

Design Optimization of an Efficient Bicolor LED Driving System


Abstract
:1. Introduction
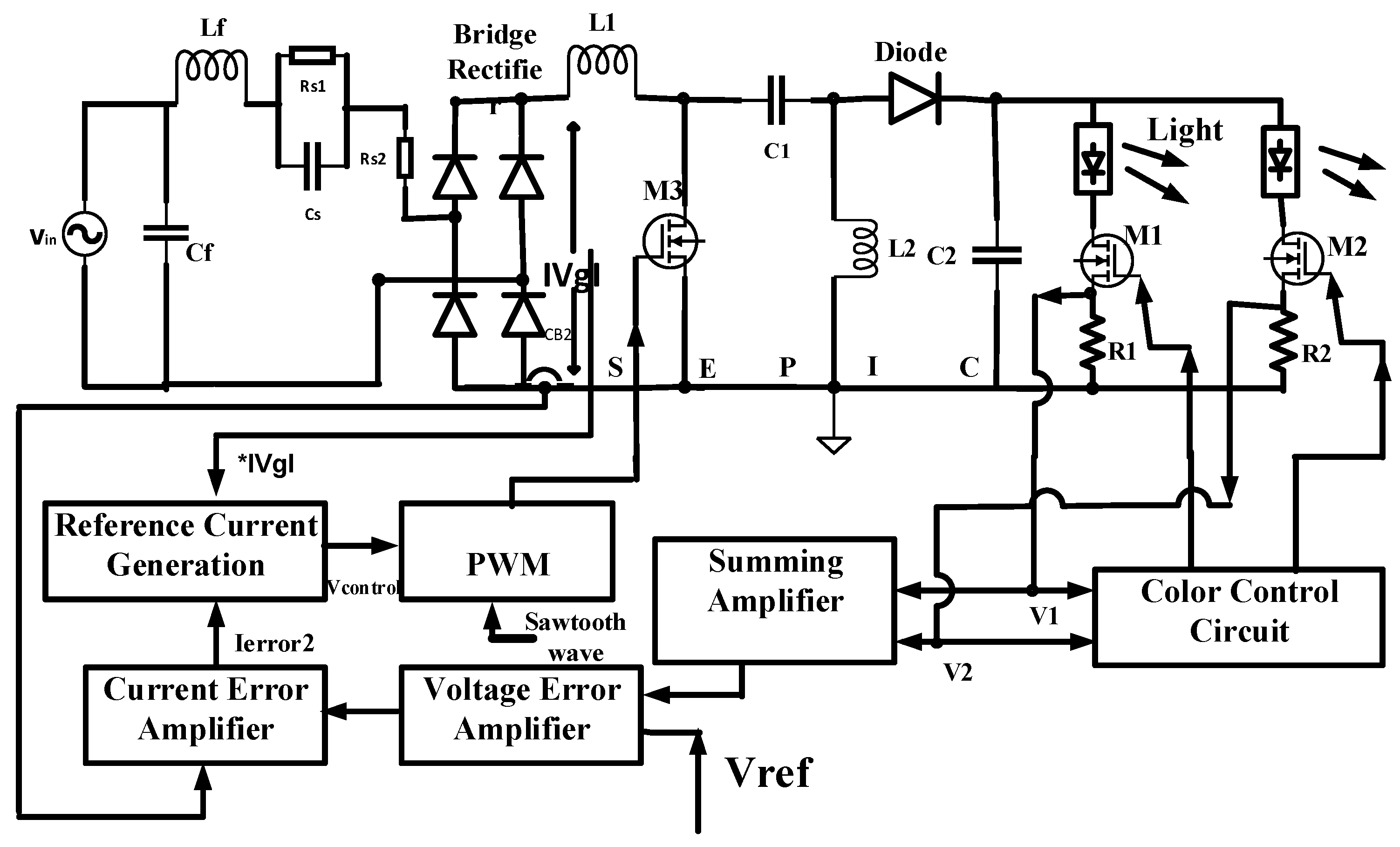
2. Basic Configuration and Driver Topology
3. Nonlinear Optimization Approach
4. Nonlinear Optimization for Reduction of CCT Deviation
Creation of Optimization Problem
5. Proposed Color Control Scheme
6. Proposed Parametric Optimization Method for Harmonic Reduction
6.1. Expression for the Optimization Problem
6.2. Formation of Constraint with Boundary
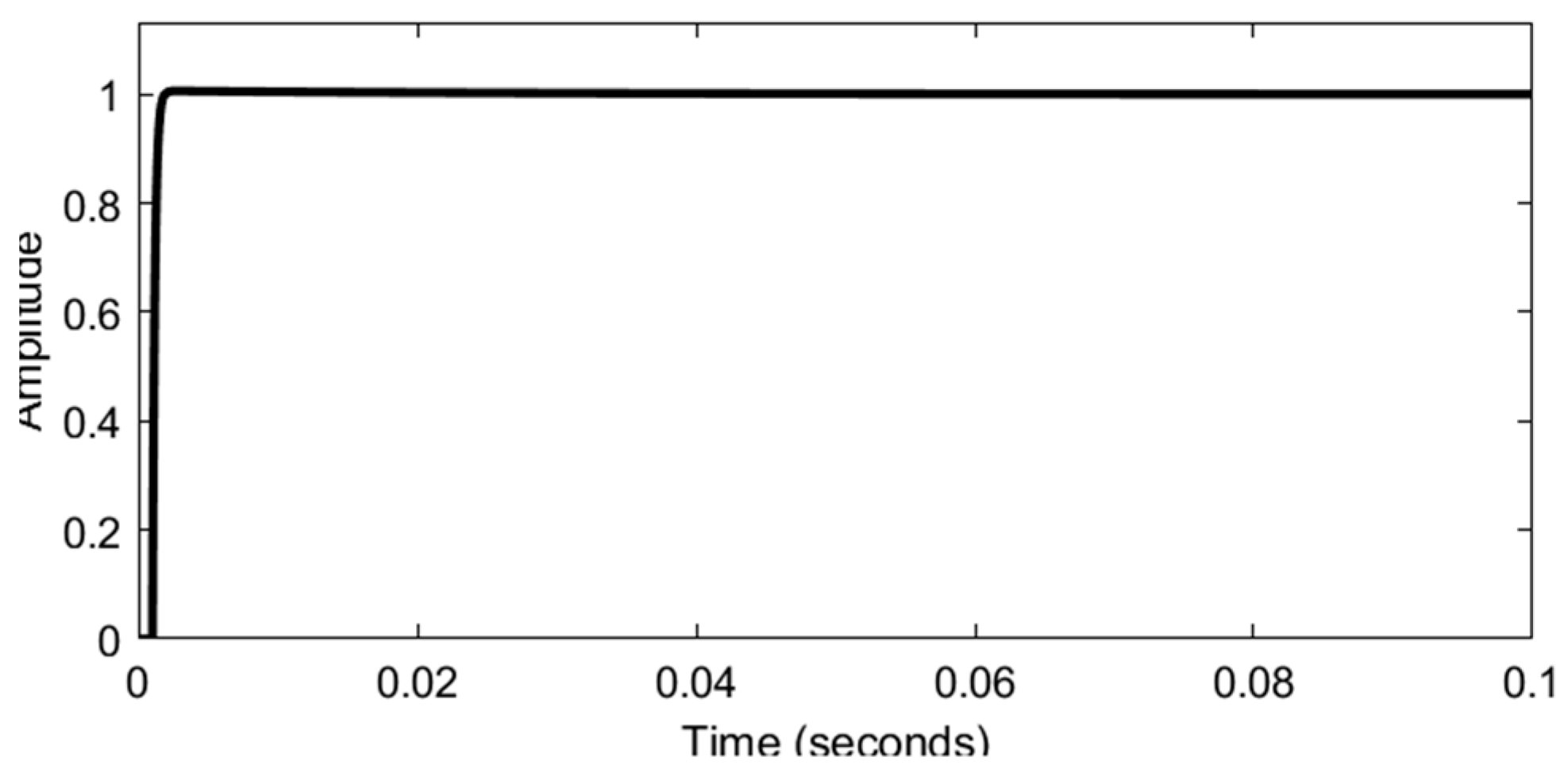
7. Stability Studies
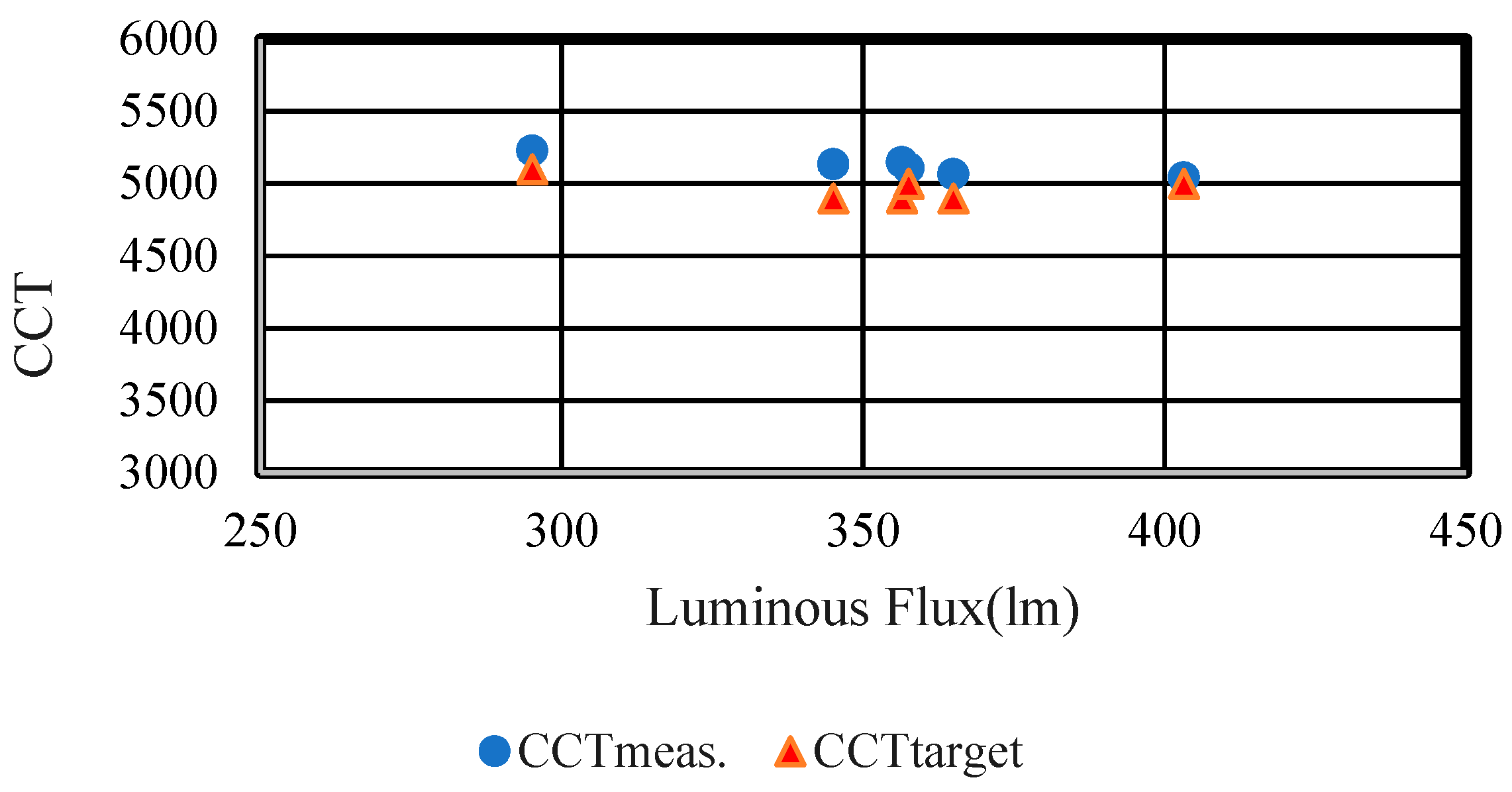
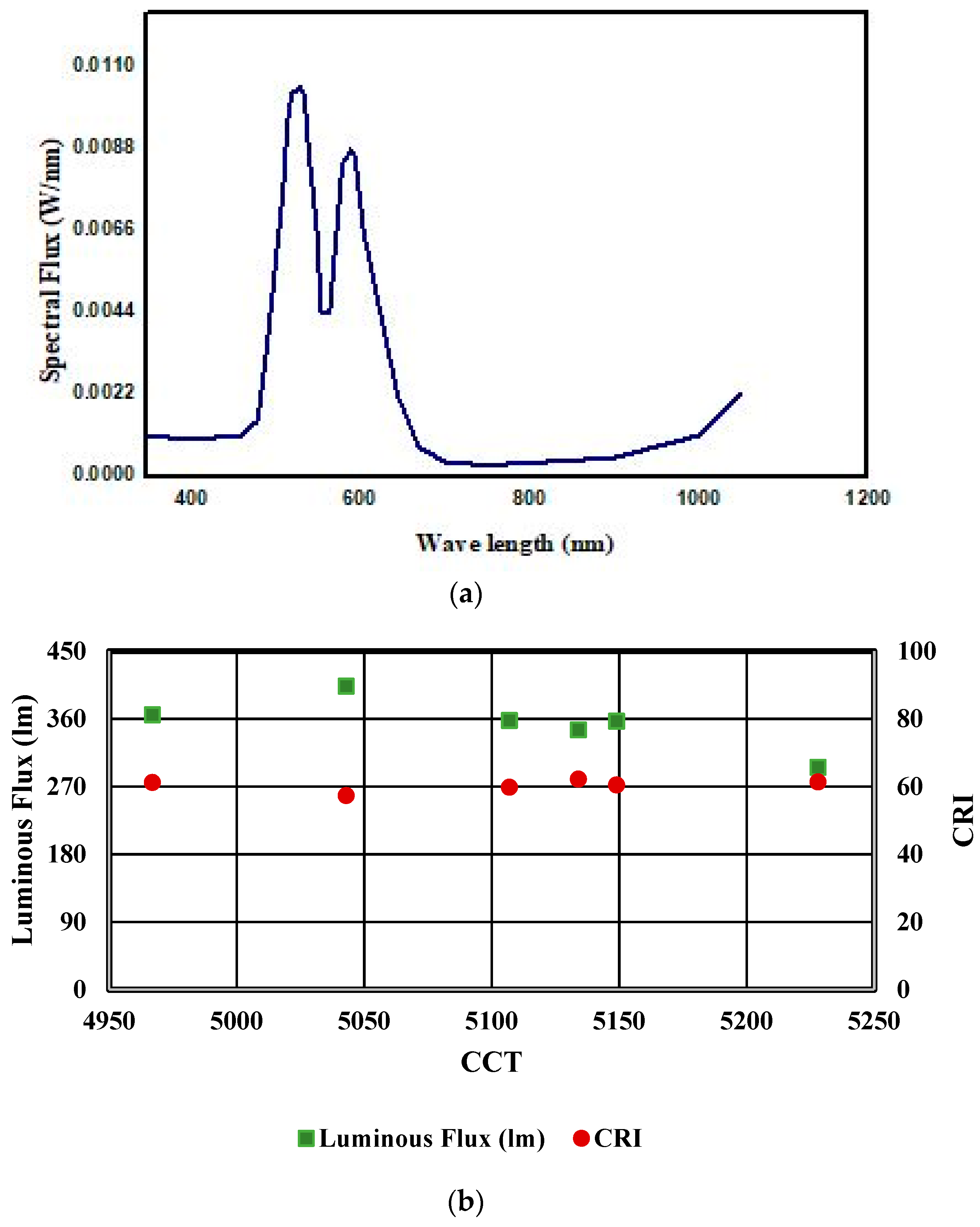
8. Results
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CCT | Corelate color temperature |
| CRI | Color rendering index |
| THD | Total harmonic distortion |
| P.F. | Power factor |
| Output current | |
| D | Duty cycle |
| Rectified input voltage | |
| εi | Luminous efficacy |
| φ1, φ2 | Luminous flux of LED 1 and 2 |
| , | Equivalent resistance of strings 1 and 2 |
| SEPIC | Single-ended primary inductor converter |
| Duty cycle of MOS of 1st and 2nd LED strings | |
| CCT of target point | |
| Estimated CCT | |
| Deviation between target and estimated CCT | |
| R1, R2 | Sense resistor of LED strings 1 and 2 |
| PWM | Pulse width modulation |
| ΔIL1 | Inductor current increment |
| , | Series resistors 1 and 2 of RC circuit |
References
- Zhan, X.; Wang, W.; Chung, H. A novel Color Control Method for Multi-colour LED Systems to Achieve High Colour Rendering Indexes. IEEE Trans. Power Electron. 2018, 33, 8246–8258. [Google Scholar] [CrossRef]
- Chen, H.T.; Tan, S.C.; Hui, S.Y.R. Colour variation reduction of GaN-based white light-emitting diodes via peak-wavelength stabilization. IEEE Trans. Power Electron. 2014, 29, 3709–3719. [Google Scholar] [CrossRef] [Green Version]
- Hui, S.Y.R.; Qin, Y.X. A general photo-electro-thermal theory for light-emitting-diode (LED) systems. IEEE Trans. Power Electron. 2009, 24, 1967–1976. [Google Scholar] [CrossRef]
- Paschotta, R. Encyclopedia of Laser Physics and Technology; Wiley: New York, NY, USA, 2008. [Google Scholar]
- Mills, P.R.; Tomkins, S.C.; Schlangen, L.J.M. The effect of high correlated color temperature office lighting on employee wellbeing and work performance. J. Circadian Rhythm. 2007, 5, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Yau, T.Y.; Hwu, K.I.; Liu, K.J. AC–DC Flyback Dimmable LED Driver with Low-Frequency Current Ripple Reduced and Power Dissipation in BJT Linearly Proportional to LED Current. J. Energies 2020, 13, 4270. [Google Scholar] [CrossRef]
- Nassary, M.; Orabi, M.; Ahmed, E.M.; Hasaneen, E.-S.; Gaafar, M. Modified Harmonic Injection Technique for Electrolytic Capacitor-Less LED Driver. In Proceedings of the Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1459–1464. [Google Scholar]
- Ferdous, S.M.; Oninda, M.A.M.; Sarowar, G.; Islam, K.K.; Hoque, M.A. Non-Isolated Single Stage PFC based LED Driver with THD Minimization using Cúk Converter. In Proceedings of the 9th International Conference on Electrical and Computer Engineering, Dhaka, Bangladesh, 16 February 2017; pp. 471–474. [Google Scholar]
- Yoomak, S.; Ngaopitakkul, A. The Study of Harmonic Reduction in Light Emitting Diode (LED) Roadway Lighting System. In Proceedings of the 17th International Scientific Conference on Electrical Power Engineering (EPE), Prague, Czech Republic, 16–18 May 2016; pp. 1–5. [Google Scholar]
- Miao, C.H. Colour Temperature Adjustable Lamp. U.S. Patent US8159125B2, 17 April 2012. [Google Scholar]
- Jonsson, K. Light with Changeable Color Temperature. U.S. Patent US20120146505A1, 20 November 2012. [Google Scholar]
- Schubert, E.F. Light-Emitting Diodes, 2nd ed.; Cambridge University Press: Cambridge, UK, 2016; pp. 332–346. [Google Scholar]
- Muthu, S.; Schuurmans, F.J.; Pashley, M.D. Red, green, and blue LEDs for white light illumination. IEEE Trans. J. Sel. Top. Quantum Electron. 2002, 8, 333–338. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.C.; Tang, C.-W.; Huang, B.J. Multivariable robust control for a red-green-blue LED lighting system. IEEE Trans. Power Electron. 2012, 25, 417–428. [Google Scholar] [CrossRef]
- Tang, C.W.; Huang, B.J.; Ying, S.-P. Illumination and color control in red -green-blue light-emitting diode. IEEE Trans. Power Electron. 2014, 29, 4921–4937. [Google Scholar] [CrossRef]
- Zhao, H.; Lee, S.W.R. Determination of Driving Current of RGB LEDs for White Light Illumination. In Proceedings of the 13th International Conference on Electronic Packaging Technology & High Density Packaging, Guilin, China, 13–16 August 2012; pp. 1540–1545. [Google Scholar]
- Qu, X.H.; Wong, S.C.; Tse, C.K. Temperature measurement technique for stabilizing the light output of RGB LED lamps. IEEE Trans. IEEE Trans. Instrum. Meas. 2010, 59, 661–670. [Google Scholar]
- Gilman, J.M.; Miller, M.E.; Grimaila, M.R. A simplified control system for a daylight-matched LED lamp. Light. Res. Technol. 2013, 45, 614–629. [Google Scholar] [CrossRef]
- Available online: https://docplayer.net/203504867-White-paper-color-management-of-a-red-green-and-blue-led-combinational-light-source-abstract-using-rgb-leds.html (accessed on 30 October 2022).
- Górecki, K.; Ptak, P. Modeling power supplies of LED lamps. Int. J. Circuit Theory Appl. 2018, 46, 629–663. [Google Scholar] [CrossRef]
- Rata, G.; Rata, M. The study of harmonics from dimmable LED lamps, using CompactRIO. In Proceedings of the 2016 International Conference on Development and Application Systems (DAS), Suceava, Romania, 19–21 May 2016; pp. 180–183. [Google Scholar]
- Pollock, A.; Pollock, H.; Pollock, C. High Efficiency LED Power Supply. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 617–623. [Google Scholar] [CrossRef]
- Uddin, S.; Shareef, H.; Mohamed, A.; Hannan, M.A. Harmonics and thermal characteristics of low wattage LED lamps. Przegląd Elektrotechniczny 2012, 88, 266–271. [Google Scholar]
- Lho, Y.H.; Lee, S.Y. A Study on methodology to improve the power factor of high-power LED module. In Proceedings of the 2014, 14th International Conference on Control, Automation and Systems (ICCAS 2014), Seoul, Republic of Korea, 22 October 2014; pp. 1404–1406. [Google Scholar]
- Górecki, K. The influence of power supply voltage on exploitive parameters of the selected lamps. Inf. MIDEM-J. Microelectron. Electron. Compon. Mater. 2013, 43, 193–198. [Google Scholar]
- Uddin, S.; Shareef, H.; Mohamed, A.; Hannan, M. An analysis of harmonics from dimmable LED lamps. In Proceedings of the 2012 IEEE International Power Engineering and Optimization Conference, Melaka, Malaysia, 6–7 June 2012; pp. 182–186. [Google Scholar]
- Ionescu, C.; Dima, M.; Bonfert, D. Flicker distortion power factor analysis in lighting LED’s. In Proceedings of the 2017 IEEE 23rd International Symposium for Design and Technology in Electronic Packaging (SIITME), Constanta, Romania, 26–29 October 2017; pp. 280–285. [Google Scholar]
- Li, Y.C. A novel control scheme of quasi-resonant valley-switching for high-power-factor AC-to-DC LED drivers. IEEE Trans. Ind. Electron. 2015, 62, 4787–4794. [Google Scholar] [CrossRef]
- Liu, P.J.; Hsu, Y.-C. Boost converter with adaptive reference tracking control for dimmable white LED drivers. Microelectron 2015, 46, 513–518. [Google Scholar] [CrossRef]
- Liu, P.J.; Peng, K.L. Adaptive Driving Bus Voltage and Energy Recycling Control Schemes for Low- Power AC–DC RGB-LED Drivers. IEEE Trans. Power Electron. 2017, 64, 7741–7748. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, H.; Dongsheng, M. A VO-Hopping Reconfigurable RGB LED Driver with Automatic Detection and Predictive Peak current Control. IEEE J. Solid-State Circuits 2015, 50, 1287–1298. [Google Scholar] [CrossRef]
- Zhan, X.; Chung, H.; Zhang, R. Investigation into the Use of Single Inductor for Driving Multiple Series-Connected LED Channels. IEEE Trans. Power Electron. 2017, 32, 3034–3050. [Google Scholar] [CrossRef]
- Ng, S.K.; Loo, K.H.; Lai, Y.M.; Tse, C.K. Color Control System for RGB LED with Application to Light Sources Suffering from Prolonged Aging. IEEE Trans. Ind. Electron. 2014, 61, 1784–1798. [Google Scholar] [CrossRef]
- Lee, A.; Sin, J.; Chan, P. Scalability of quasi-hysteretic FSM based digitally controlled single-inductor dual-string buck LED driver to multiple strings. IEEE Trans. Power. Electron. 2014, 29, 501–513. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.C.; Yoon, C.S.; Ju, H.; Jeong, D.-K.; Kim, J. An AC-powered, flicker-free, multi-channel LED driver with current-balancing SIMO buck topology for large area lighting applications. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition-APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 3337–3341. [Google Scholar]
- Zhang, W.; Sutardja, P. Correlated Color Temperature Control Methods and Devices. U.S. Patent US20130020956 A1, 24 January 2013. [Google Scholar]
- Wang, H.-C.; Chen, Y.T.; Lin, J.T.; Chiang, C.P.; Cheng, F.H. Enhanced visualization of oral cavity for early inflamed tissue detection. Optics Express 2010, 18, 11800–11809. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.S.; Lin, C.Y.; Yeh, C.M.; Kuo, C.T.; Hsu, C.W.; Wang, H.C. Anti-glare LED lamps with adjustable illumination light field. Optics Express 2014, 22, 5. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.T.; Tan, S.C. Nonlinear Dimming and Correlated Color Temperature Control of Bi-Color White LED Systems. IEEE Trans. Power Electron. 2014, 30, 6934–6947. [Google Scholar] [CrossRef] [Green Version]
- Malik, R.; Ray, K.; Mazumdar, S. Wide range, Open-loop, CCT and Illuminance Control of an LED Lamp using Two-component Colour Blending. IEEE Trans. Power Electron. 2017, 33, 9803–9818. [Google Scholar] [CrossRef]
- Lee, A.T.L.; Chen, H.; Tan, S.C.; Hui, S.Y. Precise Dimming and Colour Control of LED Systems Based on Color Mixing. IEEE Trans. Power Electron. 2016, 31, 65–80. [Google Scholar] [CrossRef] [Green Version]
- Lohaus, L.; Leicht, E.; Dietrich, S.; Wunderlich, R.; Heinen, S. Advanced Color Control for Multicolor LED Illumination Systems with Parametric Optimization. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 3305–3310. [Google Scholar]
- Ferdous, F.; Rashid, A.B.M.H. Design of a High-Performance AC-DC LED Driver Based on SEPIC Topology. Int. J. Power Electron. Drive Syst. (IJPEDS) 2021, 12, 870–885. [Google Scholar] [CrossRef]
- Pal, S.; Singh, B.; Chandra, A. A Novel Ambiance Changing Energy Saving LED Lighting System with PFM Operated Zeta Converter. In Proceedings of the 2015 IEEE Industry Applications Society Annual Meeting, Addison, TX, USA, 18–22 October 2015; pp. 1–8. [Google Scholar]
- Germaine, C.P.; Lee, A.T.; Tan, S.C.; Hui, S.R. Precise Luminous Flux and Color Temperature Control of Dimmable Bi- Colour White Light-Emitting Diode Systems. In Proceedings of the 2022 IEEE Applied Power Electronics Conference and Exposition (APEC), Houston, TX, USA, 20–24 March 2022. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LED Current (mA) | CCT Target | CCT Meas. | CCT Dev. | % Error | CRI | |
|---|---|---|---|---|---|---|
| ILED1 | ILED2 | |||||
| 220 | 512 | 5100 | 5228 | 128 | 2.50 | 61.34 |
| 250 | 520 | 4900 | 5134 | 234 | 4.78 | 62.17 |
| 270 | 543 | 4900 | 5149 | 149 | 5.08 | 60.46 |
| 278 | 563 | 4900 | 4967 | 67 | 1.36 | 61.14 |
| 282 | 610 | 5000 | 5107 | 107 | 2.14 | 59.73 |
| 290 | 610 | 5000 | 5043 | 43 | 0.86 | 57.32 |
| Parameters | Values |
|---|---|
| Input inductor, L1 | 10 mH |
| Output inductor, L2 | 100 μH |
| Input capacitor, C1 | 0.01 μF/600 V |
| Input Filter Inductor, Lf | 10 mH |
| Input Filter Capacitor, Cf | 0.94 μF |
| Duty Cycle, Dmax | 0.21 |
| Power Diode | 1000 V/10 A |
| Power MOS, M3 | 12 N60 (600 V/12 A) |
| Operating Voltage | 220 V |
| MOS Switch, M1, M2 | K2098 |
| No. of String | Duty Cycle (%) | LED Current (mA) | LED Voltage (V) | CCT | % CCT Deviation | Luminous Flux | CRI |
|---|---|---|---|---|---|---|---|
| 1 | 42.55 | 236 | 23.4 | 4955 | 0.90 | 381.69 | 58.21 |
| 63 | 330 | 24.4 | 5104 | 2.08 | 401.69 | 49.81 | |
| 2 | 11.61 | 264 | 24.6 | 4719 | 5.62 | 379.63 | 62.64 |
| 36.65 | 460 | 24.6 | 4790 | 4.20 | 300.07 | 63.21 |
| Vs (Volt) | Is (mA) | P.F. | THD | VLED1 (Volt) | ILED1 (mA) | VLED2 (Volts) | ILED2 (mA) | Efficiency % |
|---|---|---|---|---|---|---|---|---|
| 90 | 206 | 0.988 | 1.27 | 23.1 | 220 | 23.8 | 512 | 91.6 |
| 110 | 190 | 0.981 | 2.40 | 23.8 | 250 | 24.0 | 520 | 90.7 |
| 150 | 150 | 0.980 | 5.40 | 24.0 | 270 | 24.5 | 543 | 88.5 |
| 180 | 125 | 0.977 | 4.36 | 24.0 | 278 | 24.5 | 563 | 91.8 |
| 200 | 115 | 0.960 | 4.15 | 24.6 | 282 | 24.8 | 580 | 95.3 |
| 220 | 110 | 0.960 | 4.37 | 24.0 | 290 | 24.4 | 610 | 92.8 |
| Bicolor White LED Light | Luminous Flux (lm) | CCT Measured | CCT Desired | CCT Deviation |
|---|---|---|---|---|
| CCTC = 5000 K | 100 | 2754 | 3300 | 546 |
| CCTw = 2700 K | 289 | 3814 | 4000 | 186 |
| (Linear approach) [39] | 455 | 2798 | 3300 | 502 |
| CCTC = 6500 K | 274.57 | 4713 | 4900 | 187 |
| CCTw = 1000 K | 354.86 | 5070 | 5000 | 70 |
| (Proposed) | 401.69 | 5404 | 5300 | 104 |
| CCTC = 5000 K | ||||
| CCTw = 2700 K | 95 | 3250 | 3300 | 50 |
| (Non-linear approach) | 296 | 5515 | 5400 | 115 |
| [39] | 562 | 3392 | 3300 | 92 |
| CCTC = 7500 K | - | 3050 | 3000 | 50 |
| CCTw = 2700 K | - | 3410 | 3400 | 10 |
| [41] | - | 3505 | 3500 | 05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferdous, F.; Harun-ur Rashid, A.B.M. Design Optimization of an Efficient Bicolor LED Driving System. Electronics 2022, 11, 3984. https://doi.org/10.3390/electronics11233984
Ferdous F, Harun-ur Rashid ABM. Design Optimization of an Efficient Bicolor LED Driving System. Electronics. 2022; 11(23):3984. https://doi.org/10.3390/electronics11233984
Chicago/Turabian StyleFerdous, Fouzia, and A.B.M. Harun-ur Rashid. 2022. "Design Optimization of an Efficient Bicolor LED Driving System" Electronics 11, no. 23: 3984. https://doi.org/10.3390/electronics11233984
APA StyleFerdous, F., & Harun-ur Rashid, A. B. M. (2022). Design Optimization of an Efficient Bicolor LED Driving System. Electronics, 11(23), 3984. https://doi.org/10.3390/electronics11233984