
A Metaheuristic Based Approach for the Customer-Centric Perishable Food Distribution Problem



Abstract
:1. Introduction
2. Related Works
- Most of the problems studied in the literature are bi-objective focusing on cost minimization, and freshness maximization or service level improvement.
- There are a few studies that propose multi-objective models that take into account simultaneously the economic, social, and environmental aspects.
- Those reviewed works considering the service level improvement objective, evaluate the quality of service with respect to the satisfaction of the time window constraint. However, the service level can be related to other criteria.
3. Model Formulation
3.1. The Optimization Goal Setting
- Objective 1: Minimize the total cost
- The fixed costsThe fixed costs of a vehicle are not related to the mileage, and represent the maintenance, and depreciation costs. Assuming that the depot has k refrigerated trucks to provide distribution services for the set of customers.F represents the fixed cost related to a vehicle. The fixed costs can be formulated as:
- The transportation costsWe denote these costs by . They are proportional to the vehicle mileage. We consider only the fuel consumption cost and express it as:
- The refrigeration costsInclude two types of costs: the costs incurred by the vehicle’s energy usage to maintain a specific temperature in the process of transportation, in addition to the costs of extra energy during the unloading.The refrigeration costs during transportation process denoted are expressed as follows:The cost of energy supplied during the unloading is expressed as:the total refrigeration cost
- The damage costsThe quality of perishable foods decay with the time extension, and the temperature changes during the transportation and handling process. If product quality falls to a certain level, damage costs are incurred. The quality of refrigerated goods can be expressed using the following function [28]:where , and are, respectively, the quality of product at time t and from the depot 0. The parameter ∂ is the spoilage rate of the product, and it’s assumed as an increasing function to the temperature. Thus, we differentiate between the damage cost during the delivery , and the damage cost during the unloading due to the temperature changes (∂ varies also). The damage cost is expressed as follows:where the coefficient represents the spoilage rate of product when the vehicle is closed, the arrival time of vehicle k at customer i, the departure time of vehicle k from the depot, and is 0-1 decision variable taking the value 1 in case the vehicle k is servicing the customer i, and 0 otherwise.The damage cost during the unloading is defined as:With the remaining quantity of product after servicing the customer i, the necessary time to serve is customer i is , and is the spoilage rate when the vehicle is opened.The total damage cost is therefore:Given the cost components defined above, the total cost can be formulated as:
- Objective 2: Maximize the average freshness
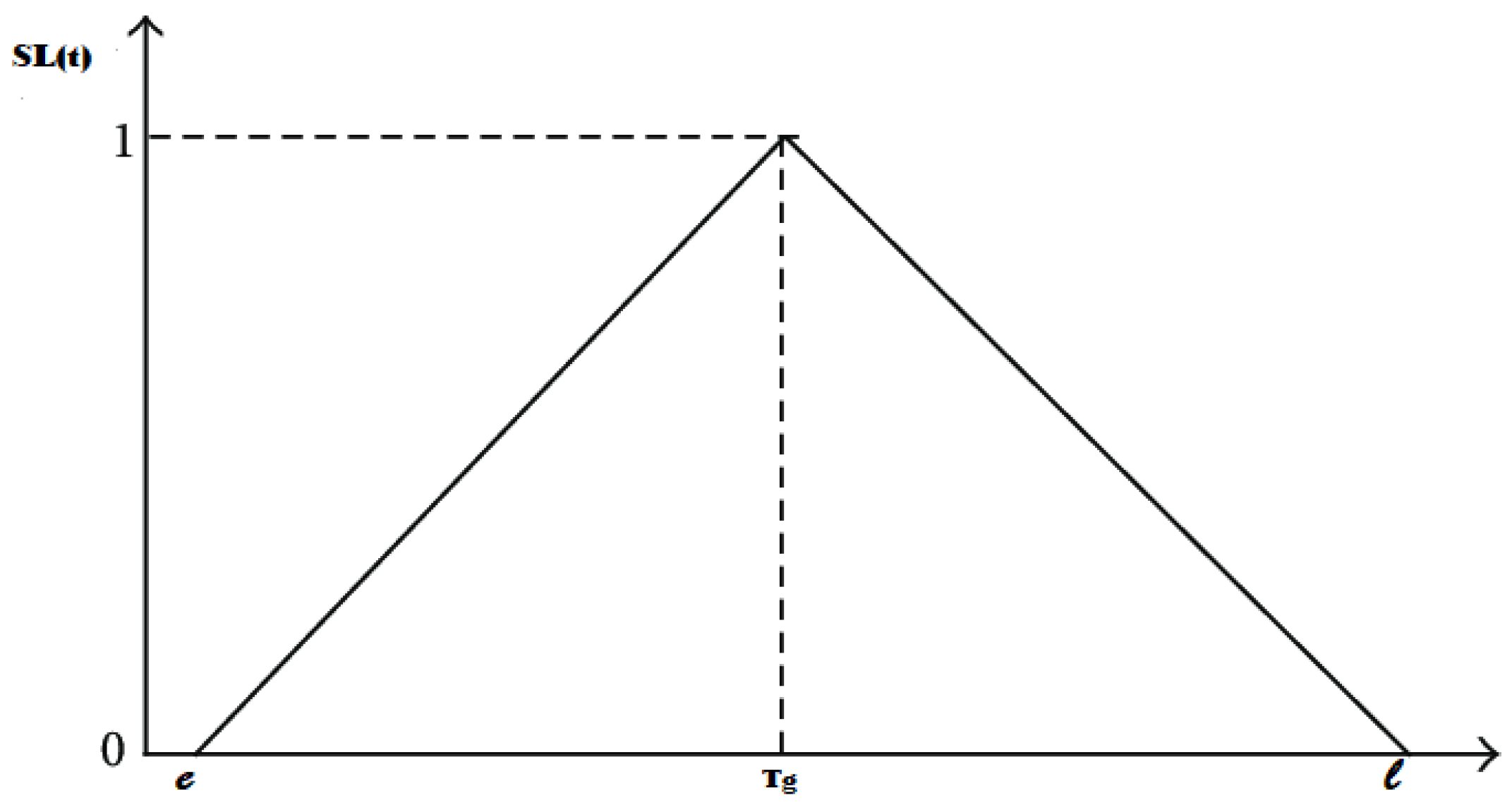
- Objective 3: Maximize the service level
- Objective 4: Minimize the total tardiness
3.2. Mathematical Model
4. The Solving Strategy
5. General Variable Neighborhood Search Heuristic
5.1. Variable Neighborhood Search (VNS)
5.2. GVNS Implementation Details
| Algorithm 1: GVNS |
 |
6. GVNS Performance Evaluation
6.1. Data Description
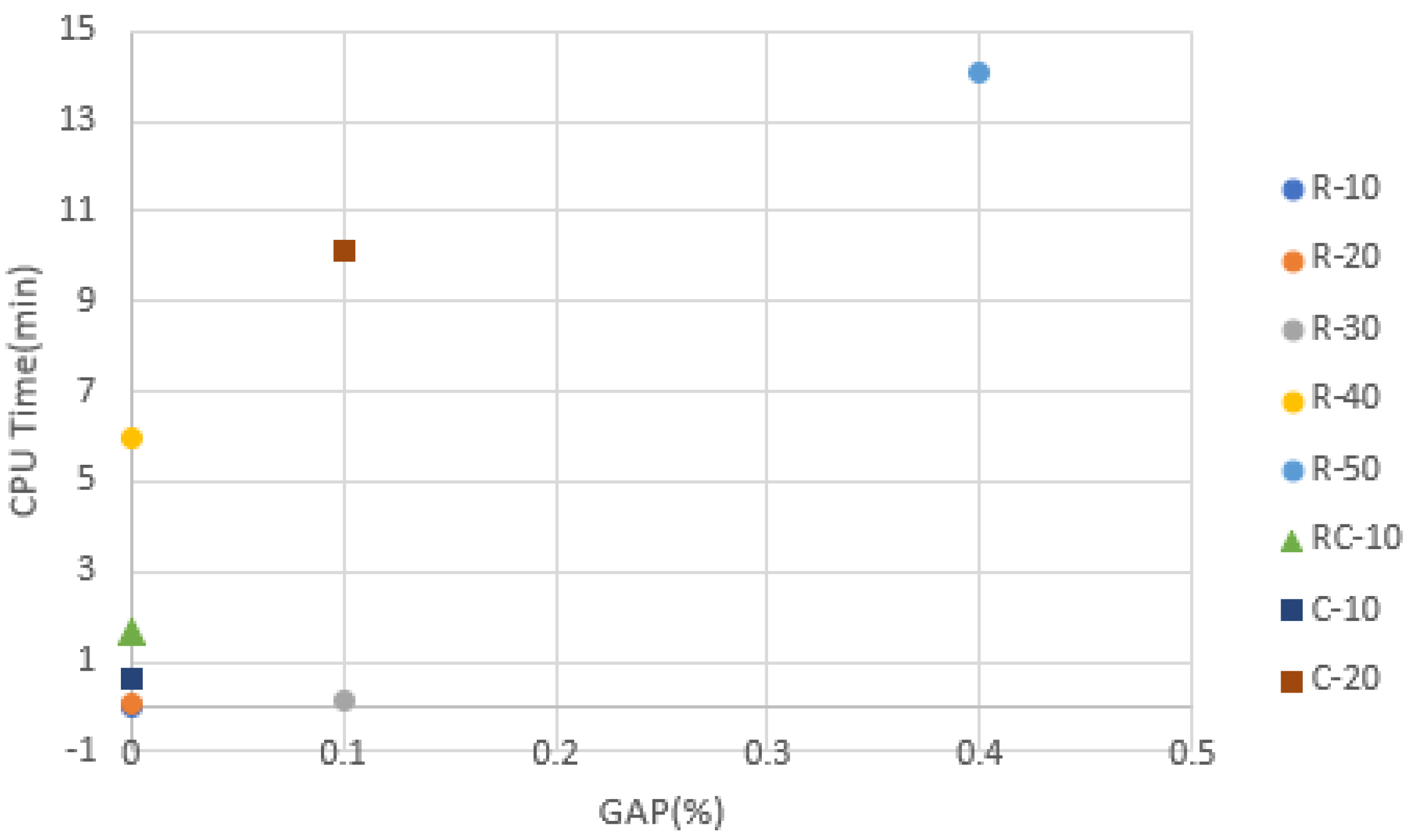
6.2. Computational Experiments
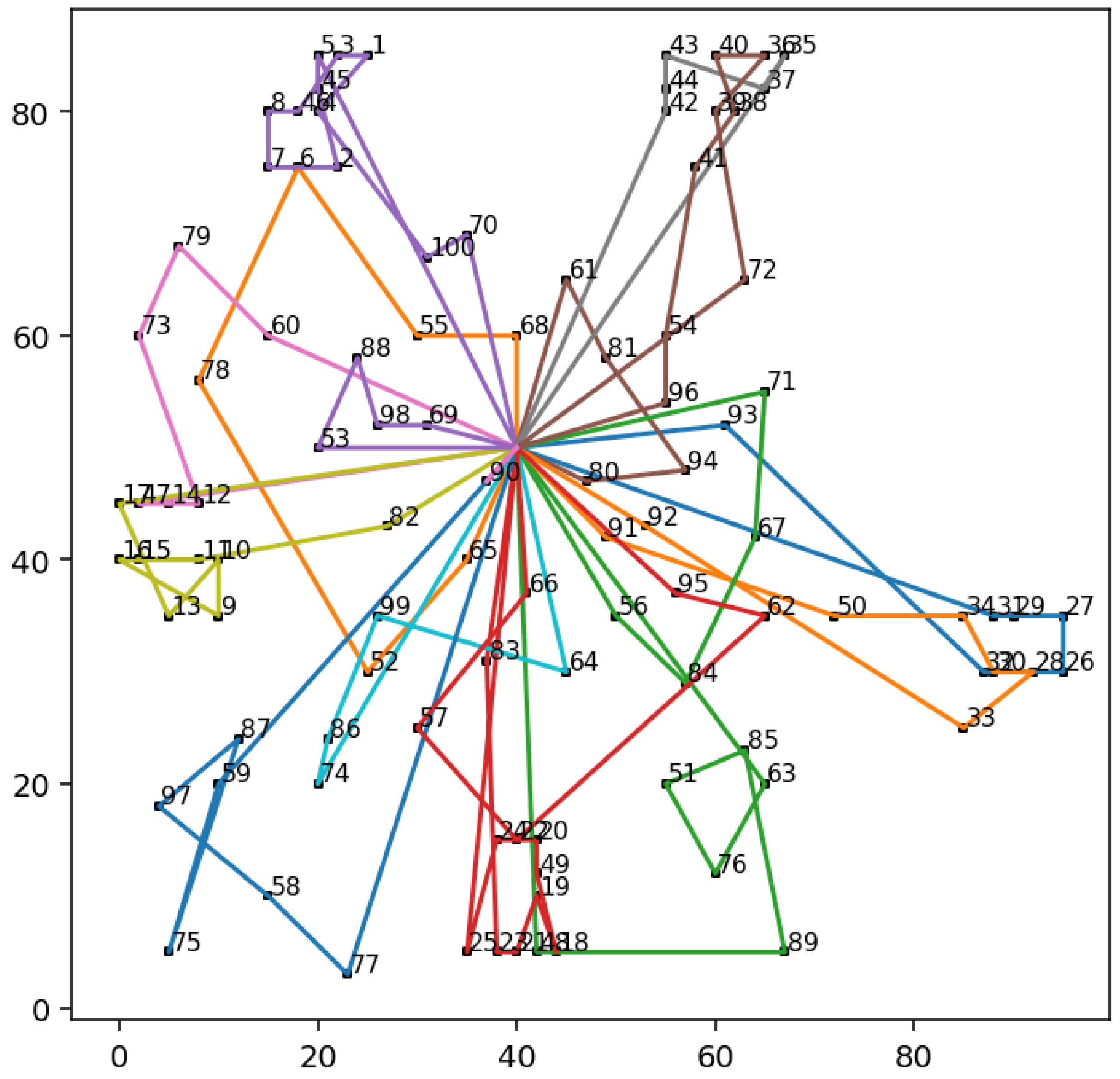
7. Application Example
7.1. Data and Parameter Setting
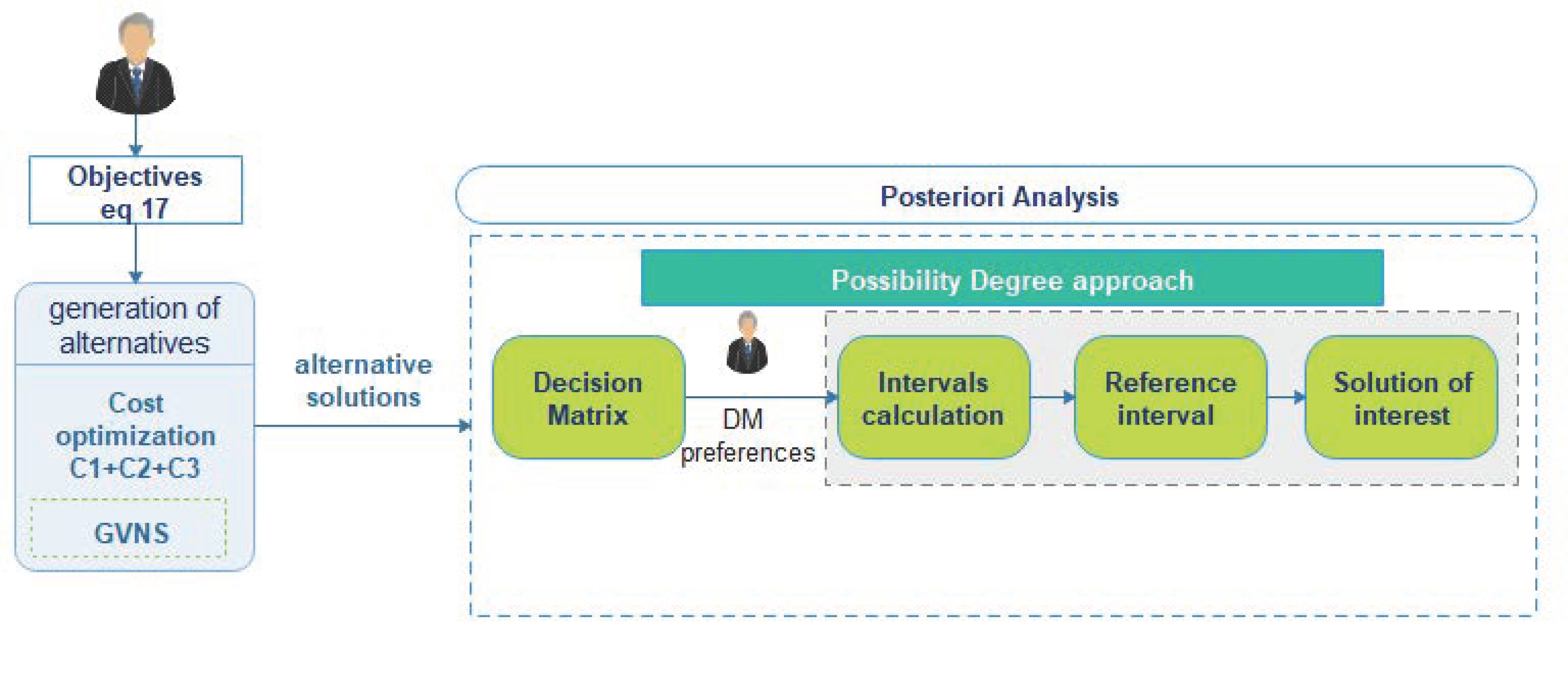
7.2. Generation of Alternative Solutions
7.3. Decision Maker Preferences and Ranking of Solutions
- Economic-centric (E-c): Cost Average freshness Service level Tardiness.
- Product-centric (P-c): Average freshness Cost Service level Tardiness.
- Customer Satisfaction-centric (C-c): Service level Cost Average freshness Tardiness.
8. Conclusions and Perspectives
Author Contributions
Funding
Conflicts of Interest
Appendix A. The General Variable Neighborhood Search GVNS
Appendix A.1. Initial Solution Generation

Appendix A.2. The Neighbourhood Structures

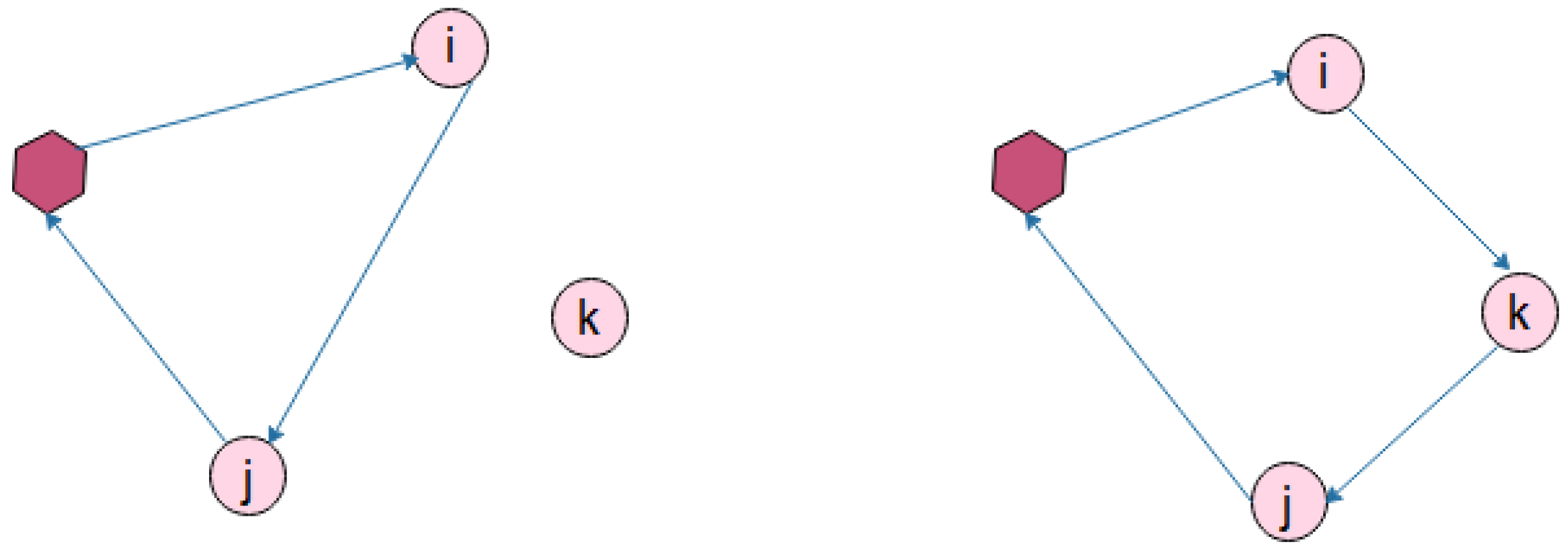
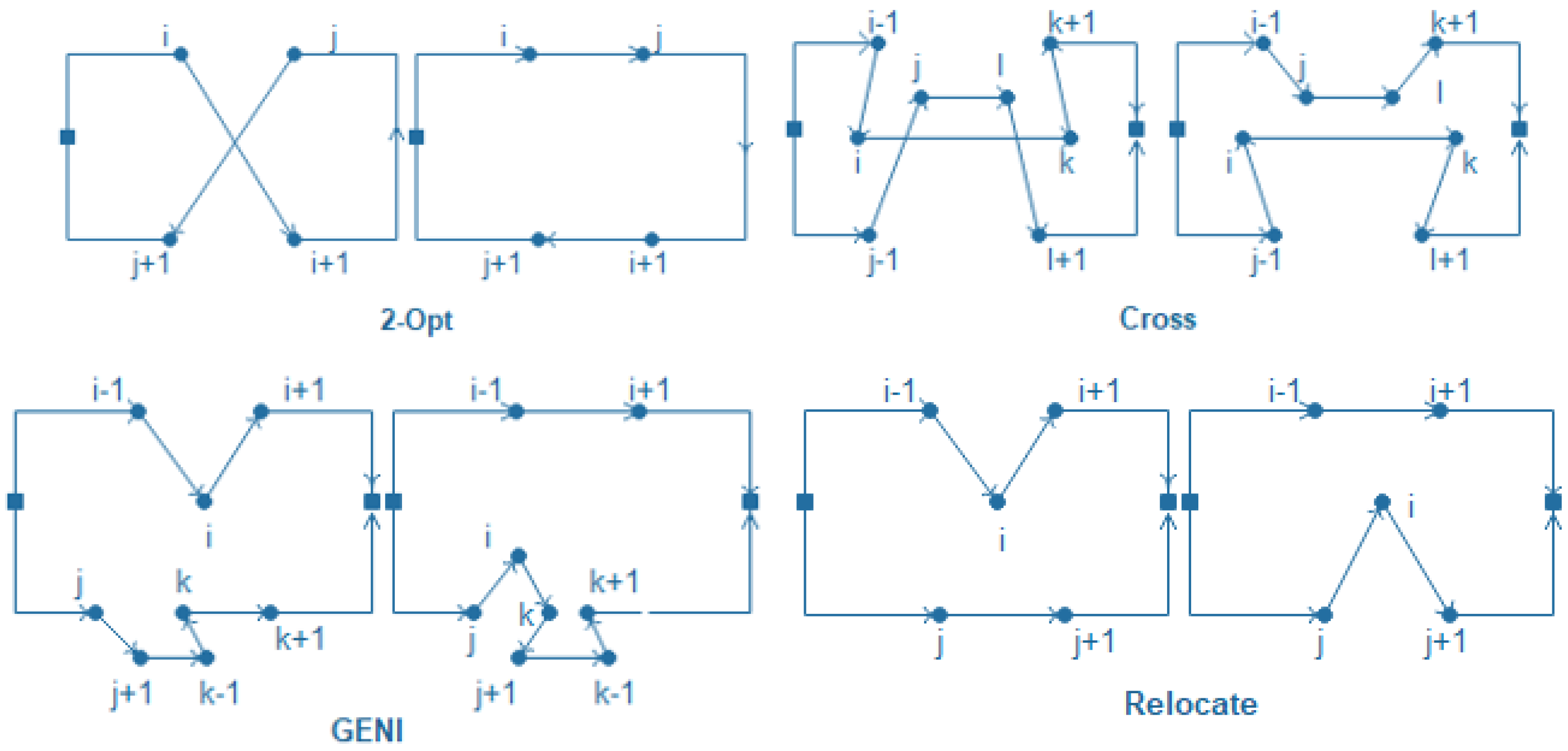
- Relocate: In this operator the customer visit is moved from a route to another.
- GENI: Is a variant of the relocate operator which consists of placing a customer two customer nodes on the closest destination path, even though they are not consecutive.
- CROSS: The key concept behind cross exchange is to remove two edges and from the first route, and remove and from the second route. Then, by adding the edges ,, , and the segments and are swapped.
- 2-OPT: Replace two of the tour’s edges with two additional edges, and iterates until no further change is necessary.
Appendix B. A Possibility Degree Based Approach to Rank Solutions
| c1 | c2 | … | cn | |
| A1 | x11 | x12 | … | x1n |
| A2 | x21 | x22 | … | x2n |
| Am | xm1 | xm2 | … | xmn |
Appendix B.1. Decision Matrix Normalization
Appendix B.2. Intervals Calculations
Appendix B.3. Reference Interval and Interval’s Comparison
- 1.
- if
- 2.
- if
Appendix B.4. Ranking of Alternatives
References
- Yakavenka, V.; Mallidis, I.; Vlachos, D.; Iakovou, E.; Eleni, Z. Development of a multi-objective model for the design of sustainable supply chains: The case of perishable food products. Ann. Oper. Res. 2020, 294, 593–621. [Google Scholar] [CrossRef]
- Tuljak Suban, D.; Suban, V. Influence of transportation mode to the deterioration rate: Case study of food transport by ship. Int. J. Biol. Biomol. Agric. Biotechnol. Eng. 2015, 9, 37–42. [Google Scholar]
- Boge, F. Food Waste & Food Imperfection. 2019. Available online: http://tesi.luiss.it/24940/ (accessed on 20 August 2021).
- Utama, D.M.; Dewi, S.K.; Wahid, A.; Santoso, I. The vehicle routing problem for perishable goods: A systematic review. Cogent Eng. 2020, 7, 1816148. [Google Scholar] [CrossRef]
- Raseman, W.J.; Jacobson, J.; Kasprzyk, J.R. Parasol: An open source, interactive parallel coordinates library for multi-objective decision making. Environ. Model. Softw. 2019, 116, 153–163. [Google Scholar] [CrossRef]
- Mullaseril, P.A.; Dror, M.; Leung, J. Split-delivery routeing heuristics in livestock feed distribution. J. Oper. Res. Soc. 1997, 48, 107–116. [Google Scholar] [CrossRef]
- Tarantilis, C.; Kiranoudis, C. A meta-heuristic algorithm for the efficient distribution of perishable foods. J. Food Eng. 2001, 50, 1–9. [Google Scholar] [CrossRef]
- Tarantilis, C.; Kiranoudis, C. Distribution of fresh meat. J. Food Eng. 2002, 51, 85–91. [Google Scholar] [CrossRef]
- Faulin, J. Applying MIXALG procedure in a routing problem to optimize food product delivery. Omega 2003, 31, 387–395. [Google Scholar] [CrossRef]
- Prindezis, N.; Kiranoudis, C.; Marinos-Kouris, D. A business-to-business fleet management service provider for central food market enterprises. J. Food Eng. 2003, 60, 203–210. [Google Scholar] [CrossRef]
- Campbell, A.M.; Savelsbergh, M.W. Decision support for consumer direct grocery initiatives. Transp. Sci. 2005, 39, 313–327. [Google Scholar] [CrossRef] [Green Version]
- Ambrosino, D.; Sciomachen, A. A food distribution network problem: A case study. IMA J. Manag. Math. 2007, 18, 33–53. [Google Scholar] [CrossRef]
- Hsu, C.I.; Hung, S.F.; Li, H.C. Vehicle routing problem with time-windows for perishable food delivery. J. Food Eng. 2007, 80, 465–475. [Google Scholar] [CrossRef]
- Osvald, A.; Stirn, L.Z. A vehicle routing algorithm for the distribution of fresh vegetables and similar perishable food. J. Food Eng. 2008, 85, 285–295. [Google Scholar] [CrossRef]
- Doerner, K.F.; Gronalt, M.; Hartl, R.F.; Kiechle, G.; Reimann, M. Exact and heuristic algorithms for the vehicle routing problem with multiple interdependent time windows. Comput. Oper. Res. 2008, 35, 3034–3048. [Google Scholar] [CrossRef]
- Chen, H.K.; Hsueh, C.F.; Chang, M.S. Production scheduling and vehicle routing with time windows for perishable food products. Comput. Oper. Res. 2009, 36, 2311–2319. [Google Scholar] [CrossRef]
- Hasani, A.; Zegordi, S.H.; Nikbakhsh, E. Robust closed-loop supply chain network design for perishable goods in agile manufacturing under uncertainty. Int. J. Prod. Res. 2012, 50, 4649–4669. [Google Scholar] [CrossRef]
- El Raoui, H.; Oudani, M.; Alaoui, A.E.H. ABM-GIS simulation for urban freight distribution of perishable food. In Proceedings of the International Workshop on Transportation and Supply Chain Engineering (IWTSCE 18), Rabat, Morocco, 8–9 May 2018. [Google Scholar]
- El Raoui, H.; Oudani, M.; Pelta, D.; Alaoui, A.E.H.; El Aroudi, A. Vehicle routing problem on a road-network with fuzzy time windows for perishable food. In Proceedings of the IEEE International Smart Cities Conference (ISC2), Casablanca, Morocco, 14–17 October 2019; IEEE: New York, NY, USA, 2019; pp. 492–497. [Google Scholar]
- El Raoui, H.; Oudani, M.; Alaoui, A.E.H. Perishable food distribution in urban area based on real-road network graph. In Proceedings of the 5th International Conference on Logistics Operations Management (GOL), Rabat, Morocco, 28–30 October 2020; IEEE: New York, NY, USA, 2020; pp. 1–6. [Google Scholar]
- Gong, W.; Fu, Z. ABC-ACO for perishable food vehicle routing problem with time windows. In Proceedings of the 2010 International Conference on Computational and Information Sciences, Chengdu, China, 17–19 December 2010; IEEE: New York, NY, USA, 2010; pp. 1261–1264. [Google Scholar]
- Amorim, P.; Almada-Lobo, B. The impact of food perishability issues in the vehicle routing problem. Comput. Ind. Eng. 2014, 67, 223–233. [Google Scholar] [CrossRef]
- Govindan, K.; Jafarian, A.; Khodaverdi, R.; Devika, K. Two-echelon multiple-vehicle location–routing problem with time windows for optimization of sustainable supply chain network of perishable food. Int. J. Prod. Econ. 2014, 152, 9–28. [Google Scholar] [CrossRef]
- Khalili-Damghani, K.; Abtahi, A.R.; Ghasemi, A. A new bi-objective location-routing problem for distribution of perishable products: Evolutionary computation approach. J. Math. Model. Algorithms Oper. 2015, 14, 287–312. [Google Scholar] [CrossRef]
- Kuo, R.; Nugroho, D.Y. A fuzzy multi-objective vehicle routing problem for perishable products using gradient evolution algorithm. In Proceedings of the 2017 4th international conference on industrial engineering and applications (ICIEA), Nagoya, Japan, 21–23 April 2017; IEEE: New York, NY, USA, 2017; pp. 219–223. [Google Scholar]
- Sahraeian, R.; Esmaeili, M. A multi-objective two-echelon capacitated vehicle routing problem for perishable products. J. Ind. Syst. Eng. 2018, 11, 62–84. [Google Scholar]
- Zulvia, F.E.; Kuo, R.; Nugroho, D.Y. A many-objective gradient evolution algorithm for solving a green vehicle routing problem with time windows and time dependency for perishable products. J. Clean. Prod. 2020, 242, 118428. [Google Scholar] [CrossRef]
- Wang, S.; Tao, F.; Shi, Y.; Wen, H. Optimization of vehicle routing problem with time windows for cold chain logistics based on carbon tax. Sustainability 2017, 9, 694. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Wang, M.; Ruan, J.; Li, Y. Multi-objective optimization for delivering perishable products with mixed time windows. Adv. Prod. Eng. Manag. 2018, 13, 321–332. [Google Scholar] [CrossRef] [Green Version]
- Torres, M.; Pelta, D.A.; Lamata, M.T.; Yager, R.R. An approach to identify solutions of interest from multi and many-objective optimization problems. Neural Comput. Appl. 2021, 33, 2471–2481. [Google Scholar] [CrossRef]
- Mladenović, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]
- Polacek, M.; Hartl, R.F.; Doerner, K.; Reimann, M. A variable neighborhood search for the multi depot vehicle routing problem with time windows. J. Heuristics 2004, 10, 613–627. [Google Scholar] [CrossRef] [Green Version]
- Kytöjoki, J.; Nuortio, T.; Bräysy, O.; Gendreau, M. An efficient variable neighborhood search heuristic for very large scale vehicle routing problems. Comput. Oper. Res. 2007, 34, 2743–2757. [Google Scholar] [CrossRef]
- Goel, A.; Gruhn, V. A general vehicle routing problem. Eur. J. Oper. Res. 2008, 191, 650–660. [Google Scholar] [CrossRef] [Green Version]
- Hemmelmayr, V.C.; Doerner, K.F.; Hartl, R.F. A variable neighborhood search heuristic for periodic routing problems. Eur. J. Oper. Res. 2009, 195, 791–802. [Google Scholar] [CrossRef] [Green Version]
- Fontaine, P.; Taube, F.; Minner, S. Human solution strategies for the vehicle routing problem: Experimental findings and a choice-based theory. Comput. Oper. Res. 2020, 120, 104962. [Google Scholar] [CrossRef]
- Van Rooij, I.; Stege, U.; Schactman, A. Convex hull and tour crossings in the Euclidean traveling salesperson problem: Implications for human performance studies. Mem. Cogn. 2003, 31, 215–220. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Solomon, M.M. Algorithms for the vehicle routing and scheduling problems with time window constraints. Oper. Res. 1987, 35, 254–265. [Google Scholar] [CrossRef] [Green Version]
- Bräysy, O.; Gendreau, M. Vehicle routing problem with time windows, Part I: Route construction and local search algorithms. Transp. Sci. 2005, 39, 104–118. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Pan, L.H.; Liu, Z.L.; Peng, Y.N. On possibility-degree formulae for ranking interval numbers. Soft Comput. 2018, 22, 2557–2565. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Sustainability Aspect | Sustainability Measure | Objective Functions | Methods | ||
|---|---|---|---|---|---|---|
| Economic | Environmental | Social | ||||
| [6] | * | * | Distribution cost Time window respect | Min. total cost | Heuristics | |
| [7] | * | Distribution cost | Min. travel cost | Heuristics | ||
| [8] | * | Distribution cost | Min. travel cost | Heuristics | ||
| [9] | * | Distribution cost | Min. total distance | Heuristics+ Exact | ||
| [10] | * | Distribution cost | Min. total cost | Metaheuristics | ||
| [11] | * | Profitability | Max. profit | Heuristics | ||
| [12] | * | Distribution cost | Min. total cost | Heuristics | ||
| [13] | * | * | Distribution cost Time window respect | Min. total cost | Heuristic | |
| [14] | * | * | Distribution cost Products quality | Min. total cost | Heuristics | |
| [15] | * | * | Cost efficiency Time window respect | Min. total distance | Exact+ Heuristics | |
| [16] | * | * | Cost efficiency Products quality Time window respect | Max. profit | Exact+ Heuristics | |
| [17] | * | * | Cost efficiency Products quality | Max. profit | Exact | |
| [18] | * | * | * | Cost efficiency Time window respect Carbon emission | Min. total travel time | Simulation |
| [19] | * | * | Distribution cost Time window respect | Min. total cost | Exact | |
| [20] | * | * | Distribution cost Time window respect | Min. total cost | Exact | |
| [21] | * | * | Distribution cost Products quality | Min. total cost | Heuristic | |
| [22] | * | * | Cost efficiency Products freshness Time window respect | Min. total cost Max. freshness | Mulit-objective evolutionary algorithm | |
| [23] | * | * | * | Cost efficiency Products quality Time window respect Environmental impact | Min. total cost Min. carbon emissions | Metaheuristics+ Pareto optimality |
| [24] | * | Distribution cost | Min. total cost | Evolutionary computation | ||
| [25] | * | * | Distribution cost Time window respect | Min. total cost Min. variance of vehicles | Multi-objective Gradient Evolutionary algorithm | |
| [26] | * | * | * | Cost efficiency Service level Environmental impact | Min. total cost Min. waiting time Min. carbon emissions | NSGA-II |
| [27] | * | * | * | Distribution cost Products freshness Time window respect Environmental impact | Min. operational cost Min. deterioration cost Min. carbon emission Max. service level | Many-objective Gradient Evolutionary algorithm |
| Sets and Indices | |
| V | Set of nodes |
| Set of customers | |
| K | Set of vehicles |
| i,j | Indices of nodes |
| Decision Variables | |
| A 0-1 decision variable, equal to 1 in case the truck k travels from node i to j, 0 otherwise. | |
| A 0-1 decision variable, equal to 1 in case the customer i is served by the truck k, 0 otherwise. | |
| A decision variable representing the starting service time at node i using the truck k. | |
| Parameters | |
| The transportation cost from node i to j. | |
| F | Fixed cost associated to a vehicle. |
| The travel time from i to j. | |
| The distance between node i and j. | |
| The cost per unit time for the refrigeration during the transportation process. | |
| The unloading time at customer i. | |
| The unit refrigeration cost during the unloading. | |
| The necessary time to serve customer i | |
| The demand of customer i | |
| P | The price per unit product |
| The products remaining on the vehicle after serving the customer i | |
| Q | The loading capacity of trucks. |
| K | The fleet of trucks |
| The spoilage rate of products during the transportation process | |
| The spoilage rate of products during the unloading process | |
| The time window of customer i | |
| The target time of customer i | |
| The service level for customer i if we deliver their demand at time t. | |
| M | Large positive constant. |
| Instance | GVNS Solution | CPLEX Solution | Gap (%) | ||
|---|---|---|---|---|---|
| Objective | Time (s) | Objective | Time (s) | ||
| R101-10 | 630.52 | 0.04 | 630.520 | 1.76 | 0 |
| R101-20 | 1224.18 | 3.59 | 1224.18 | 7.15 | 0 |
| R101-30 | 1665.78 | 3.64 | 1664.10 | 11.20 | 0.1 |
| R101-40 | 2223.10 | 6.51 | 2223.10 | 363.00 | 0 |
| R101-50 | 2600.48 | 14.36 | 2589.92 | 858.00 | 0.4 |
| R101-60 | 2969.64 | 26.44 | No Sol | ||
| R101-70 | 3543.04 | 35.74 | No Sol | ||
| R101-80 | 3794.16 | 51.77 | No Sol | ||
| R101-90 | 4159.70 | 84.99 | No Sol | ||
| R101-100 | 4398.88 | 111.70 | No Sol | ||
| RC107-10 | 436.32 | 0.06 | 436.32 | 1.74 | 0 |
| RC107-20 | 771.70 | 1.45 | No Sol | ||
| RC107-30 | 1147.52 | 4.09 | No Sol | ||
| RC107-40 | 1469.18 | 8.21 | No Sol | ||
| RC107-50 | 1860.02 | 20.33 | No Sol | ||
| RC107-60 | 2434.92 | 45.78 | No Sol | ||
| RC107-70 | 2657.12 | 180.10 | No Sol | ||
| RC107-80 | 3023.60 | 249.30 | No Sol | ||
| RC107-90 | 3401.92 | 358.50 | No Sol | ||
| RC107-100 | 3591.20 | 589.60 | No Sol | ||
| C104-10 | 1068.34 | 0.01 | 1068.34 | 0.65 | 0 |
| C104-20 | 2121.10 | 5.02 | 2118.96 | 15.15 | 0.1 |
| C104-30 | 3111.16 | 23.75 | No Sol | ||
| C104-40 | 4279.34 | 51.13 | No Sol | ||
| C104-50 | 5228.74 | 75.10 | No Sol | ||
| C104-60 | 6341.10 | 69.57 | No Sol | ||
| C104-70 | 7572.30 | 151.30 | No Sol | ||
| C104-80 | 8591.68 | 590.80 | No Sol | ||
| C104-90 | 9636.78 | 777.90 | No Sol | ||
| C104-100 | 10740.60 | 943.40 | No Sol | ||
| Parameter | Value |
|---|---|
| P | 20 EUR/Unit |
| 0.002 | |
| 0.003 | |
| 0.03 EUR/unit | |
| 0.04 EUR/unit | |
| 0.8 |
| Total Cost | Average Freshness | Service Level | Tardiness | |
|---|---|---|---|---|
| 18,294.37 | 62.17 | 29.02 | 1,455,295 | |
| 18,323.90 | 58.64 | 25.71 | 1,621,316 | |
| 18,256.38 | 62.02 | 30.06 | 1,498,330 | |
| 18,120.14 | 61.03 | 28.32 | 1,716,339 | |
| 18,277.78 | 62.12 | 30.71 | 1,328,918 | |
| 18,011.75 | 61.74 | 27.91 | 1,504,620 | |
| 18,179.60 | 61.08 | 27.16 | 1,467,776 | |
| 18,013.66 | 61.76 | 27.51 | 1,480,522 | |
| 17,966.30 | 61.66 | 26.87 | 1,562,182 |
| Rank | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| E-c | |||||||||
| P-c | |||||||||
| C-c |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Raoui, H.; Oudani, M.; Pelta, D.A.; El Hilali Alaoui, A. A Metaheuristic Based Approach for the Customer-Centric Perishable Food Distribution Problem. Electronics 2021, 10, 2018. https://doi.org/10.3390/electronics10162018
El Raoui H, Oudani M, Pelta DA, El Hilali Alaoui A. A Metaheuristic Based Approach for the Customer-Centric Perishable Food Distribution Problem. Electronics. 2021; 10(16):2018. https://doi.org/10.3390/electronics10162018
Chicago/Turabian StyleEl Raoui, Hanane, Mustapha Oudani, David A. Pelta, and Ahmed El Hilali Alaoui. 2021. "A Metaheuristic Based Approach for the Customer-Centric Perishable Food Distribution Problem" Electronics 10, no. 16: 2018. https://doi.org/10.3390/electronics10162018
APA StyleEl Raoui, H., Oudani, M., Pelta, D. A., & El Hilali Alaoui, A. (2021). A Metaheuristic Based Approach for the Customer-Centric Perishable Food Distribution Problem. Electronics, 10(16), 2018. https://doi.org/10.3390/electronics10162018