



Artificial Neural Network-Based Abnormal Gait Pattern Classification Using Smart Shoes with a Gyro Sensor



Abstract
:1. Introduction
2. Implementation and Experimental Evaluation of a Gait-Pattern Monitoring System Using Smart Shoes
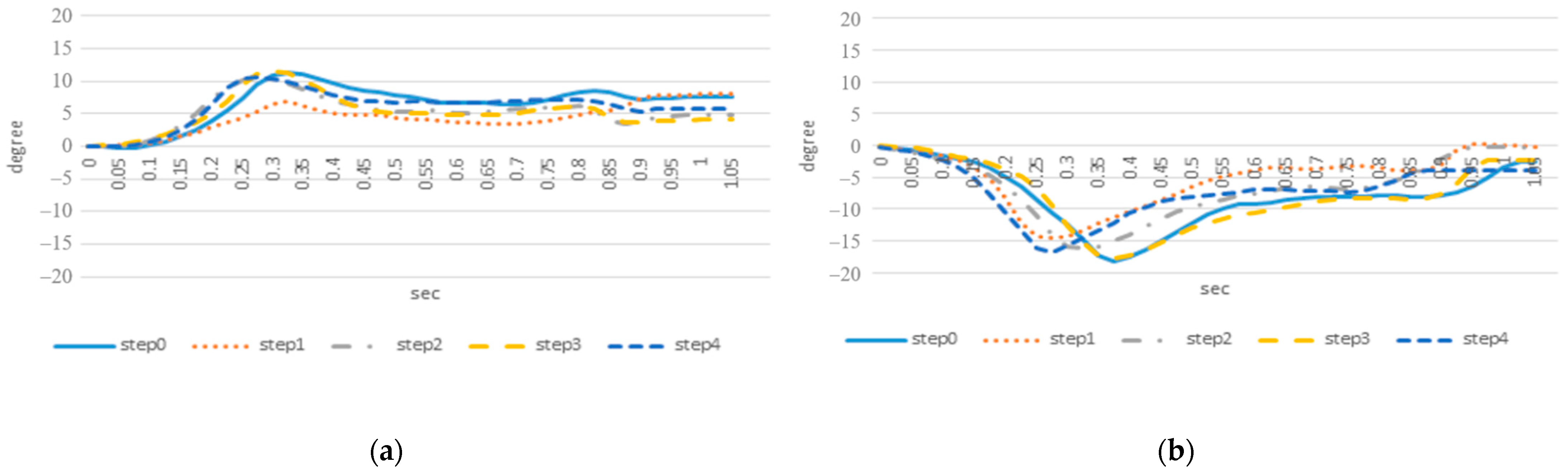
2.1. Characteristics of Toe-Out Angle according to Gait Pattern
2.2. Implementation of Smart Shoes to Measure Toe-Out Angle
2.3. Experimental Evaluation for Measurement of Toe-Out Angle
3. Implementation and Experimental Evaluation of the ANN-Based Gait-Pattern Classification Model
3.1. Implementation of Classification Model
3.2. Experimental Evaluation for Gait Pattern Classification
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hnatiuc, M.; Geman, O.; Avram, A.G.; Gupta, D.; Shankar, K. Human signature identification using IoT technology and gait recognition. Electronics 2021, 10, 852. [Google Scholar] [CrossRef]
- Jarchi, D.; Pope, J.; Lee, T.K.; Tamjidi, L.; Mirzaei, A.; Sanei, S. A review on accelerometry-based gait analysis and emerging clinical applications. IEEE Rev. Biomed. Eng. 2018, 11, 177–194. [Google Scholar] [CrossRef] [PubMed]
- Uddin, M.Z.; Hassan, M.M. Activity recognition for cognitive assistance using body sensors data and deep convolutional neural network. IEEE Sens. J. 2018, 19, 8413–8419. [Google Scholar] [CrossRef]
- Cola, G.; Avvenuti, M.; Vecchio, A.; Yang, G.Z.; Lo, B. An on-node processing approach for anomaly detection in gait. IEEE Sens. J. 2015, 15, 6640–6649. [Google Scholar] [CrossRef]
- Karatsidis, A.; Richards, R.E.; Konrath, J.M.; Van Den Noort, J.C.; Schepers, H.M.; Bellusci, G.; Veltink, P.H. Validation of wearable visual feedback for retraining foot progression angle using inertial sensors and an augmented reality headset. J. Neuroeng. Rehabil. 2018, 15, 78. [Google Scholar] [CrossRef] [PubMed]
- Sigcha, L.; Borzì, L.; Pavón, I.; Costa, N.; Costa, S.; Arezes, P.; Lopez, J.M.; De Arcas, G. Improvement of performance in freezing of gait detection in Parkinson’s disease using transformer networks and a single waist-worn triaxial accelerometer. Eng. Appl. Artif. Intell. 2022, 116, 105482. [Google Scholar] [CrossRef]
- Guo, Y.; Wu, D.; Liu, G.; Zhao, G.; Huang, B.; Wang, L. A low-cost body inertial-sensing network for practical gait discrimination of hemiplegia patients. Telemed. e-Health 2012, 18, 748–754. [Google Scholar] [CrossRef] [PubMed]
- Tian, J. Adversarial vulnerability of deep neural network-based gait event detection: A comparative study using accelerometer-based data. Biomed. Signal Process. Control 2022, 73, 103429. [Google Scholar] [CrossRef]
- Khandelwal, S.; Wickström, N. Evaluation of the performance of accelerometer-based gait event detection algorithms in different real-world scenarios using the MAREA gait database. Gait Posture 2017, 51, 84–90. [Google Scholar] [CrossRef] [PubMed]
- Daunoraviciene, K.; Ziziene, J.; Pauk, J.; Juskeniene, G.; Raistenskis, J. EMG based analysis of gait symmetry in healthy children. Sensors 2021, 21, 5983. [Google Scholar] [CrossRef] [PubMed]
- Sawacha, Z.; Spolaor, F.; Piątkowska, W.J.; Cibin, F.; Ciniglio, A.; Guiotto, A.; Ricca, M.; Polli, R.; Murgia, A. Feasibility and reliability assessment of video-based motion analysis and surface electromyography in children with fragile X during gait. Sensors 2021, 21, 4746. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Zhao, G.; Liu, Q.; Mei, Z.; Ivanov, K.; Wang, L. Balance and knee extensibility evaluation of hemiplegic gait using an inertial body sensor network. Biomed. Eng. Online 2013, 12, 83. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Almuteb, I.; Hua, R.; Wang, Y. Smart insoles review over the last two decade: Applications, potentials, and future. Smart Health 2022, 25, 100301. [Google Scholar] [CrossRef]
- Chatzaki, C.; Skaramagkas, V.; Tachos, N.; Christodoulakis, G.; Maniadi, E.; Kefalopoulou, Z.; Fotiadis, D.; Tsiknakis, M. The smart-insole dataset: Gait analysis using wearable sensors with a focus on elderly and Parkinson’s patients. Sensors 2021, 21, 2821. [Google Scholar] [CrossRef] [PubMed]
- Kong, K.; Tomizuka, M. A gait monitoring system based on air pressure sensors embedded in a shoe. IEEE/ASME Trans. Mechatron. 2009, 14, 358–370. [Google Scholar] [CrossRef]
- Xu, W.; Huang, M.C.; Amini, N.; Liu, J.J.; He, L.; Sarrafzadeh, M. Smart insole: A wearable system for gait analysis. In Proceedings of the 5th International Conference on Pervasive Technologies Related to Assistive Environments, Arlington, TX, USA, 6–8 June 2012. [Google Scholar]
- Pacini Panebianco, G.; Ferrazzoli, D.; Frazzitta, G.; Fonsato, M.; Bisi, M.C.; Fantozzi, S.; Stagni, R. A Statistical Approach for the Assessment of Muscle Activation Patterns during Gait in Parkinson’s Disease. Electronics 2020, 9, 1641. [Google Scholar] [CrossRef]
- Veer, K.; Pahuja, S.K. Gender based assessment of gait rhythms during dual-task in Parkinson’s disease and its early detection. Biomed. Signal Process. Control 2022, 72, 103346. [Google Scholar]
- Rosenbaum, D. Foot loading patterns can be changed by deliberately walking with in-toeing or out-toeing gait modifications. Gait Posture 2013, 38, 1067–1069. [Google Scholar] [CrossRef] [PubMed]
- Prabhu, S.B.; Sophia, S.; Sowmiya, K.; Vinesha, P.; Thamaraiselvi, P. Gait based prediction and diagnosis of abnormal wall pattern and rendering effective treatment for patients with musculoskeletal problems. Eur. J. Mol. Clin. Med. 2021, 7, 1943–1957. [Google Scholar]
- Ringdahl, E.N.; Pandit, S. Treatment of knee osteoarthritis. Am. Fam. Physician 2011, 83, 1287–1292. [Google Scholar] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step of Left Foot | Step of Right Foot | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 1 | 2 | 3 | 4 | 5 | 6 | |
| in-toeing | 0.94 | 5.55 | 2.73 | 0.11 | 2.49 | 2.14 | 0.13 | 0.48 | 0.59 | 14.01 | 11.33 | 29.21 |
| normal | 0.03 | 0.44 | 0.02 | 0.47 | 0.68 | 0.75 | 97.31 | 98.58 | 99.97 | 99.17 | 99.13 | 97.03 |
| out-toeing | 99.39 | 83.81 | 99.15 | 99.67 | 89.72 | 92.98 | 6.84 | 1.31 | 0.03 | 0.02 | 0.03 | 0.03 |
| Step of Left Foot | Step of Right Foot | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 1 | 2 | 3 | 4 | 5 | 6 | |
| in-toeing | 96.47 | 99.55 | 88.62 | 91.84 | 93.29 | 94.39 | 0.10 | 1.26 | 3.28 | 0.08 | 2.04 | 0.03 |
| normal | 0.01 | 0.36 | 1.06 | 0.02 | 0.02 | 0.01 | 95.95 | 83.78 | 92.47 | 95.16 | 94.25 | 92.47 |
| out-toeing | 0.45 | 0.01 | 0.07 | 1.61 | 1.01 | 1.11 | 11.83 | 4.64 | 3.28 | 15.71 | 1.09 | 3.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, K.; Lee, K.-C. Artificial Neural Network-Based Abnormal Gait Pattern Classification Using Smart Shoes with a Gyro Sensor. Electronics 2022, 11, 3614. https://doi.org/10.3390/electronics11213614
Jeong K, Lee K-C. Artificial Neural Network-Based Abnormal Gait Pattern Classification Using Smart Shoes with a Gyro Sensor. Electronics. 2022; 11(21):3614. https://doi.org/10.3390/electronics11213614
Chicago/Turabian StyleJeong, Kimin, and Kyung-Chang Lee. 2022. "Artificial Neural Network-Based Abnormal Gait Pattern Classification Using Smart Shoes with a Gyro Sensor" Electronics 11, no. 21: 3614. https://doi.org/10.3390/electronics11213614
APA StyleJeong, K., & Lee, K. -C. (2022). Artificial Neural Network-Based Abnormal Gait Pattern Classification Using Smart Shoes with a Gyro Sensor. Electronics, 11(21), 3614. https://doi.org/10.3390/electronics11213614