
Flux Intensifying Feature of Permanent Magnet Assisted Synchronous Reluctance Motor with High Torque Density




Abstract
:1. Introduction
2. Investigated Models and Concept of Torque Production and Improvement
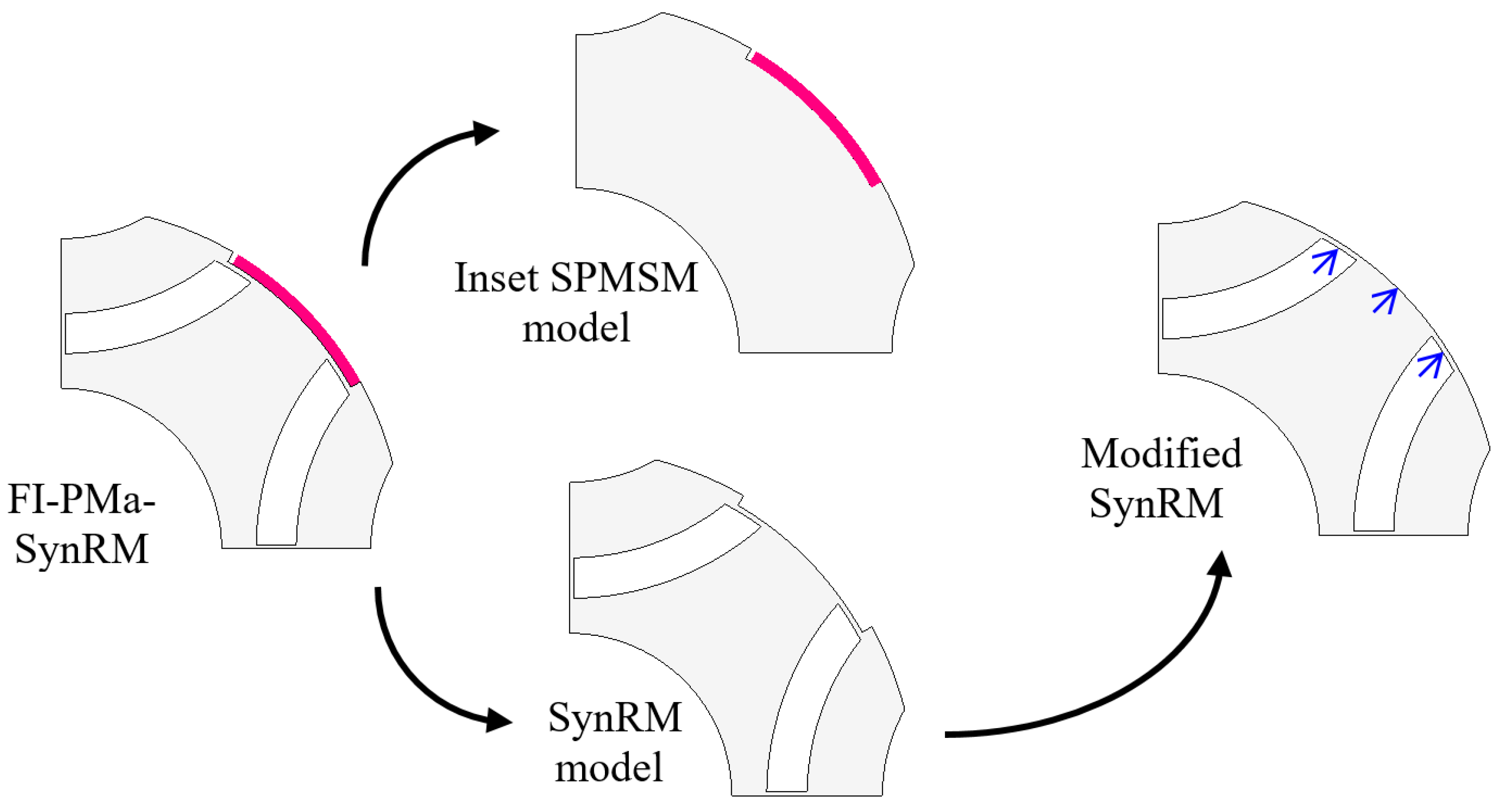
2.1. Investigated Models
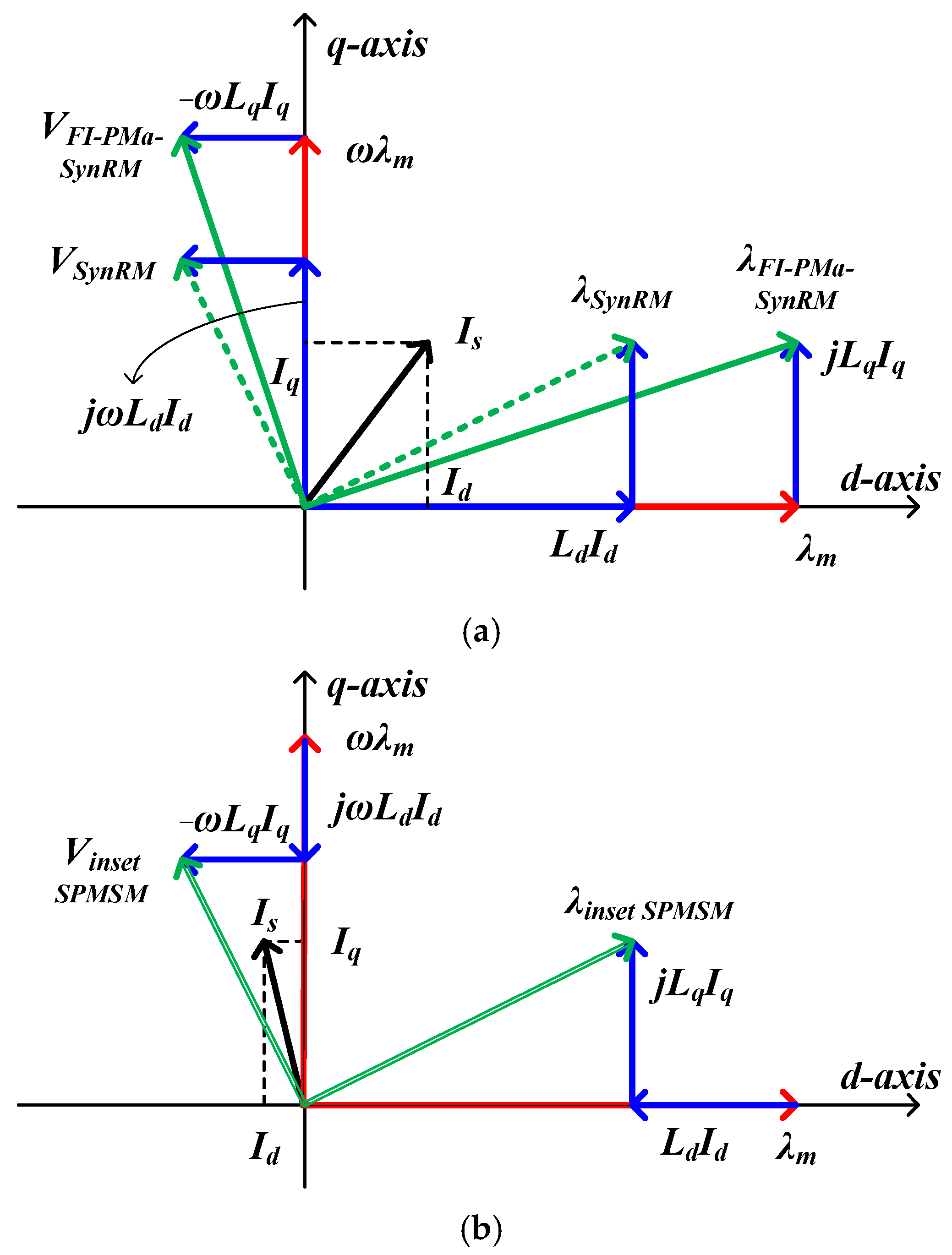
2.2. Concept of Torque Production and Improvement
3. Difference of Performance and Effect of Permanent Magnet and Flux Barriers
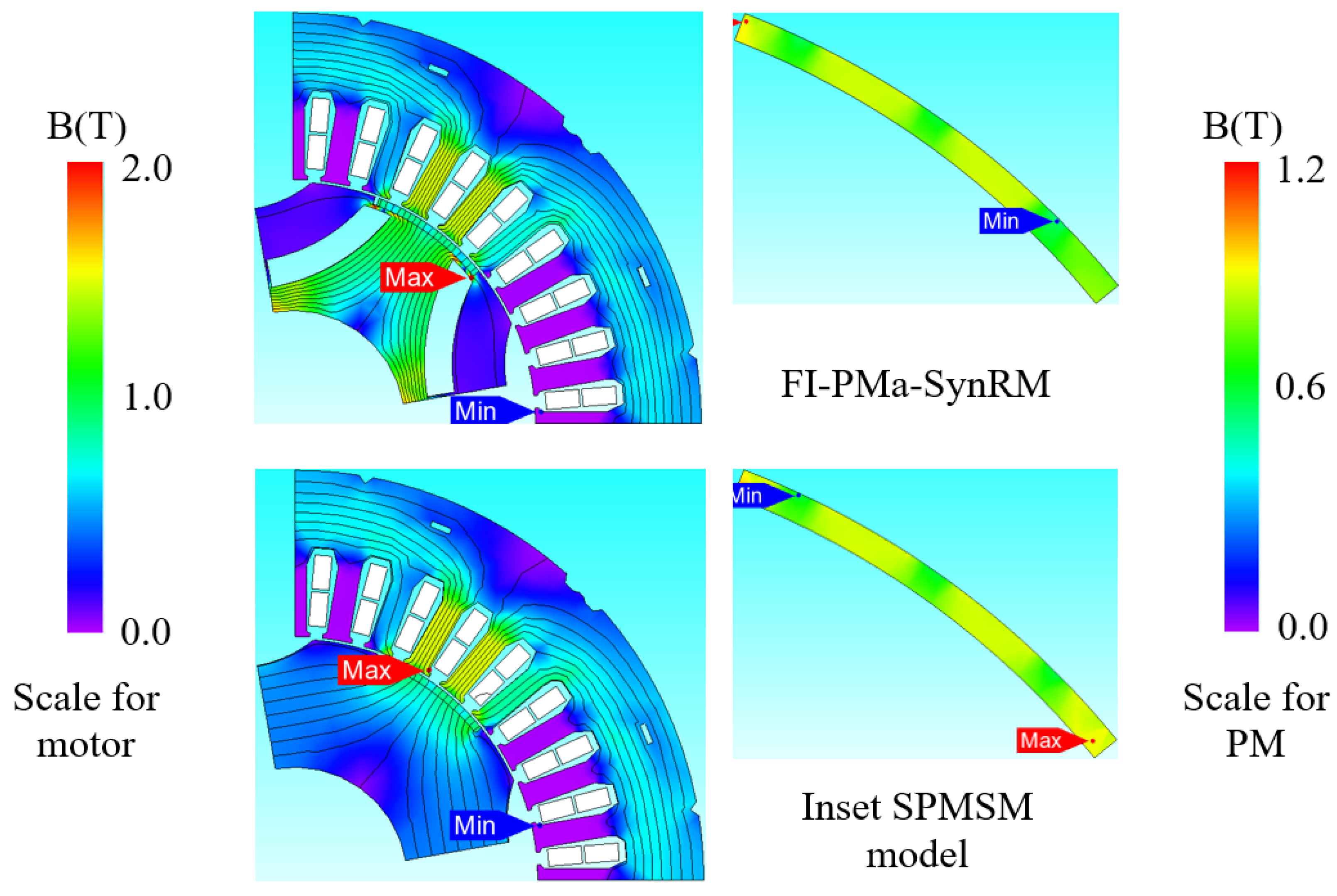
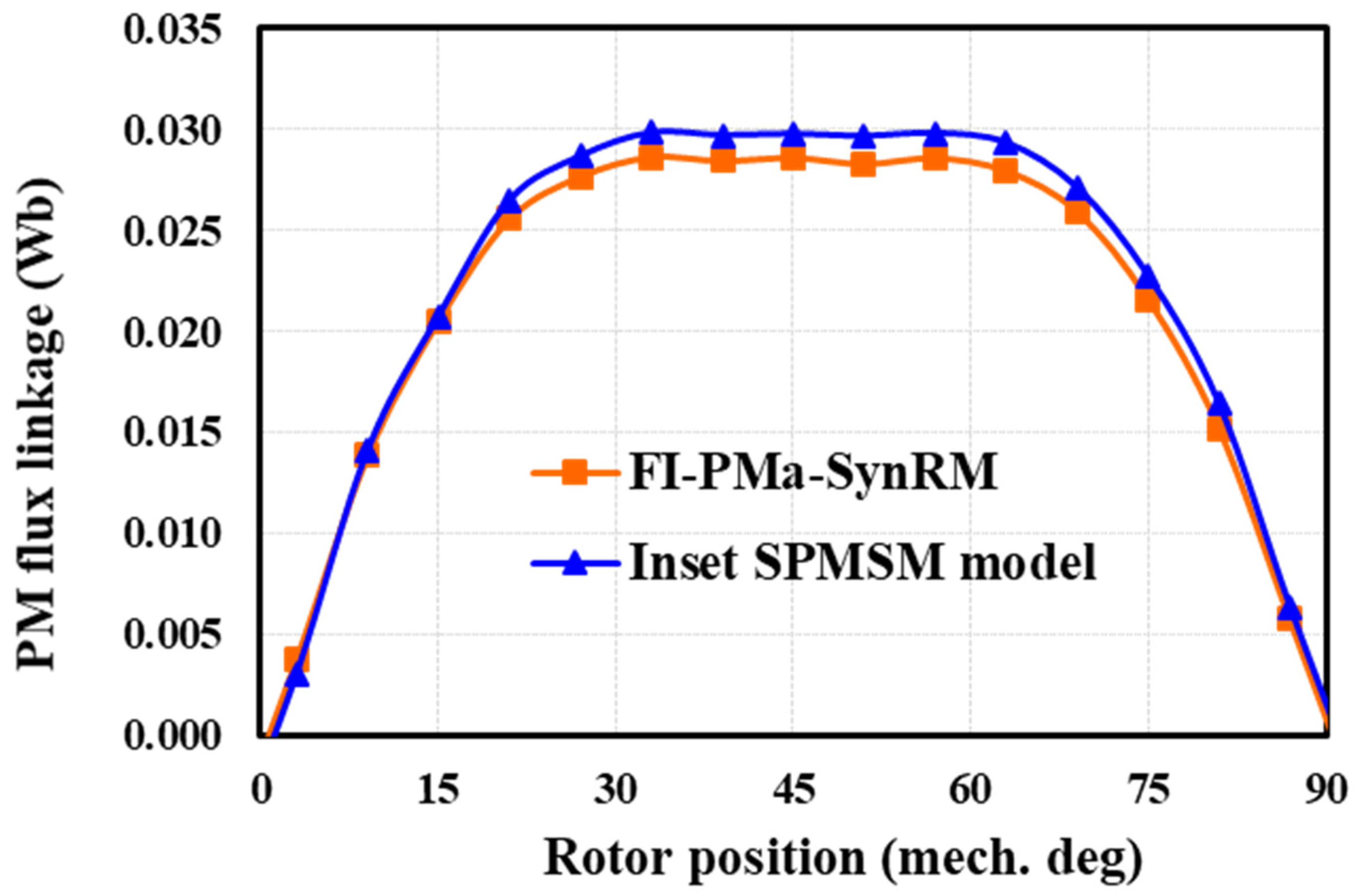
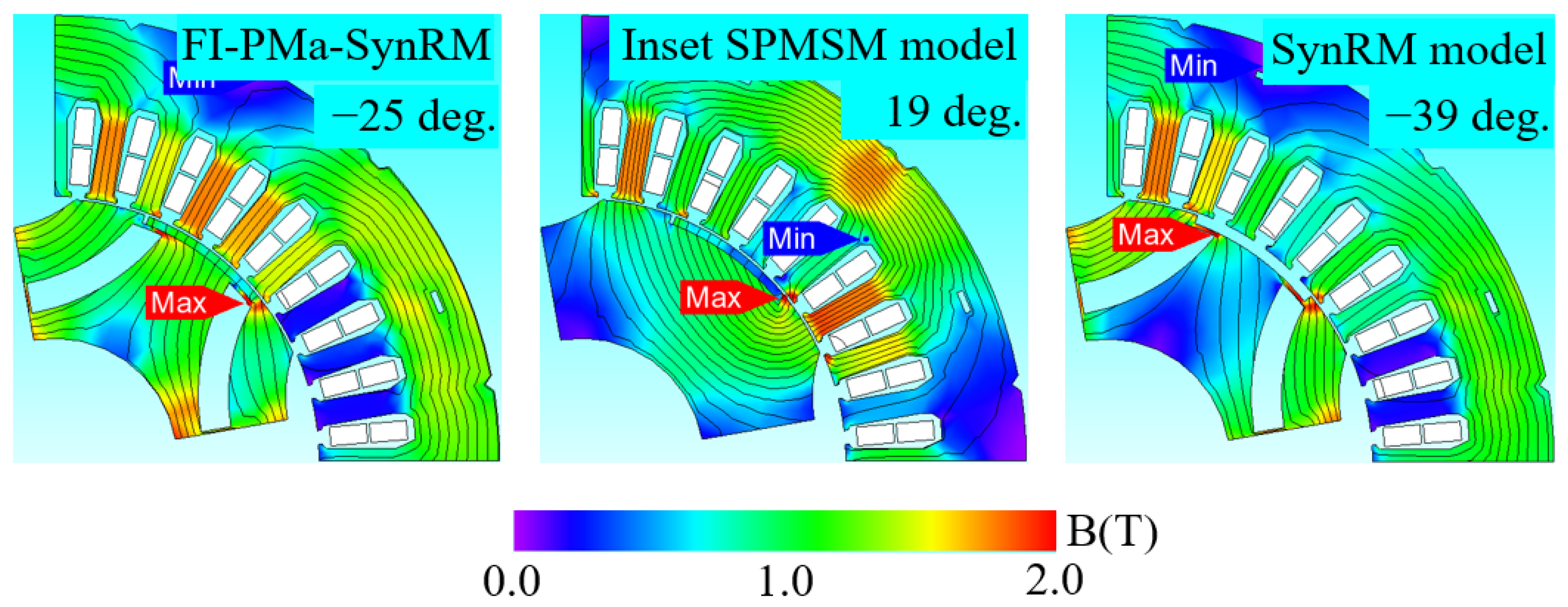
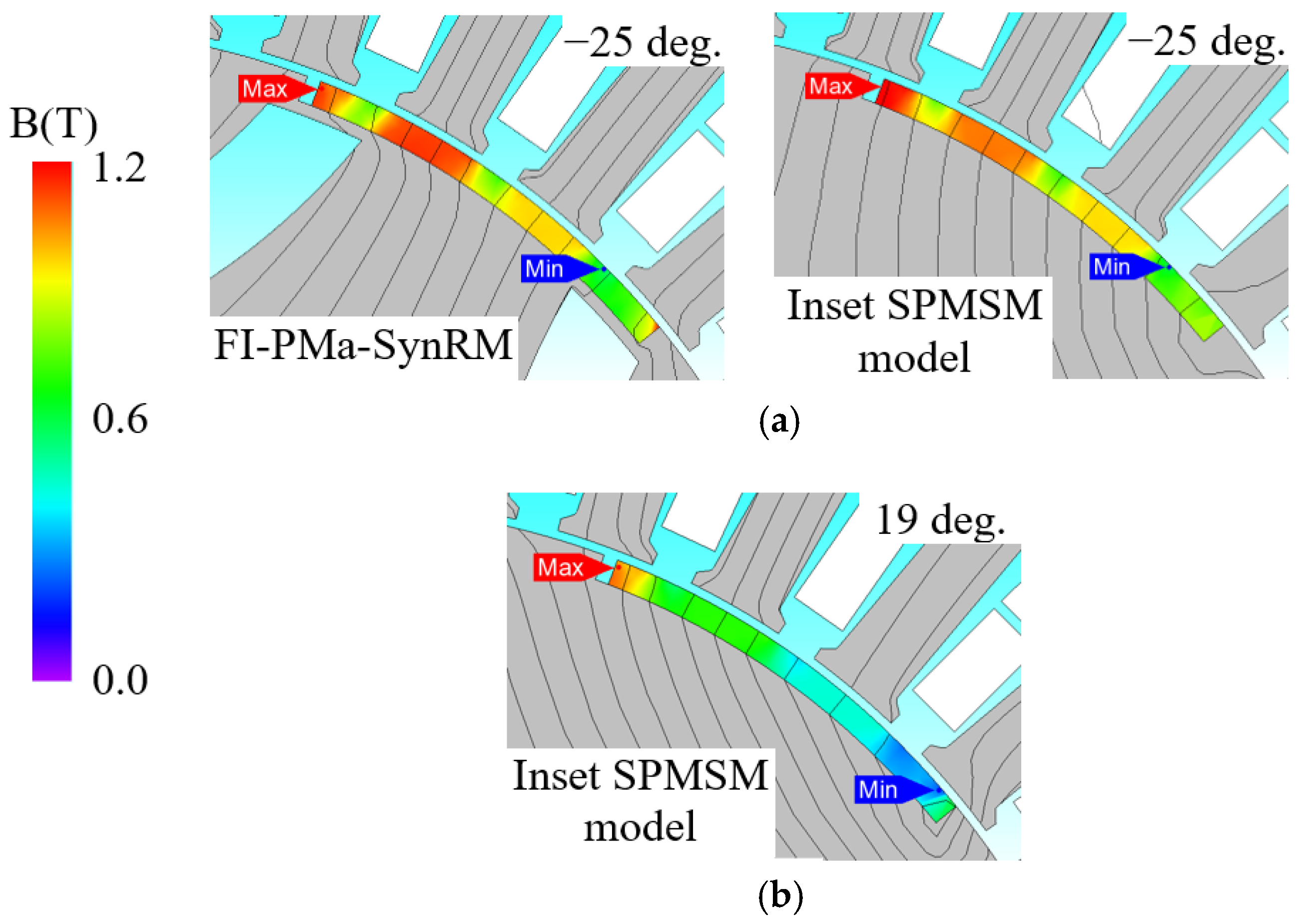
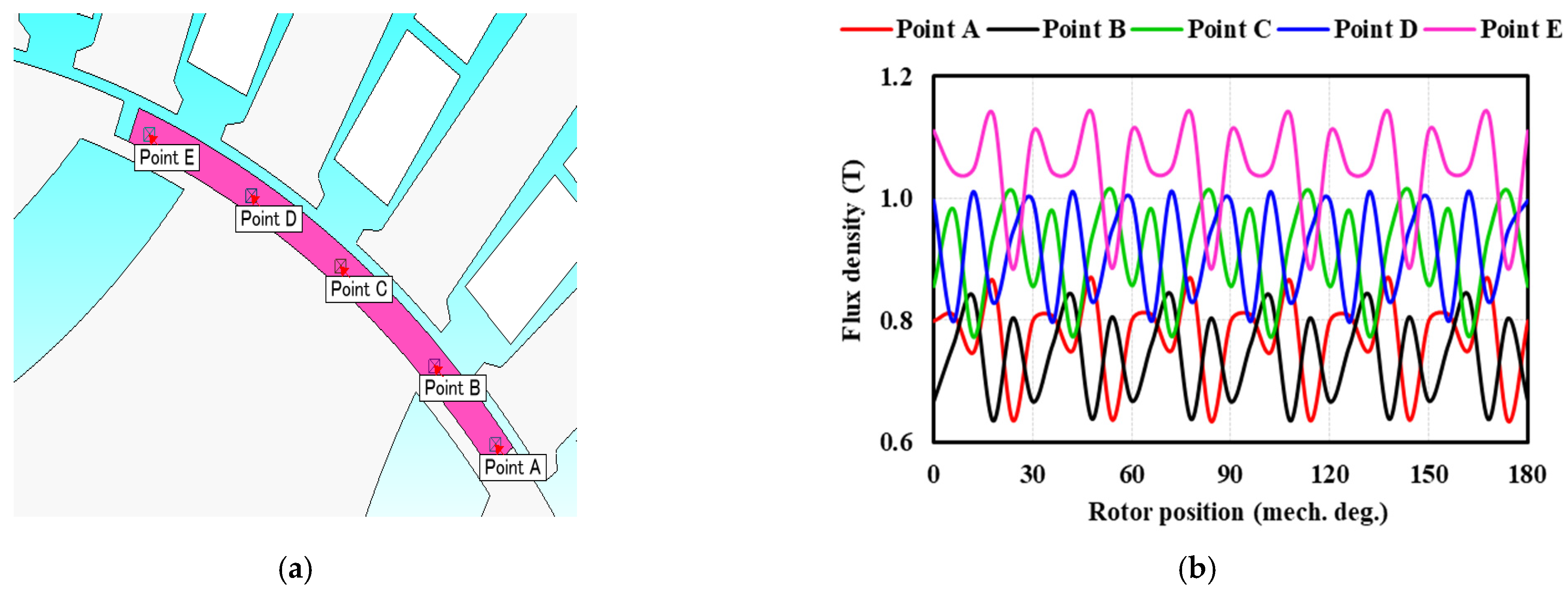
3.1. Magnetic Field
3.2. Inductance Variation
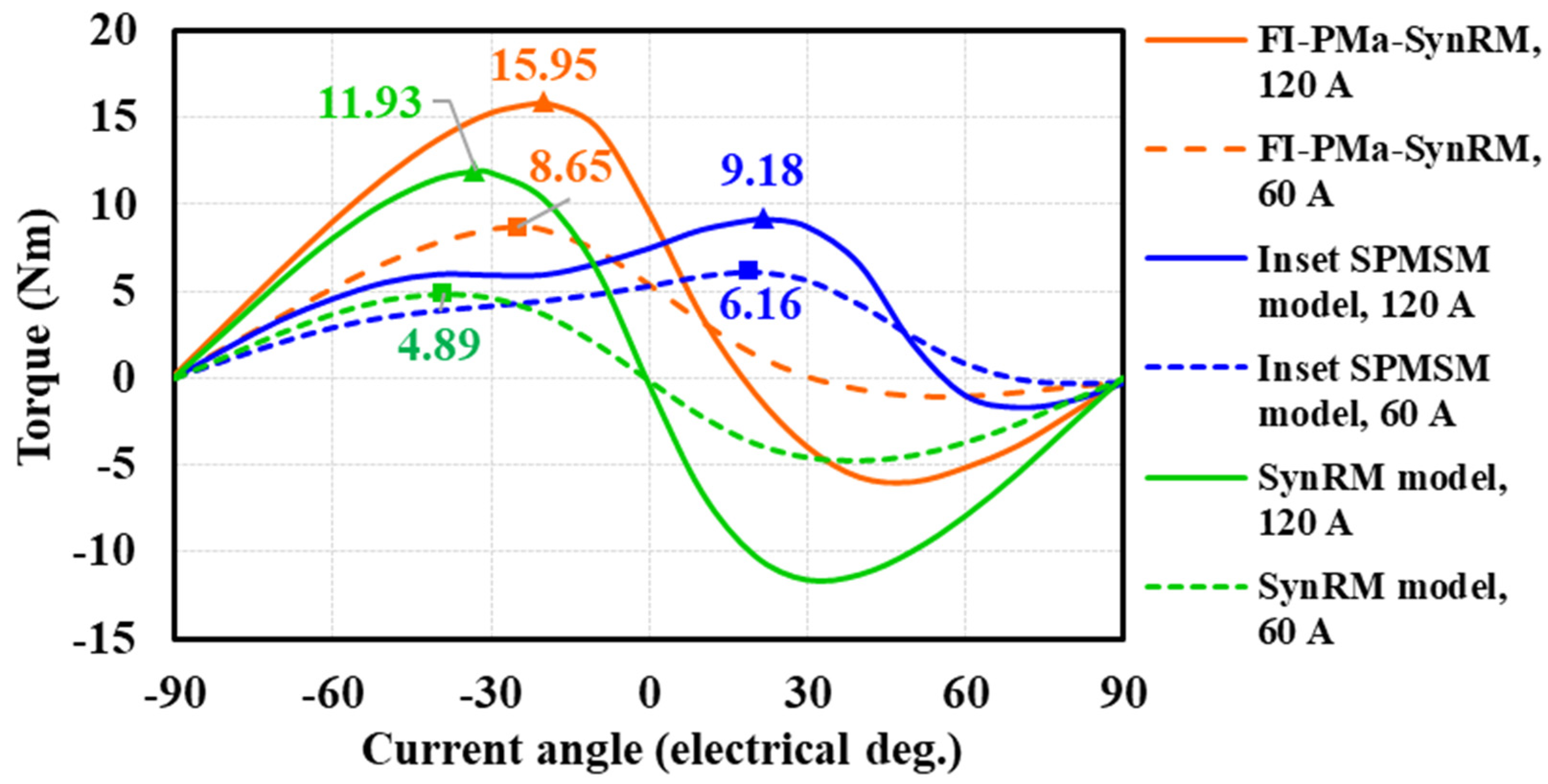
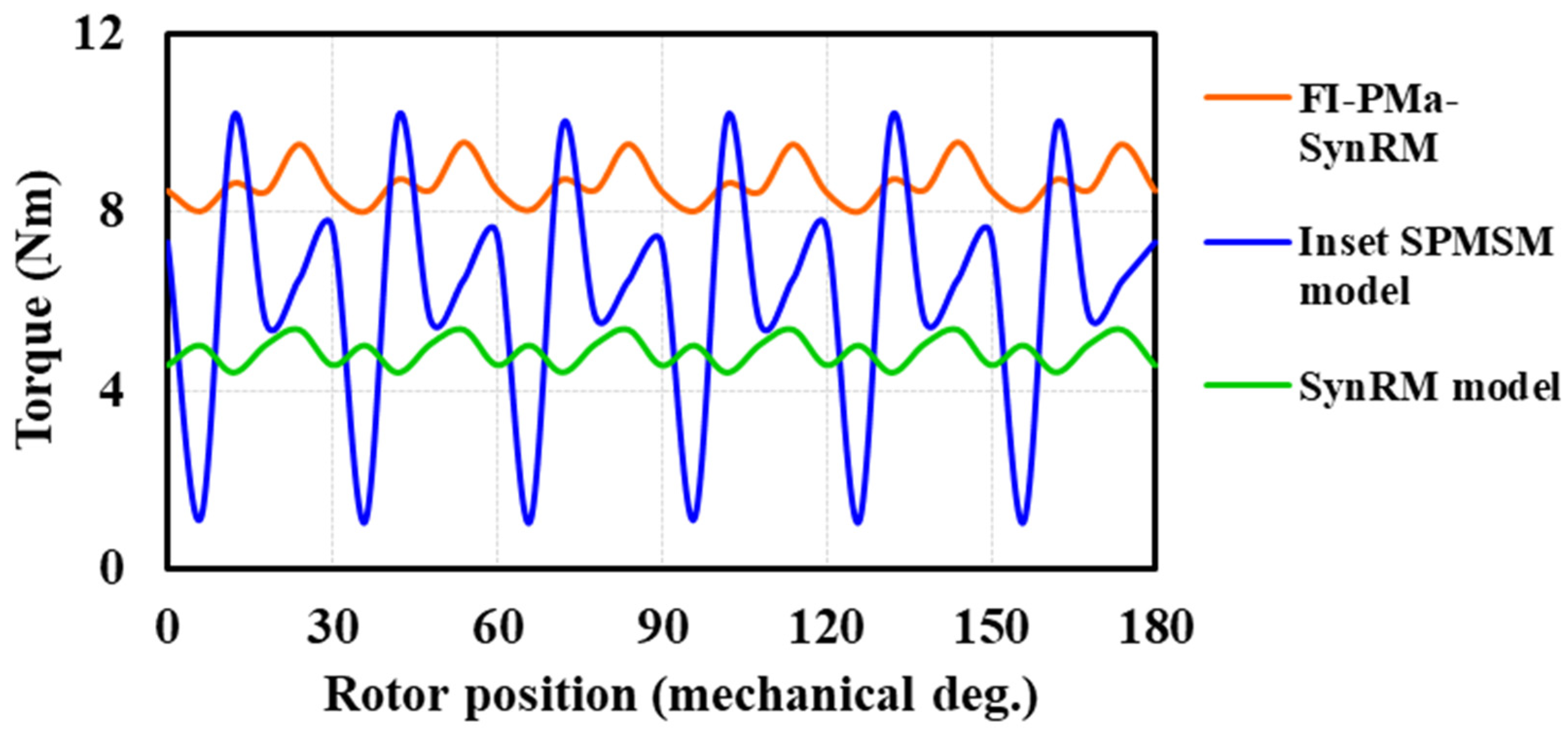
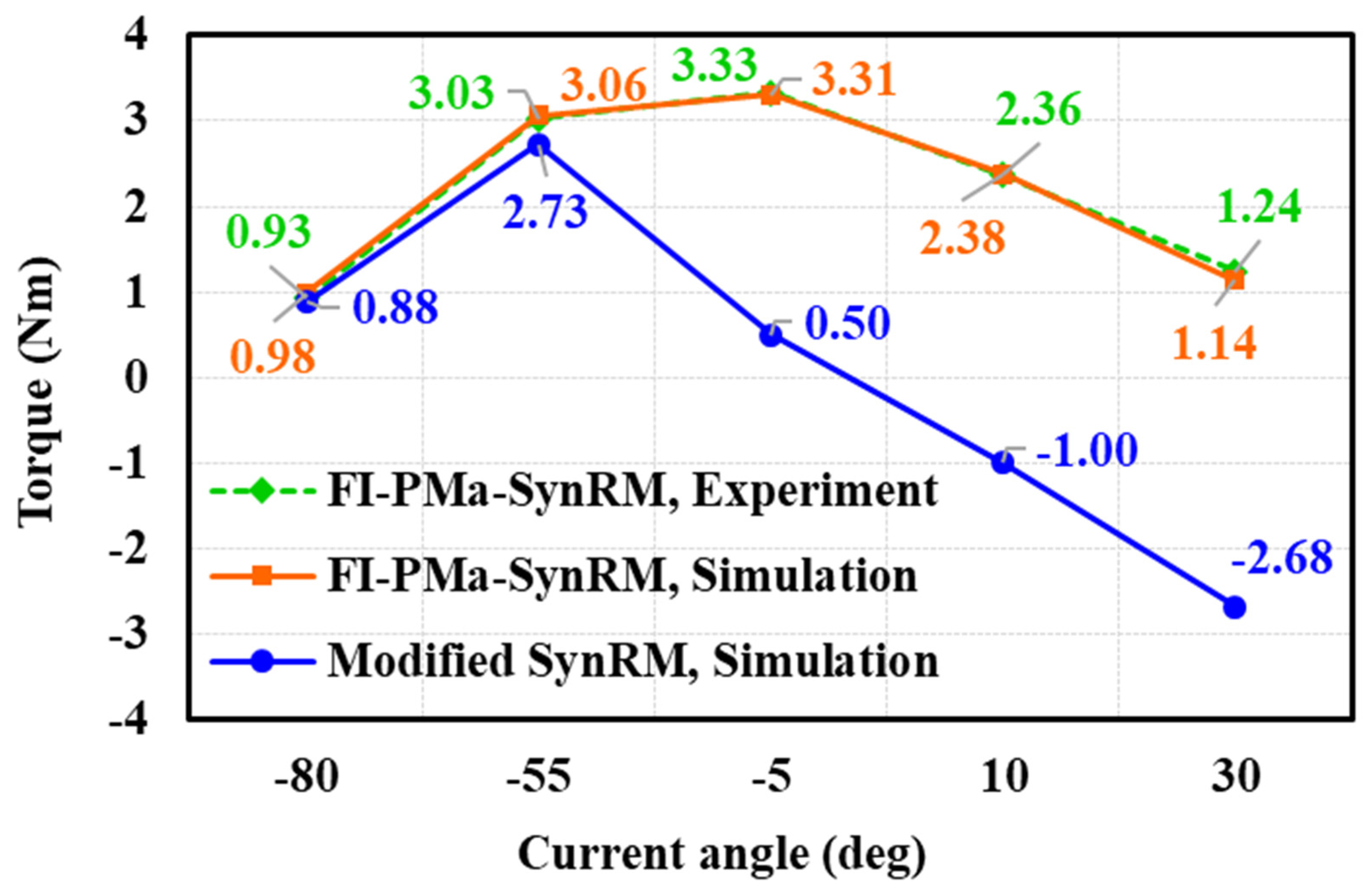
3.3. Torque Variation
3.4. Brief Summary
- -
- The appearance of FBs in the developed FI-PMa-SynRM helps PM be better secured and leads to the reversal of inductance properties (FI-PMa-SynRM vs Inset SPMSM model).
- -
- The appearance of PM in the developed FI-PMa-SynRM leads to an enhancement of the flux density in the cores and the significant change of d-axis inductance (FI-PMa-SynRM vs SynRM model).
- -
- The coordination of PM and FBs in the FI-PMa-SynRM helps it enhance the torque production compared to those of its counterparts with a small added PM amount.
4. Further Analysis of Developed Motor
4.1. Partial Demagnetization
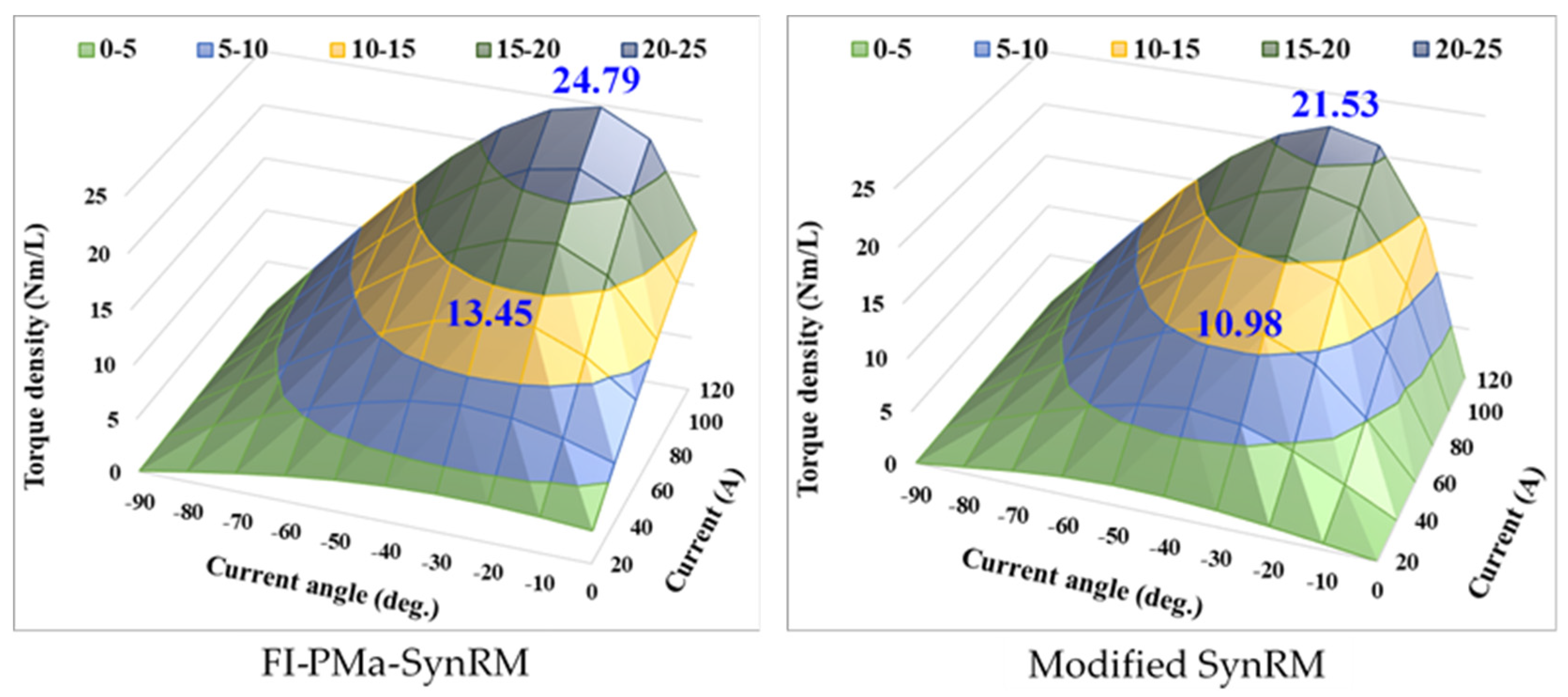
4.2. Torque Density Capability
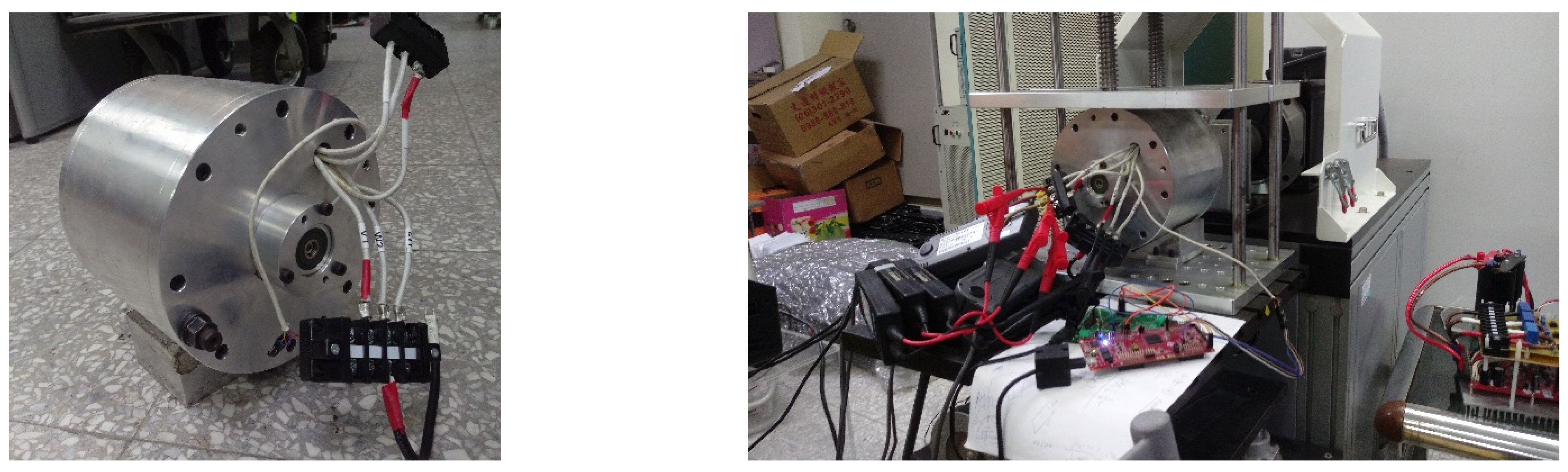
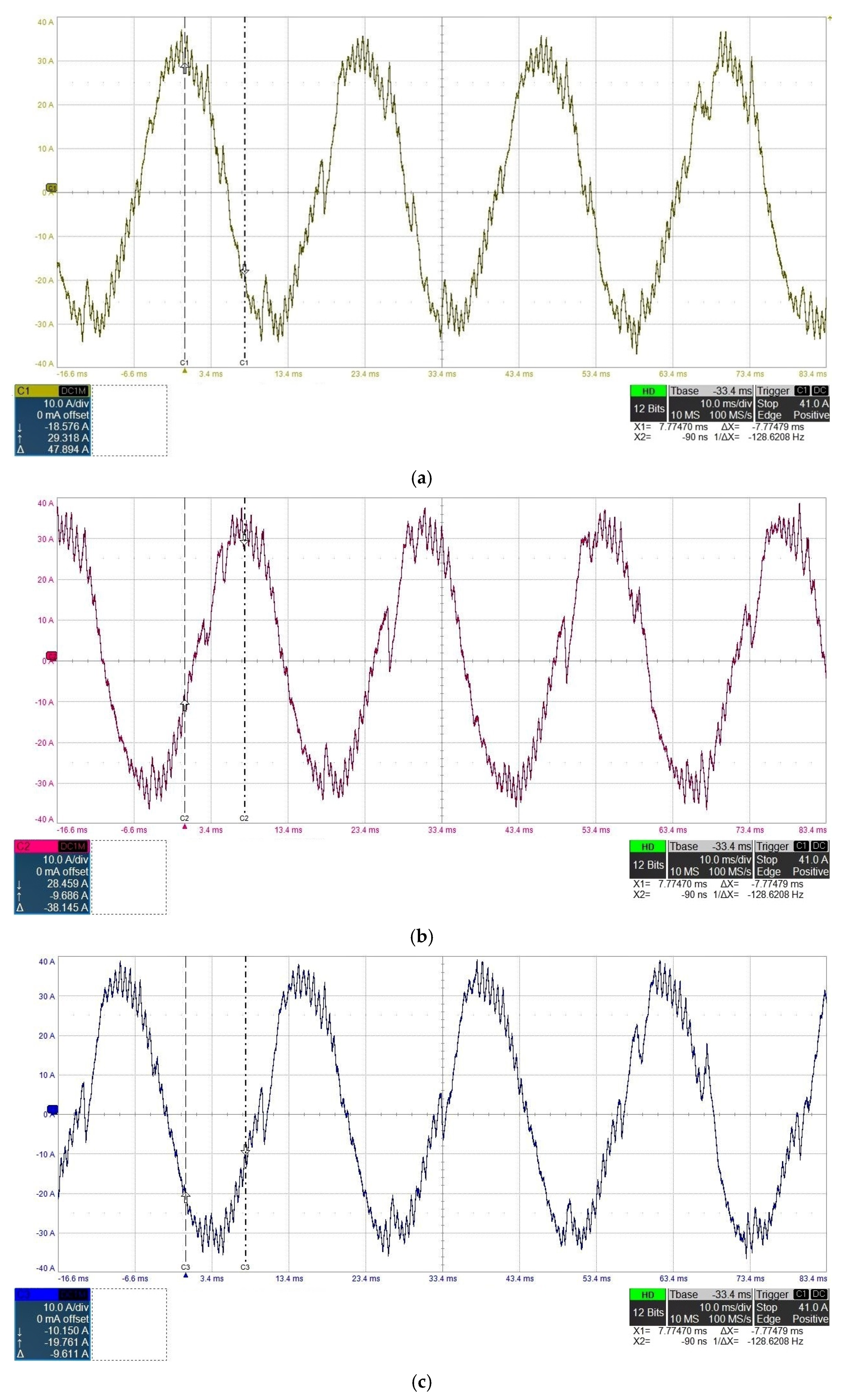
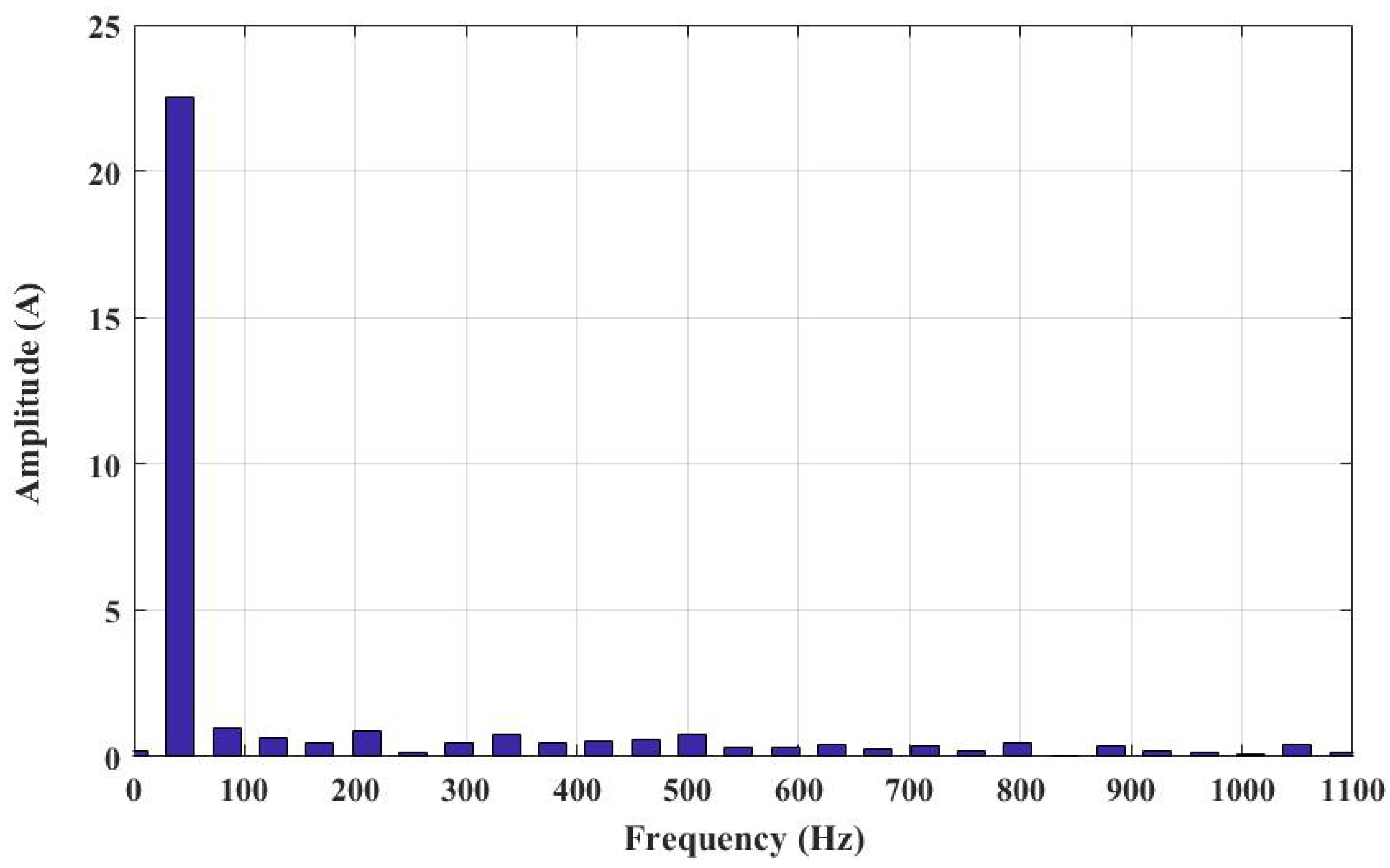
5. Experiment Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature and Abbreviations
| d | Direct axis |
| Id | D-axis current |
| Iq | Q-axis current |
| Ld | D-axis stator inductance |
| Lq | Q-axis stator inductance |
| p | Number of pole pairs |
| q | Quadrature axis |
| T | Torque |
| VFI-PMa-SynRM | Voltage of FI-PMa-SynRM |
| Vinset SPMSM | Voltage of inset SPMSM |
| VSynRM | Voltage of SynRM |
| λFI-PMa-SynRM | Flux linkage of FI-PMa-SynRM |
| λinset SPMSM | Flux linkage of inset SPMSM |
| λm | PM flux linkage |
| λSynRM | Flux linkage of SynRM |
| ω | Electric angular speed |
| EV | Electric vehicle |
| FB | Flux barrier |
| FEM | Finite element method |
| FI | Flux intensifying |
| FI-PMa-SynRM | Flux intensifying permanent magnet assisted synchronous reluctance motor |
| FI-PMSM | Flux intensifying permanent magnet synchronous motor |
| FW | Flux weakening/weakened |
| IPMSM | Interior permanent magnet synchronous motor |
| MTPA | Maximum torque per ampere |
| PM | Permanent magnet |
| PMa-SynRM | Permanent magnet assisted synchronous reluctance motor |
| PMSM | Permanent magnet synchronous motor |
| SPMSM | Surface permanent magnet synchronous motor |
| SynRM | Synchronous reluctance motor |
| THD | Total harmonic distortion |
Appendix A. Brief Information of Motor Models

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Volumetric Torque Density (Nm/L) | PM-to-Motor Volume Ratio (%) | Peak Current Density (A/mm2) | Anti-Demagnetization Ability | Prototype |
|---|---|---|---|---|---|
| FI-PMa-SynRM | 24.79 | 0.72 | 15.35 | Validated | Done |
| Model in [6] | 63.79 | 4.22 | 26.87 | Validated | Not yet |
| Model in [7] | 52.82 | N/A | 25.1 | N/A | Done |
| Model in [10] | 14.91 | 4.32 | N/A | Validated | Done |
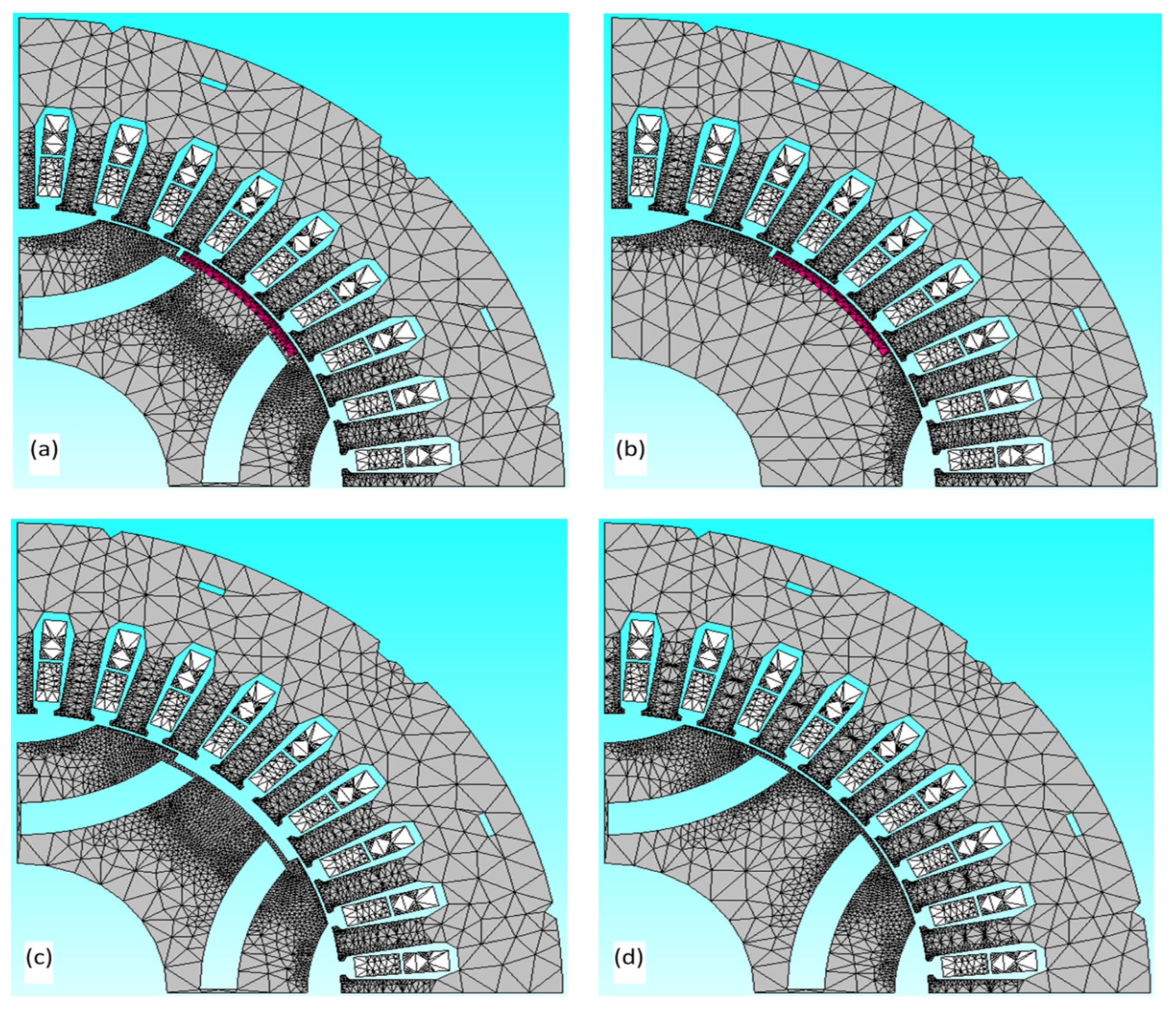
Appendix B. Finite Element Mesh Information
| Motor Models | Number of Elements | Number of Nodes |
|---|---|---|
| FI-PMa-SynRM | 12,467 | 6712 |
| Inset SPMSM | 10,147 | 5553 |
| SynRM | 12,615 | 6786 |
| Modified SynRM | 11,845 | 6396 |

References
- Kim, K.-C.; Lee, J.; Kim, H.J.; Koo, D.-H. Multiobjective Optimal Design for Interior Permanent Magnet Synchronous Motor. IEEE Trans. Magn. 2009, 45, 1780–1783. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, W.; McLoone, S.; Morrow, J. Design and Flux-Weakening Control of an Interior Permanent Magnet Synchronous Motor for Electric Vehicles. IEEE Trans. Appl. Supercond. 2016, 26, 0606906. [Google Scholar] [CrossRef] [Green Version]
- Bianchi, N.; Bolognani, S.; Carraro, E.; Castiello, M.; Fornasiero, E. Electric Vehicle Traction Based on Synchronous Reluctance Motors. IEEE Trans. Ind. Appl. 2016, 52, 4762–4769. [Google Scholar] [CrossRef]
- Son, J.-C.; Ahn, J.-M.; Lim, J.; Lim, D.-K. Optimal Design of PMa-SynRM for Electric Vehicles Exploiting Adaptive-Sampling Kriging Algorithm. IEEE Access 2021, 9, 41174–41183. [Google Scholar] [CrossRef]
- Kim, M.-J.; Cho, S.-Y.; Lee, K.-D.; Lee, J.-J.; Han, J.-H.; Jeong, T.-C.; Kim, W.-H.; Koo, D.-H.; Lee, J. Torque Density Elevation in Concentrated Winding Interior PM Synchronous Motor With Minimized Magnet Volume. IEEE Trans. Magn. 2013, 49, 3334–3337. [Google Scholar] [CrossRef]
- Du, Z.S.; Lipo, T.A. High Torque Density and Low Torque Ripple Shaped-Magnet Machines Using Sinusoidal Plus Third Harmonic Shaped Magnets. IEEE Trans. Ind. Appl. 2019, 55, 2601–2610. [Google Scholar] [CrossRef]
- Patel, V.I.; Wang, J.; Nugraha, D.T.; Vuletic, R.; Tousen, J. Enhanced Availability of Drivetrain Through Novel Multiphase Permanent-Magnet Machine Drive. IEEE Trans. Ind. Electron. 2016, 63, 469–480. [Google Scholar] [CrossRef]
- Onsal, M.; Demir, Y.; Aydin, M. A New Nine-Phase Permanent Magnet Synchronous Motor with Consequent Pole Rotor for High-Power Traction Applications. IEEE Trans. Magn. 2017, 53, 8700606. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Permanent-Magnet Optimization in Permanent-Magnet-Assisted Synchronous Reluctance Motor for a Wide Constant-Power Speed Range. IEEE Trans. Ind. Electron. 2012, 59, 2495–2502. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Arafat, A.; Choi, S. Comparisons of Rare-Earth and Rare-Earth-Free External Rotor Permanent Magnet Assisted Synchronous Reluctance Motors. IEEE Trans. Ind. Electron. 2017, 64, 9729–9738. [Google Scholar] [CrossRef]
- Ngo, D.-K.; Hsieh, M.-F. Performance Analysis of Synchronous Reluctance Motor with Limited Amount of Permanent Magnet. Energies 2019, 12, 3504. [Google Scholar] [CrossRef] [Green Version]
- Jeong, C.-L.; Hur, J. Optimization Design of PMSM with Hybrid-Type Permanent Magnet Considering Irreversible Demagnetization. IEEE Trans. Magn. 2017, 53, 8110904. [Google Scholar] [CrossRef]
- Kim, K.-C.; Lim, S.-B.; Koo, D.-H.; Lee, J. The Shape Design of Permanent Magnet for Permanent Magnet Synchronous Motor Considering Partial Demagnetization. IEEE Trans. Magn. 2006, 42, 3485–3487. [Google Scholar] [CrossRef]
- Huang, H.; Hu, Y.-S.; Xiao, Y.; Lyu, H. Research of Parameters and Antidemagnetization of Rare-Earth-Less Permanent Magnet-Assisted Synchronous Reluctance Motor. IEEE Trans. Magn. 2015, 51, 8112504. [Google Scholar] [CrossRef]
- Park, G.-J.; Kim, J.-S.; Son, B.; Jung, S.-Y. Optimal Design of PMa-synRM for an Electric Propulsion System Considering Wide Operation Range and Demagnetization. IEEE Trans. Appl. Supercond. 2018, 28, 5205804. [Google Scholar] [CrossRef]
- Bianchi, N.; Mahmoud, H. An Analytical Approach to Design the PM in PMAREL Motors Robust Toward the Demagnetization. IEEE Trans. Energy Convers. 2016, 31, 800–809. [Google Scholar] [CrossRef]
- Faiz, J.; Nejadi-Koti, H. Demagnetization Fault Indexes in Permanent Magnet Synchronous Motors—An Overview. IEEE Trans. Magn. 2016, 52, 8201511. [Google Scholar] [CrossRef]
- Limsuwan, N.; Kato, T.; Akatsu, K.; Lorenz, R.D. Design and Evaluation of a Variable-Flux Flux-Intensifying Interior Permanent-Magnet Machine. IEEE Trans. Ind. Appl. 2014, 50, 1015–1024. [Google Scholar] [CrossRef]
- Prins, M.H.A.; Kamper, M.J. Design optimisation of field-intensified permanent magnet machine. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 117–123. [Google Scholar] [CrossRef]
- Zhu, X.; Huang, J.; Quan, L.; Xiang, Z.; Shi, B. Comprehensive Sensitivity Analysis and Multiobjective Optimization Research of Permanent Magnet Flux-Intensifying Motors. IEEE Trans. Ind. Electron. 2019, 66, 2613–2627. [Google Scholar] [CrossRef]
- Chui, M.-T.; Chiang, J.-A.; Gaing, Z.-L.; Hsien, Y.-Y. Design of a novel flux-intensifying interior permanent-magnet motor for applying to refrigerant compressor. In Proceedings of the 2015 18th International Conference on Electrical Machines and Systems (ICEMS), Pattaya, Thailand, 25–28 October 2015; pp. 232–236. [Google Scholar] [CrossRef]
- Ngo, D.-K.; Hsieh, M.-F.; Huynh, T.A. Torque Enhancement for a Novel Flux Intensifying PMa-SynRM Using Surface-Inset Permanent Magnet. IEEE Trans. Magn. 2019, 55, 8106108. [Google Scholar] [CrossRef]
- Jung, D.-H.; Kwak, Y.; Lee, J.; Jin, C.-S. Study on the Optimal Design of PMa-SynRM Loading Ratio for Achievement of Ultrapremium Efficiency. IEEE Trans. Magn. 2017, 53, 8001904. [Google Scholar] [CrossRef]
- Liu, C.-T.; Luo, T.-Y.; Shih, P.-C.; Yen, S.-C.; Lin, H.-N.; Hsu, Y.-W.; Hwang, C.-C.; Lin, H.-N. On the Design and Construction Assessments of a Permanent-Magnet-Assisted Synchronous Reluctance Motor. IEEE Trans. Magn. 2017, 53, 2002104. [Google Scholar] [CrossRef]
- Xu, M.; Liu, G.; Chen, Q.; Ji, J.; Zhao, W. Torque Calculation of Stator Modular PMa-SynRM With Asymmetric Design for Electric Vehicles. IEEE Trans. Transp. Electrif. 2021, 7, 202–213. [Google Scholar] [CrossRef]
- Ngo, D.-K.; Hsieh, M.-F. Analysis of Flux Intensifying Effect on Synchronous Motors Applied to Electric Scooter. In Proceedings of the 2019 IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 14–17 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Thao, N.G.M.; Zhong, S.; Fujisaki, K.; Iwamoto, F.; Kimura, T.; Yamada, T. Assessment of motor core loss, copper loss and magnetic flux density with PAM inverter under dissimilar excitation angles. IET Electr. Power Appl. 2020, 14, 622–637. [Google Scholar] [CrossRef]
- Thao, N.G.M.; Denis, N.; Wu, Y.; Odawara, S.; Fujisaki, K. Study of the Effect of Load Torque on the Iron Losses of Permanent Magnet Motors by using Finite Element Analysis. IEEJ J. Ind. Appl. 2019, 8, 522–531. [Google Scholar] [CrossRef] [Green Version]















| Parameter | Unit | Value |
|---|---|---|
| Outer radius of stator | mm | 80 |
| Outer radius of rotor | mm | 47 |
| Length of stack | mm | 32 |
| PM span | mm | 24 |
| PM thickness | mm | 1.5 |
| Motor volume | L | 0.6434 |
| PM volume | L | 0.0046 |
| PM/motor volume ratio | % | 0.72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsieh, M.-F.; Ngo, D.-K.; Thao, N.G.M. Flux Intensifying Feature of Permanent Magnet Assisted Synchronous Reluctance Motor with High Torque Density. Electronics 2022, 11, 397. https://doi.org/10.3390/electronics11030397
Hsieh M-F, Ngo D-K, Thao NGM. Flux Intensifying Feature of Permanent Magnet Assisted Synchronous Reluctance Motor with High Torque Density. Electronics. 2022; 11(3):397. https://doi.org/10.3390/electronics11030397
Chicago/Turabian StyleHsieh, Min-Fu, Duc-Kien Ngo, and Nguyen Gia Minh Thao. 2022. "Flux Intensifying Feature of Permanent Magnet Assisted Synchronous Reluctance Motor with High Torque Density" Electronics 11, no. 3: 397. https://doi.org/10.3390/electronics11030397
APA StyleHsieh, M. -F., Ngo, D. -K., & Thao, N. G. M. (2022). Flux Intensifying Feature of Permanent Magnet Assisted Synchronous Reluctance Motor with High Torque Density. Electronics, 11(3), 397. https://doi.org/10.3390/electronics11030397