
Realization of Low-Voltage and High-Current Rectifier Module Control System Based on Nonlinear Feed-Forward PID Control



Abstract
:
1. Introduction
- (1)
- The nonlinear feed-forward PID control adopts the control idea of “disturbance feed-forward compensation”. It combines nonlinear PID control and feed-forward control to realize reasonable refinement of disturbance information. At the same time, disturbance information that is compensated to the control system achieves disturbance cancellation. Through the combination of feed-forward and feedback, it realizes the purposes of improving robustness and response speed of the system. Therefore, the control scheme, which has superior control performance, is highly suitable for rectifier systems of PMSG [23,24];The specific control process can be summarized as the following:
- First, rationalize the reference input signals. A non-smooth reference input signal should be transformed into a smooth signal because the output signals of the system can only be smooth. The function of the nonlinear tracking differentiator proposed by Professor Jingqing Han is to output a smooth tracking signal as the reference input signal;
- Second, computer technology is fully applied to generate high-quality differential signals. Since the computational speed and storage capacity of computers are increasing, more sophisticated algorithms can be utilized to generate high-quality differential signals [25];
- Third, the nonlinear combination of reasonable errors is utilized to generate the control signals in order to overcome the disadvantages of the linear combination. In a naturally occurring control system, the processing of error signals must be nonlinear. We can easily handle the nonlinearity by a computer;
- Finally, the introduction of feed-forward control greatly improves the response speed of the system while maintaining system stability [26].
- (2)
- The rectifier system can realize low-voltage and high-current DC power generation and high-power output;
- (3)
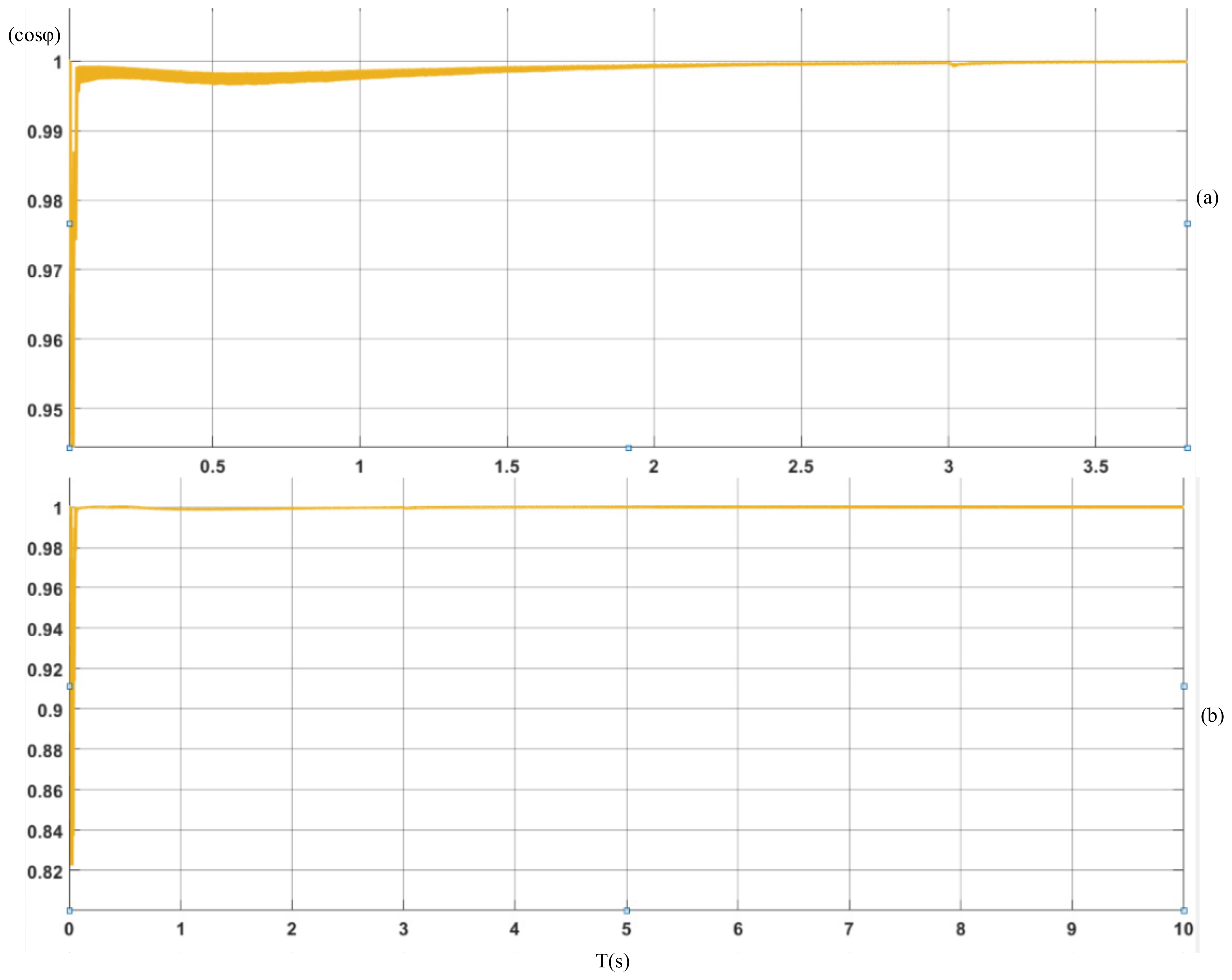
- The rectifier system achieves better dynamic and static performance, improves response speed and robustness, and maintains the high power factor operation after load mutation.
2. Methods
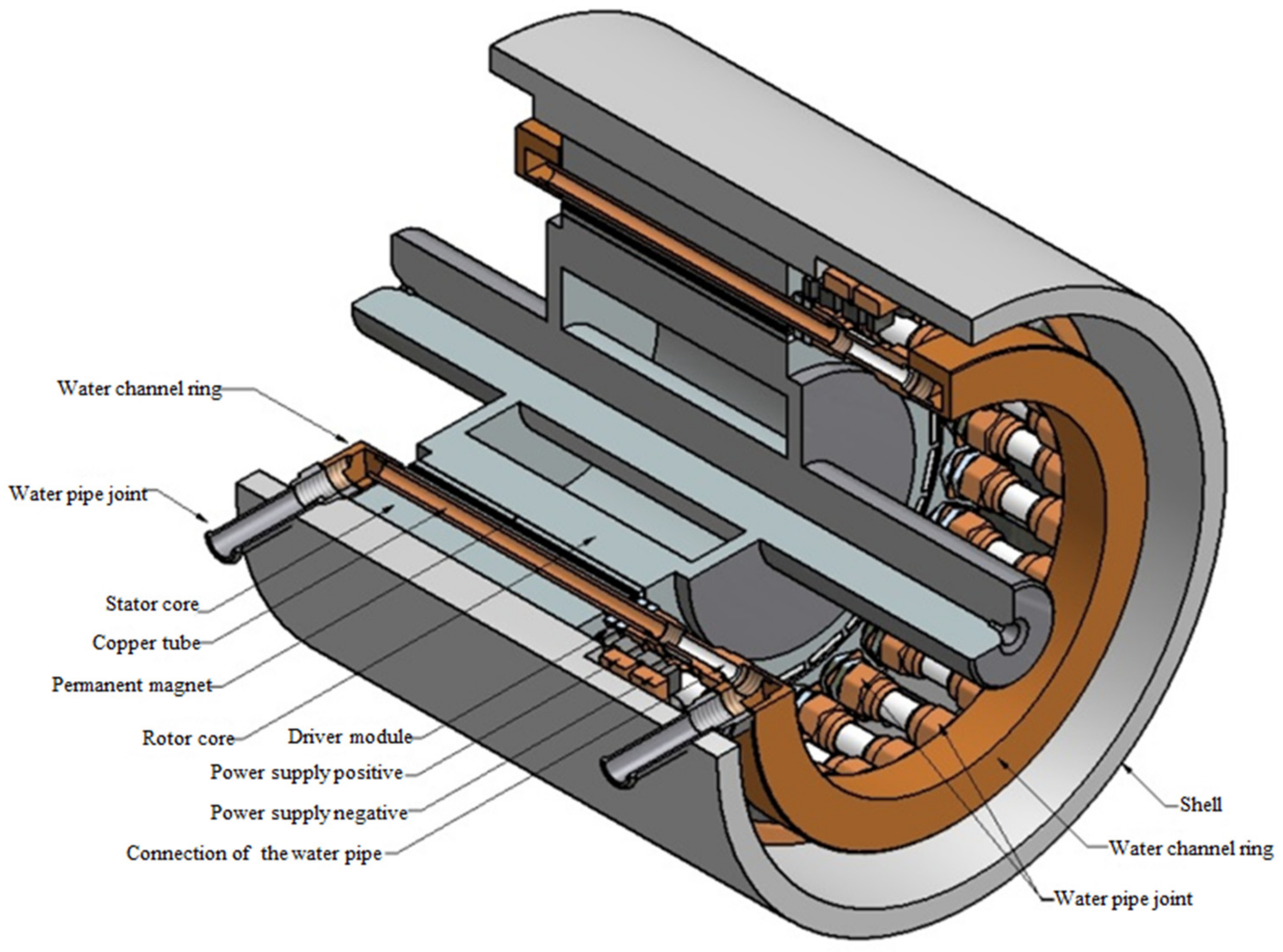
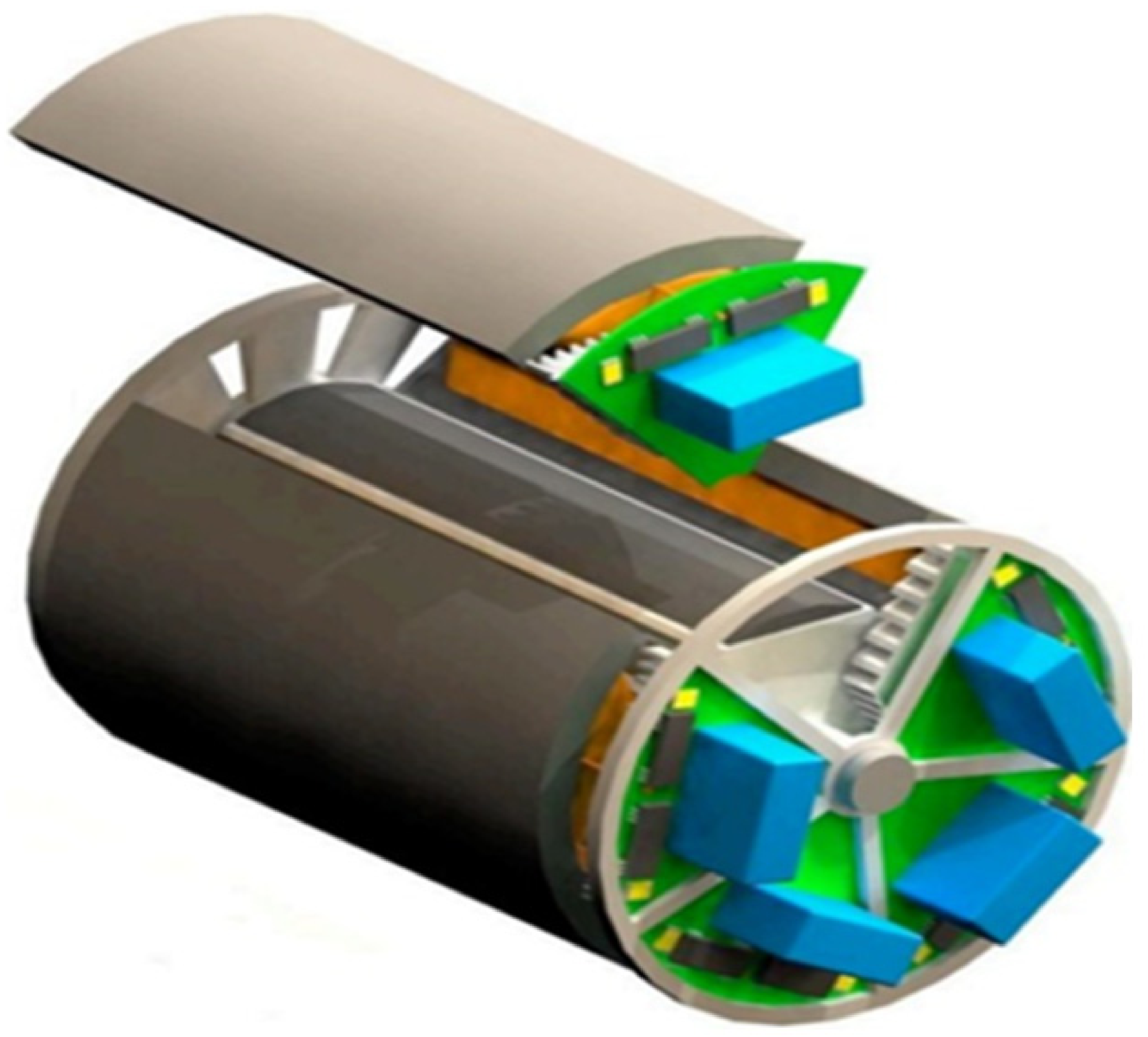
2.1. System Structure of a Low-Voltage and High-Current PMSG
2.2. Nonlinear Feed-Forward PID Control Algorithm
2.2.1. Nonlinear Tracking Differentiator
2.2.2. Nonlinear Combination
2.3. Parameter Setting
2.4. Mathematical Model of the Three-Phase Voltage Source PWM Rectifier in the d-q Synchronous Rotating Coordinate System
3. Results and Discussion
3.1. Simulation Waveforms Comparison and Analysis
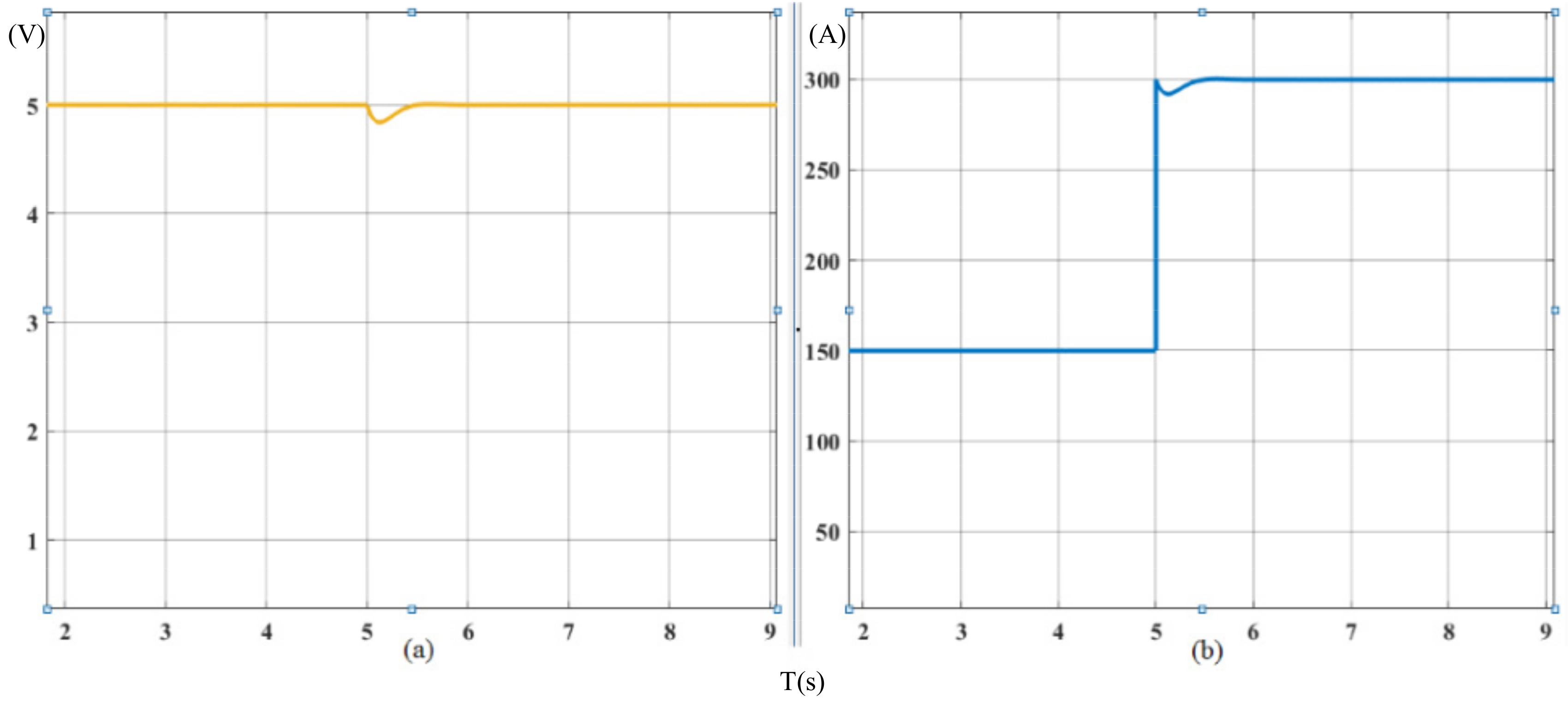
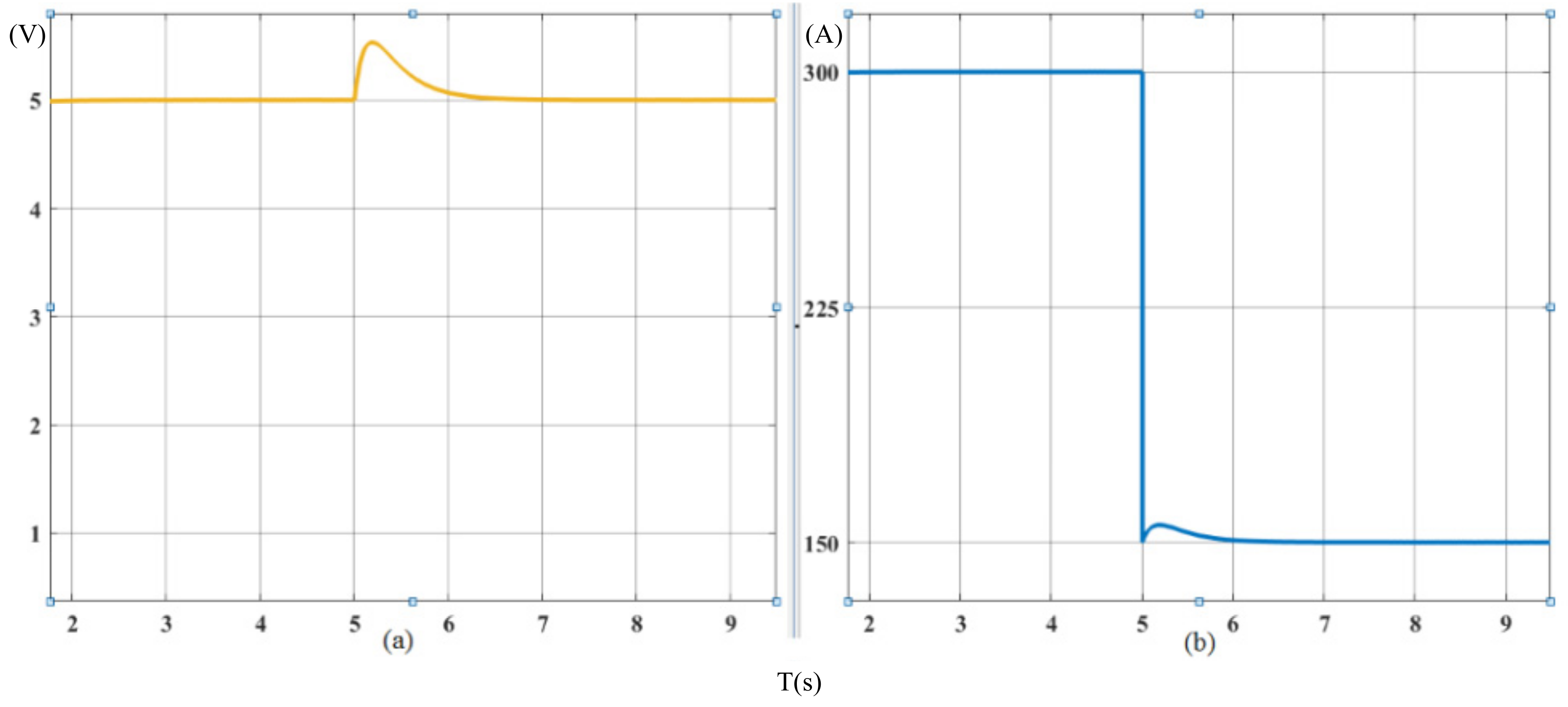
3.1.1. DC Output Waveforms
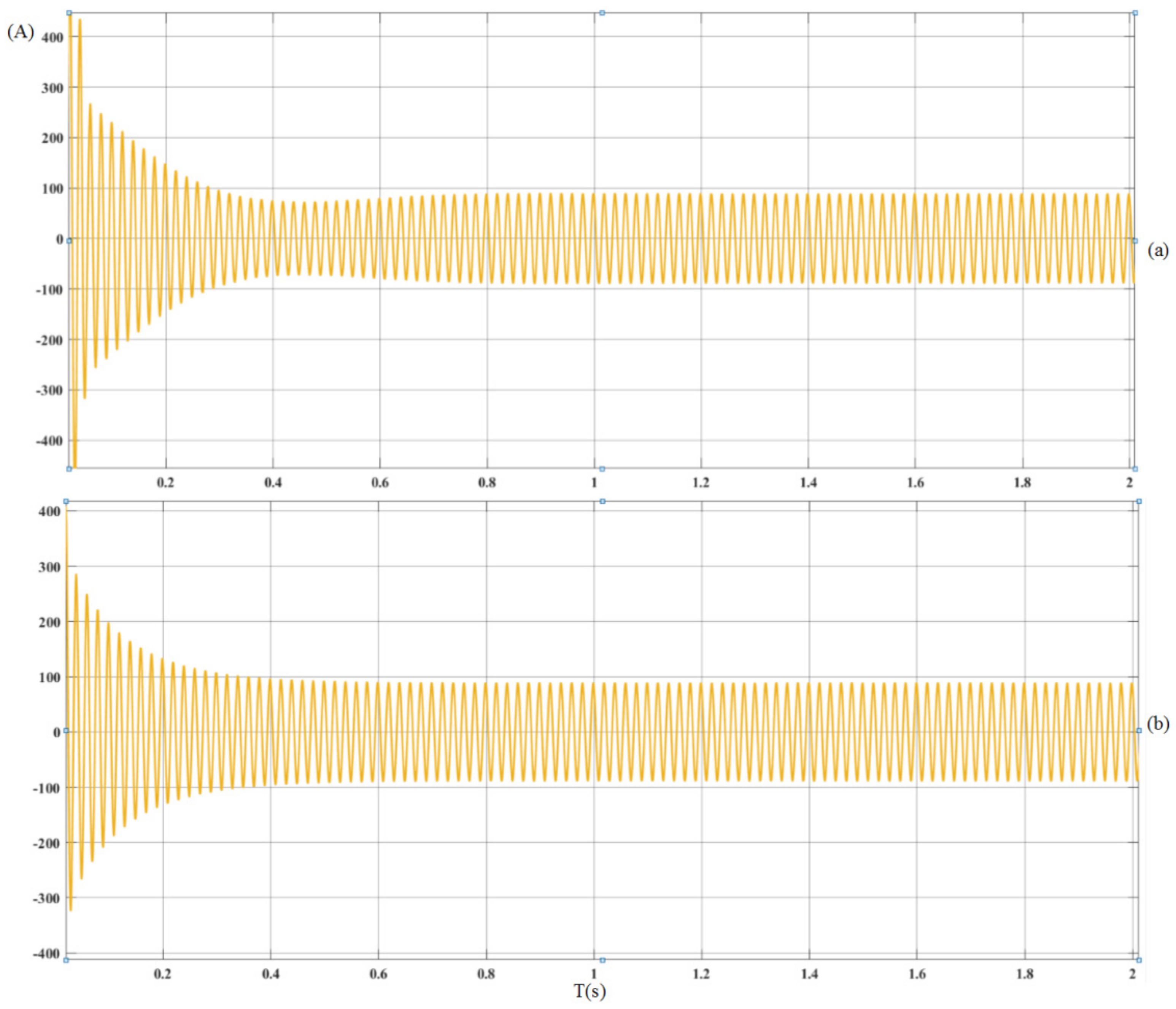
3.1.2. The AC Input Current Waveforms
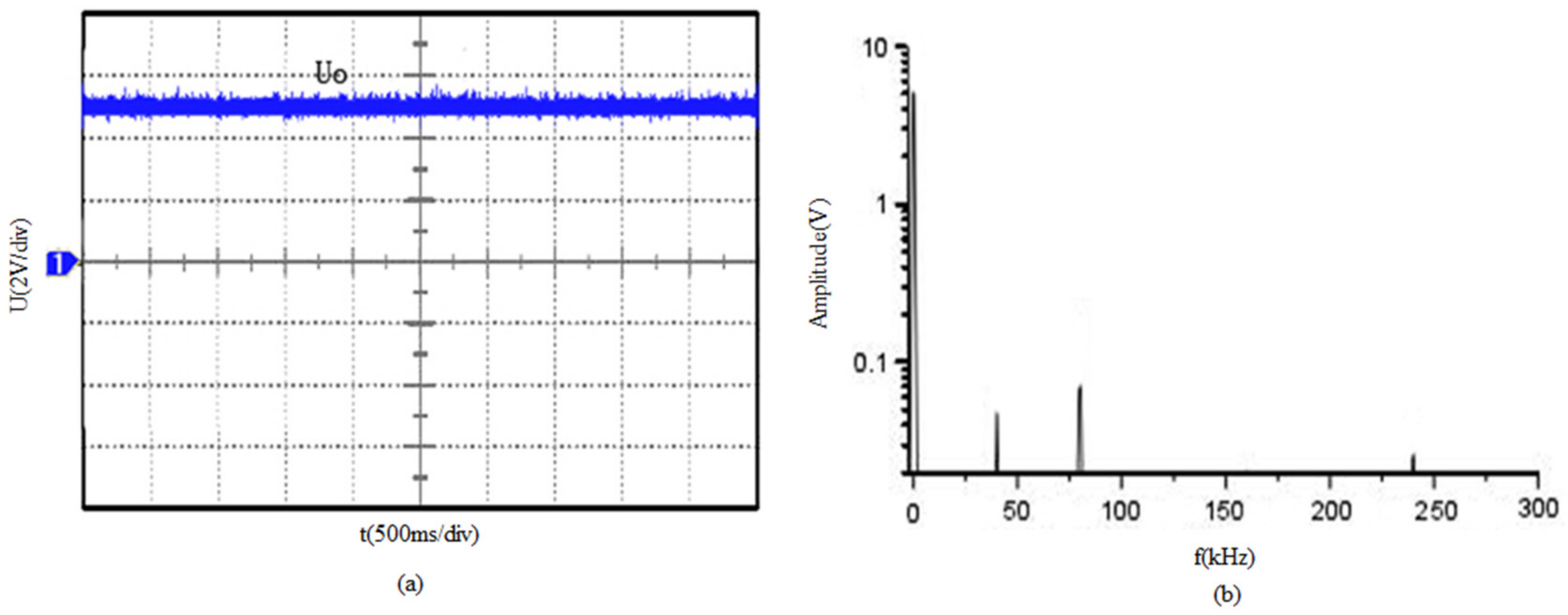
3.2. Verification of the Experimental Result
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shen, J.; Xin, B.; Cui, H.; Gao, W. Control of Single-Axis Rotation INS by Tracking Differentiator Based Fuzzy PID. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2976–2986. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, L. Theory and Design of PID Controller for Nonlinear Uncertain Systems. IEEE Control Syst. Lett. 2019, 3, 643–648. [Google Scholar] [CrossRef]
- Ge, J.; Zhao, Z.; Yuan, L.; Lü, T.; He, F. Direct Power Control Based on Natural Switching Surface for Three-Phase PWM Rectifiers. IEEE Trans. Power Electron. 2015, 30, 2918–2922. [Google Scholar] [CrossRef]
- Bouafia, A.; Krim, F.; Gaubert, J.-P. Fuzzy-Logic-Based Switching State Selection for Direct Power Control of Three-Phase PWM Rectifier. IEEE Trans. Ind. Electron. 2009, 56, 1984–1992. [Google Scholar] [CrossRef]
- Malinowski, M.; Kázmierkowski, M.; Hansen, S.; Blaabjerg, F.; Marques, G. Virtual-flux-based direct power control of three-phase PWM rectifiers. IEEE Trans. Ind. Appl. 2001, 37, 1019–1027. [Google Scholar] [CrossRef]
- Vazquez, S.; Sanchez, J.; Carrasco, J.; Leon, J.I.; Galvan, E. A Model-Based Direct Power Control for Three-Phase Power Converters. IEEE Trans. Ind. Electron. 2008, 55, 1647–1657. [Google Scholar] [CrossRef]
- Wang, J.H.; Li, H.D.; Wang, L.M. Direct power control system of three phase boost type PWM rectifiers. Proc. CSEE 2006, 26, 54–60. [Google Scholar]
- Zhang, Q.Q.; Zhao, Z.X.; Gu, S.H. The PWM rectifier with LCL filter direct power control based on power damping feedback. J. Vibroen Gineering 2021, 23, 51–55. [Google Scholar]
- Wang, X.D.; Liu, X.; Mo, Z.H.; Wen, J.; Xiong, Z.H. Novel model predictive direct power control strategy for grid-connected three-level NPC inverters. IET Power Electron. 2020, 13, 16–17. [Google Scholar] [CrossRef]
- Logenthiran, T.; Naayagi, R.T.; Woo, W.L.; Phan, V.; Abidi, K. Intelligent Control System for Microgrids Using Multiagent System. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1036–1045. [Google Scholar] [CrossRef]
- Cai, S.M.; Wang, Y.G.; Tian, T. Intelligent PID control algorithm research and Matlab implementation. Electron. Sci. Technol. 2016, 29, 43–46. [Google Scholar]
- Huang, M.G. Application of nonlinear PID control in intelligent control of double propeller and double rudder ships. Ship Sci. Technol. 2020, 42, 25–27. [Google Scholar]
- Zhao, L. Application of high voltage permanent magnet motor and remote frequency conversion intelligent control system. Mech. Manag. Dev. 2020, 35, 172–174. [Google Scholar]
- Liu, L.H. Research on PID control method based on intelligent control. J. Beijing Inst. Technol. 2012, 11, 33–38. [Google Scholar]
- Guan, H.M. Application of intelligent control algorithm in motor control. Inf. Rec. Mater. 2019, 20, 85–86. [Google Scholar]
- Tian, J.; Yang, L.; Xue, R. PWM speed regulation of DC motor based on intelligent control. Value Eng. 2019, 38, 142–144. [Google Scholar]
- Jung, J.; Leu, V.Q.; Do, T.D.; Kim, E.; Choi, H.H. Adaptive PID Speed Control Design for Permanent Magnet Synchronous Motor Drives. IEEE Trans. Power Electron. 2015, 30, 900–908. [Google Scholar] [CrossRef]
- Zhou, Y.; Zeng, Z.Z. Research on the principle of self-learning nonlinear PID disturbance rejection control. Control Eng. 2017, 24, 1180–1185. [Google Scholar]
- Wang, R.T.; Zeng, Y.Z.; Su, X.K. Research on single phase PWM rectifier based on nonlinear PID control theory. Electr. Meas. Instrum. 2017, 54, 113–116. [Google Scholar]
- Lei, Z.; Zhou, Y. A kind of nonlinear PID controller for Refrigeration Systems based on Vapour Compression. IFAC PapersOnLine 2018, 51, 716–721. [Google Scholar] [CrossRef]
- So, G.B.; Jin, G.G. Fuzzy-based nonlinear PID controller and its application to CSTR. Korean J. Chem. Eng. 2018, 35, 819–825. [Google Scholar] [CrossRef]
- Yan, H.L.; Li, J.P.; Li, L.M. Design of active disturbance rejection controller for PMSG servo system. J. Terahertz Sci. Electron. Inf. 2021, 19, 138. [Google Scholar]
- Shi, Y.L.; Hou, C.Z. Design of improved nonlinear tracking differentiator. Control. Decis. 2008, 23, 647–650. [Google Scholar]
- Han, J.Q.; Wang, W. Nonlinear tracking differentiator. Syst. Sci. Math. 1994, 14, 177–183. [Google Scholar]
- Liu, Y.B.; Jia, Q.; Zhang, F.; Zhang, X.H.; Zhang, J.Z. Research and Simulation of There-phase Vienna Rectifier Based on Feedforward Decoupling Control. J. Phys. Conf. Ser. 2021, 1885, 35–37. [Google Scholar] [CrossRef]
- Wu, H. A Feedforward Decoupling Control Method for Multi-ports DC Transformer. J. Phys. Conf. Ser. 2021, 1732, 255–259. [Google Scholar]
- Ma, R.B.; Lin, Y. Selection of driving motor for pure electric passenger car. Automot. Eng. 2010, 24, 46–48. [Google Scholar]
- Fan, Z.C.; Yu, Q.G.; Zhang, X.M. Double stator winding synchronous motor and its single winding equivalent model. J. Electrotech. 2007, 22, 2–8. [Google Scholar]
- Wang, Q.; Zhang, J.; Ruan, X.B. Isolated Single Primary Winding Multiple-Input Converters. IEEE Trans. Power Electron. 2011, 26, 3435–3442. [Google Scholar] [CrossRef]
- Liu, Z.G. Design of improved tracking differentiator. Navig. Control. 2018, 17, 61–65. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Three-phase input line voltage, e | 4.2 V |
| Three-phase input voltage frequency, f | 50 Hz |
| Switching frequency, f | 20 kHz |
| DC-bus capacitor, C | 2200 μF |
| DC-bus voltage, udc | 5 V |
| AC-bus equivalent inductance, L | 1.5 mH |
| Load resistance, RL | 32 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; He, J.; Iu, H.H.-C. Realization of Low-Voltage and High-Current Rectifier Module Control System Based on Nonlinear Feed-Forward PID Control. Electronics 2021, 10, 2138. https://doi.org/10.3390/electronics10172138
Liu J, He J, Iu HH-C. Realization of Low-Voltage and High-Current Rectifier Module Control System Based on Nonlinear Feed-Forward PID Control. Electronics. 2021; 10(17):2138. https://doi.org/10.3390/electronics10172138
Chicago/Turabian StyleLiu, Jinfeng, Jiawei He, and Herbert Ho-Ching Iu. 2021. "Realization of Low-Voltage and High-Current Rectifier Module Control System Based on Nonlinear Feed-Forward PID Control" Electronics 10, no. 17: 2138. https://doi.org/10.3390/electronics10172138
APA StyleLiu, J., He, J., & Iu, H. H. -C. (2021). Realization of Low-Voltage and High-Current Rectifier Module Control System Based on Nonlinear Feed-Forward PID Control. Electronics, 10(17), 2138. https://doi.org/10.3390/electronics10172138