
Electric Motors for Variable-Speed Drive of Lock Valves


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A high degree of protection from the environment. As a rule, motors and control systems are designed with protection no less than IP54 (closed, protected design allowing the presence of water jets at any point on the outer surface of a technical object);
- Significant excess of the maximum torque at start, in comparison with the nominal value with free movement of the stem. Therefore, examining a high-pressure steam valve with a setup diameter of 20 mm, it was found that in the nominal mode, the torque of 5–10 Nm is required (depending on the equipment wear), and when the “slagged” stem is torn off in the closed state, the torque increases to 80 Nm;
- Low speed of the drive output shaft at the level of 10–20 rpm, which should exclude the possibility of hydrodynamic shock. Therefore, in drives that do not provide for speed variation and operating in the “start-stop” mode, it is necessary to use gearboxes with a large gear ratio. Traditionally, in such valves, asynchronous motors are most often used. They are designed for an output shaft speed of 1000 rpm and 1500 rpm. Therefore, for them, the minimum value of the reduction factor is 50 units, and this is a rather complex and expensive technical object;
- There are practically no requirements regarding the limitations of the dimensions and weight of the electric actuator of lock valves;
- Difficult access to many objects of the lock valves. This feature is most significantly manifested in heating plants, as well as in the areas of oil and gas pipelines remote from settlements;
- High reliability of protection of motor windings from overheating and maximum permissible currents.
- When connected to an industrial network of alternating current 50 Hz (or 60 Hz), the shaft rotation frequency will be 10–120 rpm, which will either get rid of the gearbox in the drive kinematic diagram, or eliminate the problem of developing a complex mechanical transmission;
- The value of the specific moment (the ratio of the moment to the mass of the drive) is comparable to that of a drive containing an asynchronous motor and a gearbox [42];
- There are no moving contacts due to the presence of a collector, slip rings, etc. This condition is most significant when it comes to the explosion-proof version of the drive;
- The value of the phase current varies in a small range for all modes of operation, from no-load to short-circuit. If this condition is met, then it becomes possible to remove the current and thermal protection from the drive and not to introduce into the control system a time limit for the specified movement.
2. Mathematical Model
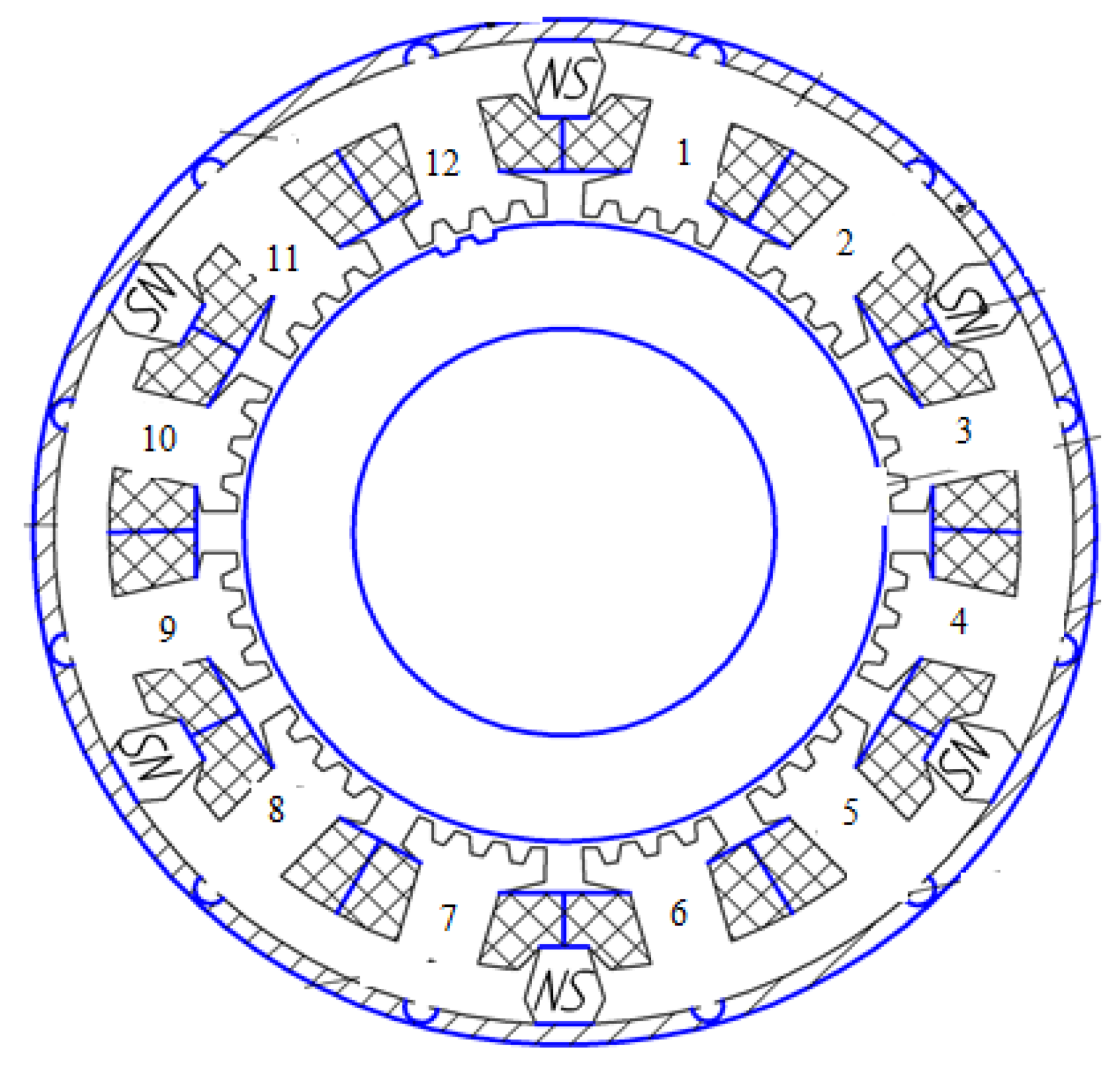
- To develop a large unipolar flux, it is necessary to increase to the limit the ratio of the bore diameter to the inner diameter of the rotor. Otherwise, it is necessary to reduce the length of each stator (rotor) package or to develop a multi-package structure. However, such a step entails a relative increase in the non-working zones (between packets) and, as a consequence, a decrease in the specific moment;
- To close the unipolar flux along the stator, a massive ferromagnetic housing is required to eliminate this negative factor, the French company SAGEM makes the stator packages not lined but limits the maximum rotational speed to 18–20 rpm;
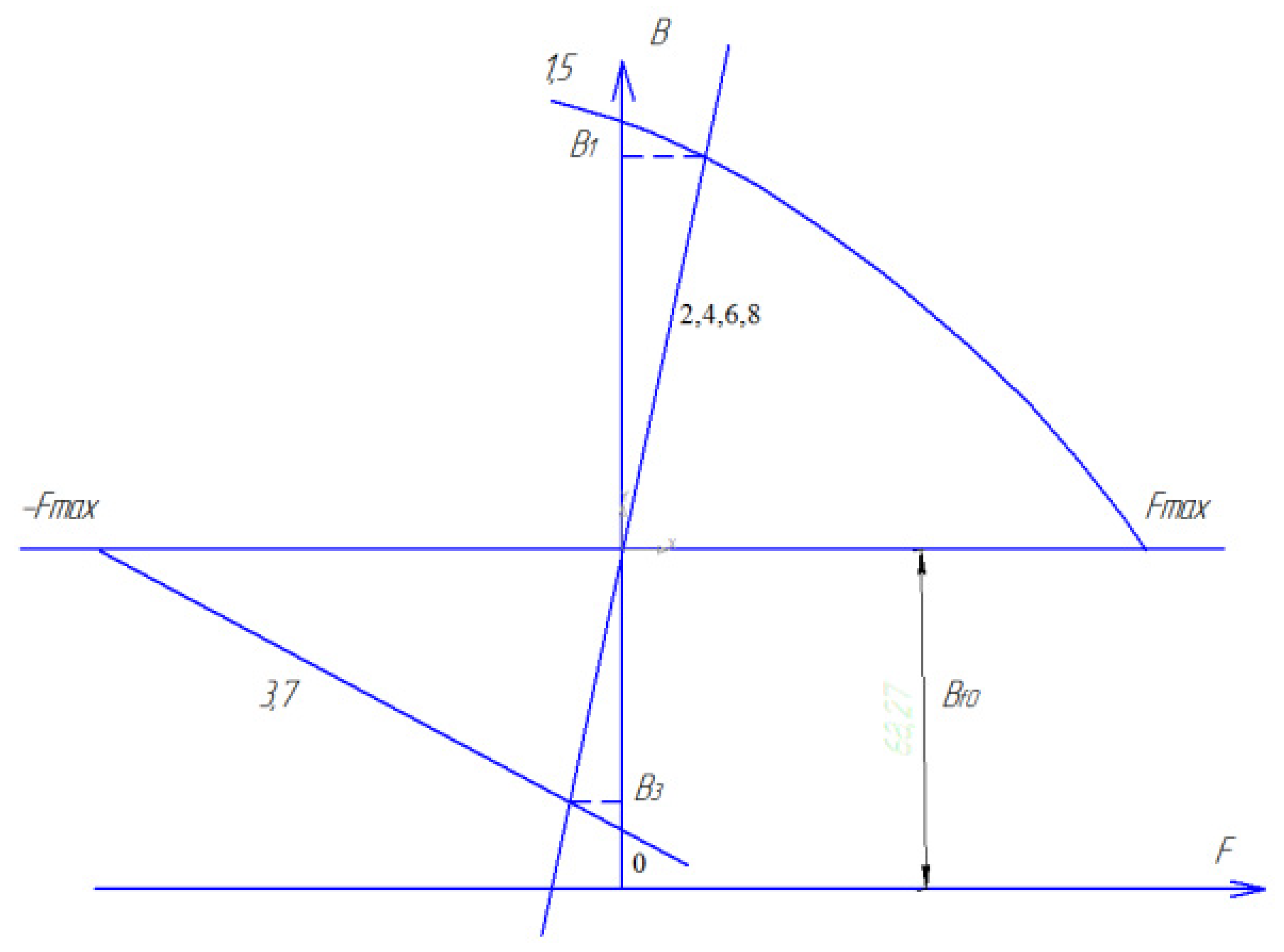
- With a small cross-section of the groove, it is impossible to develop an armature flux of the required magnitude, since it closes along a long path (a quarter of the circumference) with high magnetic resistance. Additional decrease is due to the branching of magnetic field lines in the area where there are no currents (2, 4, 6, 8; Figure 1), which is clearly demonstrated by the problem in the graphic-analytical calculation of the field.
3. Control Algorithm
4. Analysis
5. Results
- Rated torque-32 Nm;
- Maximum torque-64 Nm;
- Nominal electrical losses-35 W;
- Maximum electrical losses at start-up-350 W;
- Maximum power consumption-600 W;
- Rated frequency of rotation of the output shaft of the engine-60 rpm;
- Maximum rotational speed of the engine output shaft-130 rpm;
- Outside length of the electric mechanism-100 mm;
- The outer diameter of the electric mechanism-126 mm;
- Gear ratio-4.95;
- Total weight-4.3 kg.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Krušelja, D.; Sumina, D. Modified predictive torque control method of induction machines for torque ripple reduction. Automatika 2019, 60, 227–238. [Google Scholar] [CrossRef]
- Nash, J.N. Direct torque control, induction motor vector control without an encoder. IEEE Trans. Ind. Appl. 1997, 33, 333–341. [Google Scholar] [CrossRef]
- Casadei, D.; Profumo, F.; Serra, G. FOC and DTC: Two viable schemes for induction motors torque control. IEEE Trans. Power Electron. 2002, 17, 779–787. [Google Scholar] [CrossRef] [Green Version]
- Depenbrock, M. Direkte Selbstregelung (DSR) für hochdynamische Drehfeldantriebe mit Stromrichter-speisung. Etz-Archiv 1985, 7, 211–218. [Google Scholar]
- Depenbrock, M. Direct self-control (DSC) of inverterfed induction machine. IEEE Trans. Power Electron. 1988, 3, 420–429. [Google Scholar] [CrossRef]
- Takahashi, I.; Noguchi, T. A new quick-response and high-efficiency control strategy of an induction motor. IEEE Trans. Ind. Appl. 1986, IA-22, 820–827. [Google Scholar] [CrossRef]
- Tiitinen, P.; Pohjalainen, P.; Lalu, J. The next generation motor control method: Direct torque control (DTC). Eur. Power Electr. Drives J. 1995, 5, 14–18. [Google Scholar]
- Sutikno, T.; Idris, N.R.N. A review of direct torque control of induction motors for sustainable reliability and energy efficient drives. Renew. Sustain. Energy Rev. 2014, 32, 548–558. [Google Scholar] [CrossRef]
- Kumar, R.H.; Iqbal, A.; Lenin, N.C. Review of recent advancements of direct torque control in induction motor drives—A decade of progress. IET Power Electron. 2018, 11, 1–15. [Google Scholar] [CrossRef]
- Cortes, P.; Kaztnierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodriguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Kouro, S.; Cortes, P.; Vargas, R.; Ammann, U.; Rodriguez, J. Model predictive control—a simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Bariša, T.; Ileš, Š.; Sumina, D.; Matuško, J. Model predictive direct current control of a permanent magnet synchronous generator based on Flexible Lyapunov function considering converter dead time. IEEE Trans. Ind. Appl. 2018, 54, 2899–2912. [Google Scholar] [CrossRef]
- Kuoro, S.; Perez, M.; Rodríguez, J.; Llor, A.; Young, H. Model predictive control: MPC’s Role in the Evolution of power electronics. IEEE Ind. Electron. Mag. 2015, 9, 8–21. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model predictive control for power converters and drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Davari, S.A.; Chen, Z.; Zhang, Z.; Khaburi, D.A.; Rodrieguez, J.; Kennel, R. Finite control set model predictive control of induction machine with a robust adaptive observer. IEEE Trans. Ind. Electron. 2017, 64, 2631–2641. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-vector-based model predictive torque control without weighting factors for induction motor drives. IEEE Trans. Power Electron. 2016, 31, 381–1390. [Google Scholar] [CrossRef]
- Nikzad, M.R.; Asaei, B.; Ahmadi, S.O. Discrete dutycycle-control method for direct torque control of induction motor drives with model predictive solution. IEEE Trans. Power Electron. 2018, 33, 2317–2329. [Google Scholar] [CrossRef]
- Cortés, P.; Kuoro, S.; La Rocca, B.; Vargas, R.; Rodríguez, J.; Leon, J.I.; Vazquez, S.; Franquelo, L.G. Guidelines for weighting factors adjustment in finite state model predictive control of power converters and drives. In Proceedings of the IEEE Conference Industrial Technology, Gippsland, Australia, 10–13 February 2009; pp. 1–7. [Google Scholar]
- Sabir, A.; Ibrir, S. Induction motor speed control using reduced-order model. Automatika 2018, 59, 274–285. [Google Scholar] [CrossRef]
- Fekih, A.; Chowdhury, F.N. On nonlinear control of induction motors: Comparison of two approaches. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 1, pp. 1135–1140. [Google Scholar]
- Barambones, O.; Alkorta, P. Vector control for induction motor drives based on adaptive variable structure control algorithm. Asian J. Control 2010, 12, 640–649. [Google Scholar] [CrossRef]
- Retière, N.; Foggia, A.; Roye, D.; Mannevy, P. Deep-bar induction motor model for large transient analysis under saturated conditions. In Proceedings of the 1997 IEEE International Electric Machines and Drives Conference Record, Milwaukee, WI, USA, 18–21 May 1997; IEEE: Piscataway, NJ, USA, 1997. [Google Scholar]
- Binga, L.; Shib, L.; Teng, L. Duty ratio modulation direct torque control of brushless doubly-fed machines. Automatika 2017, 58, 479–486. [Google Scholar] [CrossRef] [Green Version]
- Jerčić, T.; Ileš, Š.; Žarko, D. Constrained field-oriented control of permanent magnet synchronous machine with field-weakening utilizing a reference governor. Automatika 2017, 58, 439–449. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Nam, K.; Choi, S.; Kwon, S. A lookup table based loss minimizing control for FCEV permanent magnet synchronous motors. In Proceedings of the Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; VPPC 2007. IEEE: Piscataway, NJ, USA, 2007; pp. 175–179. [Google Scholar]
- Jung, S.Y.; Hong, J.; Nam, K. Current minimizing torque control of the IPMSM using Ferrari’s method. IEEE Trans. Power Electron. 2013, 28, 5603–5617. [Google Scholar] [CrossRef]
- Cao, M. Online loss minimization control of IPMSM for electric scooters. In Proceedings of the Power Electronics Conference (IPEC), 2010 International, Sapporo, Japan, 21–24 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1388–1392. [Google Scholar]
- Uddin, M.N.; Zou, H.; Azevedo, F. Online loss-minimization-based adaptive flux observer for direct torque and flux control of PMSM drive. IEEE Trans. Ind. Appl. 2016, 52, 425–431. [Google Scholar] [CrossRef]
- Qi, Z.; Shi, Q.; Zhang, H. Tuning of Digital PID Controllers Using Particle Swarm Optimization Algorithm for a CAN-Based DC Motor Subject to Stochastic Delays. IEEE Trans. Ind. Electron. 2019, 67, 5637–5646. [Google Scholar] [CrossRef]
- Chen, J.; Shuai, Z.; Zhang, H.; Zhao, W. Path Following Control of Autonomous Four-Wheel-Independent-Drive Electric Vehicles via Second-Order Sliding Mode and Nonlinear Disturbance Observer Techniques. IEEE Trans. Ind. Electron. 2020, 68, 2460–2469. [Google Scholar] [CrossRef]
- Ćalasan, P. An invertible dependence of the speed and time of the induction machine during no-load direct start-up. Automatika 2019, 61, 141–149. [Google Scholar] [CrossRef] [Green Version]
- Aree, P. Precise analytical formula for starting time calculation of medium- and high-voltage induction motors under conventional starter methods. Electr. Eng. 2018, 100, 1195–1203. [Google Scholar] [CrossRef]
- Calasan, M. Analytical solution for no-load induction machine speed calculation during direct start-up. Int. Trans. Electr. Energy Syst. 2019, 29, e2777. [Google Scholar] [CrossRef]
- Solveson, M.G.; Mirafzal, B.; Demerdash, N.A.O. Soft-started induction motor modeling and heating issues for different starting profiles using a flux linkage ABC frame of reference. IEEE Trans. Ind. Appl. 2006, 42, 973–982. [Google Scholar] [CrossRef]
- Badr, M.A.; Abdel-Halim, M.A.; Alolah, A.I. A nonconven-tional method for fast starting of three phase wound-rotor induction motors. IEEE Trans. Energy Convers. 1996, 11, 701–707. [Google Scholar] [CrossRef]
- Pillay, K.; Nour, M.; Yang, K.H.; Harun, D.D.; Haw, L.K. Assessment and comparison of conventional motor starters and modern power electronic drives for induction motor starting characteristics. IEEE Symp. Ind. Electron. Appl. 2009, 2, 584–589. [Google Scholar]
- Čeřovský, Z.; Lev, M. Permanent Magnet Synchronous Machine Parameters Identification for Load Characteristics Calculation. Automatika 2015, 56, 217–225. [Google Scholar] [CrossRef] [Green Version]
- Chekhov, R.F. Official Site of the Closed Joint Stock Company Energomash. Available online: www.zavodchzem.ru (accessed on 21 September 2021).
- Calabrese, D.; Tricarico, G.; Brescia, E.; Cascella, G.L.; Monopoli, V.G.; Cupertino, F. Variable Structure Control of a Small Ducted Wind Turbine in the Whole Wind Speed Range Using a Luenberger Observer. Energies 2020, 13, 4647. [Google Scholar] [CrossRef]
- Brescia, E.; Palmieri, M.; Cascella, G.L.; Cupertino, F. Optimal Tooth Tips Design for Cogging Torque Suppression of Permanent Magnet Machines with a Segmented Stator Core. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 1930–1936. [Google Scholar] [CrossRef]
- Brescia, E.; Costantino, D.; Massenio, P.R.; Monopoli, V.G.; Cupertino, F.; Cascella, G.L. A Design Method for the Cogging Torque Minimization of Permanent Magnet Machines with a Segmented Stator Core Based on ANN Surrogate Models. Energies 2021, 14, 1880. [Google Scholar] [CrossRef]
- Antonov, A.S.; Artamonov, B.A.; Korobkov, B.M. Planetary Gears//Tank.-M.: Military Publishing, 1954; pp. 422–607. Available online: https://www.preprints.org/manuscript/202110.0189/download/final_file (accessed on 21 September 2021).
- Kaluzhskii, D.L.; Makarov, D.V.; Mekhtiev, A.D. Inductor Motor with Axial Excitation Flux. In Proceedings of the 17th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices (EDM-2016), Erlagol, Russia, 30 June–4 July 2016; pp. 503–506. [Google Scholar]
- Veselovsky, O.N.; Kalushski, D.L. Equations of Electrical Equilibrium and Torque of Synchronous and Asynchronous Motors with Discretely Distributed Windings. Electricity 2000, 5, 31–36. Available online: https://www.elibrary.ru/item.asp?id=34917727 (accessed on 21 September 2021).
- Kalushski, D.L.; Strizhkov, A.M.; Galimzyanov, A.T. Comparative Analysis of High-Torque Engines. On Sat. Scientific. Works of the City of Yekaterinburg, FGAOU VPO UrFu Named after B, N. Yeltsin 2011; 329p. Available online: http://www.rudocs.exdat.com/docs/index-49797.html (accessed on 21 September 2021).
- A.C. No. 1481875 USSR. Synchronous Electric Motor/Zhulovyan, V.V.; Geraskina, N.M.; Kalushski, D.L.; Novikov, P.A.; Markov, Y.u.L.; Kutuzov, E.I. Bul. No. 19, 1989. Available online: https://patents.su/3-1481875-sinkhronnyjj-ehlektrodvigatel.html (accessed on 21 September 2021).
- Kalushski, D.L.; Strizhkov, A.M.; Kharitonov, S.A. Equations of Electrical Equilibrium and Torque of a Reactive Inductor Motor. Electricity 2010, 5, 43–48. Available online: https://www.elibrary.ru/item.asp?id=13519707 (accessed on 21 September 2021).
- Permanent Magnet Synchronous Inductor Motor/Kalushski, D.L.; Shepherds, V.V.; Ponds, N.M. Utility Model Patent No. 125414 Dated 05.06.12. Available online: https://new.fips.ru/Archive/PAT/2013FULL/2013.02.27/DOC/RUNWU1/000/000/000/125/414/DOCUMENT.PDF (accessed on 21 September 2021).
- Kalushski, D.L.; Strizhkov, A.M.; Galimzyanov, A.T. Equations of Electrical Equilibrium and Torque of a Two-Phase Inductor Motor. Electricity 2010, 8, 59–63. Available online: https://www.elibrary.ru/item.asp?id=15056054 (accessed on 21 September 2021).








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Udovichenko, A.V.; Kaluzhskij, D.; Uvarov, N.; Mekhtiyev, A. Electric Motors for Variable-Speed Drive of Lock Valves. Electronics 2021, 10, 2727. https://doi.org/10.3390/electronics10212727
Udovichenko AV, Kaluzhskij D, Uvarov N, Mekhtiyev A. Electric Motors for Variable-Speed Drive of Lock Valves. Electronics. 2021; 10(21):2727. https://doi.org/10.3390/electronics10212727
Chicago/Turabian StyleUdovichenko, Aleksey V., Dmitri Kaluzhskij, Nikita Uvarov, and Ali Mekhtiyev. 2021. "Electric Motors for Variable-Speed Drive of Lock Valves" Electronics 10, no. 21: 2727. https://doi.org/10.3390/electronics10212727
APA StyleUdovichenko, A. V., Kaluzhskij, D., Uvarov, N., & Mekhtiyev, A. (2021). Electric Motors for Variable-Speed Drive of Lock Valves. Electronics, 10(21), 2727. https://doi.org/10.3390/electronics10212727