
Extended Simplified Electro-Mechanical Model of a Variable-Speed Wind Turbine for Grid Integration Studies: Emulation and Validation on a Microgrid Lab




Abstract
:1. Introduction
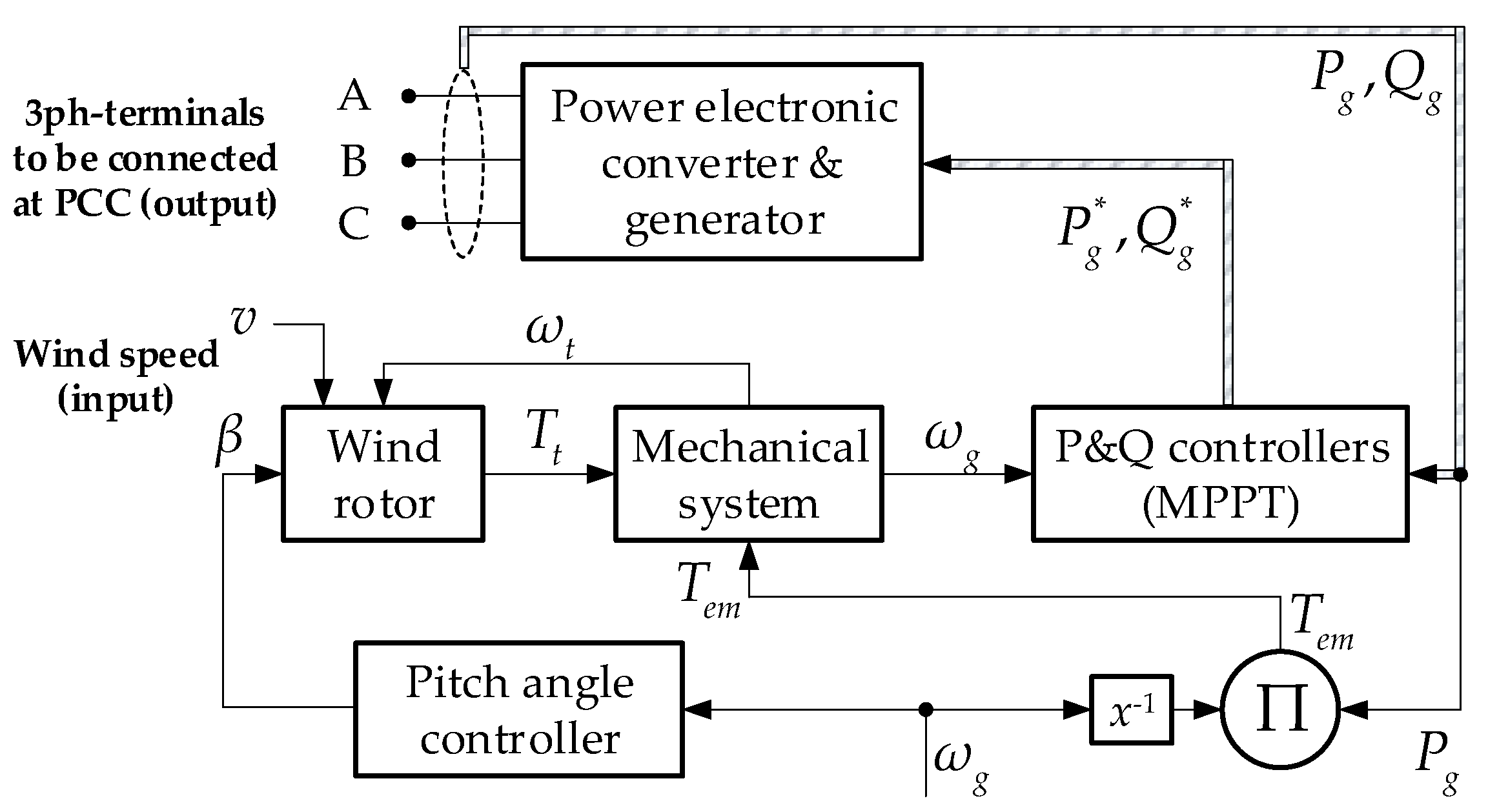
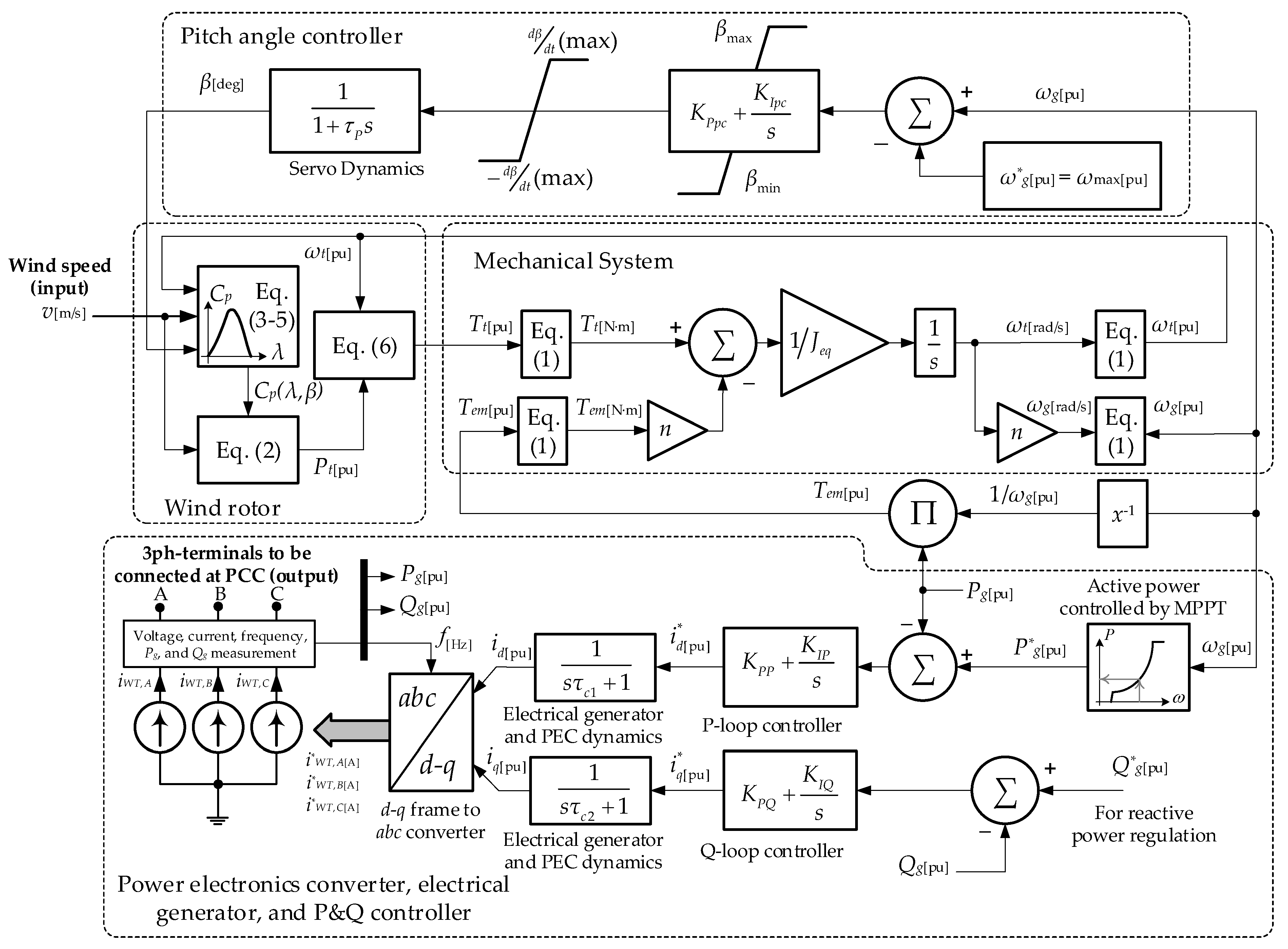
2. Modelling of Variable-Speed Wind Turbine
3. Results and Discussion
3.1. Validation of the Model
3.1.1. Validation of the Simplified Electro-Mechanical VSWT-Model
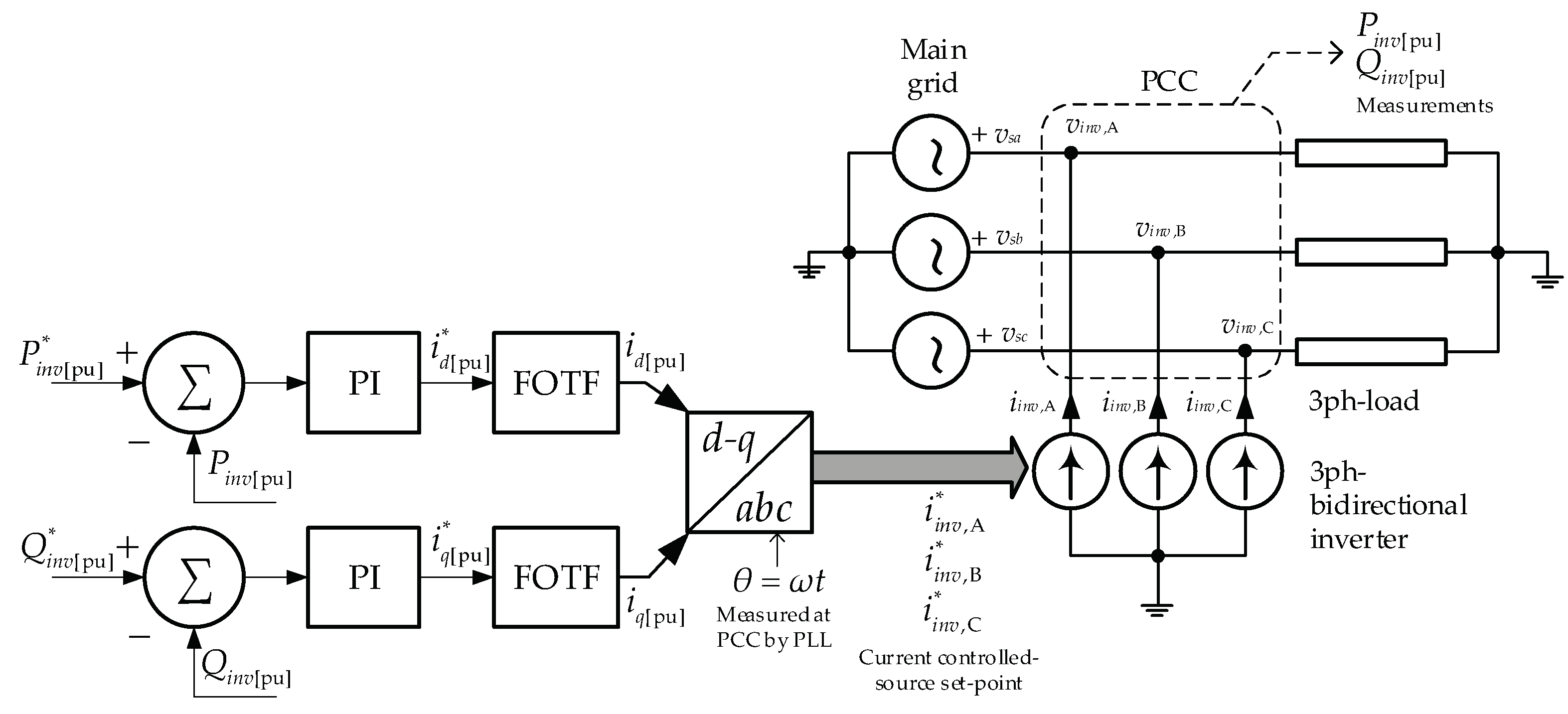
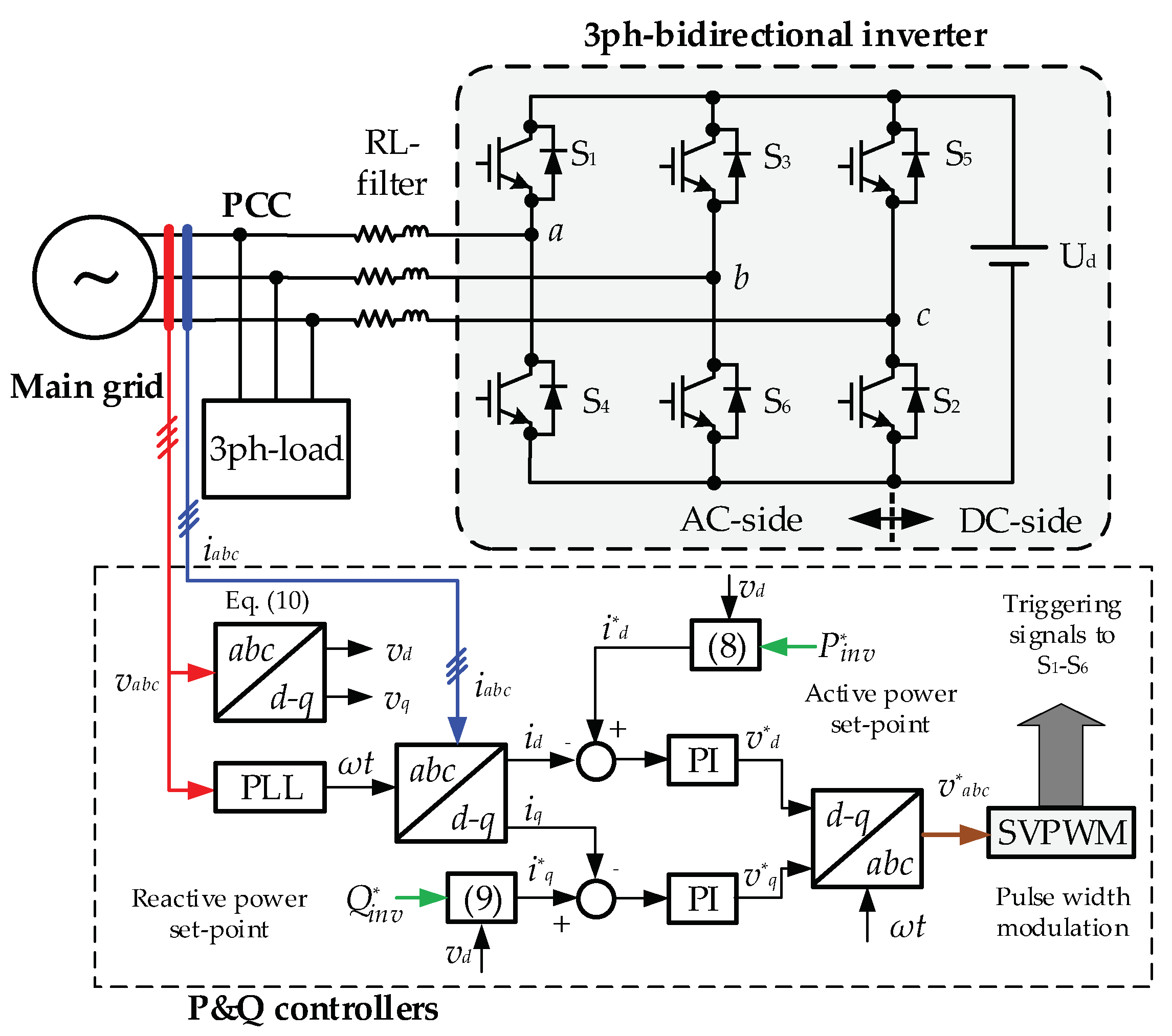
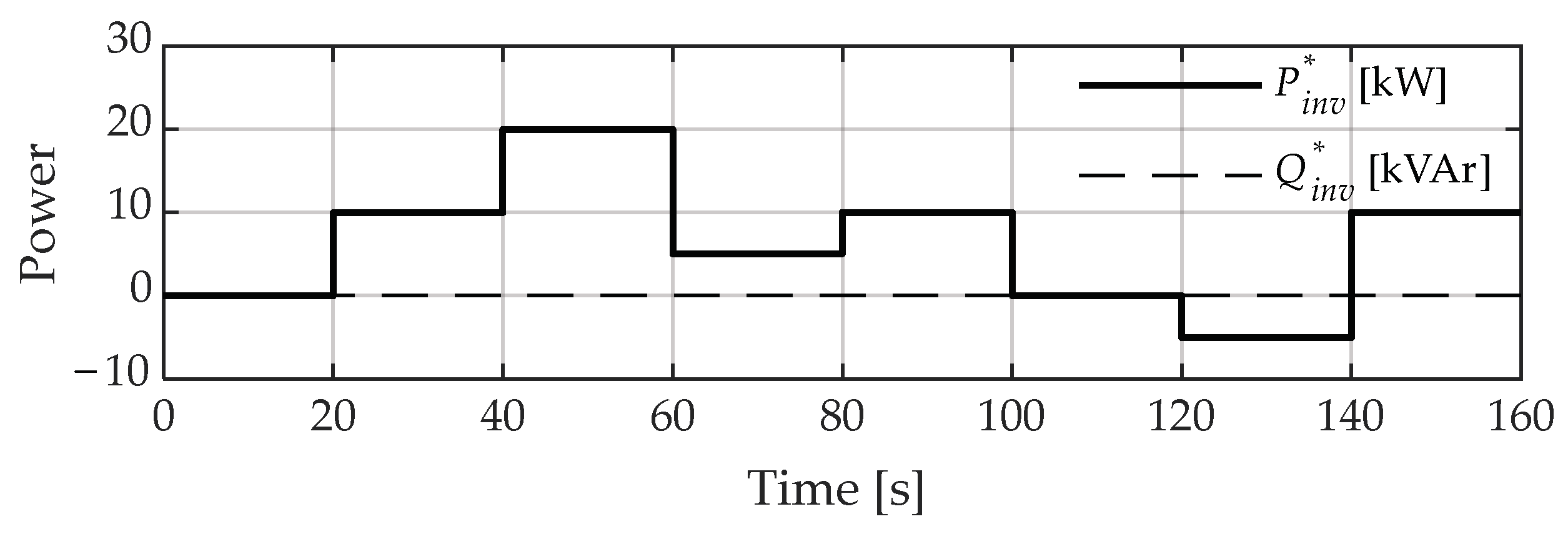
3.1.2. Validation of the Simplified Representation of the PEC
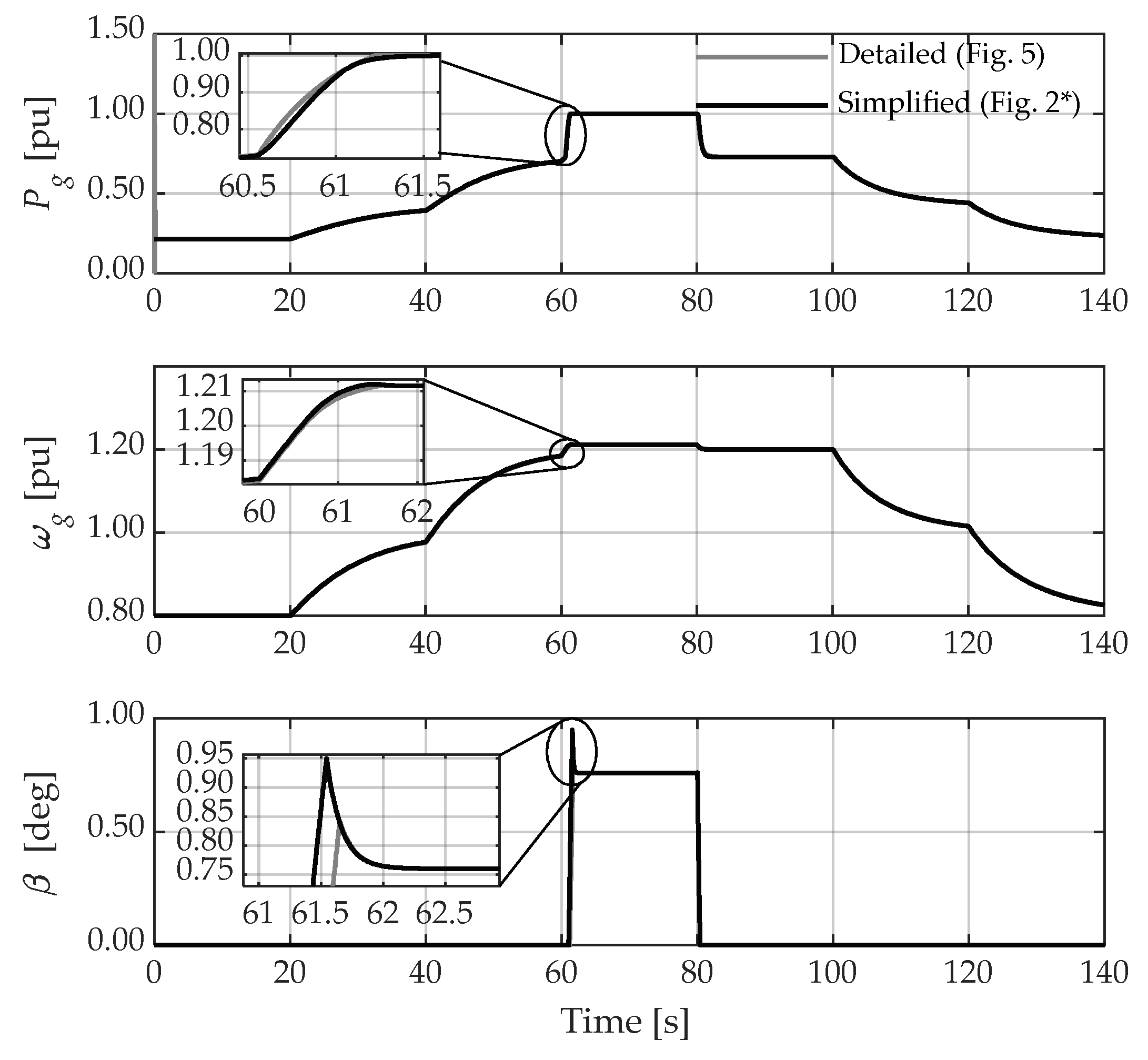
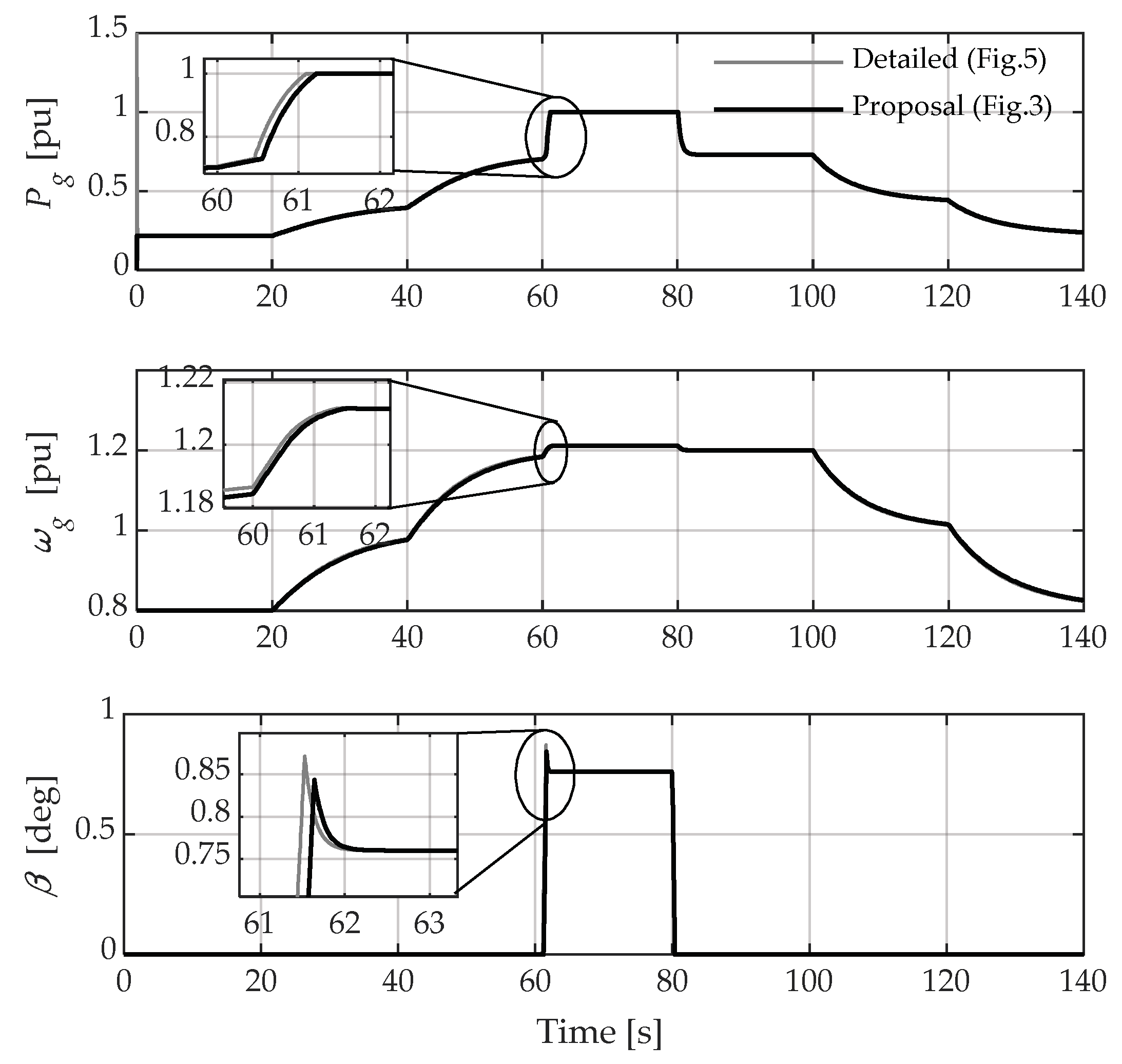
3.1.3. Validation of the Extended Simplified VSWT Model in Simulation
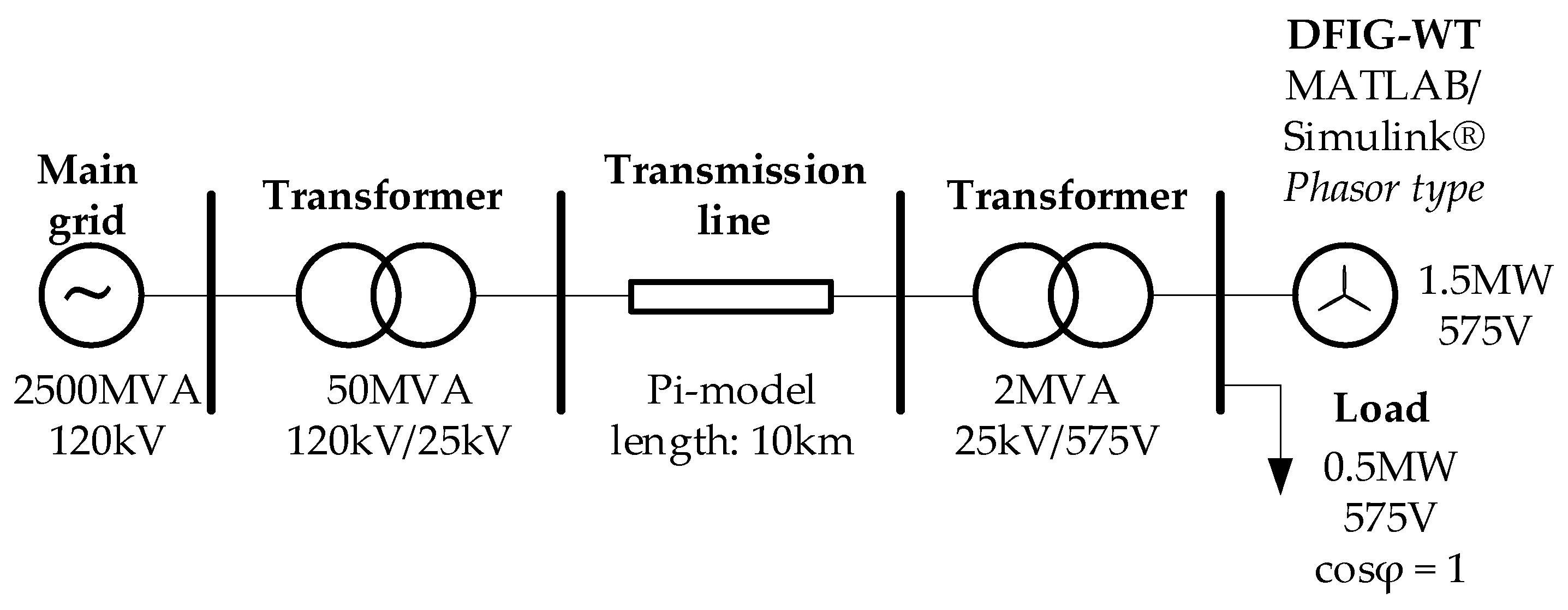
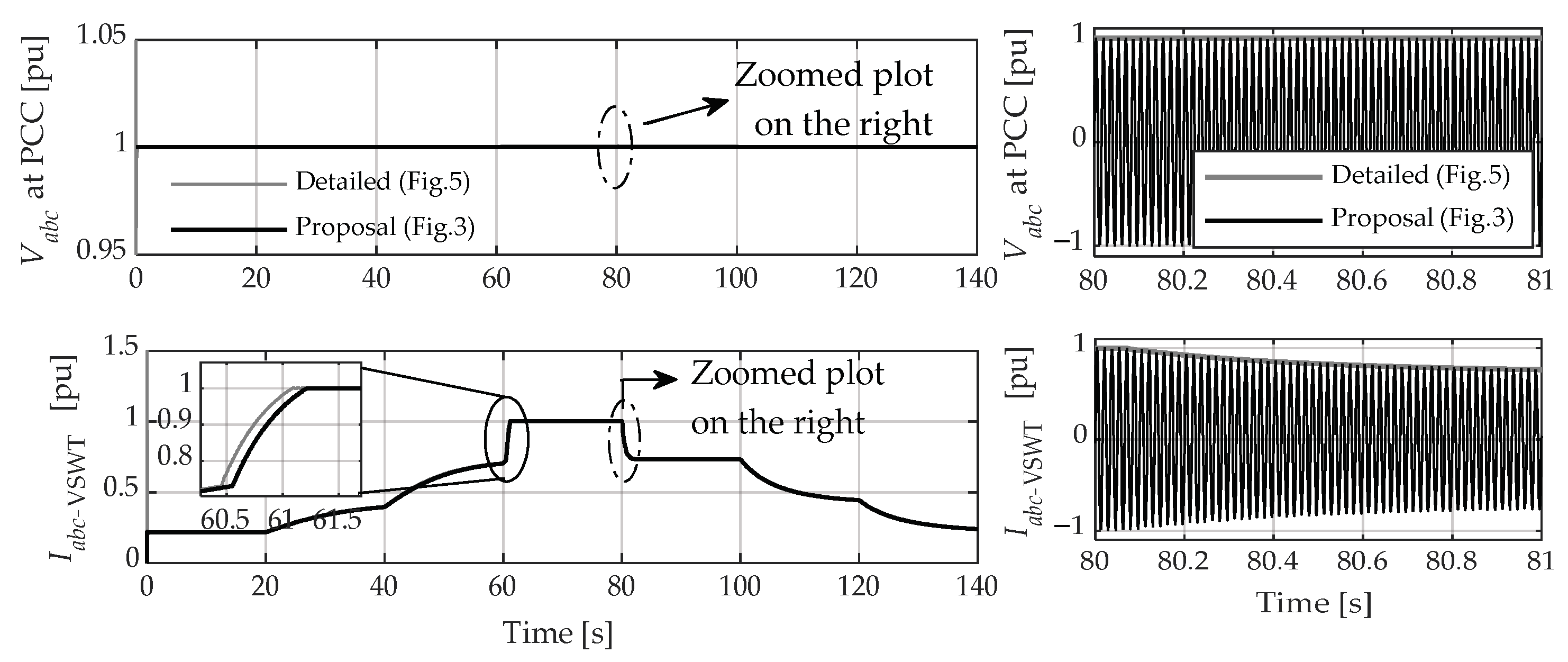
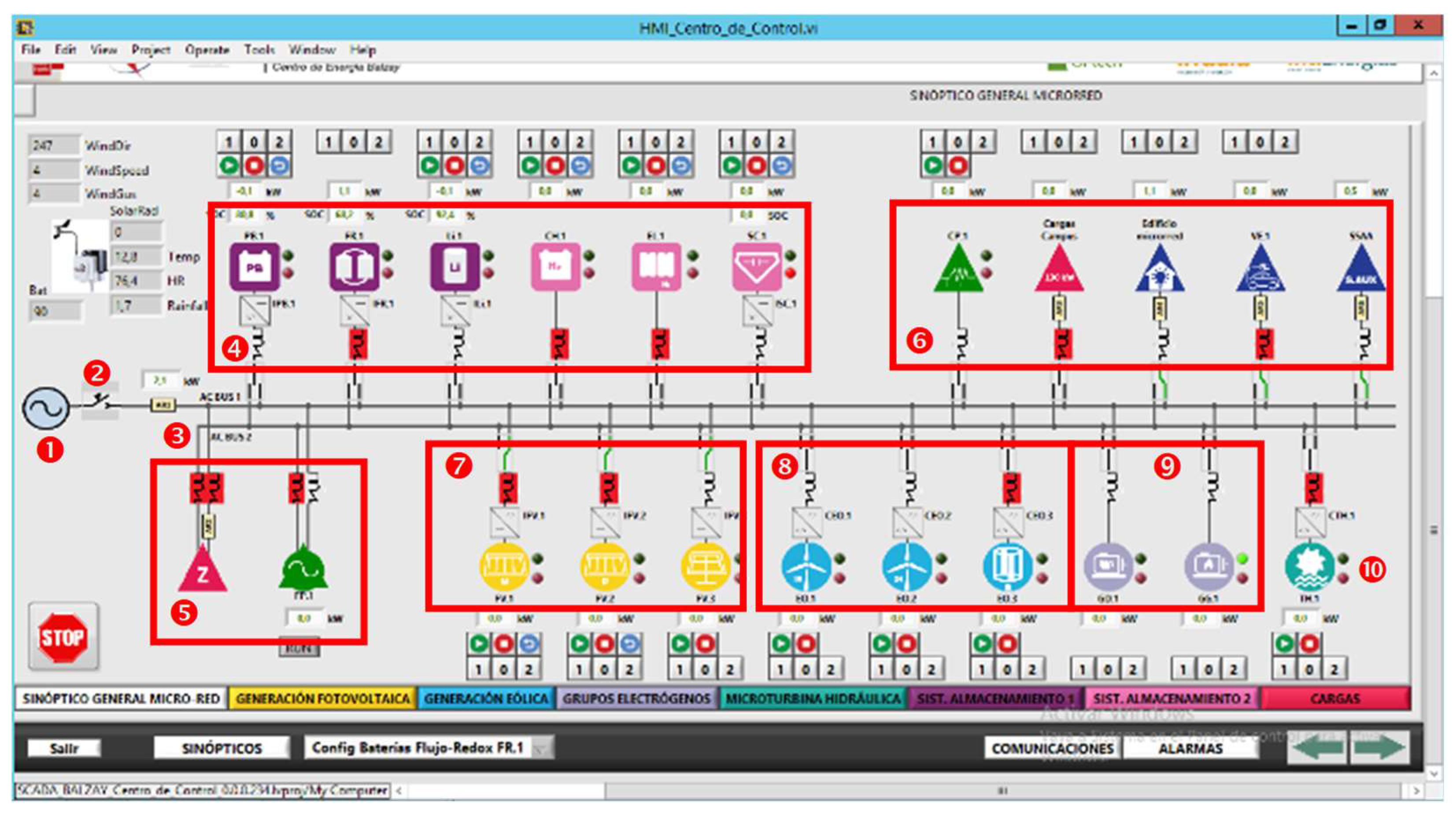
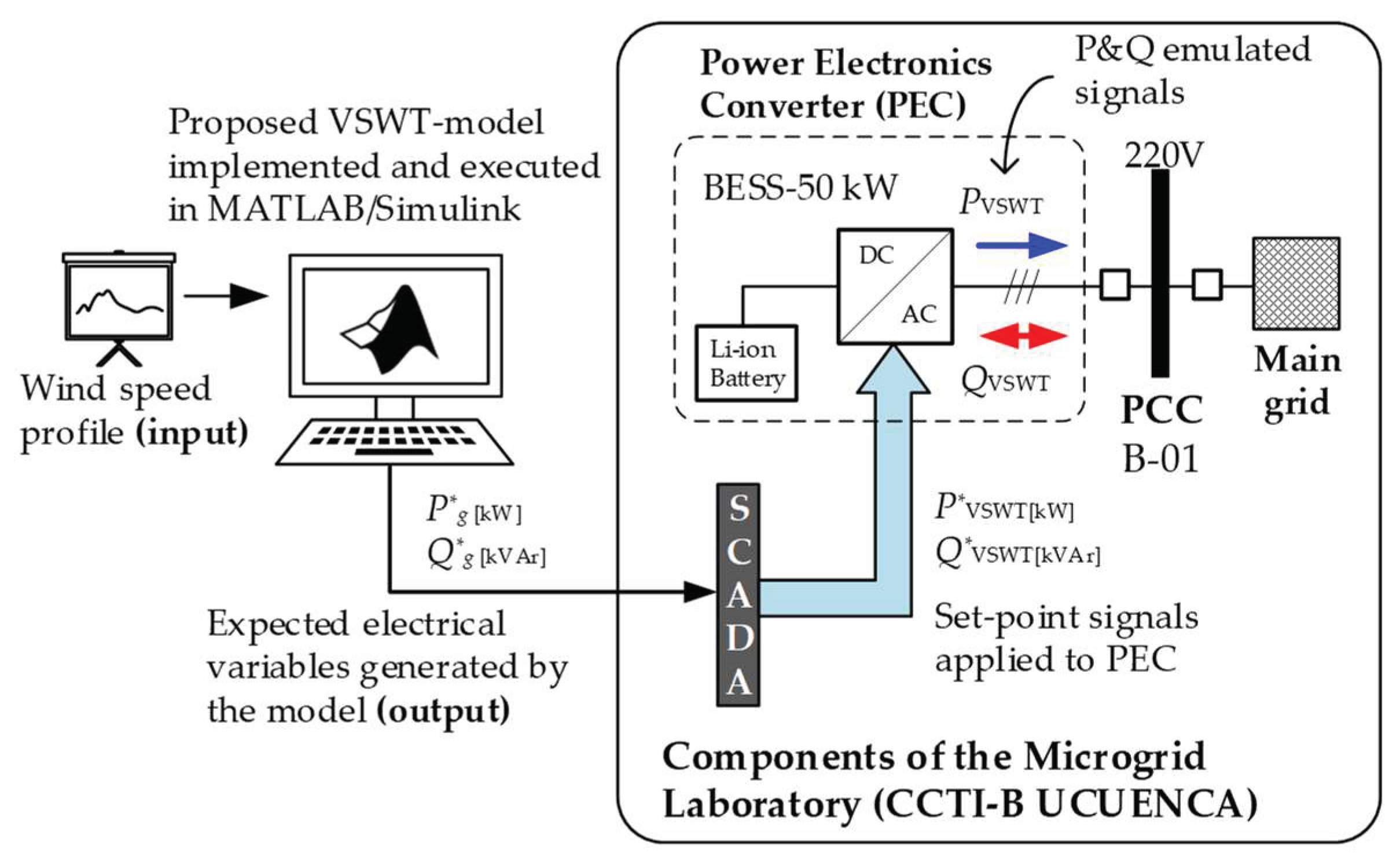
3.2. Comparison of the Expected and Emulated Model Results in the Laboratory
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- A.
- DFIG-WT parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value and Units |
|---|---|---|
| Base power | 1.5 MW | |
| Max./Min. power of the generator | 1/0.04 pu | |
| Max./Min. torque of the generator | 0.826/0.057 pu | |
| Wind speed at | 12 m/s | |
| Number of pole pairs | 2 | |
| Nominal frequency | 60 Hz | |
| Base speed of the turbine | 1.644 rad/s | |
| Base speed of the generator | 157.08 rad/s | |
| Air density | 1.225 kg/m3 | |
| Radius of the rotor | 38.5 m | |
| Power constant | ||
| Speed constant | 63.29 m/s | |
| Min./Max. blade pitch angle | 0°/45° | |
| Maximum blade pitch angle rate | 2°/s | |
| Turbine-generator inertia constant | 5.29 s | |
| DFIG-PEC time constant | 20 ms | |
| Blade pitch servo time constant | 0 s | |
| Pitch controller gains | 500/0 | |
| Speed controller gains | 0.3/8 |
- B.
- MPPT-curve parameters
Appendix B
| Utility Grid Parameters | Symbol | Value and Units |
|---|---|---|
| Three-phase source | 480 V | |
| f | 60 Hz | |
| Three-phase load | 1 kW | |
| Detailed model parameters | Symbol | Value and Units |
| Modulation SVPWM | 20 kHz | |
| PI controller | 50, 2500 | |
| RL filter series | 0.1 Ω | |
| 12.7 mH | ||
| DC voltage | 800 V | |
| Simplified model parameters | Symbol | Value and Units |
| Active power PI controller | 5, 50 | |
| Reactive power PI controller | −5, −50 | |
| Time constant (delay function) | 0.02 s |
References
- Worku, M.Y. Recent Advances in Energy Storage Systems for Renewable Source Grid Integration: A Comprehensive Review. Sustainability 2022, 14, 5985. [Google Scholar] [CrossRef]
- Tchakoua, P.; Wamkeue, R.; Ouhrouche, M.; Slaoui-Hasnaoui, F.; Tameghe, T.A.; Ekemb, G. Wind Turbine Condition Monitoring: State-of-the-Art Review, New Trends, and Future Challenges. Energies 2014, 7, 2595–2630. [Google Scholar] [CrossRef] [Green Version]
- Herbert-Acero, J.F.; Probst, O.; Réthoré, P.E.; Larsen, G.C.; Castillo-Villar, K.K. A Review of Methodological Approaches for the Design and Optimization of Wind Farms. Energies 2014, 7, 6930–7016. [Google Scholar] [CrossRef]
- Jaen-Cuellar, A.Y.; Elvira-Ortiz, D.A.; Osornio-Rios, R.A.; Antonino-Daviu, J.A. Advances in Fault Condition Monitoring for Solar Photovoltaic and Wind Turbine Energy Generation: A Review. Energies 2022, 15, 5404. [Google Scholar] [CrossRef]
- Aljafari, B.; Stephenraj, J.P.; Vairavasundaram, I.; Rassiah, R.S. Steady State Modeling and Performance Analysis of a Wind Turbine-Based Doubly Fed Induction Generator System with Rotor Control. Energies 2022, 15, 3327. [Google Scholar] [CrossRef]
- Haces-Fernandez, F.; Cruz-Mendoza, M.; Li, H. Onshore Wind Farm Development: Technologies and Layouts. Energies 2022, 15, 2381. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. A simplified electro-mechanical model of a DFIG-based wind turbine for primary frequency control studies. IEEE Lat. Am. Trans. 2016, 14, 3614–3620. [Google Scholar] [CrossRef] [Green Version]
- Ochoa, D.; Martinez, S. Fast-Frequency Response Provided by DFIG-Wind Turbines and its Impact on the Grid. IEEE Trans. Power Syst. 2017, 32, 4002–4011. [Google Scholar] [CrossRef]
- Kayikçi, M.; Milanović, J.V. Dynamic contribution of DFIG-based wind plants to system frequency disturbances. IEEE Trans. Power Syst. 2009, 24, 859–867. [Google Scholar] [CrossRef]
- Ihedrane, Y.; Bekkali, C.E.; Bossoufi, B.; Bouderbala, M. Control of Power of a DFIG Generator with MPPT Technique for Wind Turbines Variable Speed. In Modeling, Identification and Control Methods in Renewable Energy Systems. Green Energy and Technology; Derbel, N., Zhu, Q., Eds.; Springer: Singapore, 2018; pp. 105–129. [Google Scholar]
- Jenkal, H.; Lamnadi, M.; Mensou, S.; Bossoufi, B.; Boulezhar, A. A robust control for a variable wind speed conversion system energy based on a DFIG using Backstepping. Wind Eng. 2022, 19, 0309524X221122512. [Google Scholar] [CrossRef]
- Gianto, R. Constant voltage model of DFIG-based variable speed wind turbine for load flow analysis. Energies 2021, 14, 8549. [Google Scholar] [CrossRef]
- Seshadri Sravan Kumar, V.; Thukaram, D. Accurate modeling of doubly fed induction generator based wind farms in load flow analysis. Electr. Power Syst. Res. 2018, 155, 363–371. [Google Scholar]
- Prasad, R.M.; Mulla, M.A. Mathematical Modeling and Position-Sensorless Algorithm for Stator-Side Field-Oriented Control of Rotor-Tied DFIG in Rotor Flux Reference Frame. IEEE Trans. Energy Convers. 2020, 35, 631–639. [Google Scholar] [CrossRef]
- Behabtu, H.A.; Coosemans, T.; Berecibar, M.; Fante, K.A.; Kebede, A.A.; van Mierlo, J.; Messagie, M. Performance evaluation of grid-connected wind turbine generators. Energies 2021, 14, 6807. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Frequency dependent strategy for mitigating wind power fluctuations of a doubly-fed induction generator wind turbine based on virtual inertia control and blade pitch angle regulation. Renew. Energy 2018, 128, 108–124. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Proposals for Enhancing Frequency Control in Weak and Isolated Power Systems: Application to the Wind-Diesel Power System of San Cristobal Island-Ecuador. Energies 2018, 11, 910. [Google Scholar] [CrossRef] [Green Version]
- Ochoa, D. Modelo simplificado de una interfaz de conexión a la red basada en un convertidor electrónico de potencia para estudios de red en régimen dinámico. Ingenius 2021, 26, 87–98. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Rivera, M.; Rodríguez, J. A Computationally Efficient Lookup Table Based FCS-MPC for PMSM Drives Fed by Matrix Converters. IEEE Trans. Ind. Electron. 2017, 64, 7645–7654. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Rodriguez, J. Simplified Finite Control Set-Model Predictive Control for Matrix Converter-Fed PMSM Drives. IEEE Trans. Power Electron. 2018, 33, 2438–2446. [Google Scholar] [CrossRef]
- Lei, J.; Feng, S.; Wheeler, P.; Zhou, B.; Zhao, J. Steady-State Error Suppression and Simplified Implementation of Direct Source Current Control for Matrix Converter with Model Predictive Control. IEEE Trans. Power Electron. 2020, 35, 3183–3194. [Google Scholar] [CrossRef]
- Bhesaniya, M.M.; Shukla, A. Computationally efficient method for simulating current source modular multilevel converter. In Proceedings of the 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016. [Google Scholar]
- Schmidlin Junior, C.R.; Araujo Lima, F.K. Wind Turbine and PMSG Dynamic Modelling in PSIM. IEEE Lat. Am. Trans. 2016, 14, 4115–4120. [Google Scholar] [CrossRef]
- Reyes, V.; Rodriguez, J.J.; Carranza, O.; Ortega, R. Review of mathematical models of both the power coefficient and the torque coefficient in wind turbines. In Proceedings of the IEEE 24th International Symposium on Industrial Electronics (ISIE), Buzios, Brazil, 3–5 June 2015. [Google Scholar]
- MathWorks—Makers of MATLAB and Simulink—MATLAB & Simulink, (n.d.). Available online: https://www.mathworks.com/ (accessed on 14 October 2022).
- Espinoza, J.L.; Gonzalez, L.G.; Sempertegui, R. Micro grid laboratory as a tool for research on non-conventional energy sources in Ecuador. In Proceedings of the 2017 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 8–10 November 2017. [Google Scholar]
- Rey, J.M.; Vera, G.A.; Acevedo-Rueda, P.; Solano, J.; Mantilla, M.A.; Llanos, J.; Saez, D. A Review of Microgrids in Latin America: Laboratories and Test Systems. IEEE Lat. Am. Trans. 2022, 20, 1000–1011. [Google Scholar] [CrossRef]















| Computer and Processor Features | ||
|---|---|---|
| Processor: Intel(R) Core(TM) i7-4510U CPU @ 2.00 GHz 2.60 GHz. Installed RAM: 8.00 GB (7.89 GB usable). OS Type: 64-bit OS, x64-based processor. | ||
| Simulator features | ||
| MATLAB R2020a Update 6 (9.8.0.1538580) | ||
| Simulated model | Detailed (Figure 5) | Proposed (Figure 3) |
| Computer usage | ||
| Used RAM (% of total GB) | 87 | 68 |
| Used CPU (% of total GHz) | 35 | 34 |
| Simulator parameter | ||
| Simulation type | Phasor | Continuous |
| Solver | ode14x (extrapolation) | ode23tb (stiff/TR-BDF2) |
| Step size | 10−3 s (Fixed-step) | Max. 10−3 s (Variable-step) |
| Elapsed simulation time | 84.97 s | 18.46 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ochoa, D.; Martinez, S.; Arévalo, P. Extended Simplified Electro-Mechanical Model of a Variable-Speed Wind Turbine for Grid Integration Studies: Emulation and Validation on a Microgrid Lab. Electronics 2022, 11, 3945. https://doi.org/10.3390/electronics11233945
Ochoa D, Martinez S, Arévalo P. Extended Simplified Electro-Mechanical Model of a Variable-Speed Wind Turbine for Grid Integration Studies: Emulation and Validation on a Microgrid Lab. Electronics. 2022; 11(23):3945. https://doi.org/10.3390/electronics11233945
Chicago/Turabian StyleOchoa, Danny, Sergio Martinez, and Paul Arévalo. 2022. "Extended Simplified Electro-Mechanical Model of a Variable-Speed Wind Turbine for Grid Integration Studies: Emulation and Validation on a Microgrid Lab" Electronics 11, no. 23: 3945. https://doi.org/10.3390/electronics11233945
APA StyleOchoa, D., Martinez, S., & Arévalo, P. (2022). Extended Simplified Electro-Mechanical Model of a Variable-Speed Wind Turbine for Grid Integration Studies: Emulation and Validation on a Microgrid Lab. Electronics, 11(23), 3945. https://doi.org/10.3390/electronics11233945