1. Introduction
Integer-order analog signal processing requires the employment of fundamental filtering operations, such as the low-pass (LP) and high-pass (HP) filter functions described, respectively, by:
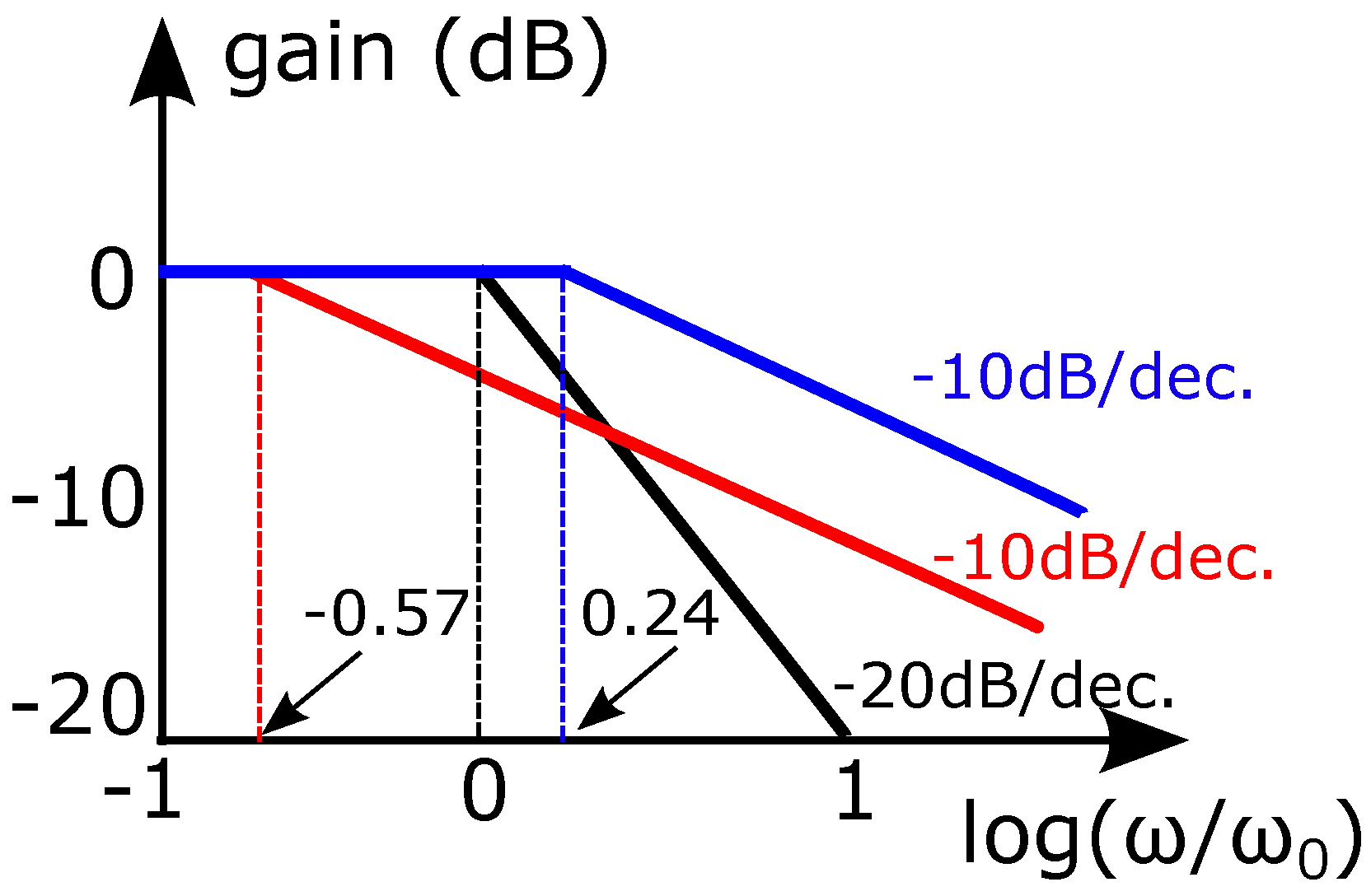
The characteristic frequency is the pole frequency of the transfer function and determines the half-power frequency , where a deviation of the maximum value of the gain is observed.
Non-integer order signal processing has received significant research interest in the following fields [
1,
2,
3,
4,
5,
6]. The first field is electrical engineering, for implementing filters and oscillators [
5,
7,
8,
9,
10,
11,
12,
13,
14,
15], chaotic systems [
16], sensor systems [
17], and control systems [
2,
18,
19,
20,
21]. This originates from the fact that both filters and oscillators offer additional degrees of freedom due to the non-integer order, which opens the door for scaling the characteristic frequencies of the filters/oscillators, as well as for precisely controlling the gradient of the transition from the pass-band to the stop-band. The first fact is very important in biomedical applications, where large time constants are required, while the second is a very attractive feature in acoustic applications (e.g., shelving filters) for implementing equalizers with fine tuning [
22], as well as in control applications (e.g., mechatronic systems), where loop-shaping tuning is performed to achieve the required frequency domain specifications, such as gain, margin etc. [
23]. The second field is biology/bio-medicine and chemistry, including electrochemical impedance spectroscopy (EIS), for the description of the behavior of biological tissues, and electrical models of human organs/systems [
24,
25,
26,
27,
28]. The third field is renewable energy systems, for the modeling of super-capacitors, batteries, and fuel cells [
29]. It has been proven that when employing non-integer order transfer functions, the behavior/characteristics of the aforementioned systems are represented in a more realistic way compared with their representation with integer-order counterparts.
Non-integer order transfer functions can be derived through:
(a) the employment of non-integer Laplace operators. Considering (
1a) and (
1b), this can be done through the substitution operation
, with
being the order of the operator. The resulting filters are denoted in the literature as fractional-order filters [
7,
8,
15].
(b) the employment of transfer functions, which are derived from their integer-order counterparts, raised to a non-integer exponent. Following this, the corresponding transfer functions, which are derived from (
1a) and (
1b), will have the form of
and
respectively, with
denoting the associated order. These types of filters are referred to as power-law filters in the literature [
22,
30].
Fractional-order filters cannot be implemented directly because fractional-order elements are not currently available. Their realization can be based on emulators that approximate the elements’ behavior and substitute the corresponding integer-order elements, or based on an integer-order rational transfer function, which approximates the original fractional-order function. The situation in power-law filters is different, in the sense that fractional-order elements are not required and, consequently, their implementation is always performed on a transfer-function basis using appropriate approximation techniques. Power-law filters were initially introduced and studied in [
30], where an op-amp-based implementation was presented. In [
22], voltage current conveyors (VCII) were utilized as active elements for implementing power-law filters for acoustic applications. In [
12], an optimization of power-law filter functions was performed, and the presented implementation was performed using Current-Feedback Operational Amplifiers (CFOAs) as active elements The aforementioned configurations are simple solutions, perfectly working for cases of filters with pre-defined type and frequency characteristics, as no programmability or tuning of the resistors’ and/or capacitors’ values is provided.
The contribution made in this work is the utilization of a field-programmable analog array (FPAA)-based power-law filter configuration, which offers tuning capability in power-law filters. According to the authors’ best knowledge, such a structure has not yet been presented in the literature.
The paper is organized as follows: a comparison between fractional-order (FO) and power-law (PL) filters is performed in
Section 2 to demonstrate their main differences. A functional block diagram (FBD) realization of power-law filters is presented in
Section 3, and its FPAA-based implementation, as well as the derived experimental results, are given in
Section 4.
3. Realization of Power-Law Filters
The approximation of the transfer functions in (
8) and (
11) can be performed through the utilization of the curve-fitting-based approximation technique [
20,
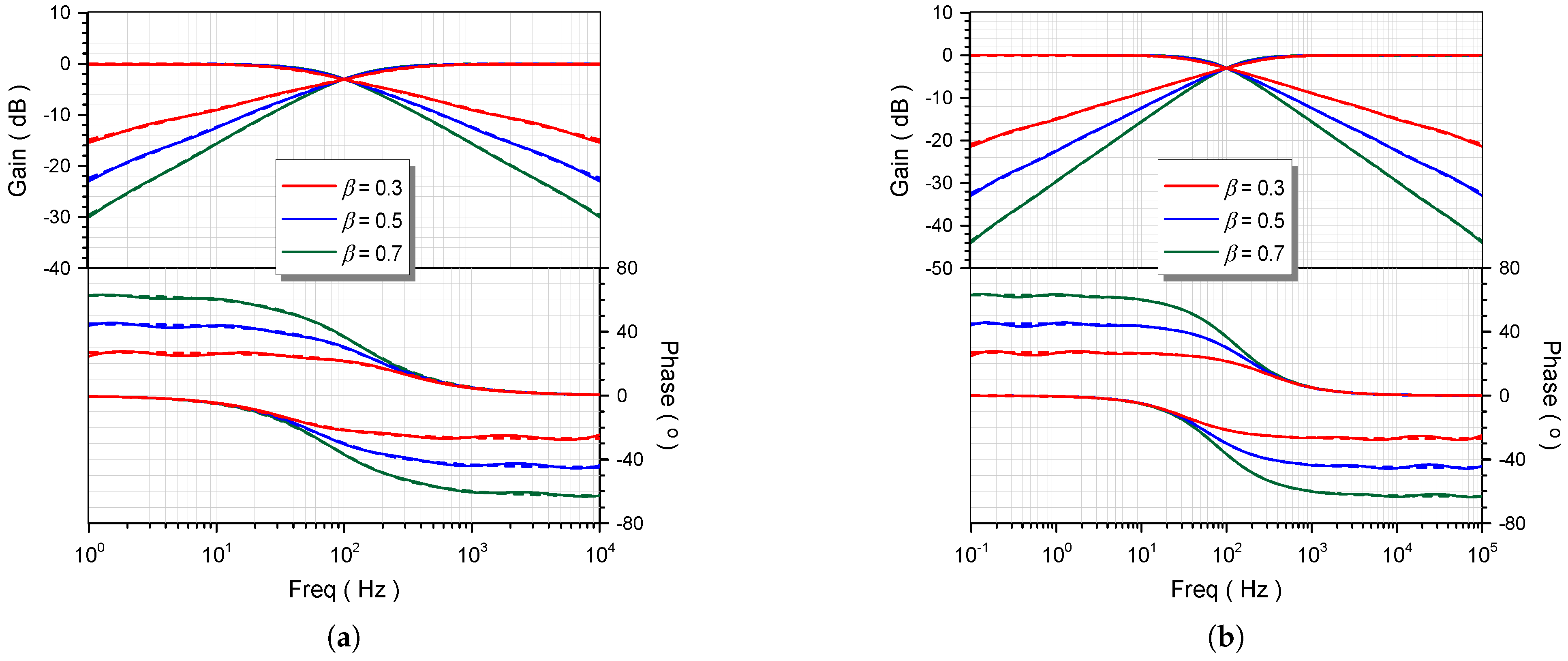
30]. Assuming third and fifth-order approximations, the derived MATLAB gain and phase frequency responses are in the ranges
and
, respectively, are provided in the plots of
Figure 2. As both cases offer the same level of accuracy, just for demonstration purposes, the third-order approximation in the range
, will be considered. Therefore, the derived integer-order rational transfer function has the general form of:
Considering that the desired half-power frequency is
, the values of these factor, for approximating the behavior of low-pass and high-pass filters of various orders within the frequency range
are summarized in
Table 1.
The implementation of (
14) can be done by the following ways: (a) cascade connection of intermediate filter sections, (b) multi-feedback configuration of intermediate filter sections (series connection), and (c) sum of intermediate filter sections. Although the structure derived from the first technique is simpler than those derived from the other techniques, it suffers from increased sensitivity. On the other hand, the other two techniques suffer from increased circuit complexity and, consequently, power consumption. The implementation of the approximate function is performed following the method introduced in [
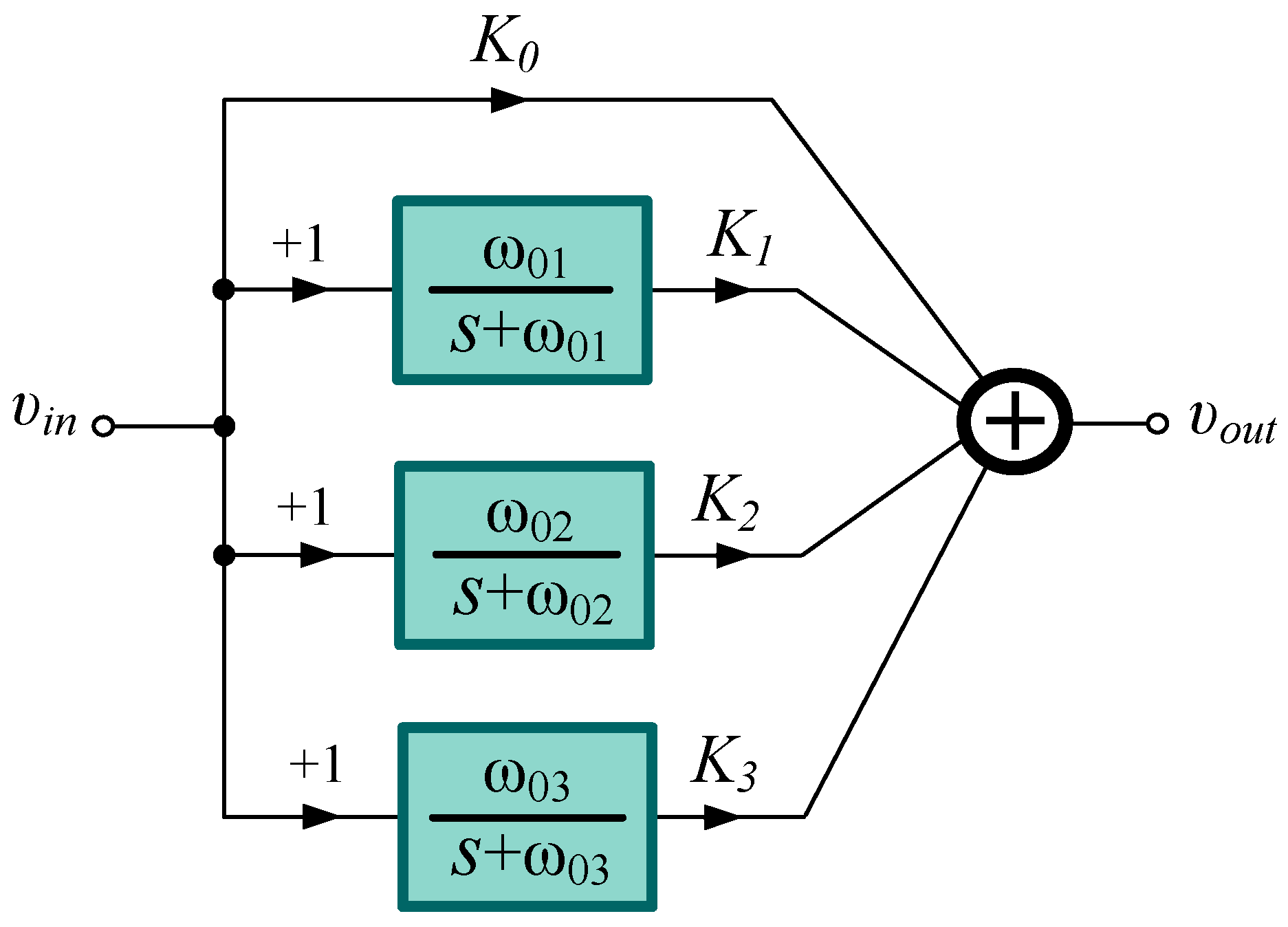
31]. Applying the partial fraction expansion (PFE) technique to the function in (
14), the obtained expression is a sum of integer-order low-pass terms and a constant factor, as described in:
In particular, considering that
r and
p are the residues and poles of (
14), respectively, the parameters in (
15) are calculated following the rules of thumb:
,
and
,
. The associated functional block diagram is formed as described in
Figure 3.
The calculated values of scaling factors and time constants
indicatively for LP and HP power-law filters of orders
are summarized in
Table 2. The realization of filters of orders greater than 1 can be performed using an extra integer-order bilinear filter of the same type as the power-law filter.
4. Experimental Results
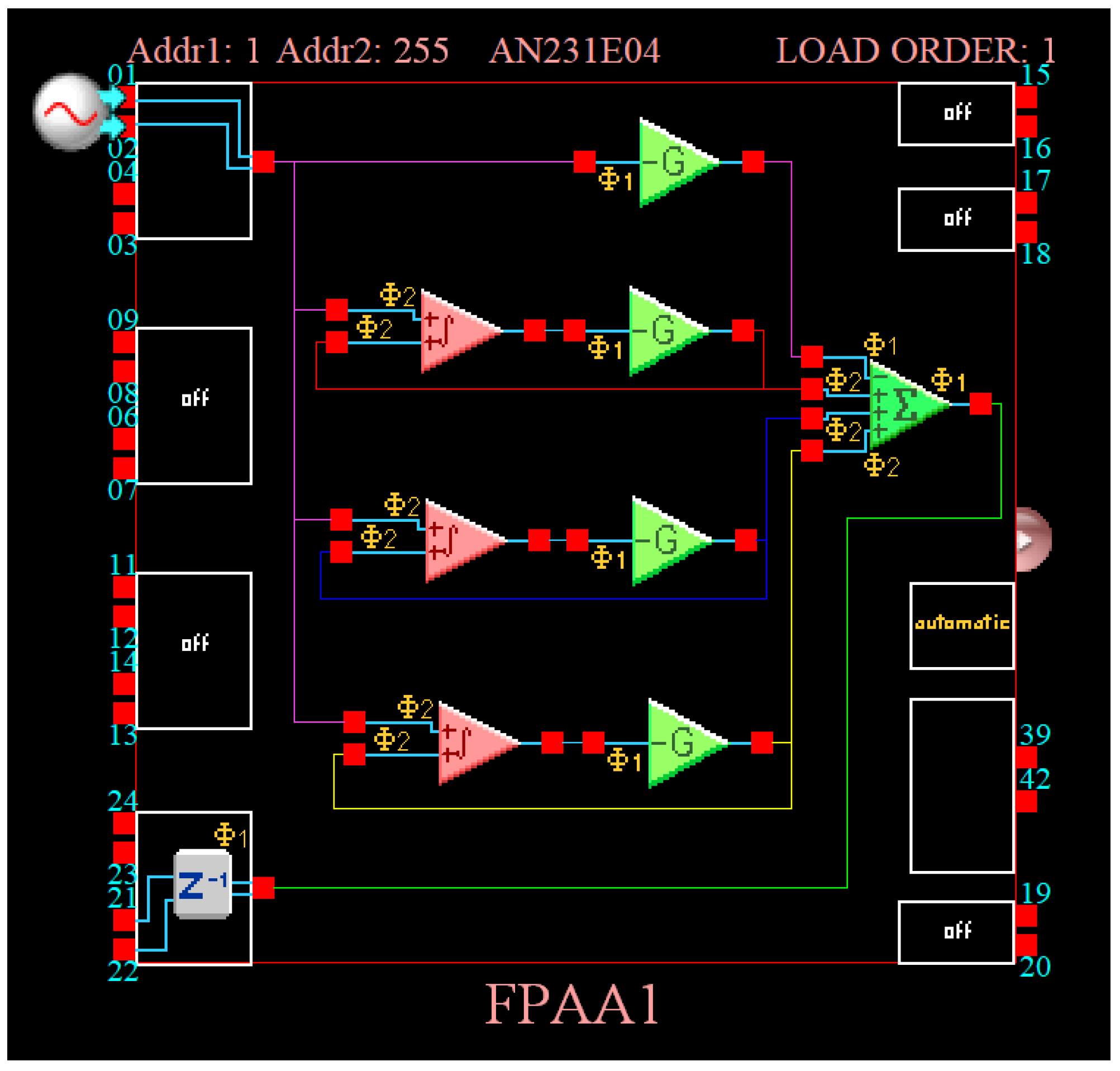
The experimental evaluation was performed using the Anadigm AN231K04 FPAA development board, programmed through the AnadigmDesigner
®2 EDA software [
32]. The PFE-based configuration depicted in
Figure 3 was used for realizing the design in
Figure 4, where
SumIntegrator,
SumDiff, and
GainHold configurable analogue modules (CAMs) were utilized, as described in
Table 3. There is a trade-off between the order of the approximation and the required hardware. As FPAA embeds four AN231E04 chips, each one having eight CAMs, it is obvious that when increasing the order, the number of required AN231E04 chips will be also increased. In the specific implementation, one chip is required. In the case that an approximation of greater order (e.g., 4 or 5) has been employed, then two or more chips would be required. The maximum frequency of the operation of the implemented filters depends on the chosen clock frequency, which is
= 100 kHz. Owing to the switched-capacitor nature of the stages included in the FPAA, the maximum operation frequency of the filters was
= 10 kHz.
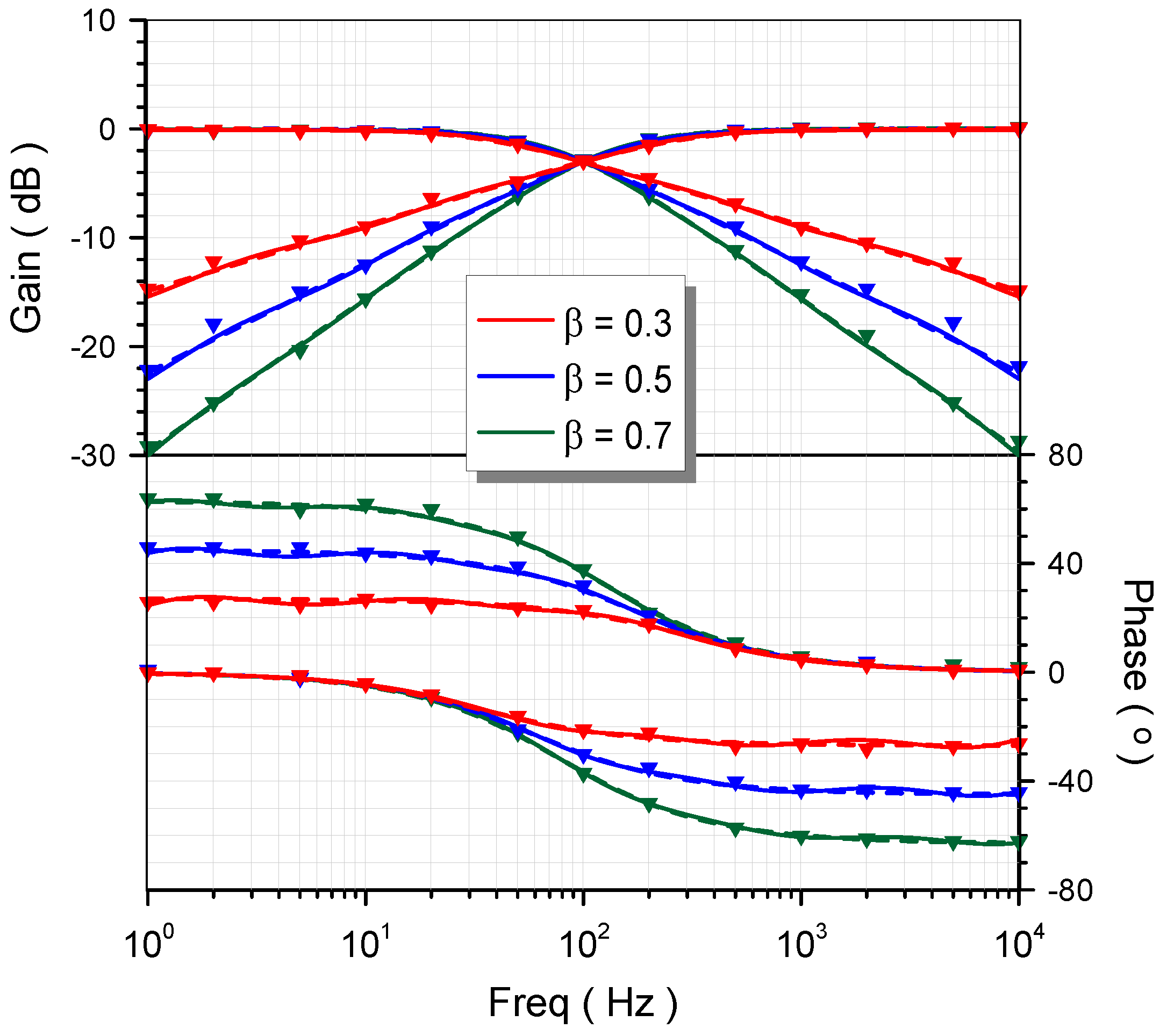
The experimental gain and phase frequency responses for the LP and HP filters of orders
within the range
are given in
Figure 5, indicated by triangle symbols, along with the respective results derived from the curve-fitting-based approximation (solid lines) and the theory (dashed lines). In addition, the experimental values of the critical characteristics for each case are presented in
Table 4 and
Table 5, with the respective theoretically calculated values given between parentheses.
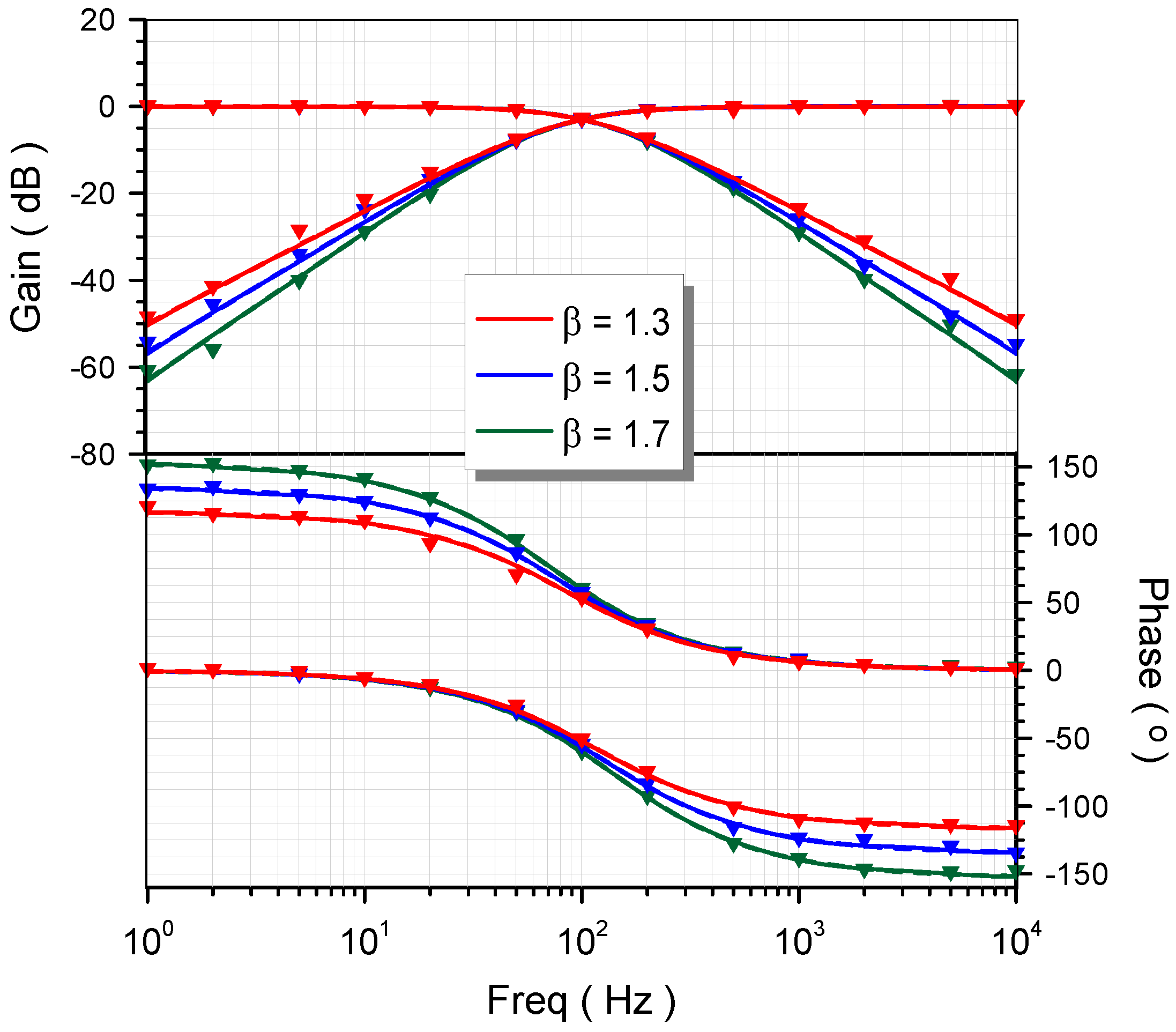
The corresponding results for orders
, which were obtained through the direct connection of the previously derived outputs with a first-order LP/HP filter, are given in
Figure 6 and
Table 6 and
Table 7.
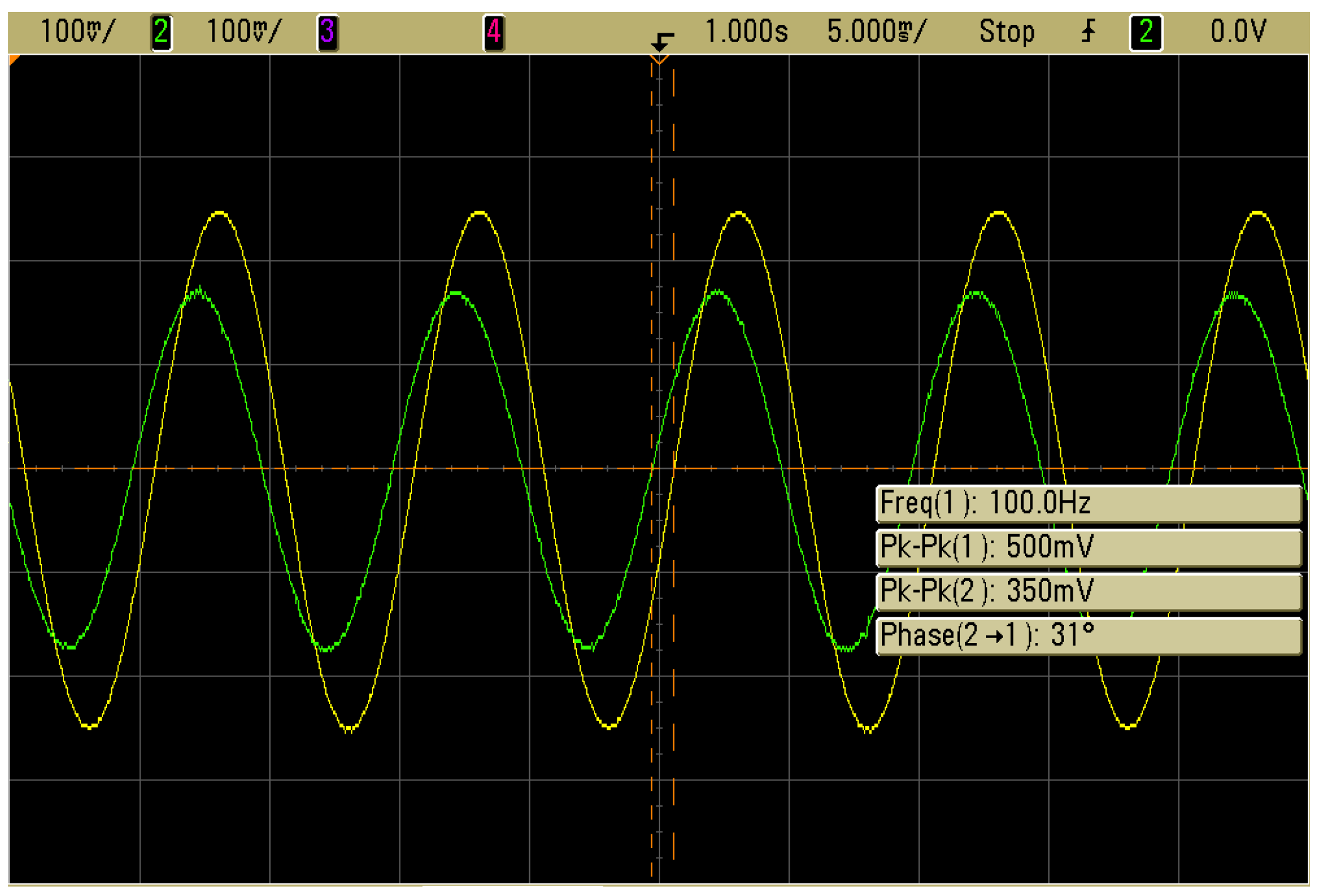
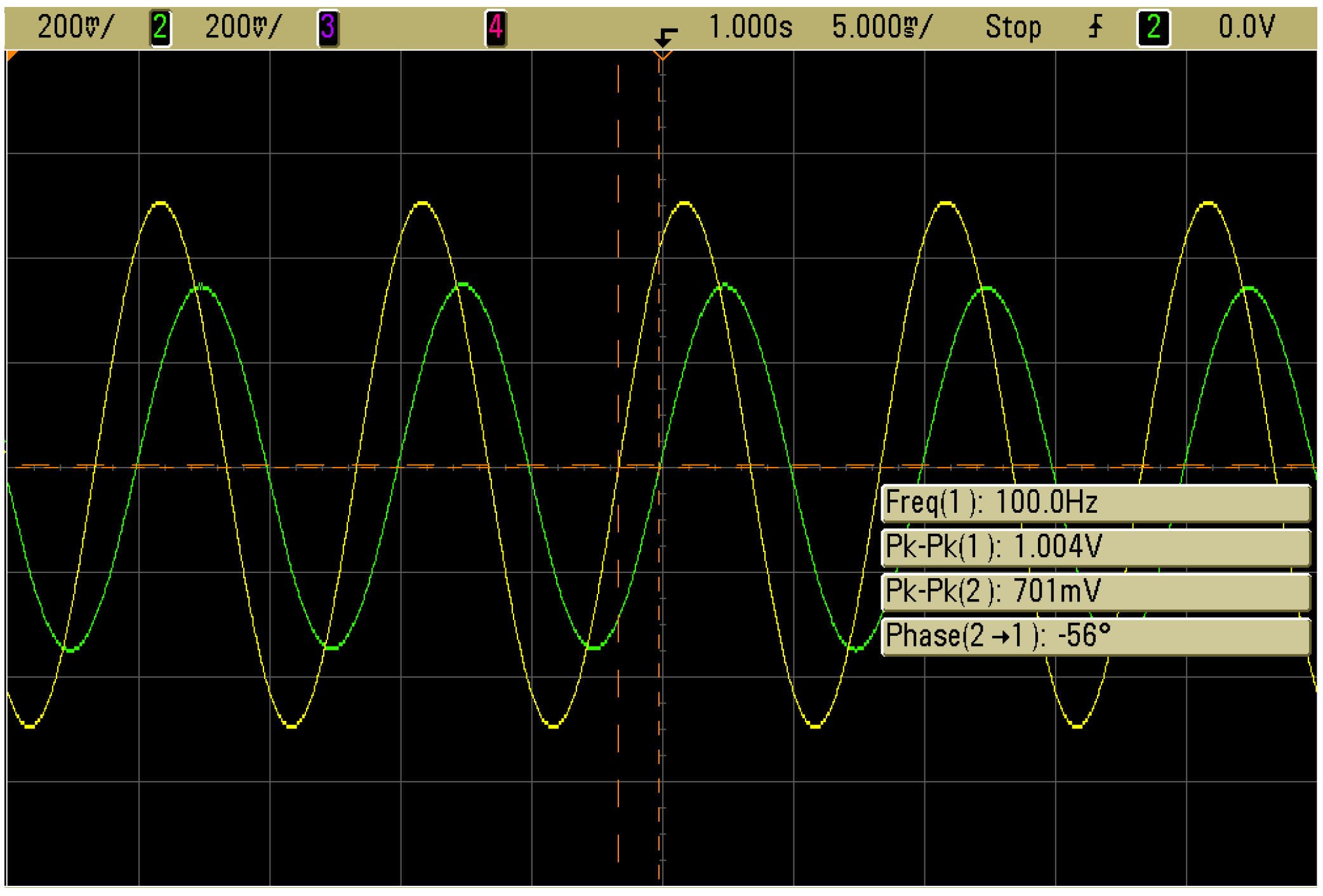
The efficient performance of the presented implementations in the time domain was also verified by simulating the filter with a sinusoidal signal of frequency
. Indicatively, the results in the case of an HP filter of order
and an LP filter of order
are presented, with the obtained waveforms being shown in
Figure 7 and
Figure 8. The measured values of the gain and phase are
(theor.
) and
(theor.
) for the HP filter, and
(theor.
) and
(theor.
) for the LP filter, respectively. Hence, the obtained results confirm the accurate performance of the presented topology.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}