
Testability Evaluation in Time-Variant Circuits: A New Graphical Method






Abstract
:1. Introduction
2. Theoretical Concepts
2.1. Testability Analysis
- Each CAG is an FC if all the CAGs of order 2 do not intersect;
- Each GAG constituted by CAGs of order 2 intersecting each other are considered an FC.
2.2. Testability Analysis of DC–DC Converters
3. Methods for Testability Analysis
3.1. First Method: Analitycal Evaluation of Testability
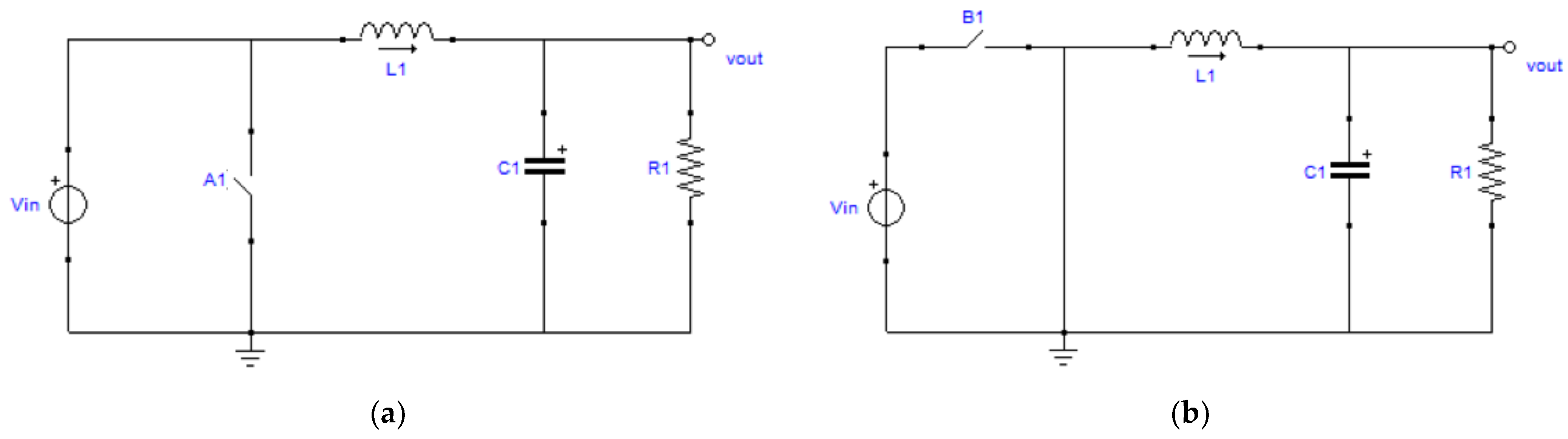
- choice of a specific working phase (i.e., a specific state of the switches) and its sampling in n different instants;
- determination of the vector corresponding to the constant input samples;
- determination of the output sample vector,
- determination of the fault diagnosis equation:
- determination of testability value through the Jacobian matrix of the fault equations evaluated at the nominal values of the circuit parameters ;
- determination of CAGs corresponding to the minimal sets of linearly dependent columns of the Jacobian matrix.
3.2. Second Method: Graphical Evaluation of Testability
- and hence ;
- and then there must exist exactly one such that ; this means that, if , then the circuit is healthy, if and , then the circuit is faulty and is the fault source.
4. Classification Tool
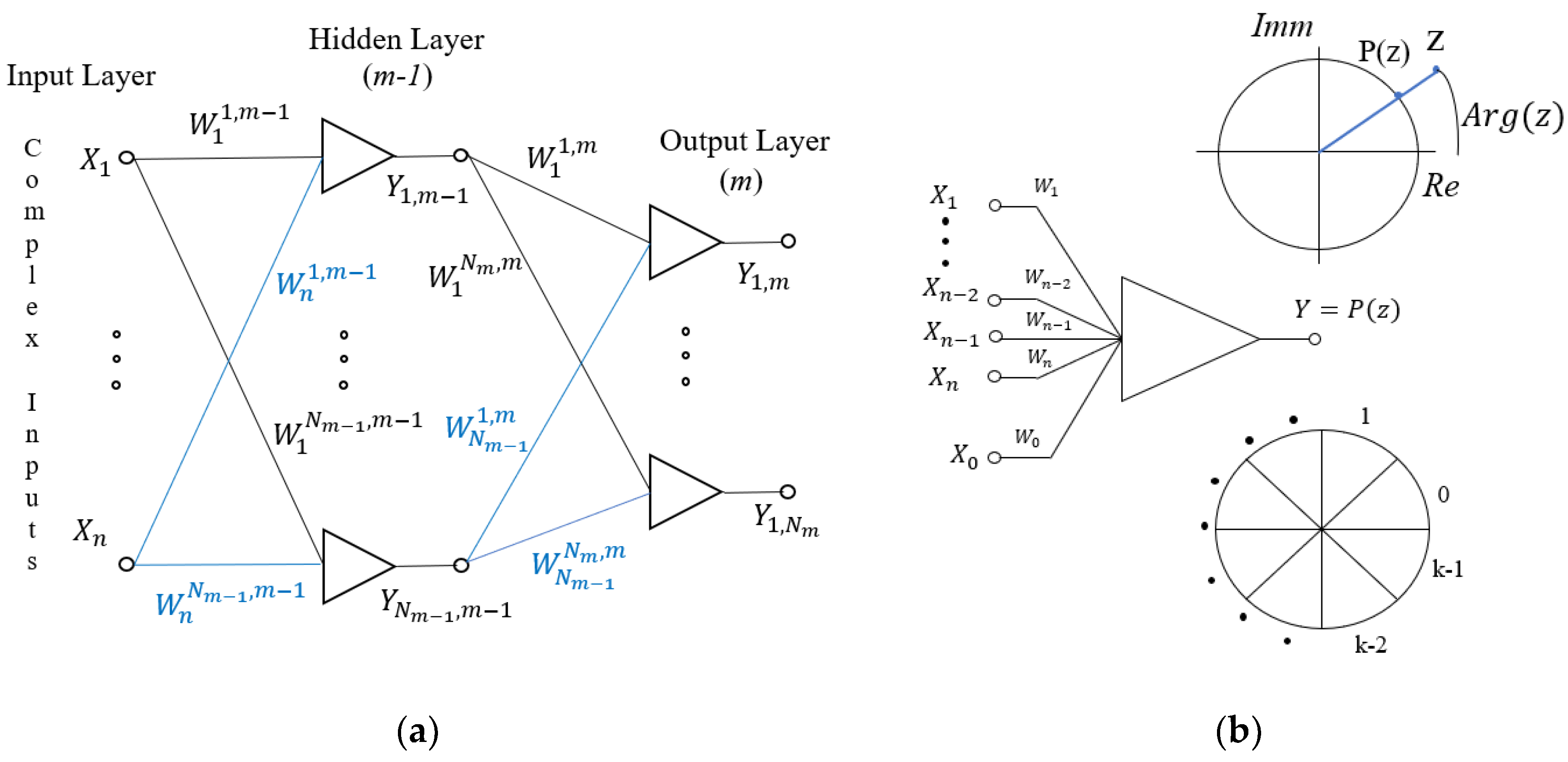
4.1. Multilayer Neural Network with Multi-Valued Neurons
4.2. Diagnostic Procedure
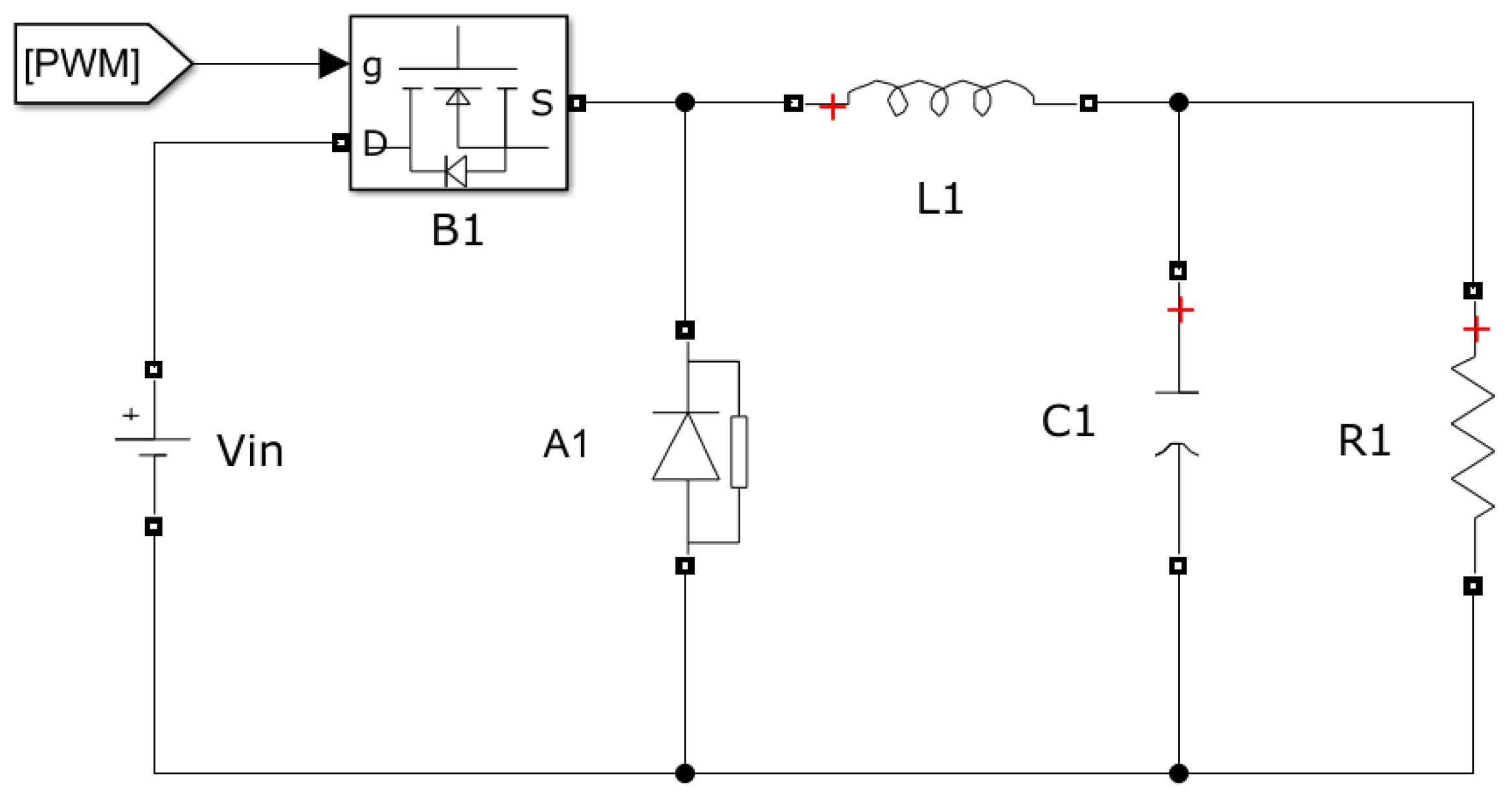
- definition of the converter topology;
- definition of the nominal value for each passive component and application of a specific tolerance;
- testability analysis and subsequent selection of test points in order to classify as many components as possible;
- according to the testability analysis, the distinguishable components are considered as variable terms, while other components are fixed to their nominal values;
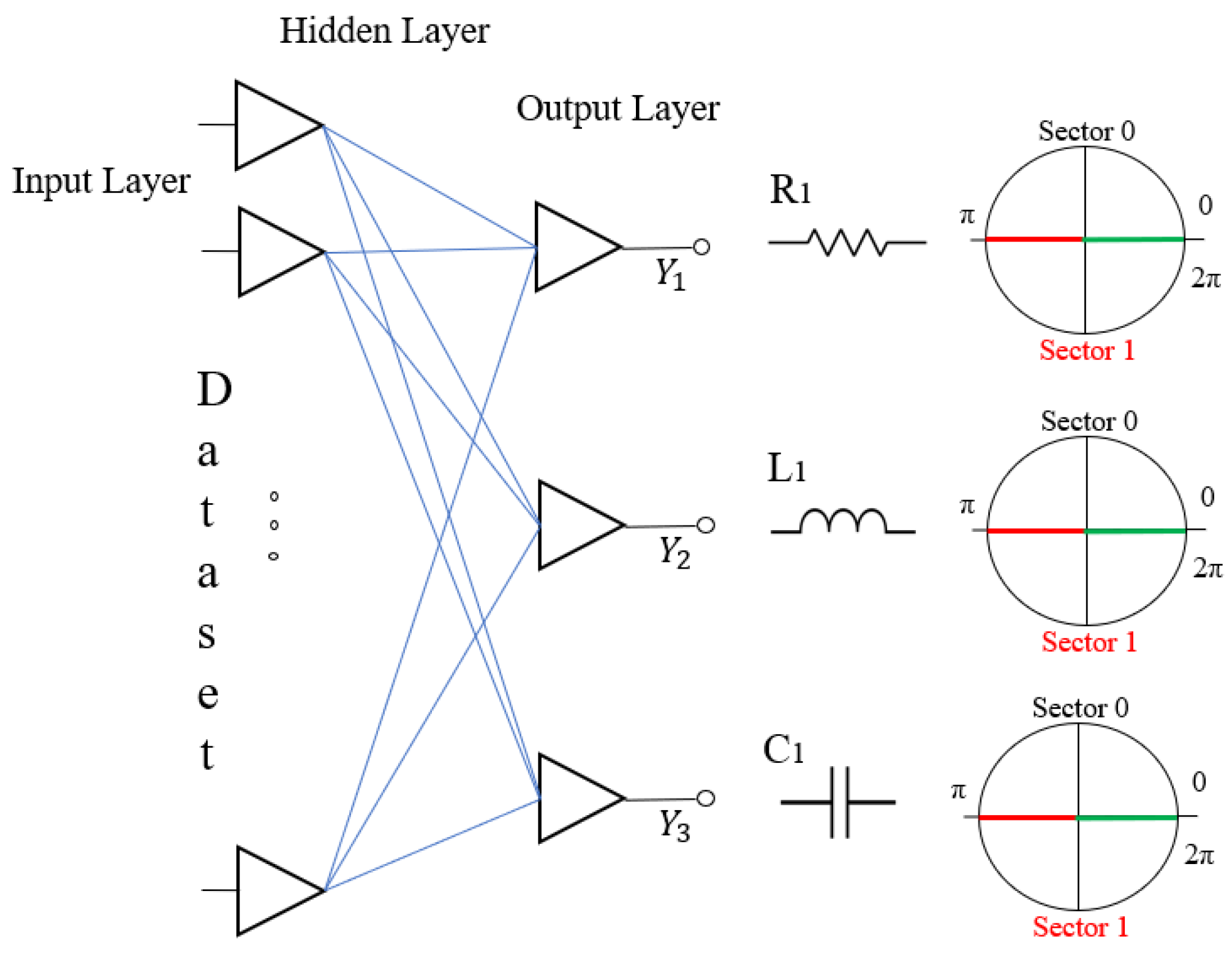
- creation of the neural classifier used as neurons in the output layer as the number of potentially faulty components;
- creation of the dataset matrix;
- learning phase of the MLMVN;
- validation and test phase.
5. Application Examples
5.1. Testability Analysis of a Buck Converter
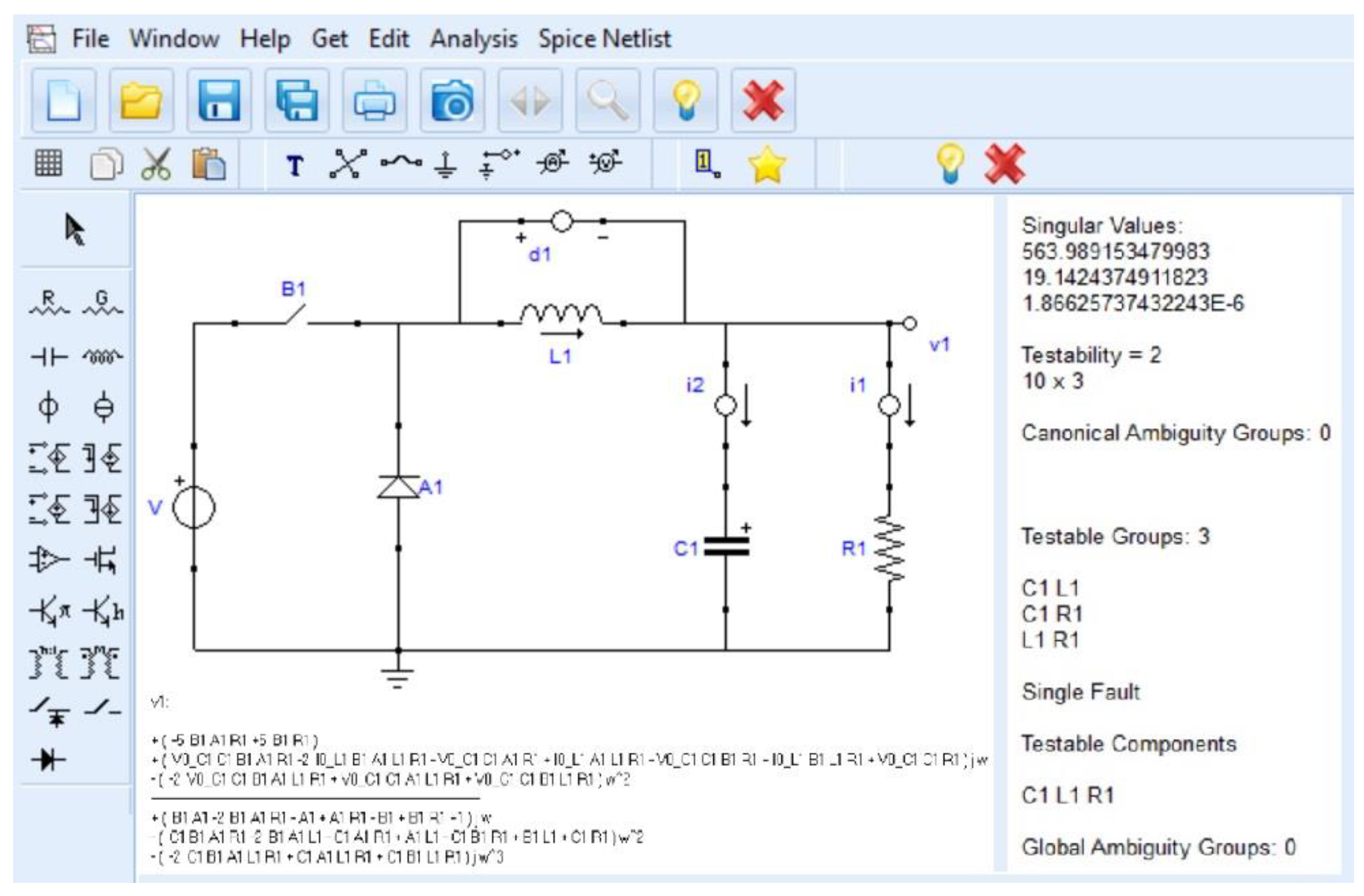
5.1.1. First Method: Testability Analysis of a Buck Converter in the Frequency Domain
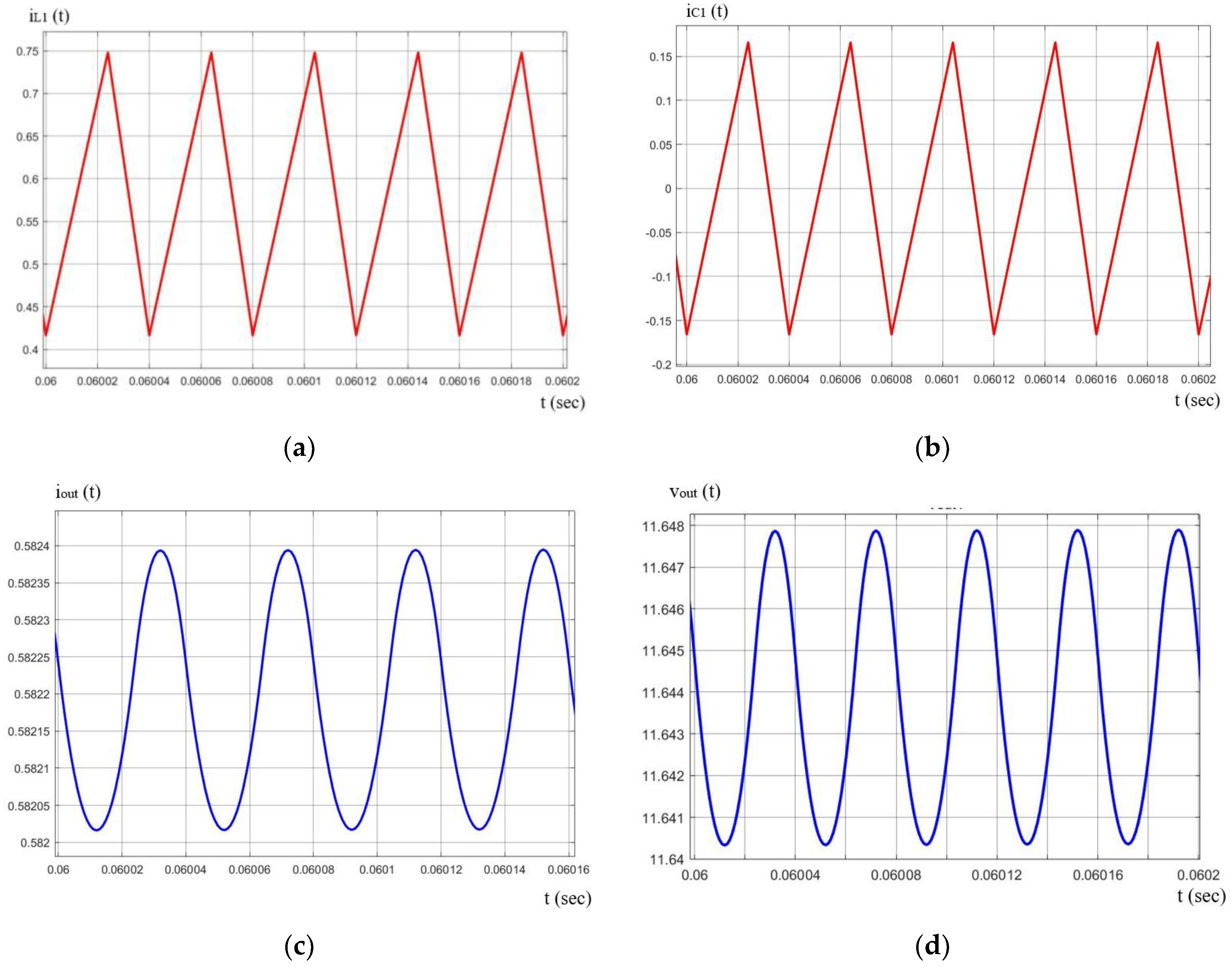
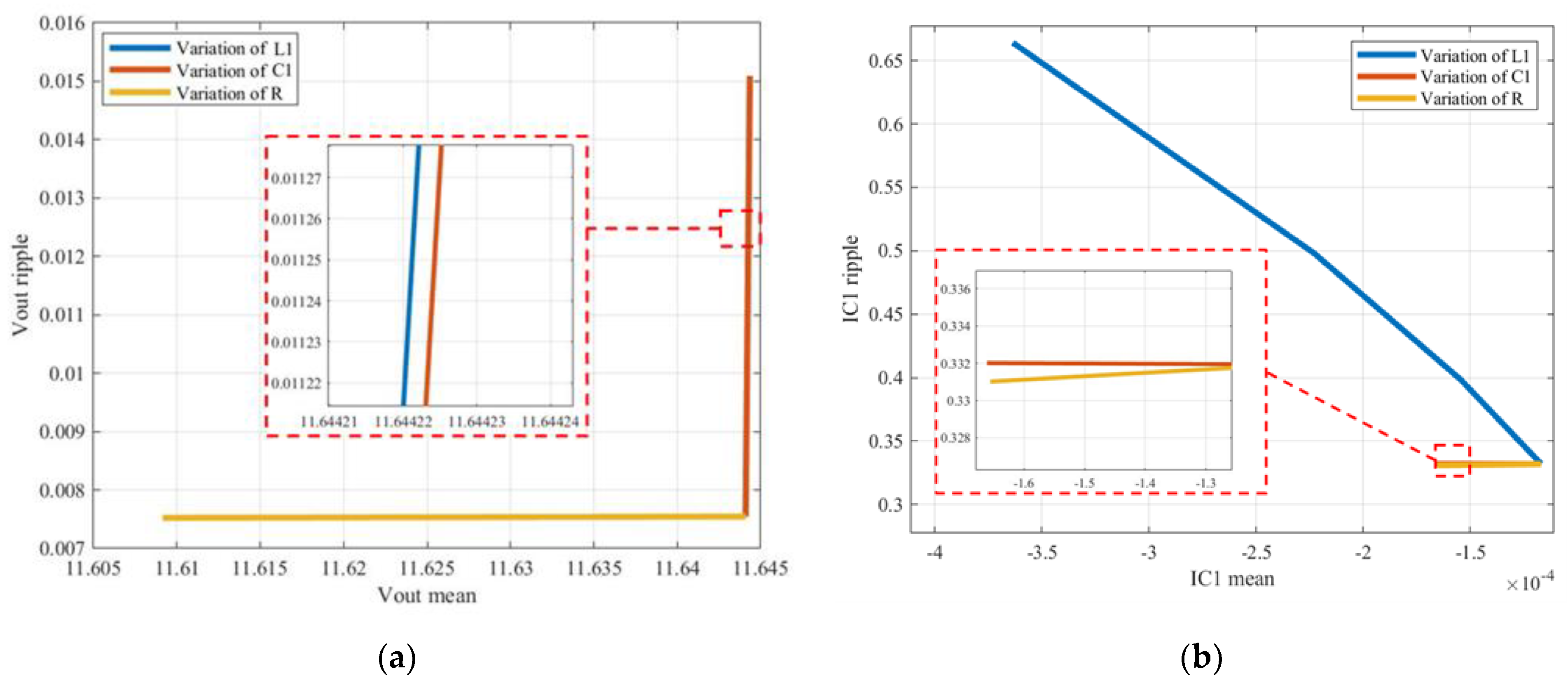
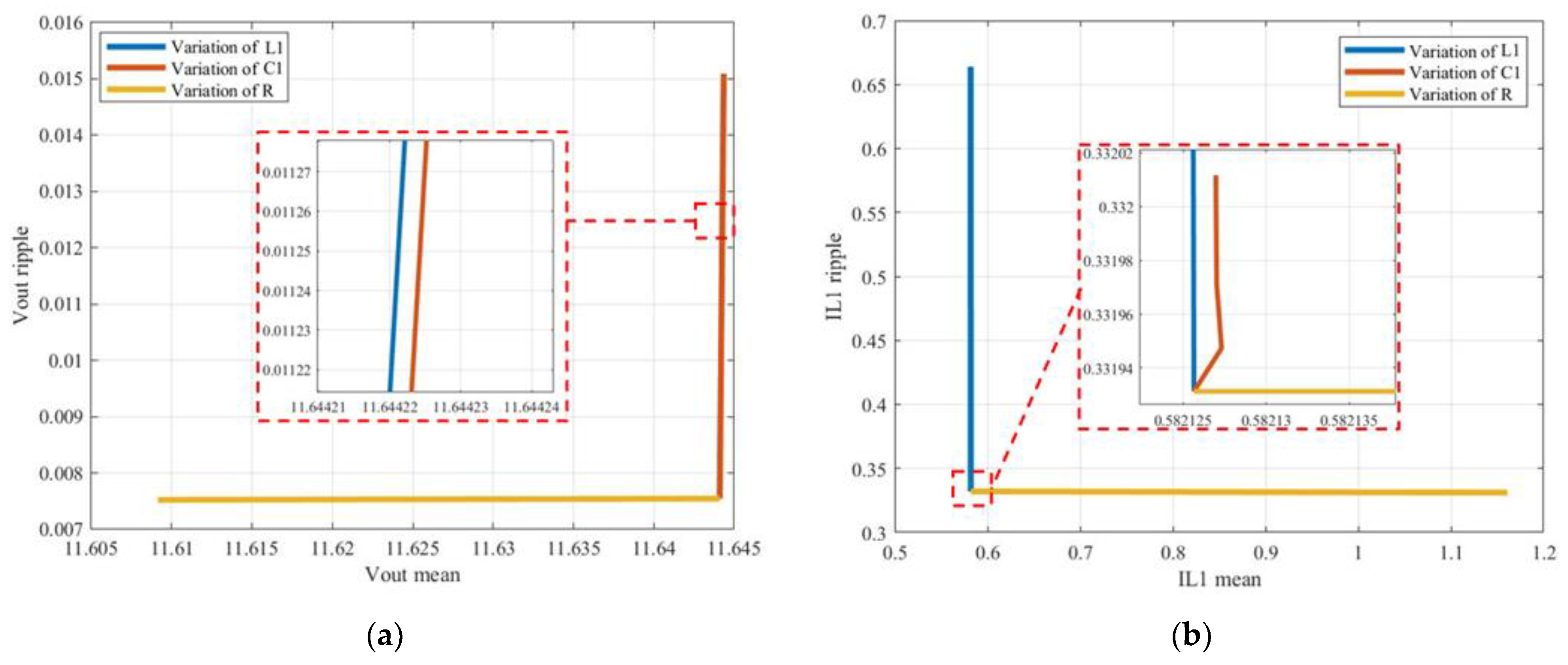
5.1.2. Second Method: Testability Analysis of a Buck Converter in the Time Domain
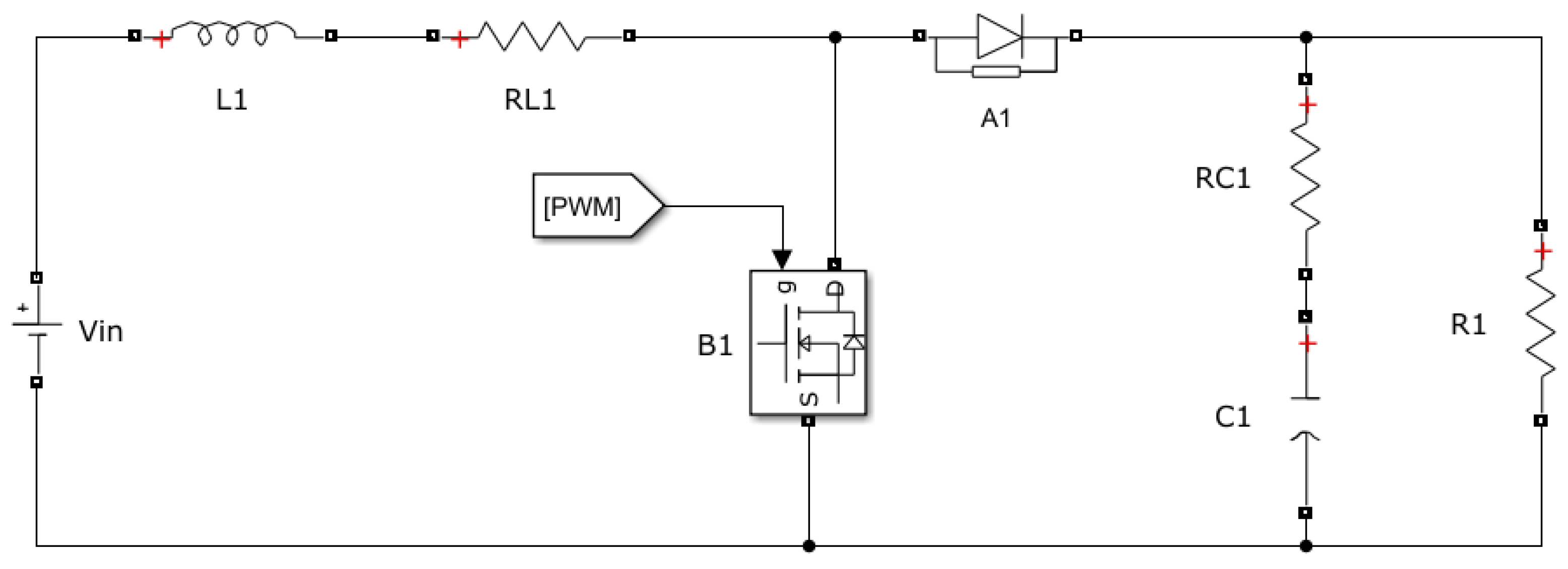
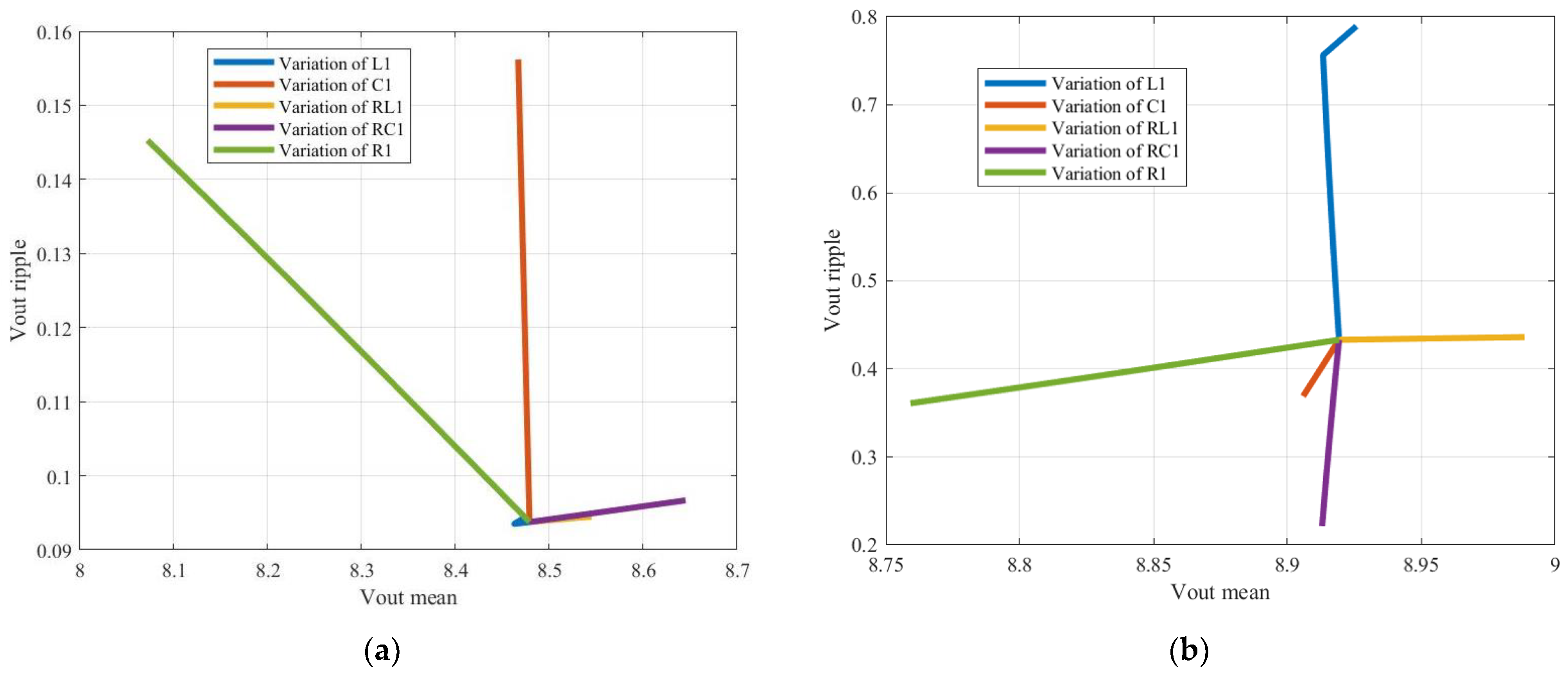
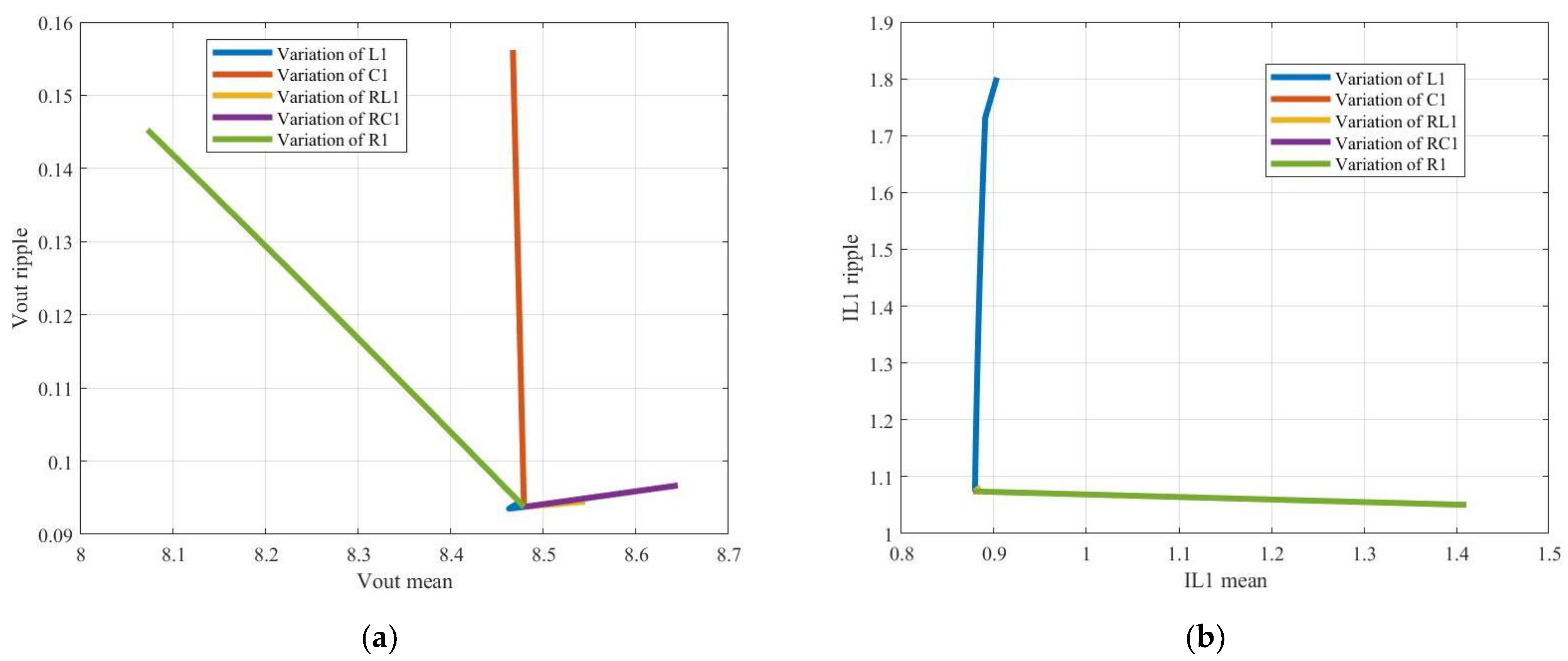
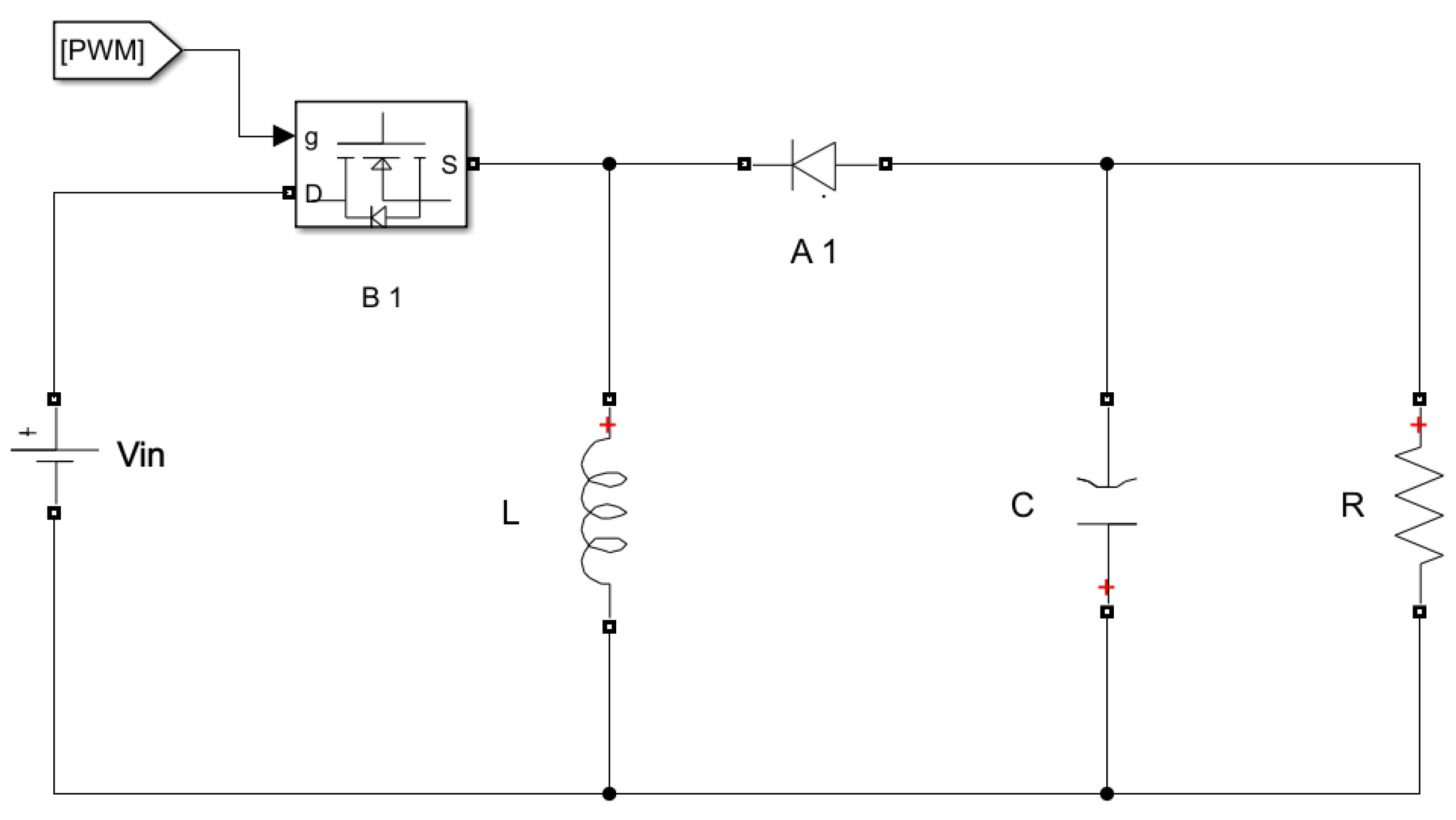
5.2. Testability Analysis of a Boost Converter with Parasitic Resistances
5.3. Testability Assessment of a Buck–Boost Converter
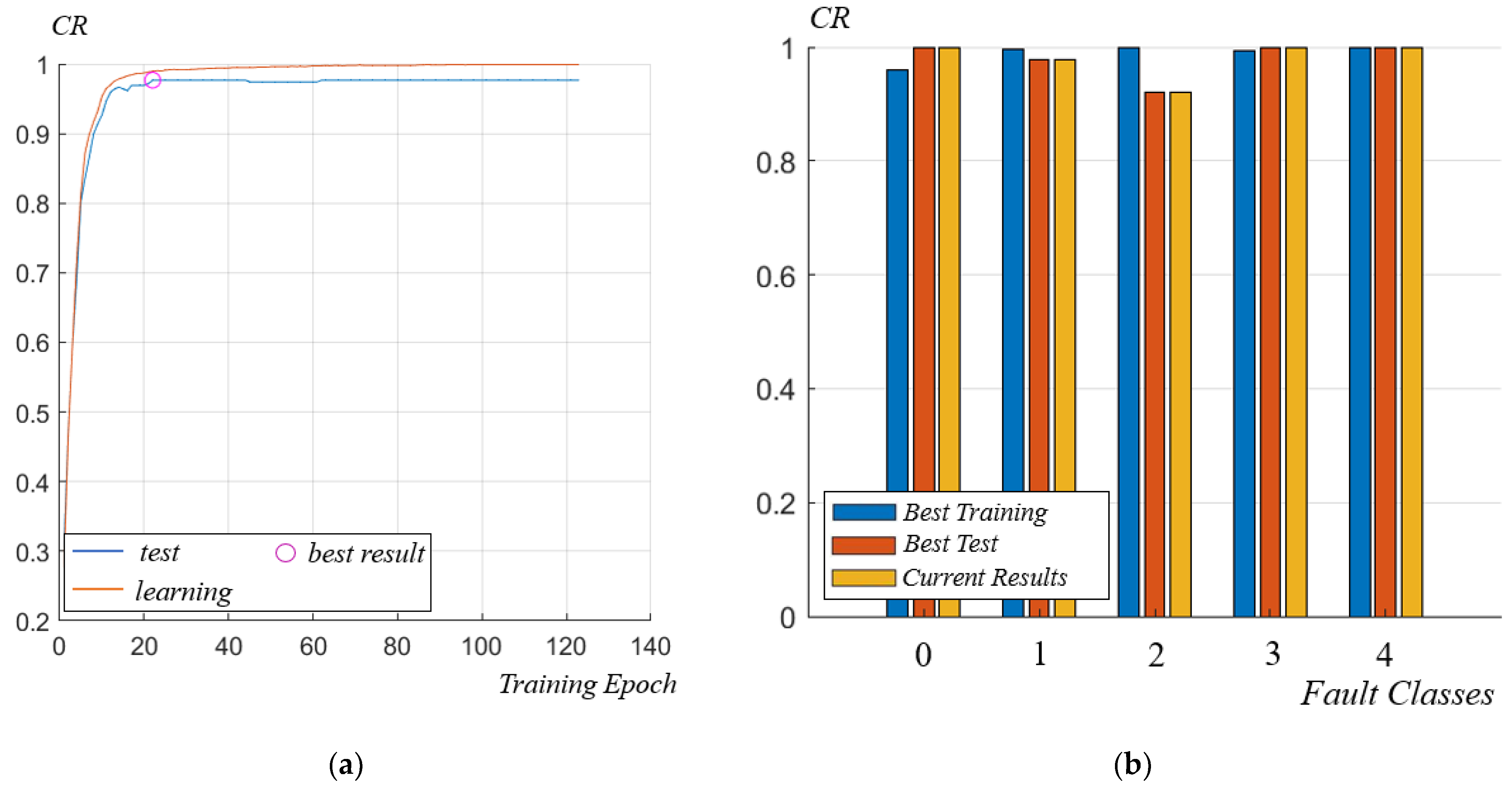
6. Classification Results
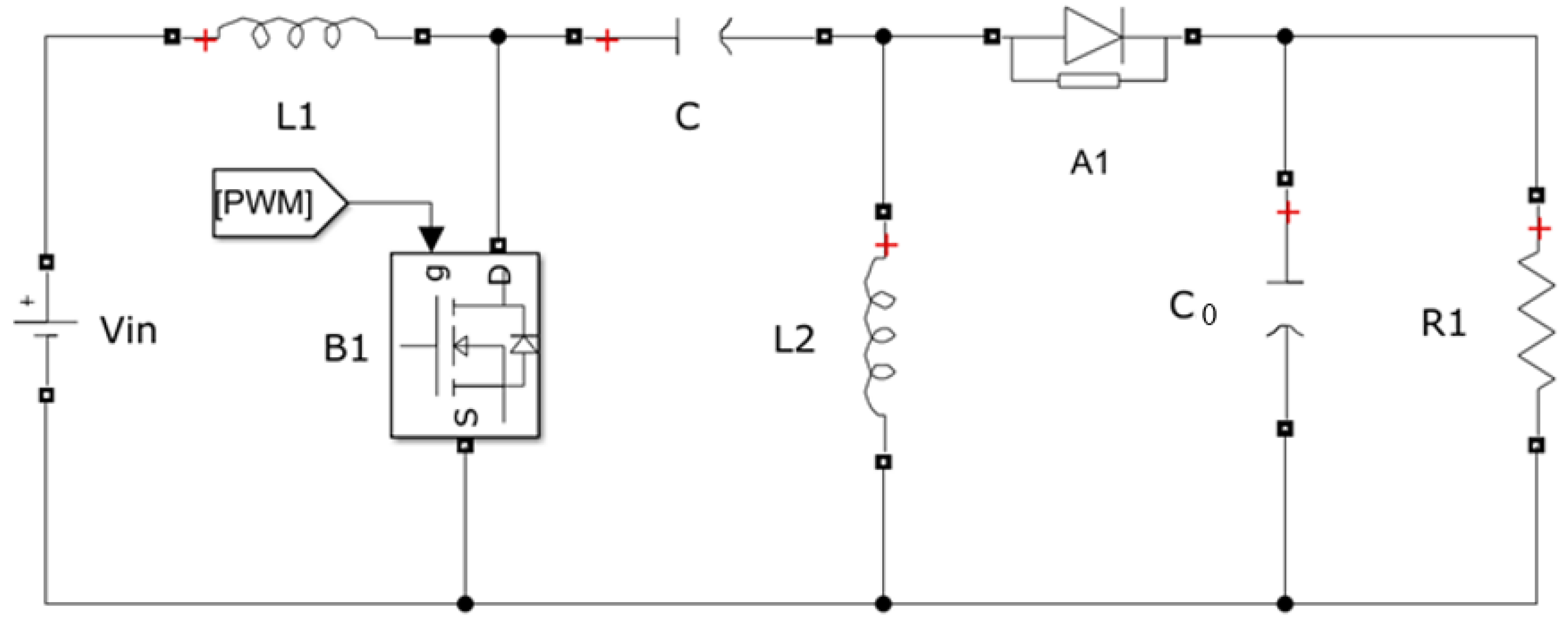
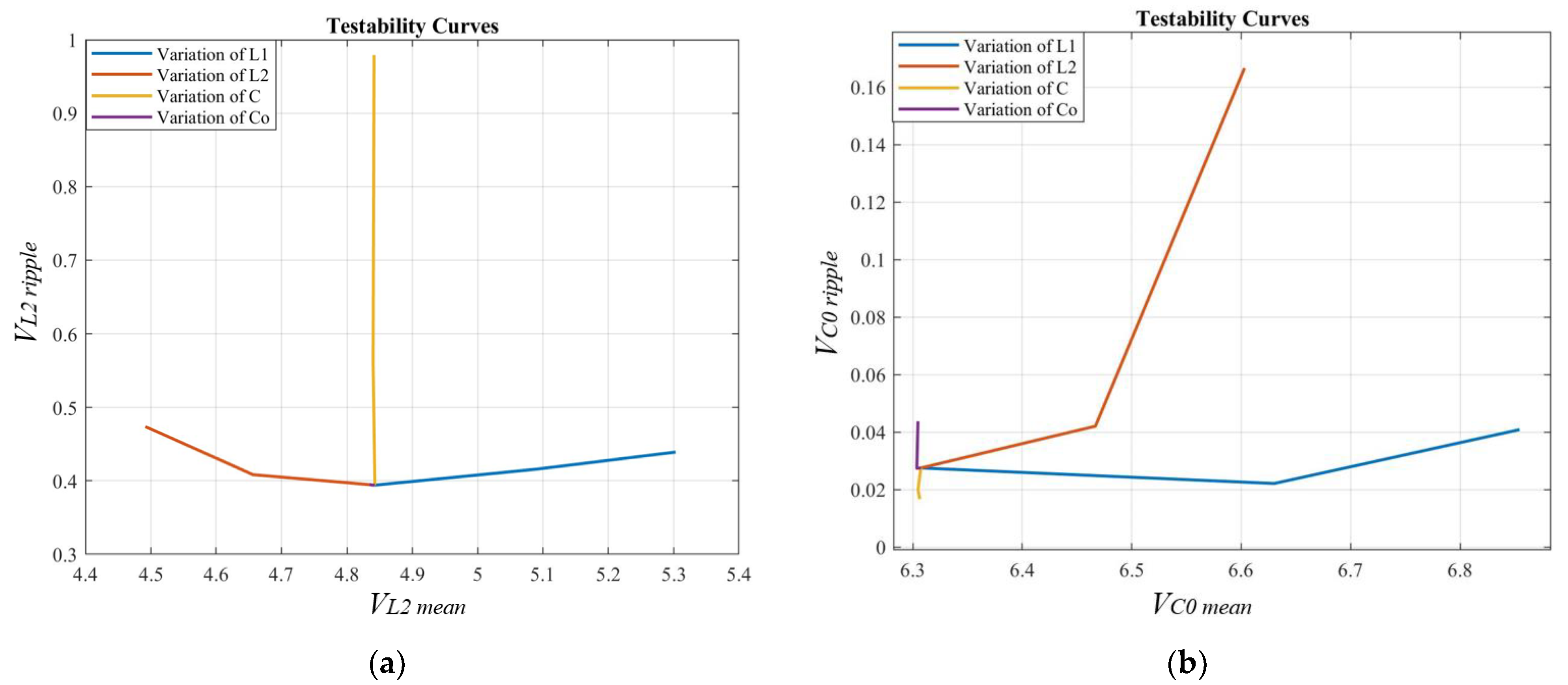
Fault Diagnosis in a SEPIC Converter
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Arya, S.R.; Singh, B. Neural network based conductance estimation control algorithm for shunt compensation. IEEE Trans. Ind. Inform. 2014, 10, 569–577. [Google Scholar] [CrossRef]
- Qasim, M.; Khadkikar, V. Application of artificial neural networks for shunt active power filter control. IEEE Trans. Ind. Inform. 2014, 10, 1765–1774. [Google Scholar] [CrossRef]
- Luchetta, A.; Manetti, S.; Piccirilli, M.C.; Reatti, A.; Corti, F.; Catelani, M.; Ciani, L.; Kazimierczuk, M.K. MLMVNNN for Parameter Fault Detection in PWM DC–DC Converters and Its Applications for Buck and Boost DC–DC Converters. IEEE Trans. Instrum. Meas. 2019, 68, 439–449. [Google Scholar] [CrossRef]
- Aizenberg, I.; Bindi, M.; Grasso, F.; Luchetta, A.; Manetti, S.; Piccirilli, M.C. Testability Analysis in Neural Network Based Fault Diagnosis of DC-DC Converter. In Proceedings of the 2019 IEEE 5th International forum on Research and Technology for Society and Industry (RTSI), Florence, Italy, 9–12 September 2019; pp. 265–268. [Google Scholar] [CrossRef]
- Fontana, G.; Luchetta, A.; Manetti, S.; Piccirilli, M.C. A Testability measure for DC-excited periodically switched networks with applications to DC-DC converters. IEEE Trans. Instrum. Meas. 2016, 65, 2321–2341. [Google Scholar] [CrossRef]
- Fedi, G.; Manetti, S.; Piccirilli, M.C.; Starzyk, J. Determination of an optimum set of testable components in the fault diagnosis of analog linear circuits. IEEE Trans. Circuits Syst.—Part I 1999, 46, 779–787. [Google Scholar] [CrossRef]
- Cannas, B.; Fanni, A.; Manetti, S.; Montisci, A.; Piccirilli, M.C. Neural network-based analog fault diagnosis using testability analysis. Neural Comput. Appl. 2004, 13, 288–298. [Google Scholar] [CrossRef]
- Grasso, F.; Luchetta, A.; Manetti, S.; Piccirilli, M.C. Symbolic techniques in neural network based fault diagnosis of analog circuits. In Proceedings of the 2010 XIth International Workshop on Symbolic and Numerical Methods, Modeling and Applications to Circuit Design (SM2ACD, Gammarth, Tunisia, 4–6 October 2010. [Google Scholar] [CrossRef]
- Spina, R.; Upadhyaya, S. Linear circuit fault diagnosis using neuromorphic analyzers. IEEE Trans. Circuits Syst.—Part II 1997, 44, 188–196. [Google Scholar] [CrossRef]
- Aminian, M.; Aminian, F. Neural network based analog-circuit fault diagnosis using wavelet transform as preprocessor. IEEE Trans. Circuits Syst.—Part II 2000, 47, 151–156. [Google Scholar] [CrossRef]
- Aminian, M.; Aminian, F.; Collins, H.W. Analog fault diagnosis of actual circuits using neural networks. IEEE Trans. Instrum. Meas. 2002, 51, 544–550. [Google Scholar] [CrossRef]
- Aminian, M.; Aminian, F. A modular fault-diagnosis system for analog electronic circuits using neural networks with wavelet transform as a processor. IEEE Trans. Instrum. Meas. 2007, 56, 1546–1554. [Google Scholar] [CrossRef]
- Berkowitz, R. Conditions for network-element-value solvability. IRE Trans. Circuit Theory 1962, 9, 24–29. [Google Scholar] [CrossRef]
- Dejka, W.J. A review of measures of testability for analog systems. In Proceedings of the International Automatic Testing Conference (AUTOTESTCON), Hyannis, MA, USA, 2–4 November 1977; pp. 279–284. [Google Scholar]
- Stenbakken, G.N.; Souders, T.M.; Stewart, G.W. Ambiguity groups and testability. IEEE Trans. Instrum. Meas. 1989, 38, 941–947. [Google Scholar] [CrossRef]
- Navid, N.; Willson, A. A theory and an algorithm for analog circuit fault diagnosis. IEEE Trans. Circuits Syst. 1979, 26, 440–457. [Google Scholar] [CrossRef]
- Huang, W.H.; Wey, C.L. Diagnosability analysis of analogue circuits. Int. J. Circuit Theory Appl. 1998, 26, 439–451. [Google Scholar] [CrossRef]
- Huang, Z.F.; Lin, C.; Liu, R. Node-fault diagnosis and a design of testability. In Proceedings of the 20th IEEE Conference on Decision and Control including the Symposium on Adaptive Processes, San Diego, CA, USA, 16–18 December 1981; pp. 1037–1042. [Google Scholar]
- Lin, C.; Huang, Z.F.; Liu, R. Topological conditions for singlebranch-fault. IEEE Trans. Autom. Control 1983, 28, 689–694. [Google Scholar] [CrossRef]
- Starzyk, J.A.; El-Gamal, M.A. Diagnosability of analog circuits, a graph theoretical approach. In Proceedings of the IEEE International Symposium on Circuits and Systems, Espoo, Finland, 7–9 June 1988; pp. 945–948. [Google Scholar]
- Priester, R.W.; Clary, J.B. New measures of testability and test complexity for linear analog failure analysis. IEEE Trans. Circuits Syst. 1981, C-30, 884–888. [Google Scholar]
- Stenbakken, G.N.; Souders, T.M. Test-point selection and testability measures via QR factorization of linear models. IEEE Trans. Instrum. Meas. 1987, IM-36, 406–410. [Google Scholar] [CrossRef]
- Cannas, B.; Fanni, A.; Montisci, A. Testability evaluation for analog linear circuits via transfer function analysis. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Kobe, Japan, 23–26 May 2005; pp. 992–995. [Google Scholar]
- Sen, N.; Saeks, R. Fault diagnosis for linear systems via multifrequency measurements. IEEE Trans. Circuits Syst. 1979, 26, 457–465. [Google Scholar] [CrossRef]
- Fontana, G.; Luchetta, A.; Manetti, S.; Piccirilli, M.C. An unconditionally sound algorithm for testability analysis in linear time-invariant electrical networks. Int. J. Circ. Theor. Appl. 2016, 44, 1308–1340. [Google Scholar] [CrossRef]
- Fontana, G.; Luchetta, A.; Manetti, S.; Piccirilli, M.C. A fast algorithm for testability analysis in large linear time invariant networks. IEEE Trans. Circ. Syst. I Regul. Pap. 2017, 64, 1564–1575. [Google Scholar] [CrossRef]
- Fontana, G.; Grasso, F.; Luchetta, A.; Manetti, S.; Piccirilli, M.C.; Reatti, A. Testability analysis based on complex-field fault modeling. In Proceedings of the 15th International Conference on Synthesis, Modeling, Analysis and Simulation Methods and Applica-tions to Circuit Design, SMACD’18, Prague, Czech Republic, 2–5 July 2018. [Google Scholar]
- Visvanathan, V.; Sangiovanni-Vincentelli, A. Diagnosability of nonlinear circuits and systems—Part I: The dc case. IEEE Trans. Circuits Syst. 1981, 28, 1093–1102. [Google Scholar] [CrossRef]
- Saeks, R.; Sangiovanni-Vincentelli, A.; Visvanathan, V. Diagnosability of nonlinear circuits and systems—Part II: Dynamical systems. IEEE Trans. Circuits Syst. 1981, 28, 1103–1108. [Google Scholar] [CrossRef]
- Fedi, G.; Giomi, R.; Manetti, S.; Piccirilli, M.C. A symbolic approach for testability evaluation in fault diagnosis of nonlinear analog circuits. In Proceedings of the 1998 IEEE International Symposium on Circuits and Systems, Monterey, CA, USA, 31 May–3 June 1998; Volume 6, pp. 9–12. [Google Scholar]
- Saini, D.K.; Ayachit, A.; Reatti, A.; Kazimierczuk, M.K. Analysis and Design of Choke Inductors for Switched-Mode Power Inverters. IEEE Trans. Ind. Electron. 2018, 65, 2234–2244. [Google Scholar] [CrossRef] [Green Version]
- Ayachit, A.; Reatti, A.; Kazmierczuk, M.K. Magnetising Inductance of Multiple-Output Flyback DC-DC Convertor for Discontinuous- Conduction Mode. IET Power Electron. 2017, 10, 451–461. [Google Scholar] [CrossRef] [Green Version]
- Luchetta, A.; Manetti, S.; Piccirilli, M.C.; Reatti, A.; Kazimierczuk, M.K. Comparison of DCM operated PWM DC-DC converter modelling methods including the effects of parasitic components on duty ratio constraint. In Proceedings of the IEEE 15th International Conference on Environment and Electrical Engineering, Rome, Italy, 10–13 June 2015; pp. 766–771. [Google Scholar]
- Ayachit, A.; Reatti, A.; Kazimierczuk, M.K. Small-Signal Modeling of PWM Dual-SEPIC DC-DC Converter by Circuit Averaging Technique. In Proceedings of the 42nd Annual Conference of IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 3606–3611. [Google Scholar]
- Reatti, A.; Piccirilli, M.C.; Kazimierczuk, M.K.; Grasso, F.; Ayachit, A.; Albertoni, L.; Matteucci, J. Analysis and design of full-bridge Class-DE inverter at fixed duty cycle. In Proceedings of the 42nd Annual Conference of IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 5609–5614. [Google Scholar]
- Catelani, M.; Ciani, L.; Reatti, A. Critical components test and reliability issues for Photovoltaic Inverter. In Proceeding of the 20th IMEKO TC-42014—International Workshop on ADC and DAC Modelling and Testing, Benevento, Italy, 17 September 2014; pp. 592–596. [Google Scholar]
- Fontana, G.; Grasso, F.; Luchetta, A.; Manetti, S.; Piccirilli, M.C.; Reatti, A. A new simulation program for analog circuits using symbolic analysis techniques. In Proceedings of the 2015 International Conference on Synthesis, Modeling, Analysis and Simulation Methods and Applica-tions to Circuit Design (SMACD), Istanbul, Turkey, 7–9 September 2015; pp. 1–4. [Google Scholar]
- Grasso, F.; Manetti, S.; Piccirilli, M.C.; Reatti, A. A Laplace transform approach to the simulation of DC-DC converters. Int. J. Numer. Model. 2019, 32, e2618. [Google Scholar] [CrossRef]
- Grasso, F.; Luchetta, A.; Manetti, S.; Piccirilli, M.C.; Reatti, A. SapWin4.0—A new simulation program for electrical engineering education using symbolic analysis. Comput. Appl. Eng. Educ. 2016, 24, 44–57. [Google Scholar] [CrossRef]
- Grasso, F.; Luchetta, A.; Manetti, S.; Piccirilli, M.C. Symbolic Techniques in DC-DC Converter Simulation. In Proceedings of the 2019 IEEE 5th International forum on Research and Technology for Society and Industry (RTSI), Florence, Italy, 9–12 September 2019. [Google Scholar]
- Piccirilli, M.C.; Grasso, F.; Luchetta, A.; Manetti, S.; Reatti, A. Simulation of Pulse Width Modulation DC-DC Converters Through Symbolic Analysis Techniques. Adv. Sci. Technol. Eng. Syst. J. 2021, 6, 275–282, ISSN:2415-6698. [Google Scholar] [CrossRef]
- Sun, J.; Mitchell, D.M.; Greuel, M.F.; Krein, P.T.; Bass, R.M. Averaged modeling of PWM converters operating in discontinuous conduction mode. IEEE Trans. Power Electron. 2001, 16, 482–492. [Google Scholar]
- Luchetta, A.; Manetti, S.; Piccirilli, M.C.; Reatti, A.; Kazimierczuk, M.K. Effects of parasitic components on diode duty cycle and small-signal model of PWM DC-DC buck converter in DCM. In Proceedings of the IEEE 15th International Conference on Environment and Electrical Engineering, Rome, Italy, 10–13 June 2015; pp. 772–777. [Google Scholar]
- Luchetta, A.; Manetti, S.; Piccirilli, M.C.; Reatti, A.; Kazimierczuk, M.K. Derivation of network functions for PWM DC-DC buck converter in DCM including effects of parasitic components on diode duty-cycle. In Proceedings of the IEEE 15th International Conference on Environment and Electrical Engineering, Rome, Italy, 10–13 June 2015; pp. 778–783. [Google Scholar]
- Davoudi, A.; Jatskevich, J.; Chapman, P.L. Averaged modelling of switched-inductor cells considering conduction losses in discontinuous mode. IET Electr. Power Appl. 2007, 1, 402–406. [Google Scholar] [CrossRef]
- Sun, J. Unified averaged switch models for stability analysis of large distributed power systems. In Proceedings of the APEC 2000, Fifteenth Annual IEEE Applied Power Electronics Conference and Exposition, New Orleans, LA, USA, 6–10 February 2000; pp. 249–255. [Google Scholar]
- Saini, D.; Reatti, A.; Kazimierczuk, M.K. Average current-mode control of buck DC-DC converter with reduced control voltage ripple. In Proceedings of the 42nd Annual Conference of IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 3270–3275. [Google Scholar]
- Aizenberg, I. Complex-Valued Neural Networks with Multi-Valued Neurons; Springer: New York, NY, USA, 2011. [Google Scholar]
- Aizenberg, I.; Luchetta, A.; Manetti, S. A modified learning algorithm for the multilayer neural network with multi-valued neurons based on the complex QR decomposition. Soft Comput. 2012, 16, 563–575. [Google Scholar] [CrossRef]
- Aizenberg, I. MLMVN With Soft Margins Learning. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1632–1644. [Google Scholar] [CrossRef]
- Kazimierczuk, M.K. Pulse-Width Modulated DC-DC Power Converters, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Babaei, E.; Seyed Mahmoodieh, M.E. Calculation of Output Voltage Ripple and Design Considerations of SEPIC Converter. IEEE Trans. Ind. Electron. 2014, 61, 1213–1222. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Points | Switching Period | B1 | A1 | TGs | Testability |
|---|---|---|---|---|---|
| , | On | 1 | 0 | C1, L1 C1, R1 L1, R1 | 2 |
| Off | 0 | 1 | C1, L1 C1, R1 L1, R1 | 2 |
| Test Points | Switching Period | B1 | A1 | TGs | Testability |
|---|---|---|---|---|---|
| On | 1 | 0 | C1, L1, R1 | 3 | |
| Off | 0 | 1 | C1, L1 C1, R1 L1, R1 | 2 |
| L | C | R | f |
|---|---|---|---|
| 750 μH | 2 mF | 1 Ω | 10 kHz |
| Fault Class | Description |
|---|---|
| 0 | All passive components are in the nominal conditions |
| 1 | L1 is in malfunction condition |
| 2 | L2 is in malfunction condition |
| 3 | C is in malfunction condition |
| 4 | C0 is in malfunction condition |
| Fault Class | Output Combination |
|---|---|
| 0 | 0 0 0 0 |
| 1 | 0 0 0 1 |
| 2 | 0 0 1 0 |
| 3 | 0 1 0 0 |
| 4 | 1 0 0 0 |
| Learning Phase | Test Phase | |
|---|---|---|
| Global classification rate | 97.75% | 99% |
| Class 0 | 95.99% | 100% |
| Class 1 | 99.68% | 97.73% |
| Class 2 | 100% | 91.95% |
| Class 3 | 99.38% | 100% |
| Class 4 | 100% | 100% |
| Classifier | Classification Rate (%) |
|---|---|
| MLMVN-based classifier | 97.75% |
| Gaussian naïve Bayes | 89% |
| Linear support vector machine | 92% |
| Quadratic support vector machine | 94.5% |
| 1-nearest neighbor | 90.5% |
| 100-nearest neighbor | 92% |
| Decision tree | 87.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bindi, M.; Piccirilli, M.C.; Luchetta, A.; Grasso, F.; Manetti, S. Testability Evaluation in Time-Variant Circuits: A New Graphical Method. Electronics 2022, 11, 1589. https://doi.org/10.3390/electronics11101589
Bindi M, Piccirilli MC, Luchetta A, Grasso F, Manetti S. Testability Evaluation in Time-Variant Circuits: A New Graphical Method. Electronics. 2022; 11(10):1589. https://doi.org/10.3390/electronics11101589
Chicago/Turabian StyleBindi, Marco, Maria Cristina Piccirilli, Antonio Luchetta, Francesco Grasso, and Stefano Manetti. 2022. "Testability Evaluation in Time-Variant Circuits: A New Graphical Method" Electronics 11, no. 10: 1589. https://doi.org/10.3390/electronics11101589
APA StyleBindi, M., Piccirilli, M. C., Luchetta, A., Grasso, F., & Manetti, S. (2022). Testability Evaluation in Time-Variant Circuits: A New Graphical Method. Electronics, 11(10), 1589. https://doi.org/10.3390/electronics11101589