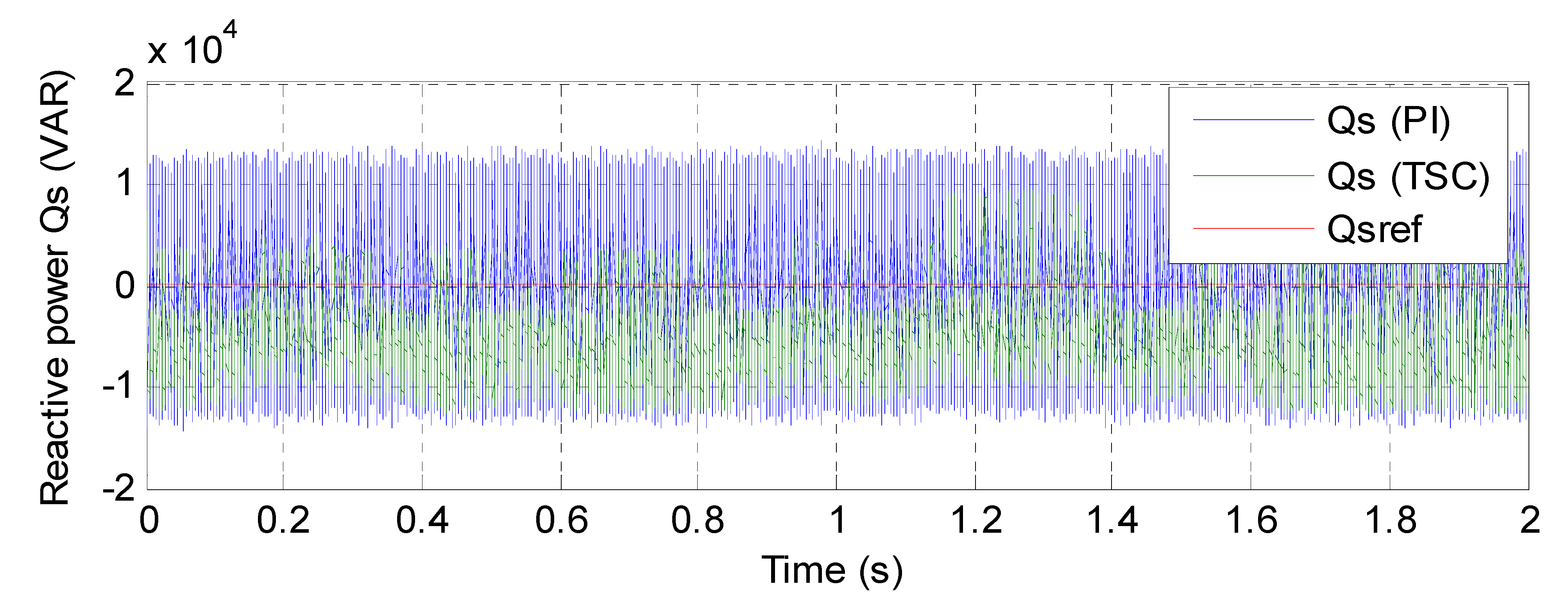
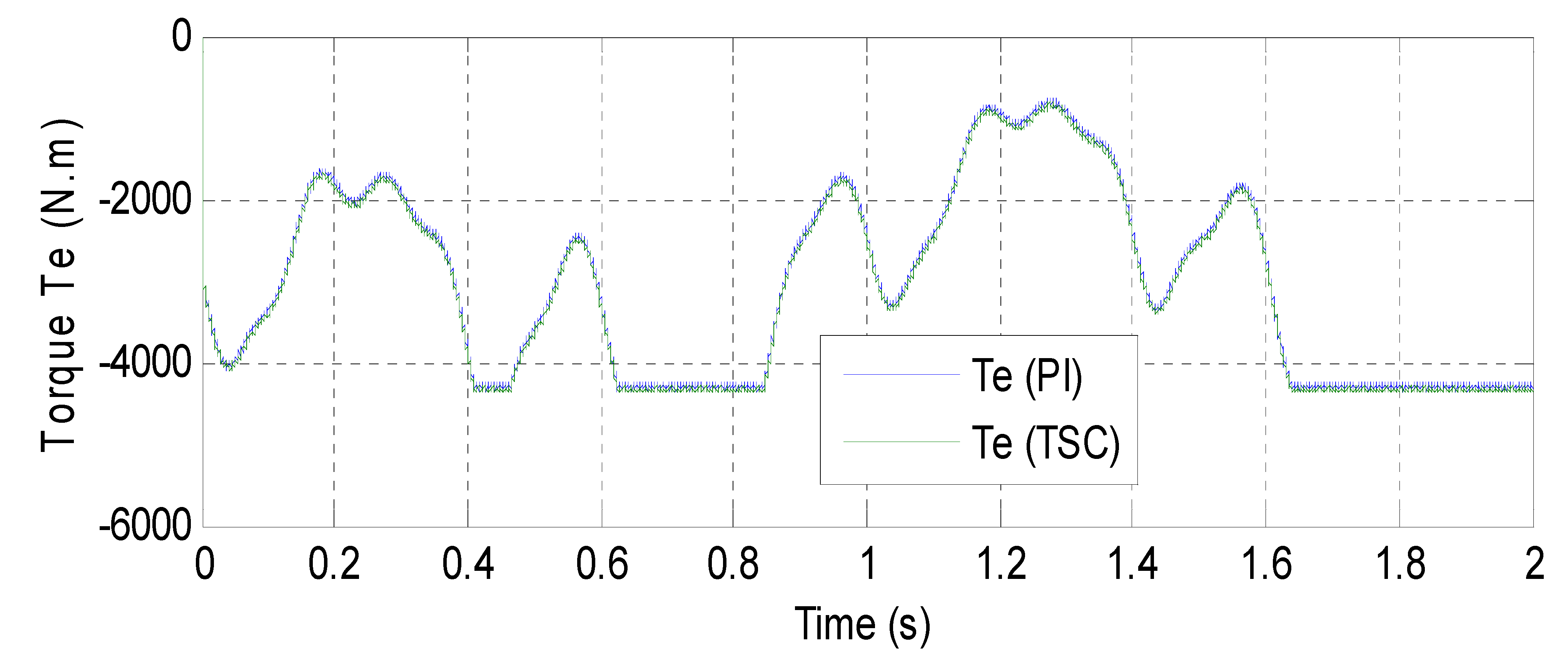
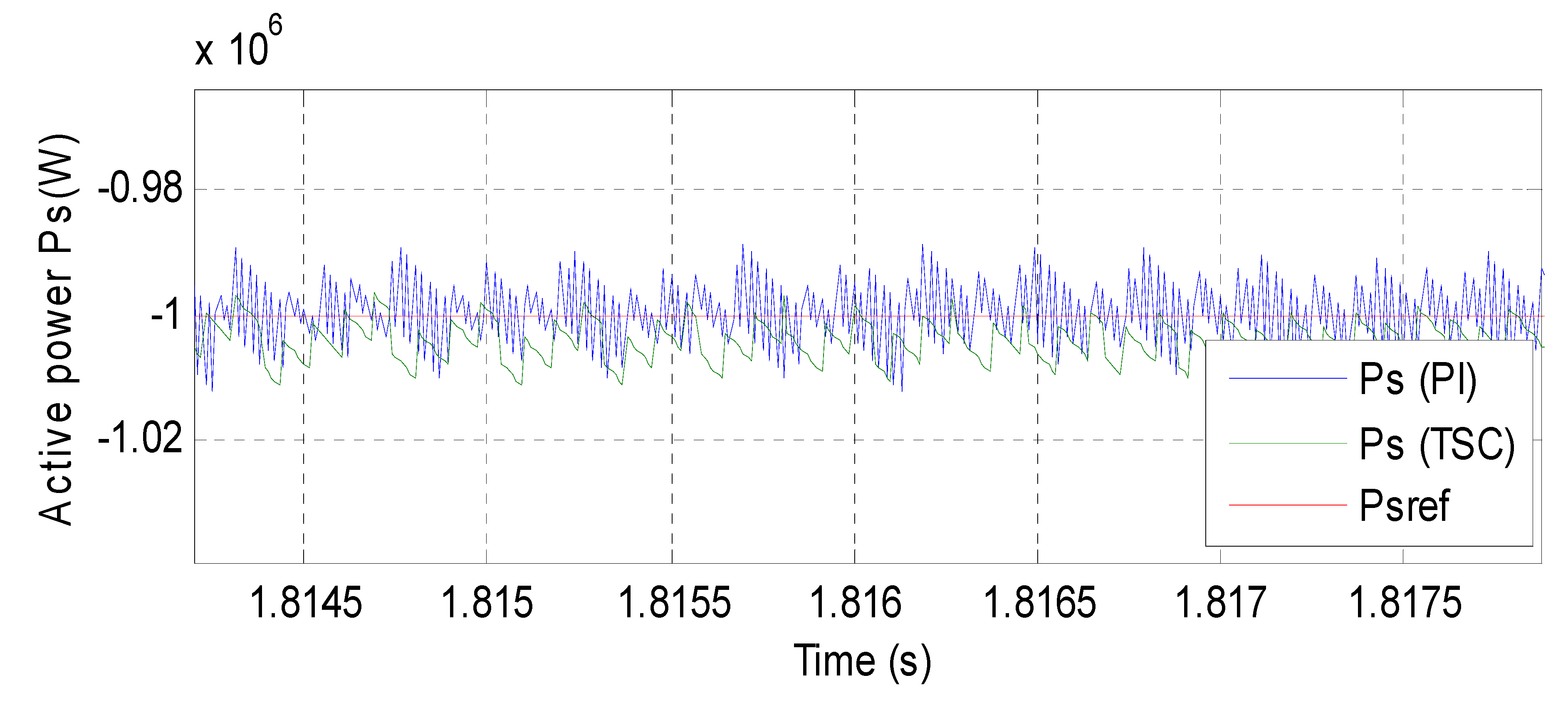
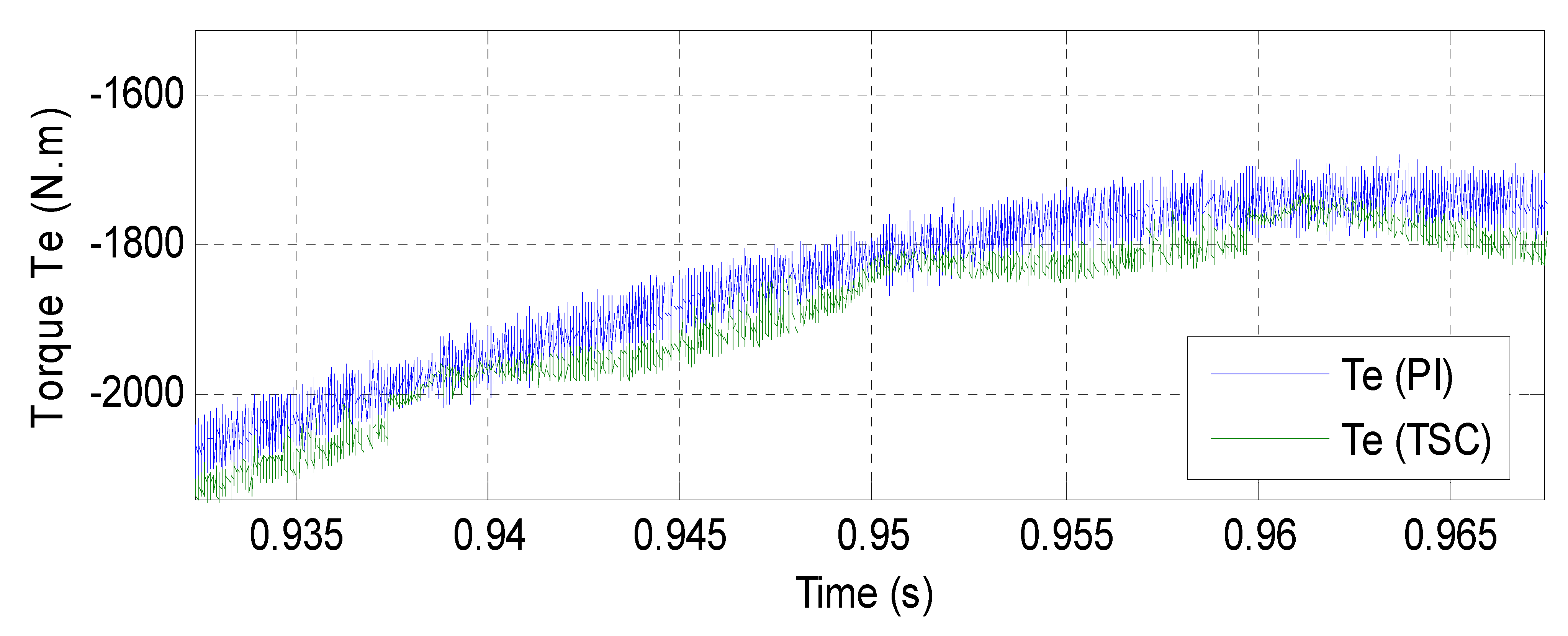
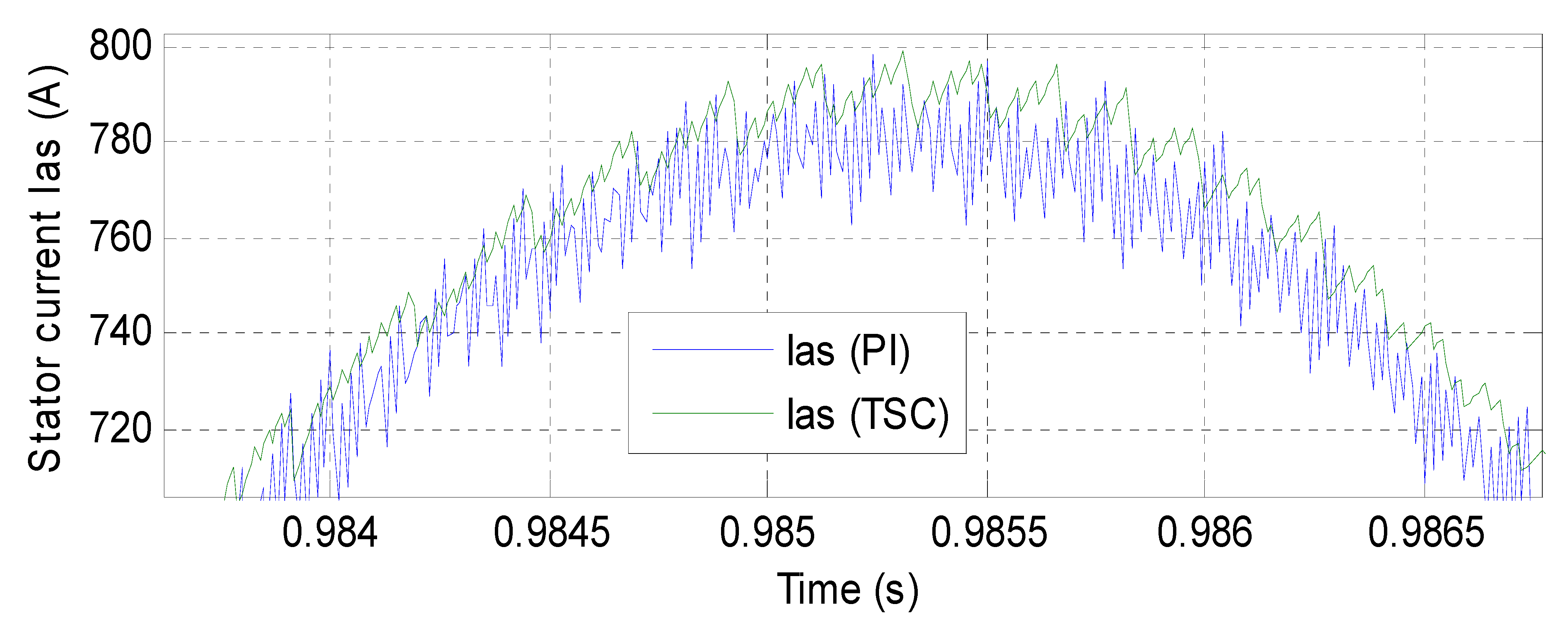
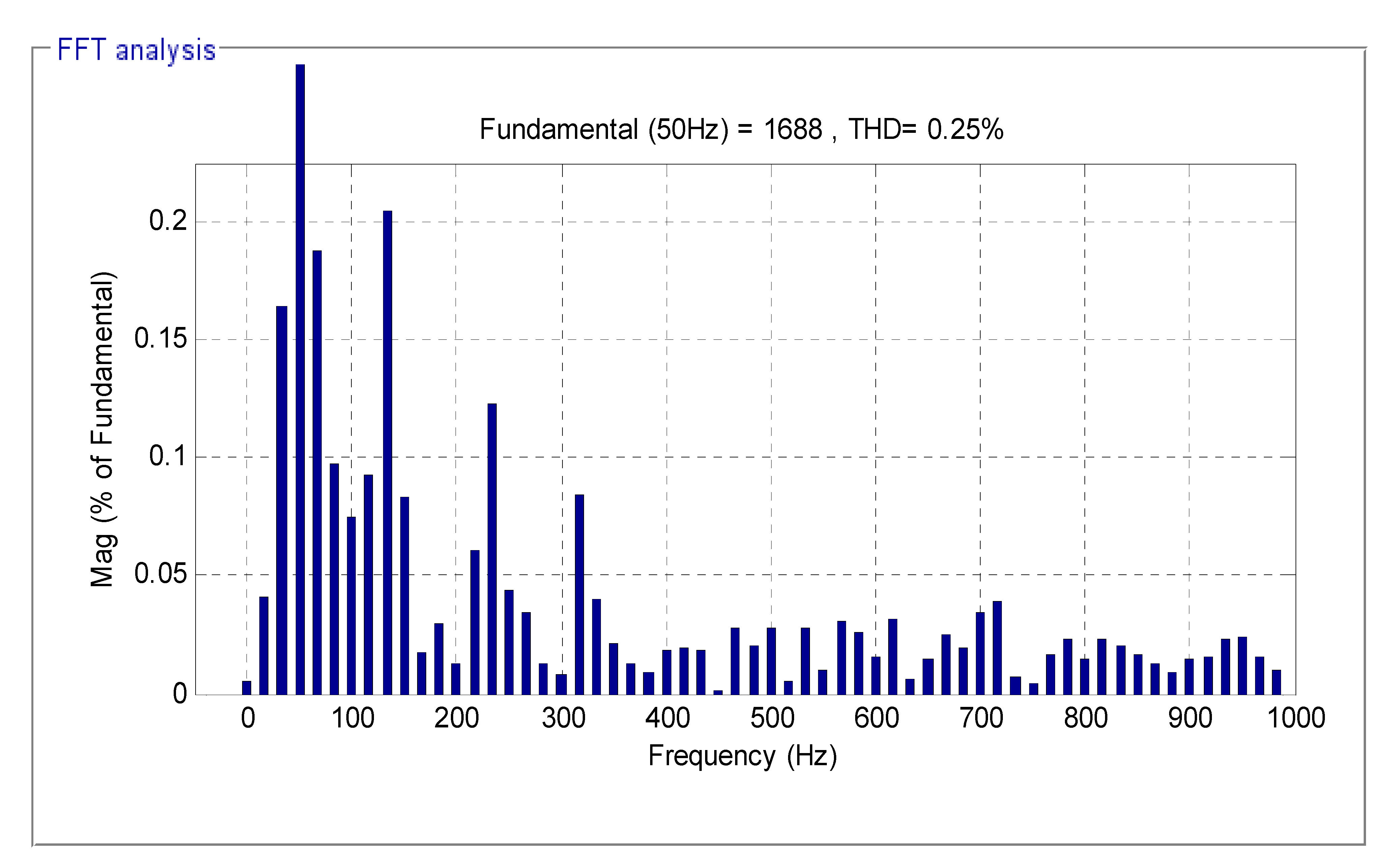
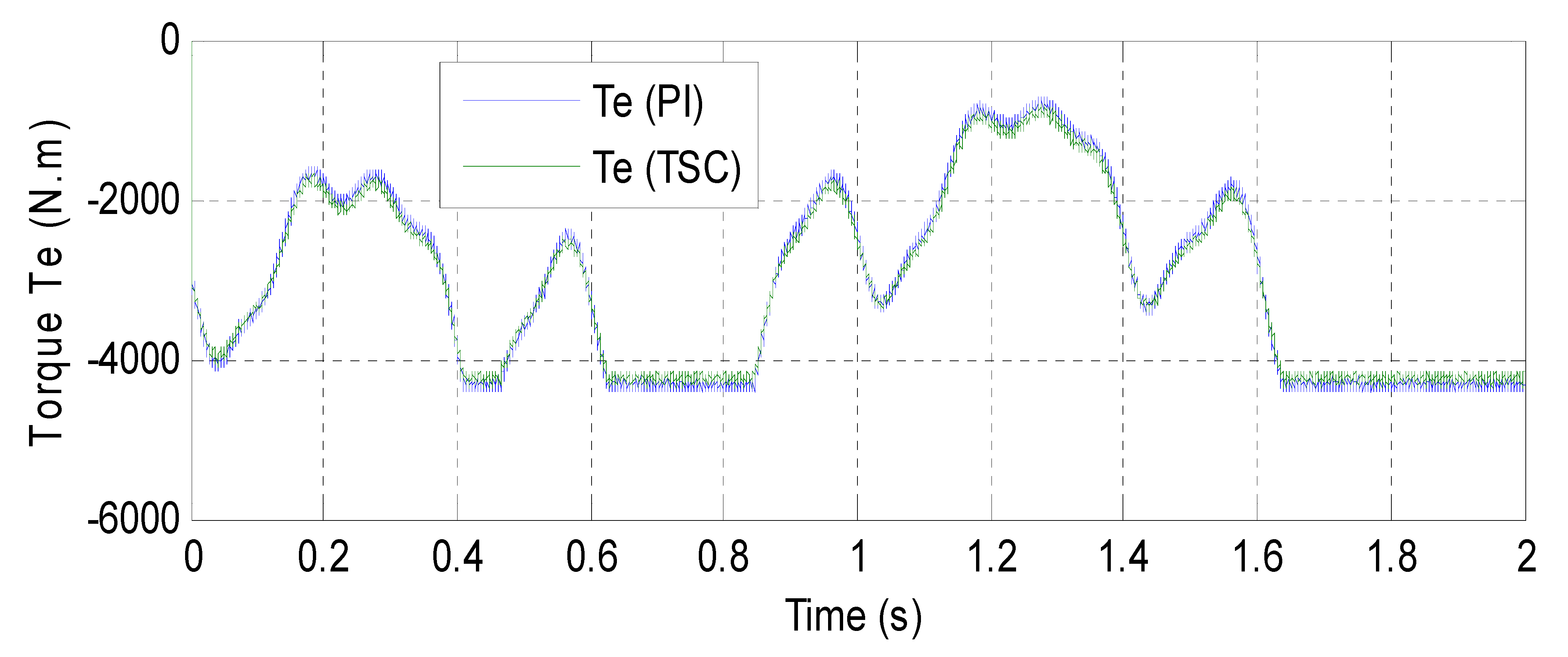
7. Numerical Simulation Results
B. Robustness Test
- Resistances Rs and Rr are multiplied by 2;
- Inductances Ls, Lr and M are divided by 2;
- The mechanical speed is assumed to be fixed and equal to its nominal value.
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pn | 1.5 MW |
| Ω | 150 rad/s |
| P | 2 |
| Vn | 380 V |
| Rr | 0.021 Ω |
| Lr | 0.0136 H |
| Lm | 0.0135 H |
| Rs | 0.012 Ω |
| Ls | 0.0137 H |
| Fr | 0.0024 Nm.s/rad |
| PDRWT | 1.5 MW |
| dM | 51 m |
| dA | 26.4 m |
References
- Liaquat, S.; Zia, M.F.; Benbouzid, M. Modeling and Formulation of Optimization Problems for Optimal Scheduling of Multi-Generation and Hybrid Energy Systems: Review and Recommendations. Electronics 2021, 10, 1688. [Google Scholar] [CrossRef]
- Peng, X.; Chen, R.; Zhou, J.; Qin, S.; Bi, R.; Sun, H. Research on Mechanism and Damping Control Strategy of DFIG-Based Wind Farm Grid-Connected System SSR Based on the Complex Torque Method. Electronics 2021, 10, 1640. [Google Scholar] [CrossRef]
- Xing, L.J.; Feng, L. Wind farm layout optimization using self-informed genetic algorithm with information guided exploitation. Appl. Energy 2019, 248, 429–445. [Google Scholar] [CrossRef]
- Xing, L.J.; Feng, L.; Li, W.; Wei-Jen, L. Wind farm layout optimization based on support vector regression guided genetic algorithm with consideration of participation among landowners. Energy Convers. Manag. 2019, 196, 1267–1281. [Google Scholar] [CrossRef]
- Hu, B.; Nian, H.; Yang, J.; Li, M.; Xu, Y. High-frequency resonance analysis and reshaping control strategy of DFIG system based on DPC. IEEE Trans. Power Electron. 2021, 36, 7810–7819. [Google Scholar] [CrossRef]
- Kulikowski, K.; Sikorski, A. New DPC look-up table methods for three-level AC/DC converter. IEEE Trans. Ind. Electron. 2016, 63, 7930–7938. [Google Scholar] [CrossRef]
- Xiong, P.; Sun, D. Backstepping-based DPC strategy of a wind turbine-driven DFIG under normal and harmonic grid voltage. IEEE Trans. Power Electron. 2016, 31, 4216–4225. [Google Scholar] [CrossRef]
- Gui, Y.; Xu, Q.; Blaabjerg, F.; Gong, H. Sliding mode control with grid voltage modulated DPC for voltage source inverters under distorted grid voltage. CPSS Trans. Power Electron. Appl. 2019, 4, 244–254. [Google Scholar] [CrossRef]
- Hamed, H.A.; Abdou, A.F.; Moursi, M.S.E.; EL-Kholy, E.E. A modified DPC switching technique based on optimal transition route for of 3L-NPC converters. IEEE Trans. Power Electron. 2018, 33, 1902–1906. [Google Scholar] [CrossRef]
- Hu, J. Improved dead-beat predictive DPC strategy of grid-connected DC–AC converters with switching loss minimization and delay compensations. IEEE Trans. Ind. Inform. 2013, 9, 728–738. [Google Scholar] [CrossRef]
- Malinowski, M.; Jasinski, M.; Kazmierkowski, M.P. Simple direct power control of three-phase PWM rectifier using space-vector modulation (DPC-SVM). IEEE Trans. Ind. Electron. 2004, 51, 447–454. [Google Scholar] [CrossRef]
- Benbouhenni, H.; Boudjema, Z.; Belaidi, A. Power control of DFIG in WECS using DPC and NDPC-NPWM methods. Math. Model. Eng. Probl. 2020, 7, 223–236. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, A.; Zhang, H.; Ren, Z.; Wang, J.; Zhang, L.; Zhang, C. Improved direct power control for rectifier based on fuzzy sliding mode. IEEE Trans. Control. Syst. Technol. 2014, 22, 1174–1180. [Google Scholar] [CrossRef]
- Ge, J.; Zhao, Z.; Yuan, L.; Lu, T.; He, F. Direct power control based on natural switching surface for three-phase PWM rectifiers. IEEE Trans. Power Electron. 2015, 30, 2918–2922. [Google Scholar] [CrossRef]
- Xiahou, K.; Li, M.S.; Liu, Y.; Wu, Q.H. Sensor fault tolerance enhancement of DFIG-WTs via perturbation observer-based DPC and two-stage kalman filters. IEEE Trans. Energy Convers. 2018, 33, 483–495. [Google Scholar] [CrossRef]
- Rivera, S.; Kouro, S.; Wu, B.; Alepuz, S.; Malinowski, M.; Cortes, P.; Rodriguez, J. Multilevel direct power control-A generalized approach for grid-tied multilevel converter applications. IEEE Trans. Power Electron. 2014, 29, 5592–5604. [Google Scholar] [CrossRef]
- Abad, G.; RodrÍguez, M.Á.; Poza, J. Two-level VSC-based predictive direct power control of the doubly fed induction machine with reduced power ripple at low constant switching frequency. IEEE Trans. Energy Convers. 2008, 23, 570–580. [Google Scholar] [CrossRef]
- Djoudi, A.; Bacha, S.; Chekireb, H.; Iman-Eini, H.; Boudinet, C. Adaptive sensorless SM-DPC of DFIG-based WECS under disturbed grid: Study and experimental results. IEEE Trans. Sustain. Energy 2018, 9, 570–581. [Google Scholar] [CrossRef]
- Shah, P.; Mehta, A.J. Direct Power Control of DFIG using Super-Twisting Algorithm based on Second-Order Sliding Mode Control. In Proceedings of the 14th International Workshop on Variable Structure Systems (VSS), Nanjing, China, 1–4 June 2016; pp. 136–141. [Google Scholar] [CrossRef]
- Shah, P.; Mehta, A.J. Direct Power Control of Grid-Connected DFIG using Variable Gain Super-Twisting Sliding Mode Controller for Wind Energy Optimization. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 2448–2454. [Google Scholar] [CrossRef]
- Pura, P.; Iwański, G. Rotor Current Feedback Based Direct Power Control of a Doubly Fed Induction Generator Operating with Unbalanced Grid. Energies 2021, 14, 3289. [Google Scholar] [CrossRef]
- Cheng, P.; Wu, C.; Ning, F.; He, J. Voltage Modulated DPC Strategy of DFIG Using Extended Power Theory under Unbalanced Grid Voltage Conditions. Energies 2020, 13, 6077. [Google Scholar] [CrossRef]
- Lin, H.; Leon, J.I.; Luo, W.; Marquez, A.; Liu, J.; Vazquez, S.; Franquelo, L.G. Integral Sliding-Mode Control-Based Direct Power Control for Three-Level NPC Converters. Energies 2020, 13, 227. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Ma, R. Adaptive-Gain Second-Order Sliding Mode Direct Power Control for Wind-Turbine-Driven DFIG under Balanced and Unbalanced Grid Voltage. Energies 2019, 12, 3886. [Google Scholar] [CrossRef] [Green Version]
- Zoghlami, M.; Kadri, A.; Bacha, F. Analysis and Application of the Sliding Mode Control Approach in the Variable-Wind Speed Conversion System for the Utility of Grid Connection. Energies 2018, 11, 720. [Google Scholar] [CrossRef] [Green Version]
- Kolesnikov, A.A. Synergetic Control Theory. Energoatomizdat, Moscow Taganrog, Russia. 1994. Available online: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.13.7213&rep=rep1&type=pdf (accessed on 9 July 2021).
- Medjbeur, L.; Harmas, M.N.; Benaggoune, S. Robust induction motor control using adaptive fuzzy synergetic control. J. Electr. Eng. 2012, 12, 37–42. [Google Scholar]
- Chi-Hua, L.; Ming-Ying, H. A finite time synergetic control scheme for robot manipulators. Comput. Math. Appl. 2012, 64, 1163–1169. [Google Scholar] [CrossRef] [Green Version]
- Nicola, M.; Nicola, C.I. Sensorless Control of PMSM based on Fractional Order Synergetic Control. In Proceedings of the 2020 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 22–23 October 2020; pp. 308–313. [Google Scholar] [CrossRef]
- Benbouhenni, H. Synergetic control theory scheme for asynchronous generator based dual-rotor wind power. J. Electr. Eng. Electron. Control. Comput. Sci. 2021, 7, 19–28. [Google Scholar]
- Santi, E.; Monti, A.; Li, D.; Proddutur, K.; Dougal, R.A. Synergetic control for power electronics applications: A comparison with the sliding mode approach. J. Circuits Syst. Comput. 2004, 13, 737–760. [Google Scholar] [CrossRef] [Green Version]
- Bizon, N. Optimal operation of fuel cell/wind turbine hybrid power system under turbulent wind and variable load. Appl. Energy 2018, 212, 196–209. [Google Scholar] [CrossRef]
- Benbouhenni, H. Application of STA methods and modified SVM strategy in direct vector control system of ASG integrated to dual-rotor wind power: Simulation studies. Int. J. Smart Grid 2021, 5, 62–72. [Google Scholar]
- Yahdou, A.; Djilali, A.B.; Boudjema, Z.; Mehedi, F. Improved vector control of a counter-rotating wind turbine system using adaptive backstepping sliding mode. J. Eur. Syst. Autom. 2020, 53, 645–651. [Google Scholar] [CrossRef]
- Habib, B.; Lemdani, S. Combining synergetic control and super twisting algorithm to reduce the active power undulations of doubly fed induction generator for dual-rotor wind turbine system. Electr. Eng. Electromechanics 2021, 3, 8–17. [Google Scholar] [CrossRef]
- Beik, O.; Al-Adsani, A.S. Active and passive control of a dual rotor wind turbine generator for DC Grids. IEEE Access 2021, 9, 1987–1995. [Google Scholar] [CrossRef]
- Bizon, N. Optimization of the Fuel Cell Renewable Hybrid Power Systems, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Irawan, Y.H.; Bramantya, M.A. Numerical Simulation of the Effect of Axial Distance between Two Rotors in Counter-Rotating Wind Turbines. In Proceedings of the 2nd International Conference on Science and Technology-Computer (ICST), Yogyakarta, Indonesia, 27–28 October 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Kale, S.A.; Sapali, S.N. Power Output Prediction and Primary Evaluation of a Unidirectional Co-Axial Series Rotors Wind Turbine. In Proceedings of the 2013 Annual International Conference on Emerging Research Areas and 2013 International Conference on Microelectronics, Communications and Renewable Energy, Kanjirapally, India, 4–6 June 2013; pp. 1–3. [Google Scholar] [CrossRef]
- Mohamed, A.; El-Baz, A.; Abd-ELaziz, N.; Mostafa, A. Computational Investigation of Ducted Dual Rotor Wind Turbine. In Proceedings of the 2019 Novel Intelligent and Leading Emerging Sciences Conference (NILES), Giza, Egypt, 28 October–4 November 2019; pp. 29–33. [Google Scholar] [CrossRef]
- Yahdou, A.; Hemici, B.; Boudjema, Z. Sliding mode control of dual rotor wind turbine system. Mediterr. J. Meas. Control. 2015, 11, 412–419. [Google Scholar]
- Benbouhenni, H.; Boudjema, Z.; Belaidi, A. Indirect vector control of a DFIG supplied by a two-level FSVM inverter for wind turbine system. Majlesi J. Electr. Eng. 2019, 13, 45–54. [Google Scholar]
- Boudjema, Z.; Taleb, R.; Djerriri, Y.; Yahdou, A. A novel direct torque control using second order continuous sliding mode of a doubly fed induction generator for a wind energy conversion system. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 965–975. [Google Scholar] [CrossRef] [Green Version]
- Kolesnikov, A.A. Introduction of Synergetic Control. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 3013–3016. [Google Scholar] [CrossRef]
- Sriprang, S.; Nahid-Mobarakeh, B.; Takorabet, N.; Pierfederici, S.; Kumam, P.; Bizon, N.; Taghavi, N.; Vahedi, A.; Mungporn, P.; Thounthong, P. Design and control of permanent-magnet assisted synchronous reluctance motor with copper loss minimization sing MTPA. J. Electr. Eng. 2020, 71, 11–19. [Google Scholar] [CrossRef]
- Thounthong, P.; Sikkabut, S.; Poonnoy, N.; Mungporn, P.; Yodwong, B.; Kumam, P.; Bizon, N.; Nahid-Mobarakeh, B.; Pierfederici, S. Nonlinear differential flatness-based speed/torque control with state-observers of permanent magnet synchronous motor drives. IEEE T Ind. Appl. 2018, 54, 2874–2884. [Google Scholar] [CrossRef]
- Van der Broeck, H.W.; Skudelny, H.; Stanke, G.V. Analysis and realization of a pulse width modulator based on voltage space vectors. IEEE Trans. Ind. Appl. 1988, 24, 142–150. [Google Scholar] [CrossRef]
- Mehedi, F.; Yahdou, A.; Djilali, A.B.; Benbouhenni, H. Direct torque fuzzy controlled drive for multi-phase IPMSM based on SVM technique. J. Eur. Syst. Autom. 2020, 53, 259–266. [Google Scholar] [CrossRef]
- Mehedi, F.; Benbouhenni, B.; Nezli, L.; Boudana, D. Feedforward neural network-DTC of multi-phase permanent magnet synchronous motor using five-phase neural space vector pulse width modulation strategy. J. Eur. Syst. Autom. 2021, 54, 345–354. [Google Scholar] [CrossRef]
- Noguchi, T.; Tomiki, H.; Kondo, S.; Takahashi, I. Direct power control of PWM converter without power-source voltage sensors. IEEE Trans. Ind. Appl. 1998, 34, 473–479. [Google Scholar] [CrossRef]
- Boudjema, Z.; Benbouhenni, H.; Bouhani, A.; Chabni, F. DSPACE implementation of a neural SVPWM technique for a two level voltage source inverter. Iran. J. Electr. Electron. Eng. 2021, 17, 1–9. [Google Scholar]
- Yusoff, N.A.; Razali, A.M.; Karim, K.A.; Sutikno, T.; Jidin, A. A concept of virtual-flux direct power control of three-phase AC-DC converter. Int. J. Power Electron. Drive Syst. 2017, 8, 1776–1784. [Google Scholar] [CrossRef]
- Amrane, F.; Chaiba, A.; Badr Eddine, B.; Saad, M. Design and implementation of high performance field oriented control for grid-connected doubly fed induction generator via hysteresis rotor current controller. Rev. Roum. Sci. Tech. Electrotechn. Energ. 2016, 61, 319–324. [Google Scholar]

























| Parameters | Values |
|---|---|
| Training | Levenberg-Marquardt backpropagation |
| Coeffofaccelerationofconvergence(mc) | 0.9 |
| Numberofneurons in hiddenlayer | 12 |
| TrainParam.mu | 0.9 |
| TrainParam.show | 50 |
| Numberofneurons in layer 1 | 1 |
| TrainParam.goal | 0 |
| TrainParam.eposh | 1000 |
| TrainParam.Lr | 0.002 |
| Numberofneurons in layer 2 | 1 |
| Functionsofactivation | Tensing, Purling, gensim |
| Performances | Mean Squard Error (mse) |
| Performance Criteria | DARPC-PI | TSC-DARPC |
|---|---|---|
| THD (%) | 0.84 | 0.50 |
| Minimization of torque ripple | Weak | Very good |
| Minimization of active power ripple | Weak | Very good |
| Minimization of reactive power ripple | Weak | Very good |
| Simplicity of implementation | Simple | More simple |
| Robustness | − | + |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benbouhenni, H.; Bizon, N. Terminal Synergetic Control for Direct Active and Reactive Powers in Asynchronous Generator-Based Dual-Rotor Wind Power Systems. Electronics 2021, 10, 1880. https://doi.org/10.3390/electronics10161880
Benbouhenni H, Bizon N. Terminal Synergetic Control for Direct Active and Reactive Powers in Asynchronous Generator-Based Dual-Rotor Wind Power Systems. Electronics. 2021; 10(16):1880. https://doi.org/10.3390/electronics10161880
Chicago/Turabian StyleBenbouhenni, Habib, and Nicu Bizon. 2021. "Terminal Synergetic Control for Direct Active and Reactive Powers in Asynchronous Generator-Based Dual-Rotor Wind Power Systems" Electronics 10, no. 16: 1880. https://doi.org/10.3390/electronics10161880
APA StyleBenbouhenni, H., & Bizon, N. (2021). Terminal Synergetic Control for Direct Active and Reactive Powers in Asynchronous Generator-Based Dual-Rotor Wind Power Systems. Electronics, 10(16), 1880. https://doi.org/10.3390/electronics10161880