1. Introduction
At present, the traditional task planning algorithm exposes many defects, resulting in low efficiency of path planning. This paper poses an attempt to apply multi-objective optimization algorithm to UAV mission planning and path optimization. In this paper, online task planning, search rules and clustering formation control are studied and analyzed using an agent-based intelligent modeling method, and then combined with multi-objective optimization algorithm. UAV task planning and optimization are innovated from three aspects of task allocation, route planning and planning evaluation. The research shows that the optimization method proposed in this paper improves the path search efficiency and task completion of UAV.
With the development of science and technology, the application of UAV has become more and more extensive, and the research on modeling is also ever increasing. Baldi Simone proposed a new design method of adaptive autopilot, and studied the uncertain Eulerian Lagrangian dynamics based on UAV, in which the control can explicitly consider the driving problem in dynamics and reduce the structural knowledge of cross coupling and trim points [
1]. Wang Ximan proposed a new vector field rule, which can deal with the uncertain course time constant and state related uncertainty in course dynamics caused by coupling. Then the stability is studied under the framework of Lyapunov, and the reliability of the proposed method is tested on the loop UAV simulator. Simulation results show that the proposed method is superior to the standard vector field method in the presence of such uncertainty [
2]. Spandan Roy has studied an autopilot framework in which there is no need to understand UAV dynamics and trim points. The proposed design can simulate the behavior of a carefully adjusted ready-made autopilot without using its prior knowledge through complex unmanned vehicle dynamics tests [
3]. Wang Ximan proposed a vector field method which does not require prior knowledge of UAV heading time constant, coupling effect and wind direction. Stability and performance are evaluated using Lyapunov theory. The method has been tested on the software and hardware in the loop UAV platforms, which shows that the proposed guidance law is superior to the most advanced guidance controller and standard vector field method in the presence of significant uncertainties [
4].
Multi-objective optimization algorithm is outstanding in dealing with optimization problems. At present, the research into UAV is increasing. Zhou D proposed a multi-objective optimization algorithm based on collaborative path planning and accurately planned the cooperative combat path of UAV by introducing the cooperative evolution strategy [
5]. WY Ruan applied the multi-objective pigeon swarm optimization algorithm to the UAV formation obstacle avoidance process. The effectiveness of the proposed algorithm was verified by simulating the flight process of UAV in a complex, obstacle-filled environment [
6]. Yan F applied the multi-objective particle optimization algorithm to the path planning method of the rotating UAV. The simulation results showed that the algorithm can improve the accuracy of path optimization [
7]. Tseng FH designed a UAV tracking model by applying a multi-objective optimization algorithm. The simulation results showed that the model is reasonable and the tracking effect is good [
8]. Yang F applied the multi-objective optimization algorithm to the UAV wing design and improved the aerodynamic performance of the airframe by using the wings [
9]. Wei M proposed a UAV flight path search model in combination with the multi-objective optimization algorithm and verified the effectiveness of the model through experimental comparison [
10]. Zhou W applied the multi-objective optimization algorithm to the research of UAV flight efficiency, which improved the flight efficiency through path arrangement [
11]. These researches on the application of multi-objective optimization algorithm to UAV are relatively detailed, but there are few related to UAV path planning modeling.
Mission planning and path selection have always been the focuses of UAV operation. However, with the continuous advancement of science and technology, the traditional task planning method can no longer meet the task planning requirements in the new era. This paper first analyzed the modeling of UAV intelligent modeling method based on the agent and then used multi-objective optimization algorithm to model the task allocation and path planning. The final experimental results showed that the new method proposed in this paper can obviously improve the efficiency of UAV mission planning.
3. UAV Cluster Intelligent Planning Modeling Method
The intelligent modeling of UAV cluster is mainly embodied in three aspects: online task planning, search rules and cluster formation control.
(1) Online task planning
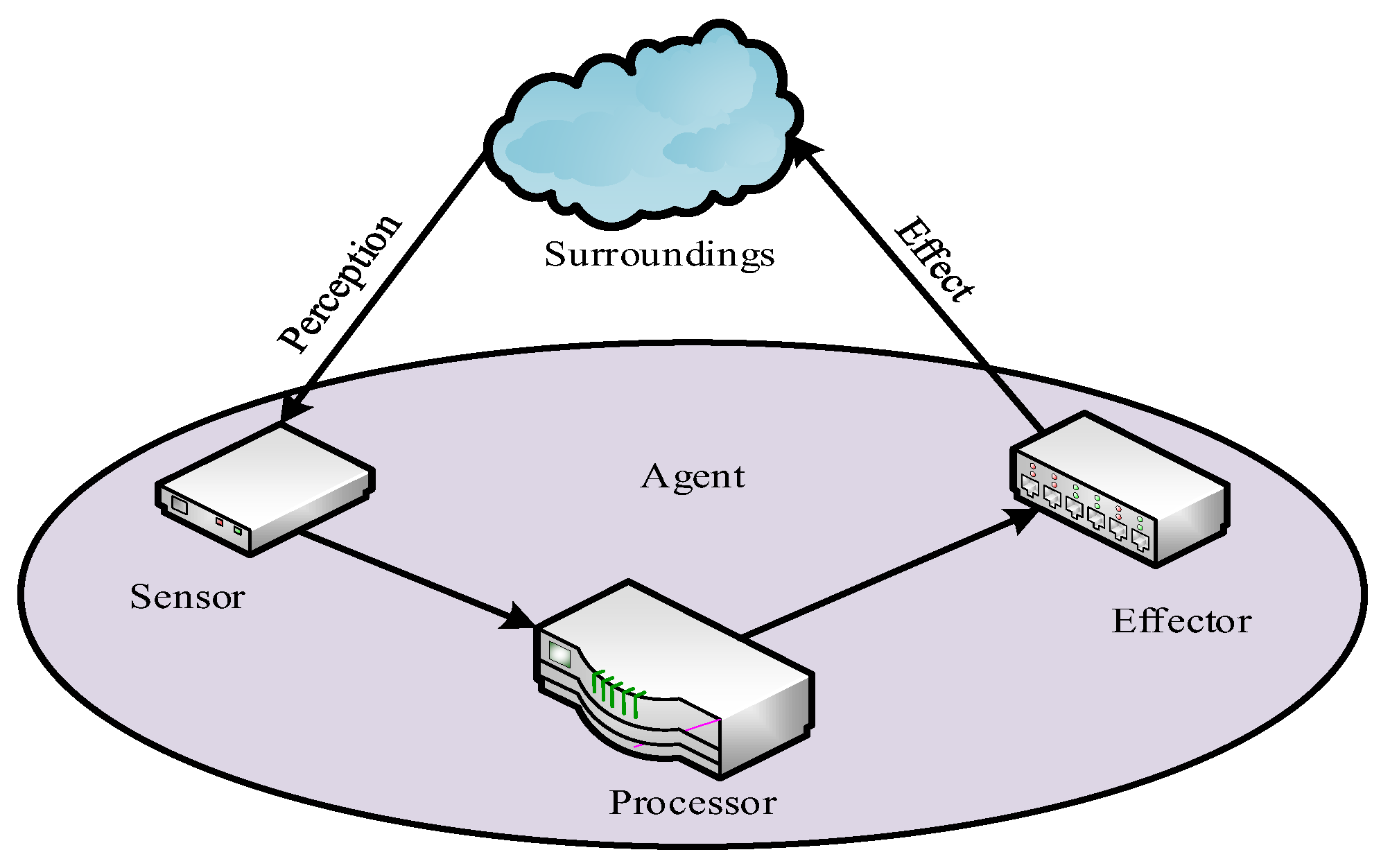
UAV cluster online mission planning is a task to be completed during the flight process of UAV, mainly including task allocation and path planning. This paper presented a distributed online task planning method for UAV cluster based on the agent. Under this method, the content of online task planning for each UAV agent includes individual task execution, state evaluation, cluster state prediction, and local task planning. In these planning contents, status assessment is not easy to understand. It refers to the assessment of task status according to task requirements, such as the risk level of the task, the time spent on the task, etc.
(2) Search rules and search algorithms
A. Search Rules
Search rules are the premise of UAV cluster search, in which target search rules and path selection rules are the most important at the decision-making point of UAV flight mission, that is, the direction of each UAV search path. The most common search rule is random search with infinite angles, which easily leads to repeated search and low efficiency. In order to improve the search efficiency, we must try to avoid repeated search. In addition, search rules can usually be arranged with search algorithm or target optimization algorithm. The path selection rule is used to select an optimal path from the starting point to the destination, which requires the support of the corresponding objective optimization algorithm, such as the multi-objective optimization algorithm applied in this paper. In unfamiliar flight environments, for relatively small targets, UAVs can only use a simple agent to complete the search task, but the agent must have a certain computing power. Through the interaction between these agents and the environment, a group system is finally formed to optimize the search path until the target location is found.
B. Multi UAV cooperative search algorithm based on coevolutionary genetic algorithm
This paper adopts the rolling optimization idea, that is, at time , limit each UAV to plan path forward. UAVs only execute the first step of the planned path. At time , they re-plan the path based on the new system state and environmental information. Use subpopulations to evolve the search path of UAVs respectively. If the UAV is located in cell at time , the result of path planning at time is path with a length of starting from .
(3) Cluster formation control
The control of UAV cluster is used not only to maintain the cluster shape, but also to transform and rotate the formation and avoid obstacles. UAV cluster formation control can be divided into centralized control and distributed control. This paper prefers distributed control. The reason is that distributed control requires less information and is simple to calculate with the advantages of high reliability, which is more suitable for controlling the formation of small UAV clusters.
4. Task Planning of UAV Based on Multi-Objective Optimization Algorithm
Combined with the multi-objective algorithm, this paper analyzed the modeling from three aspects: task allocation, route planning and planning evaluation.
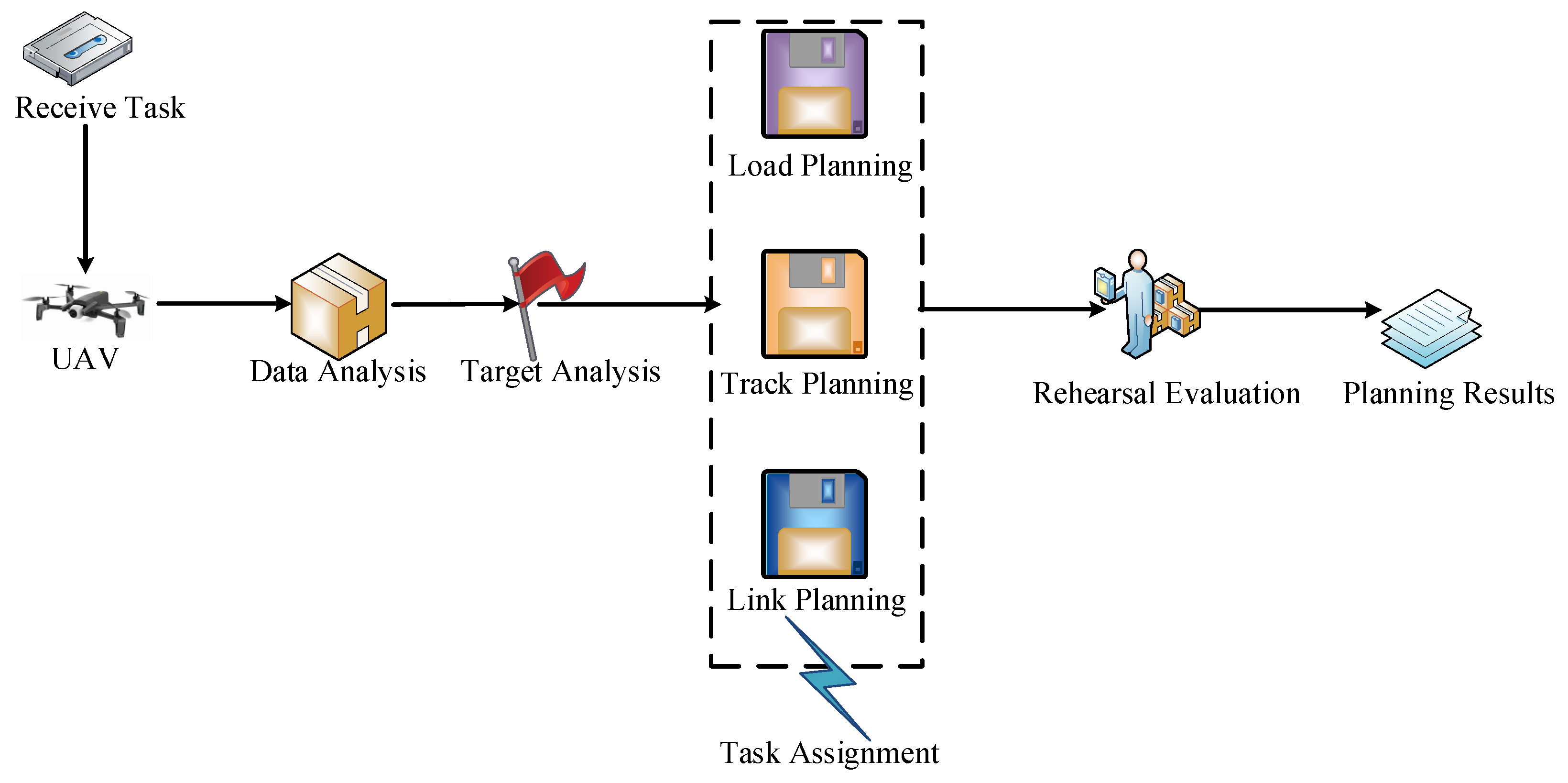
Figure 2 showed the specific process of UAV mission planning combined with multi-objective optimization algorithm. First, after receiving the task, the data are collated and analyzed, and the task target is analyzed according to the collated content; next, the load, track and link are planned as a whole through environment modeling; Finally, the planning result is output and sent to the terminal device.
(1) Task assignment
The task allocation problem of the clustered UAV system belongs to the basic combinatorial optimization problem. At the beginning of the model establishment, the model elements UAV and task are set up first. It is supposed that there are
tasks, and the task set of
UAVs is
; the UAV set is
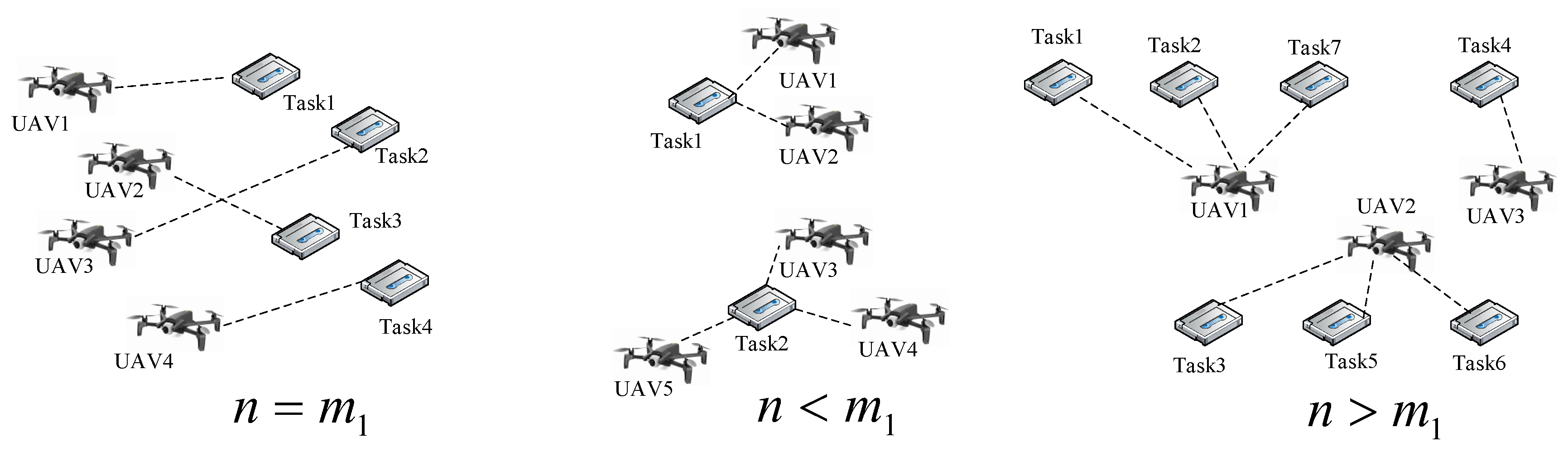
. As the task planning forms of rotary wing UAV and fixed wing UAV are basically similar, this paper takes the rotary wing UAV as an example to show pictures. The allocation model shown in
Figure 3 can be established based on whether the number of UAVs performing tasks
and the number of tasks
are the same in the system of
UAVs.
A.
is a single task performed by a single UAV, and its model is:
is a single task performed by multiple UAVs, and its model is:
is a multi-task performed by a single UAV, and its model is:
Based on the above three formulas, a unified mathematical distribution model can be further established:
Different allocation models have different cost matrices [
13]. The following is the cost matrix corresponding to the above models.
When it is
, the cost matrix of single task performed by a single UAV is:
In the formula, is a square matrix, and represents the cost of task completed by UAV .
When it is
, the cost matrix of single task performed by multiple UAVs is:
In the formula, is a square matrix, and represents the cost of task completed by UAV .
When it is
, the cost matrix of multiple tasks performed by a single UAV is:
Among them, represents the cost matrix between the UAV performing the task and the corresponding task, and represents the cost of task completed by UAV . represents the cost matrix between tasks. represents the cost of UAV from task to task .
In order to make the model clearer, the distance cost and the maximum flight time of the three models are obtained by Equations (8) and (9).
Among them, represents the flight distance of to complete . is the speed of . represents the distance between and .
The goal of task allocation is to minimize the global objective function, which can be expressed as follows:
Among them,
can be obtained by Equation (11).
(2) Track planning
Track planning is used to find the optimal track composed of an ordered sequence from the starting point to the target point when the specific boundary conditions and performance indicators in the planning space are fully considered. Its objective function can be expressed as:
Among them, represents the decision variable and represents the constraint set; represents the objective function.
Smoothness refers to whether the UAV can fly smoothly along the planned track. The track generated by conventional algorithm is basically formed by connecting the track points into a straight line, which can lead to discontinuity [
14]. If this problem needs to be solved, the track has to be smoothed. The common processing methods include cubic spline interpolation, B-spline curve and Bezier curve.
Bezier curve is a polynomial curve fitted by a few control nodes [
15]. If there are
control points with coordinate value of
, the parameter equation of each point on the
-order Bezier curve can be expressed as:
Among them, , and . refers to the -times Bezier curves.
The
-order B-spline of
control nodes
,
,...,
in three-dimensional space is as follows:
Among them,
and
are
-times B-spline basis functions. When it is
, then
; when
, then
; when
, then
, which can be expressed as:
nodes are taken in the interval . If can be expressed as , in each interval , , and are continuous in the interval and meet the following conditions.
The
interpolation conditions are:
is continuous at the interpolation point:
At the interpolation point, the first and second derivatives of b are continuous:
Since there are
equations from Equation (17) to Equation (20) and
unknowns to be solved, the first or second derivative value 0 of the two endpoints is usually added, which is:
(3) Evaluation of route planning
After the optimal track is obtained through model construction and algorithm operation, the track quality must be evaluated before it can be put to use. Generally, the constraint index function is constructed according to the track quality index, and then the track quality is evaluated again according to the value of the comprehensive constraint index function [
16].
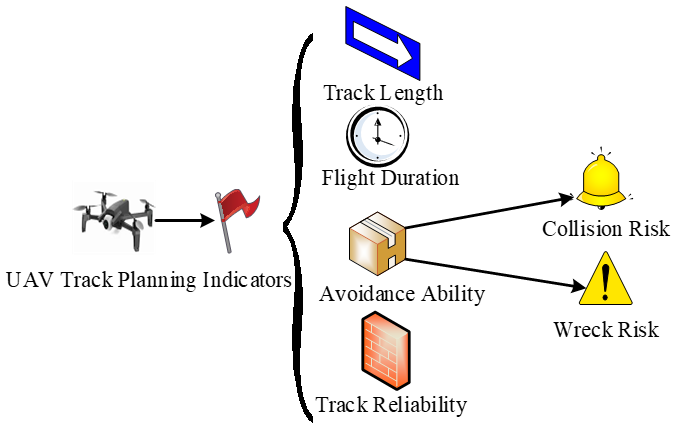
Figure 4 is the corresponding UAV track planning evaluation index chart, including flight time, track length, threat avoidance capability and track reliability. Track quality can be quantified using comprehensive constraint index function, which can be expressed as:
Among them, is the comprehensive constraint index function, and is the flight time, which is also the time required for the UAV to complete the task after the flight route planning.
Flight time refers to the time from the starting point to the destination. The flight time of UAV on the planned route shall be less than the set value because the smaller the value, the less fuel the UAV consumes and the higher the track quality.
The track length refers to the length from the starting point to the destination of the UAV. The planned route length shall be less than the maximum allowed flight. The shorter the search route length is, the less fuel the UAV consumes in flight, which can reduce the probability of encountering threats and improve the track quality.
Threat avoidance capability refers to the ability of UAVs to avoid threats such as mountains, hills and houses. The stronger the ability of UAV to avoid threats, the stronger the search track, which can reduce the possibility of re-planning and improve the track quality [
17].
Track reliability refers to the possibility of safe flight plan route of UAV under space and time constraints. The higher the reliability of the route, the less likely the UAV is to be destroyed when confronted with threats and the higher the track quality.
5. Experimental Results of Task Planning Method Combined with Multi-Objective Optimization Algorithm
In order to verify the effectiveness of the new UAV mission planning method, the flight mission was tested in the MATLAB 2016b simulation platform with an area of 500 m × 500 m. First, the distance, time and task completion degree of a single UAV were tested in a fixed task. Mission planning methods are divided into traditional methods and new methods. Threat factors are set in the flight area and the type of UAV is a consumer class 4-axis UAV. The normal flight speed of the UAV is 60 km/h. The test results are shown in
Table 1.
From the data in
Table 1, it can be concluded that under the two task planning methods, there is a significant gap in the distance, time and task completion of the UAV. Under the same task, the distance of the traditional method is nearly 40 m higher than that of the new method, and it takes more than 2 s compared to the new method. However, the task completion under the traditional method is not as high as that under the new method. These three types of data clearly show that the task completion efficiency under the new method is better.
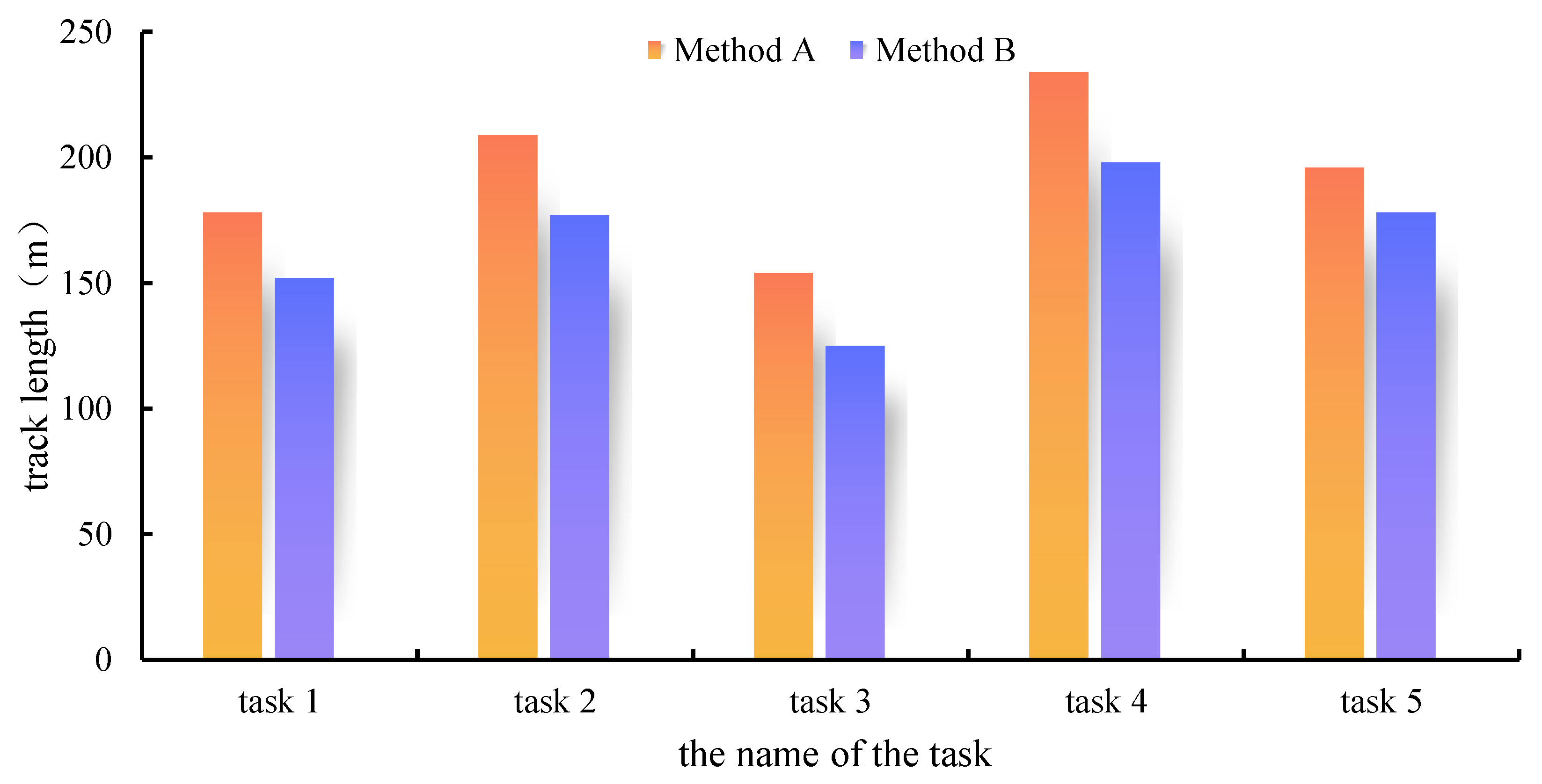
Track planning is mentioned in the analysis of UAV mission planning methods, which is the core of mission execution. The selection of an optimal track plays a decisive role in the completion of the UAV mission. The shorter the length of the optimal track, the higher the flight efficiency of the UAV. The traditional method is defined as Method A, and the method in this paper is defined as Method B. The optimal path planning length of five flight missions under the two methods is tested, and the test results are shown in
Figure 5.
It is easy to see from the histogram in
Figure 5 that the optimal path planning length under method B is shorter than that under method A in the five flight missions. Among them, the planning length gap of task 5 is the smallest, and that of task 4 is the largest. When the track length of Task 4 is planned, the length planned by Method A exceeds 200 m, and the length planned by Method B is still below 200 m. These results show that the optimal track planned in this paper is shorter than that planned by traditional methods, and it can provide the shortest and optimal path for UAV mission execution.
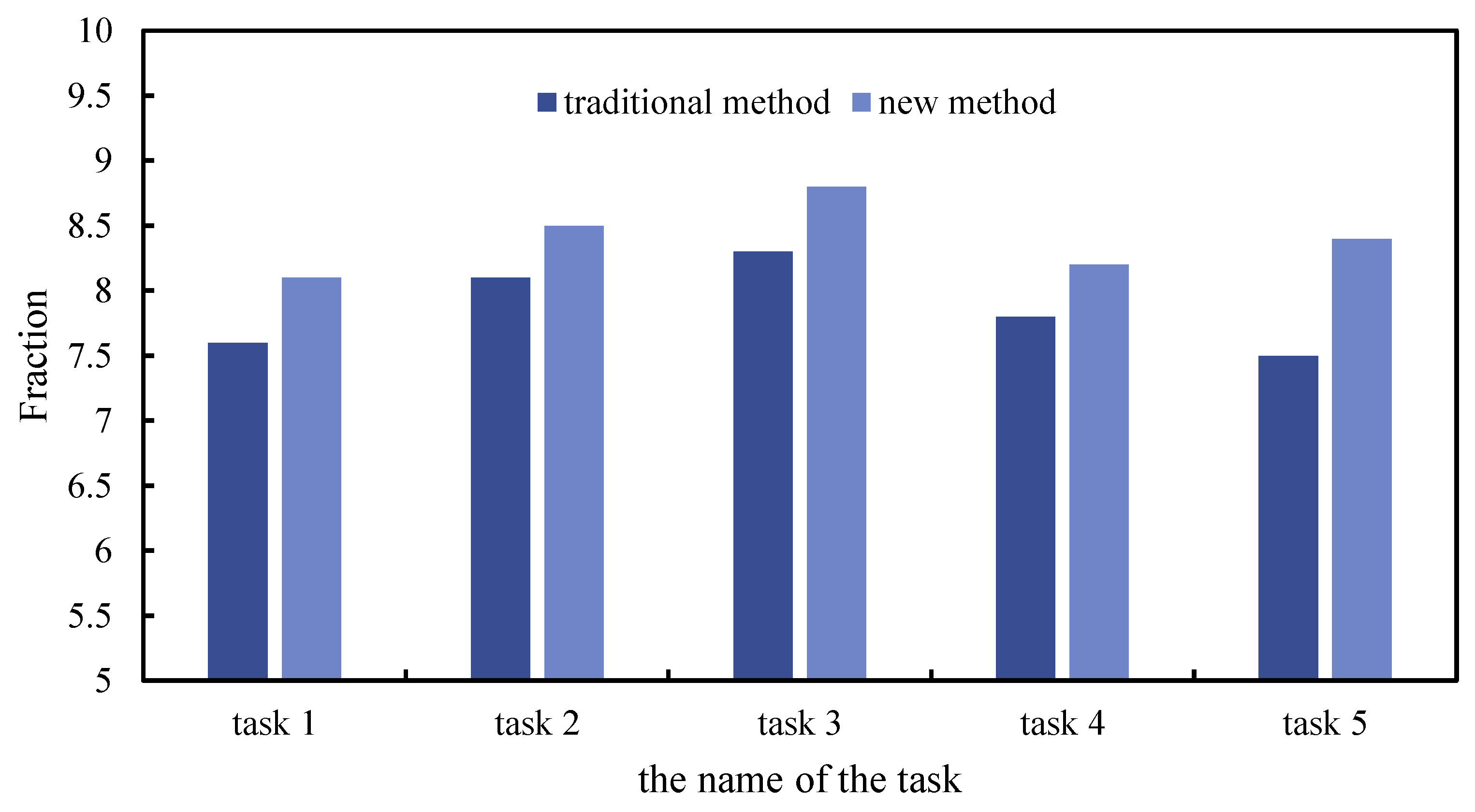
Generally, before performing UAV tasks, the UAV operators need to check and evaluate the route planning.
Figure 6 shows the ratings given by operators for the route planning under the two methods, the flight missions of which are still the five missions mentioned above. The traditional method refers to the route planning method without specific optimization algorithm.
It can be seen from
Figure 6 that the UAV operators are very strict in their assessment and scoring of the route planning, and the scores are basically below 9 points. The score of route planning under the new method is higher than that under the traditional method in the five missions. In the route planning of Task 3, both methods get the highest score: the traditional method is more than 8 points, while the new method is more than 8.5 points. These scoring results can reflect that the quality of route planning under the new method is better than that of the traditional method.
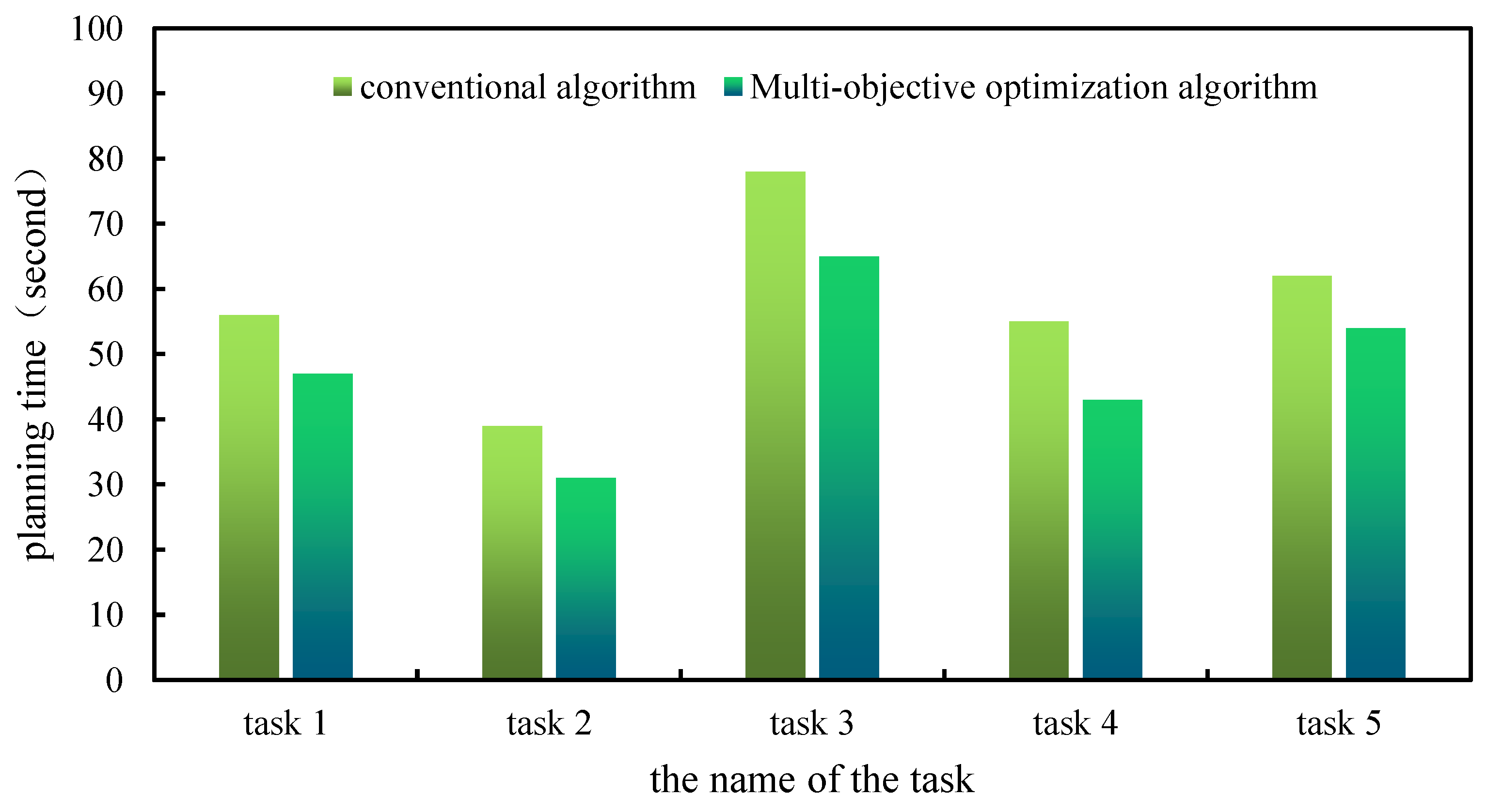
In this paper, multi-objective optimization algorithm is applied to UAV mission planning to improve the efficiency of mission planning. For the specific effect, the time of UAV task planning is tested under the two algorithms. The specific flight tasks are the five tasks mentioned above, and the test results are shown in
Figure 7.
It can be seen that in the five tasks, the time spent for UAV task planning under the two algorithms is very different. As far as the planning of task 3 is concerned, it takes a lot of time under both algorithms. The conventional algorithm takes more than 70 s, while the multi-objective optimization algorithm takes more than 60 s. In general, in each task, the task planning under the multi-objective optimization algorithm takes less time than the conventional algorithm, which also shows that the task planning method combined with the multi-objective optimization algorithm is more efficient.
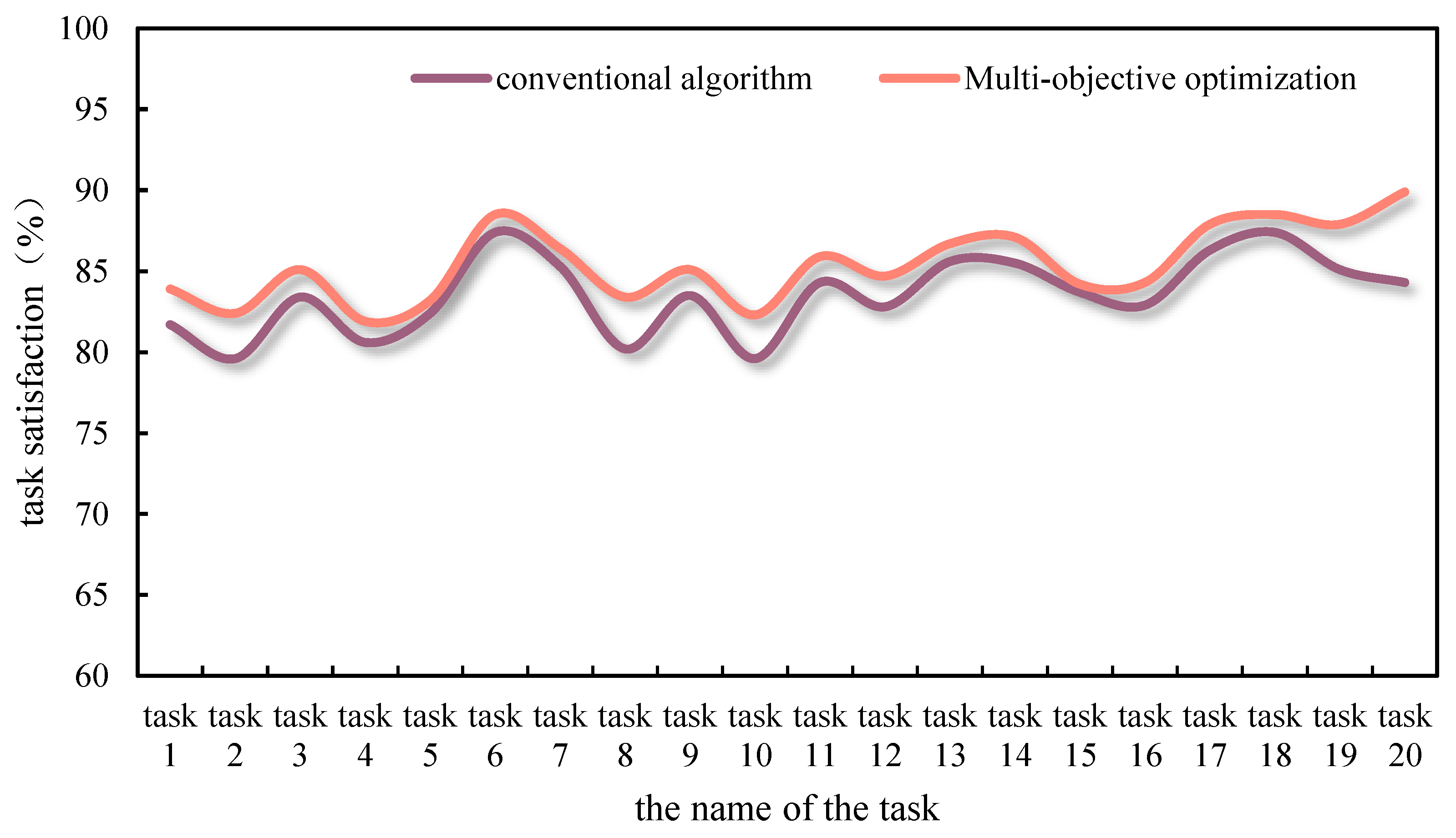
After the flight mission, there is a satisfaction survey of completion. In this paper, 20 conventional tasks are selected to be executed by UAVs in turn, and their satisfaction with the completion of tasks is investigated. Task planning routes include those under conventional algorithms and those under multi-objective optimization algorithms. The results of the survey are shown in
Figure 8.
It can be seen that the satisfaction of each task is different based on whether the task planning route is conducted under the conventional algorithm or the multi-objective optimization algorithm. Generally, it shows a fluctuating trend, because each task has a different number of tasks. In contrast, the satisfaction of multi-objective optimization algorithm in each task is higher than that of conventional algorithm, and the overall satisfaction is 2.26% higher.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}