
A Powered Floor System with Integrated Robot Localization





Abstract
:1. Introduction
Powered Floor State of the Art
2. Theoretical Framework
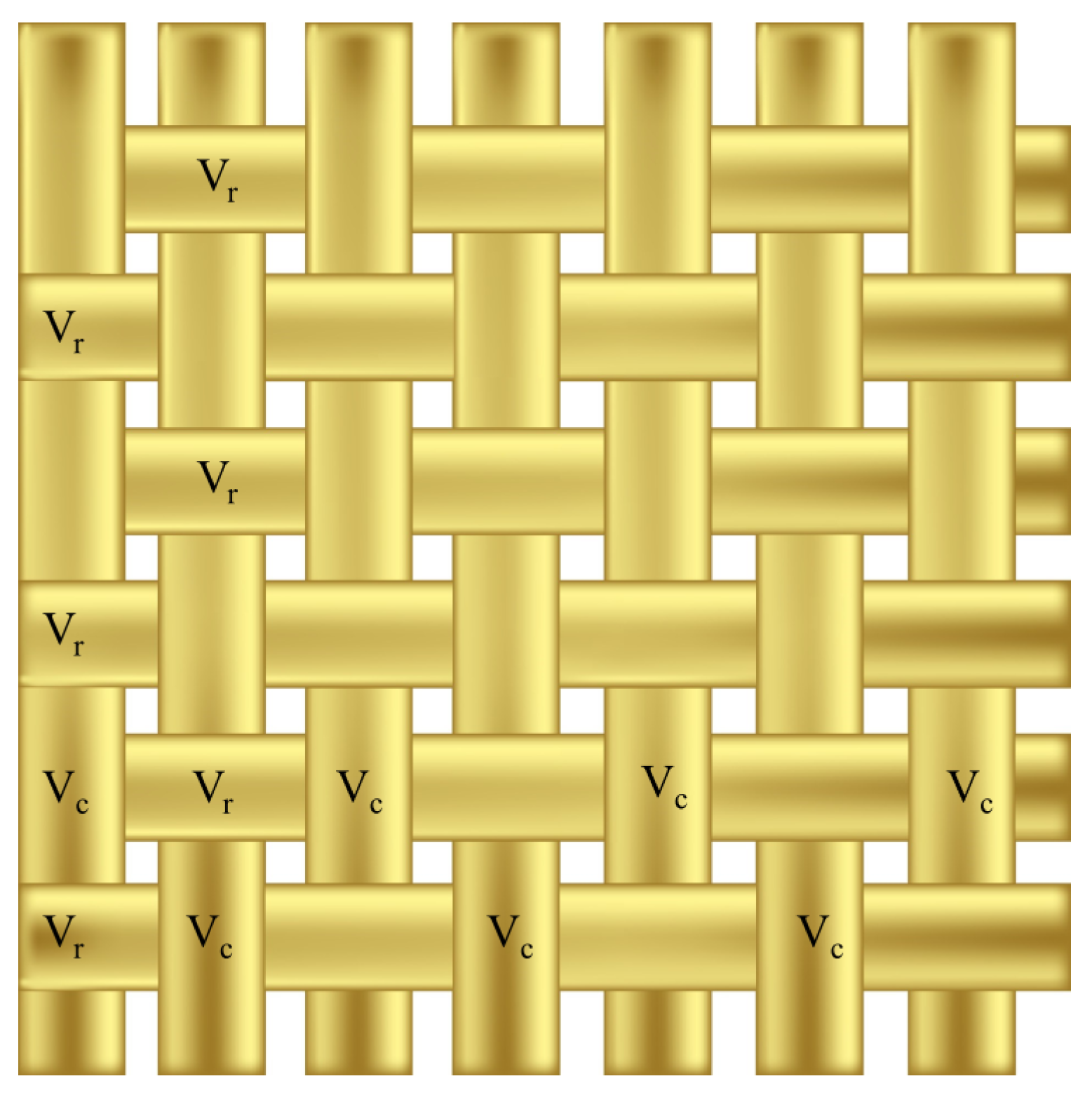
2.1. Power Supply Framework
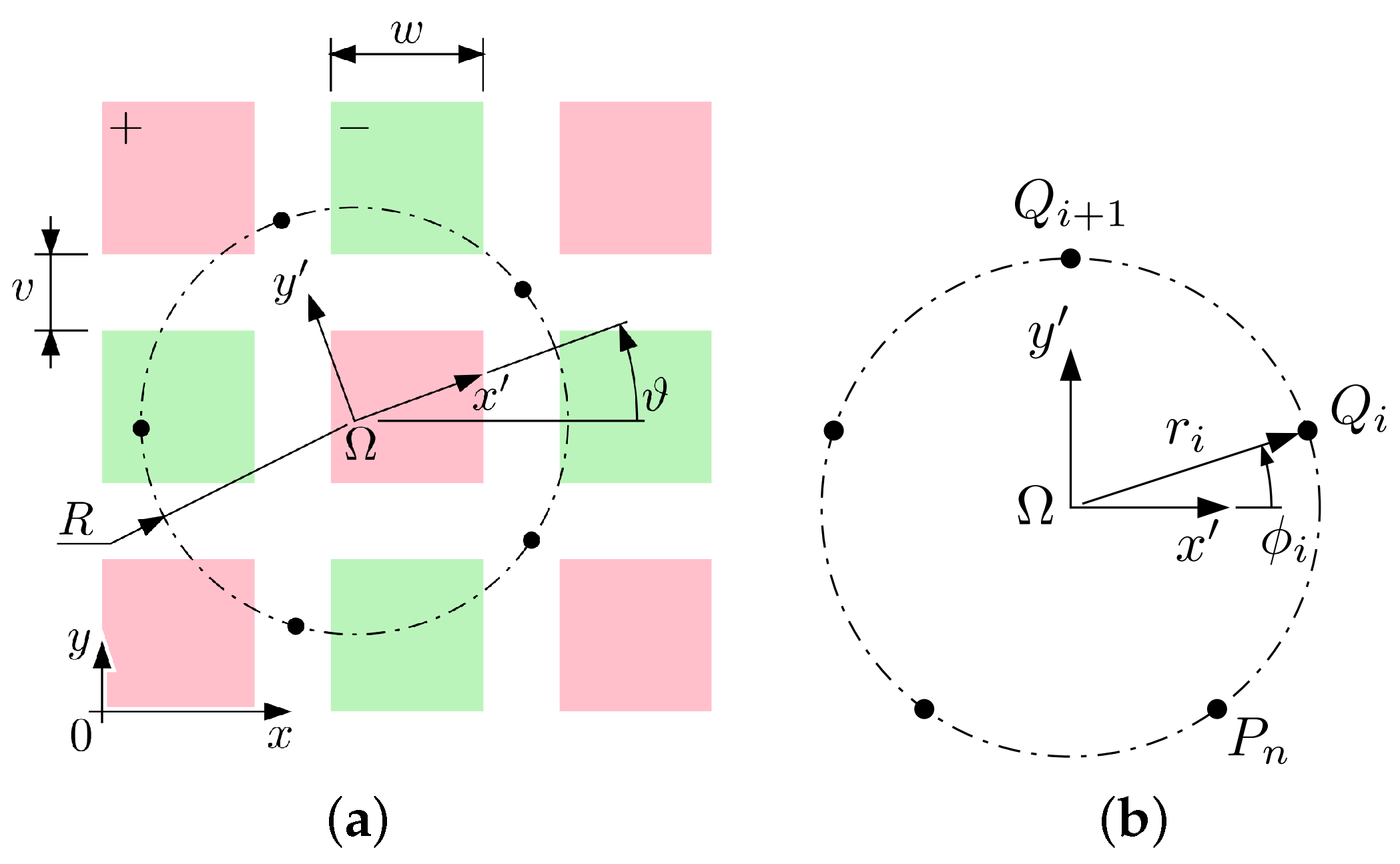
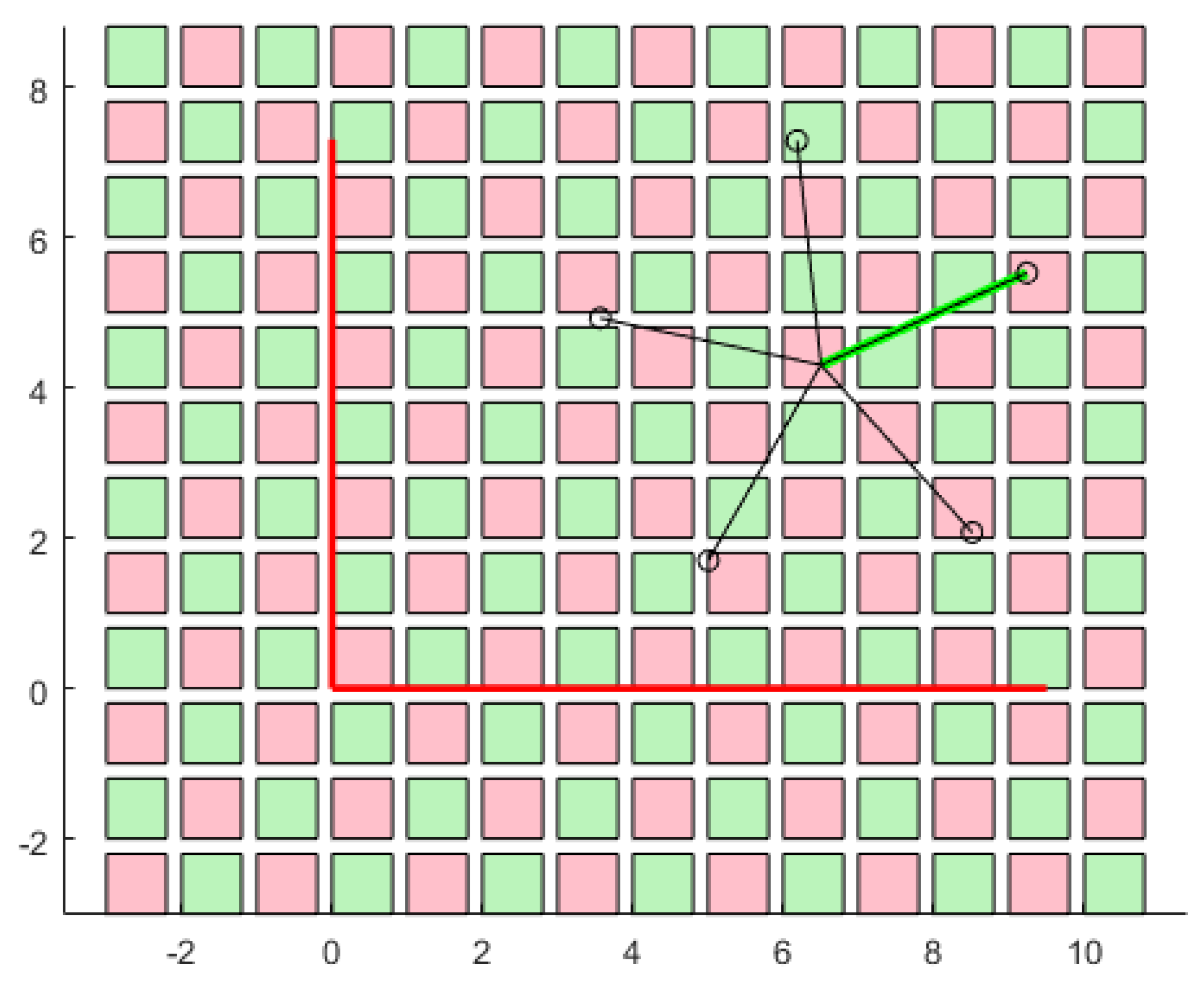
2.2. Localization
- (1)
- if the pin is touching a row stripe or a column stripe;
- (2)
- the (progressive) number of the row (or the column)—rows and columns are numbered sequentially.
3. Prototype Implementation
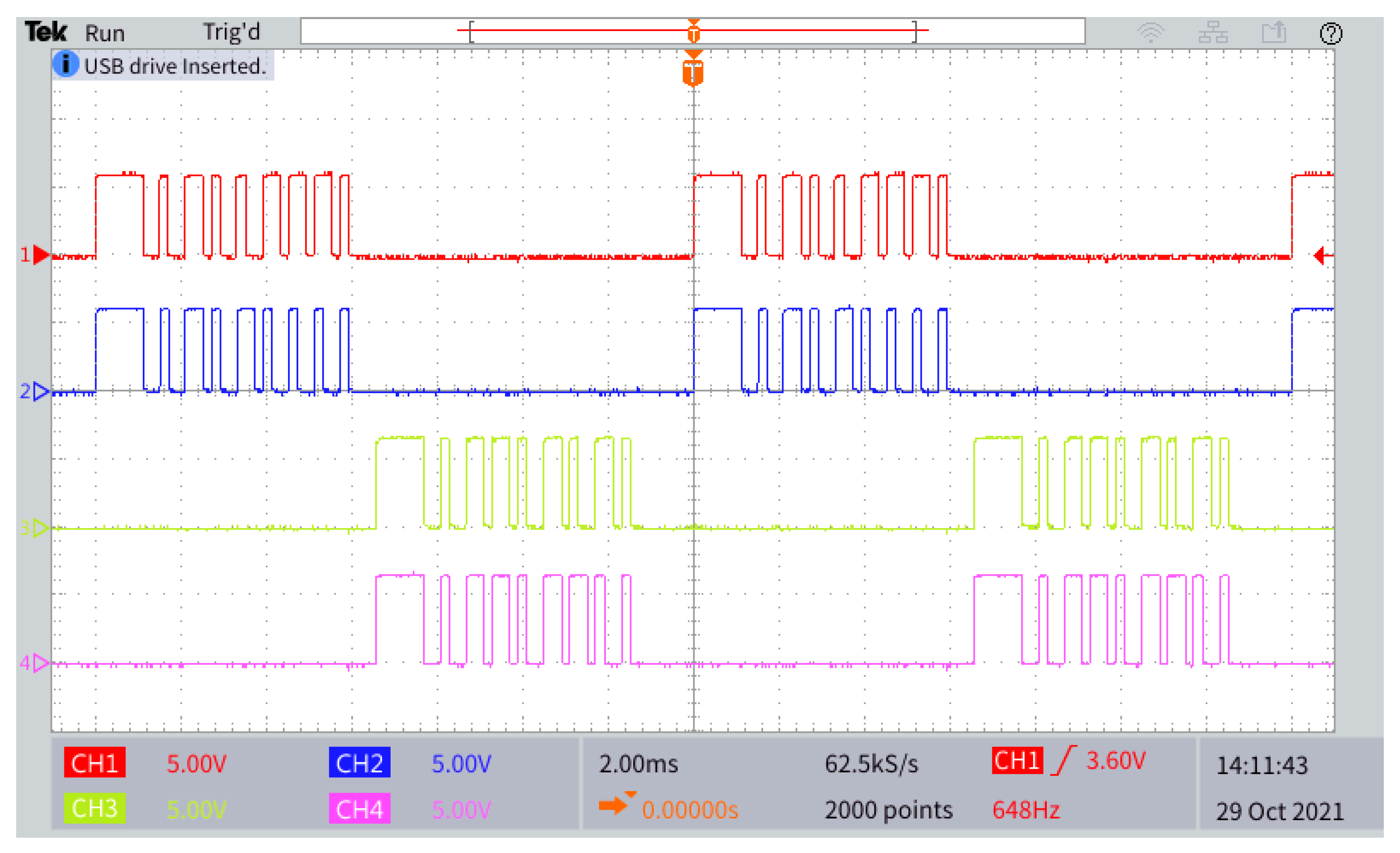
3.1. Power Modulation
- a long ( ) start pulse is used to ease synchronization at the receiver;
- 3 bits are used to identify the lane; even lane numbers are used for rows, odd lane numbers for columns;
- 4 bits are used to identify the row or column within the lane;
- finally, a stop bit (always 0 in the present implementation) completes the code.
- a voltage difference is available both when and when ,
- the average duty cycle of the PWM code, start pulse not included, is 50%,
- the short dead time at the end of the bursts is partially compensated by the long start pulse.
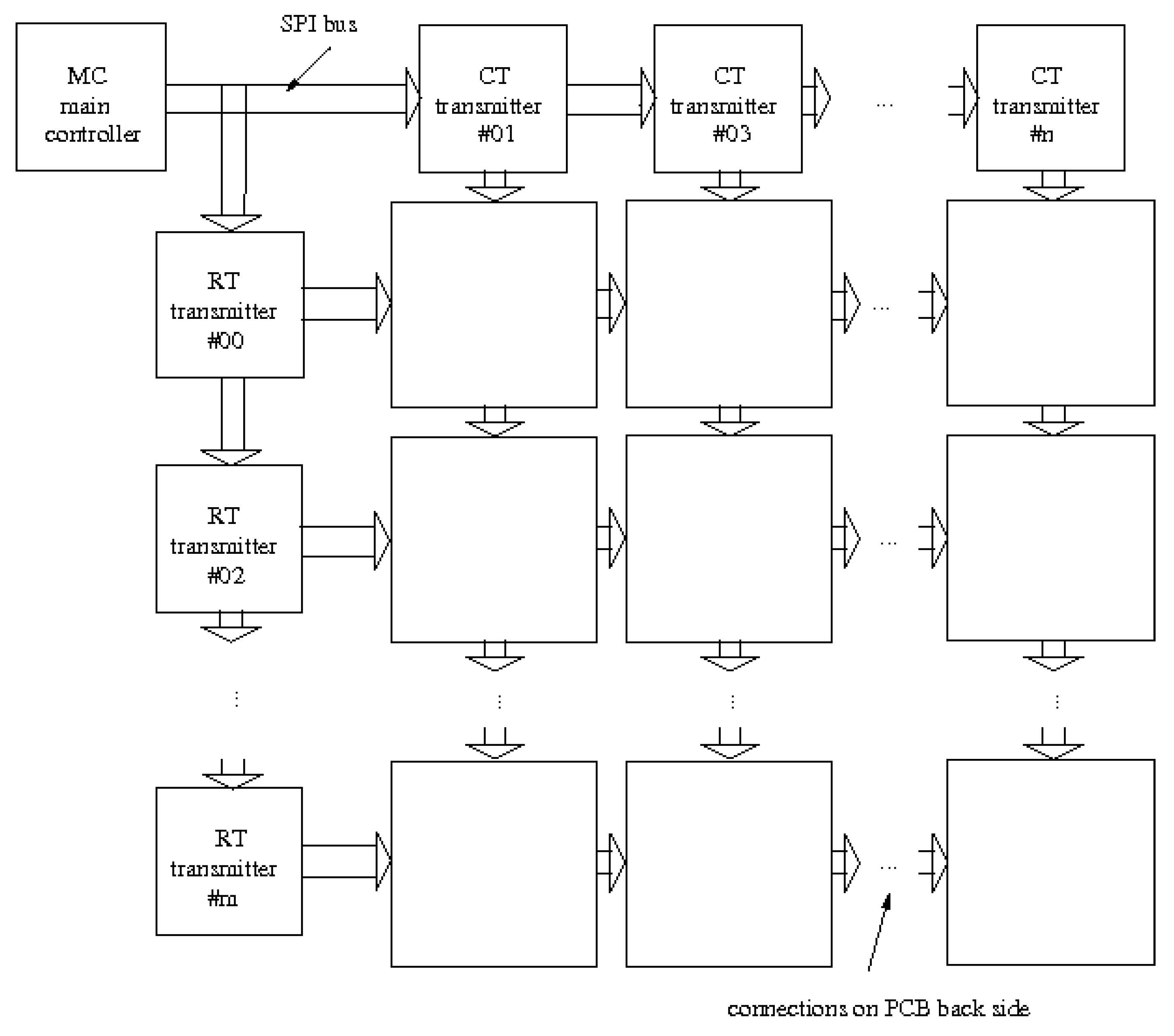
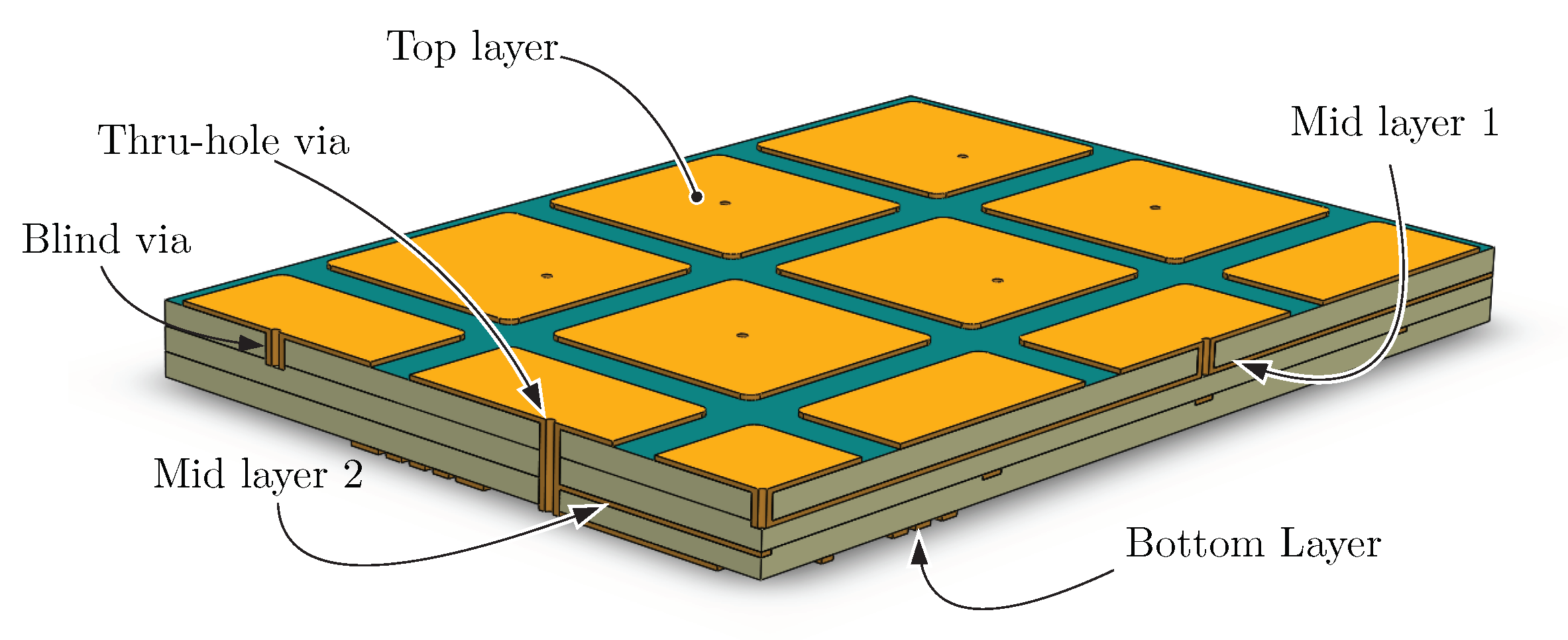
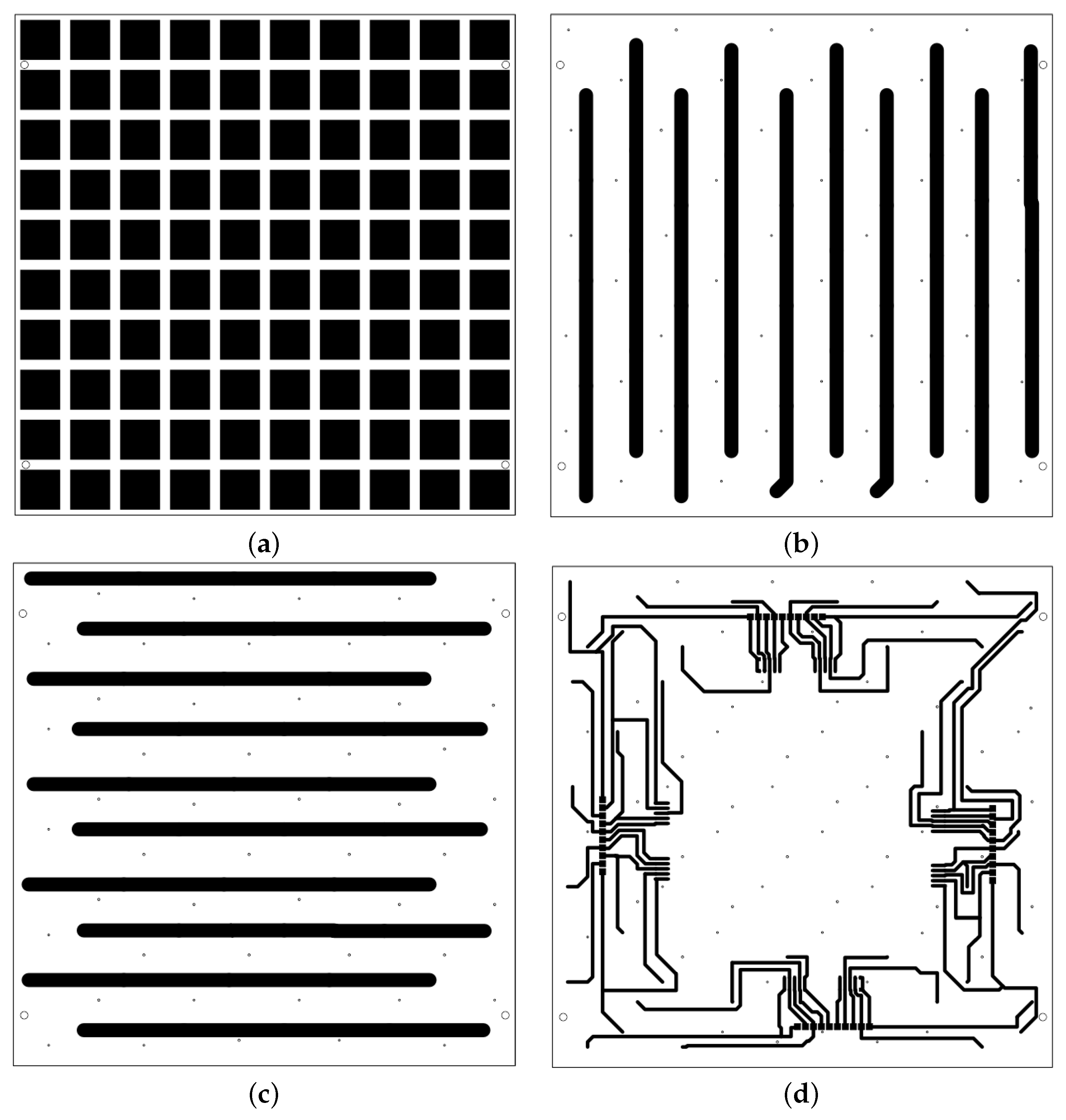
3.2. Powered Floor
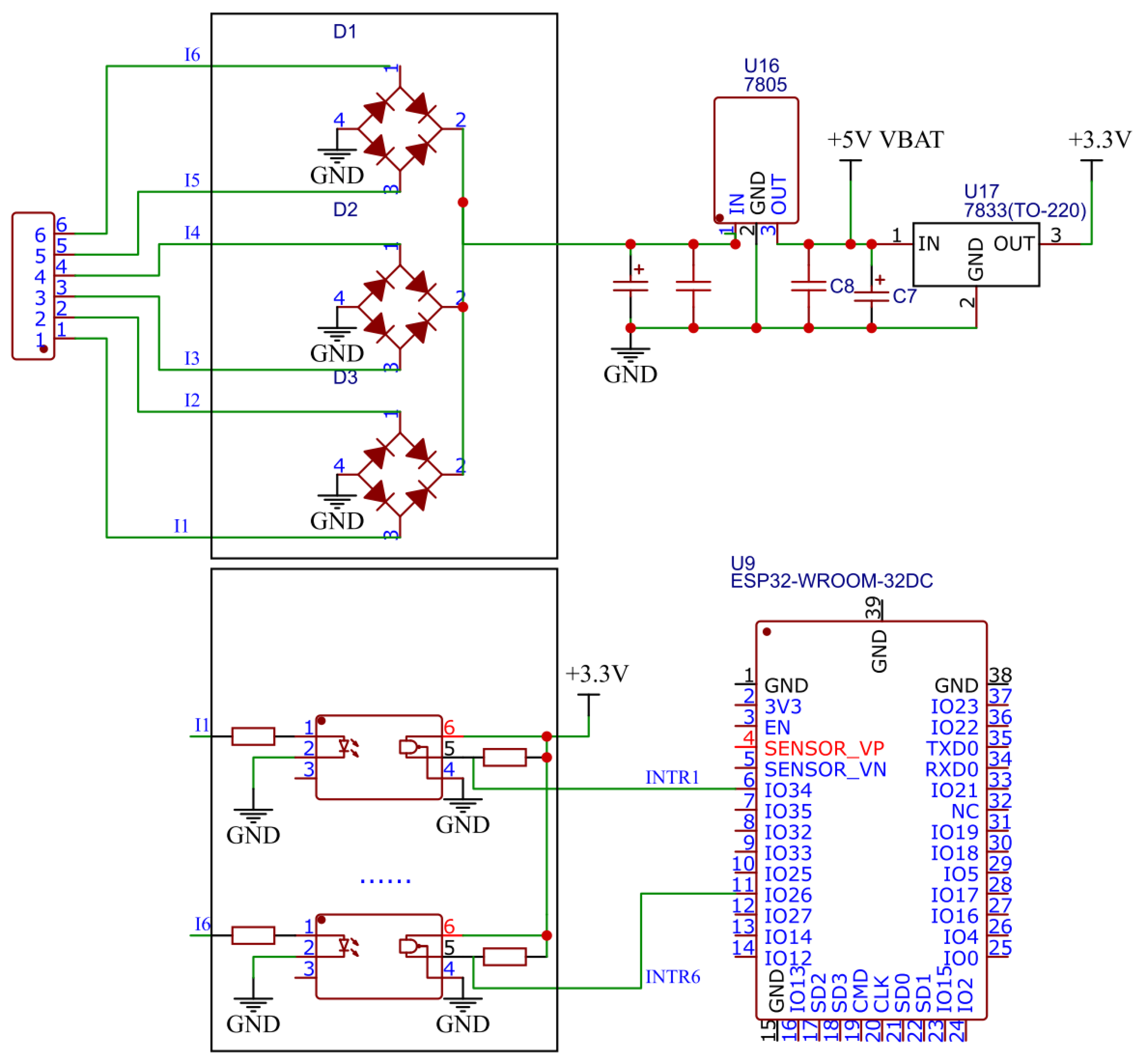
3.2.1. Main Controller
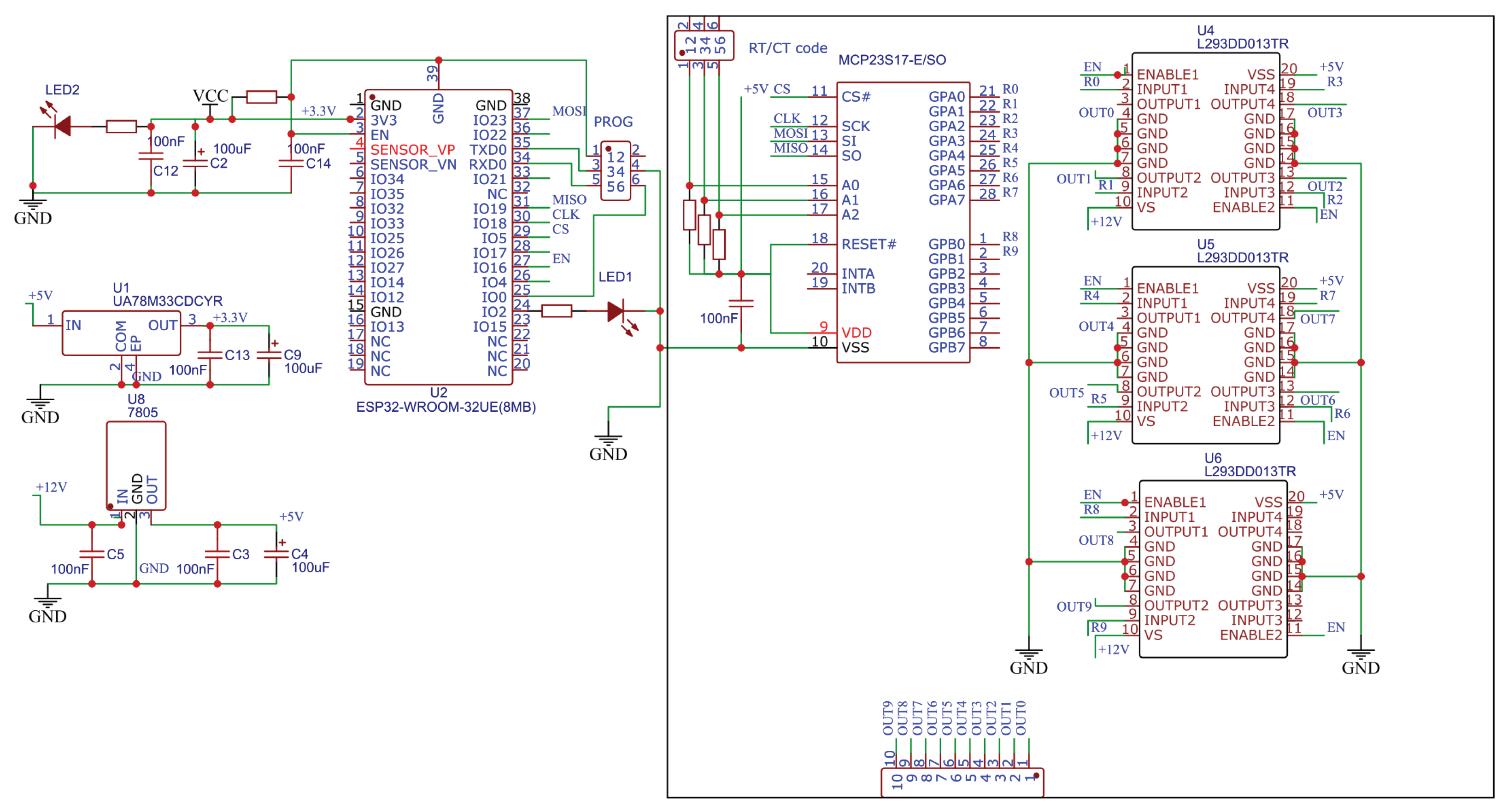
3.2.2. Transmitters
3.2.3. Tiles
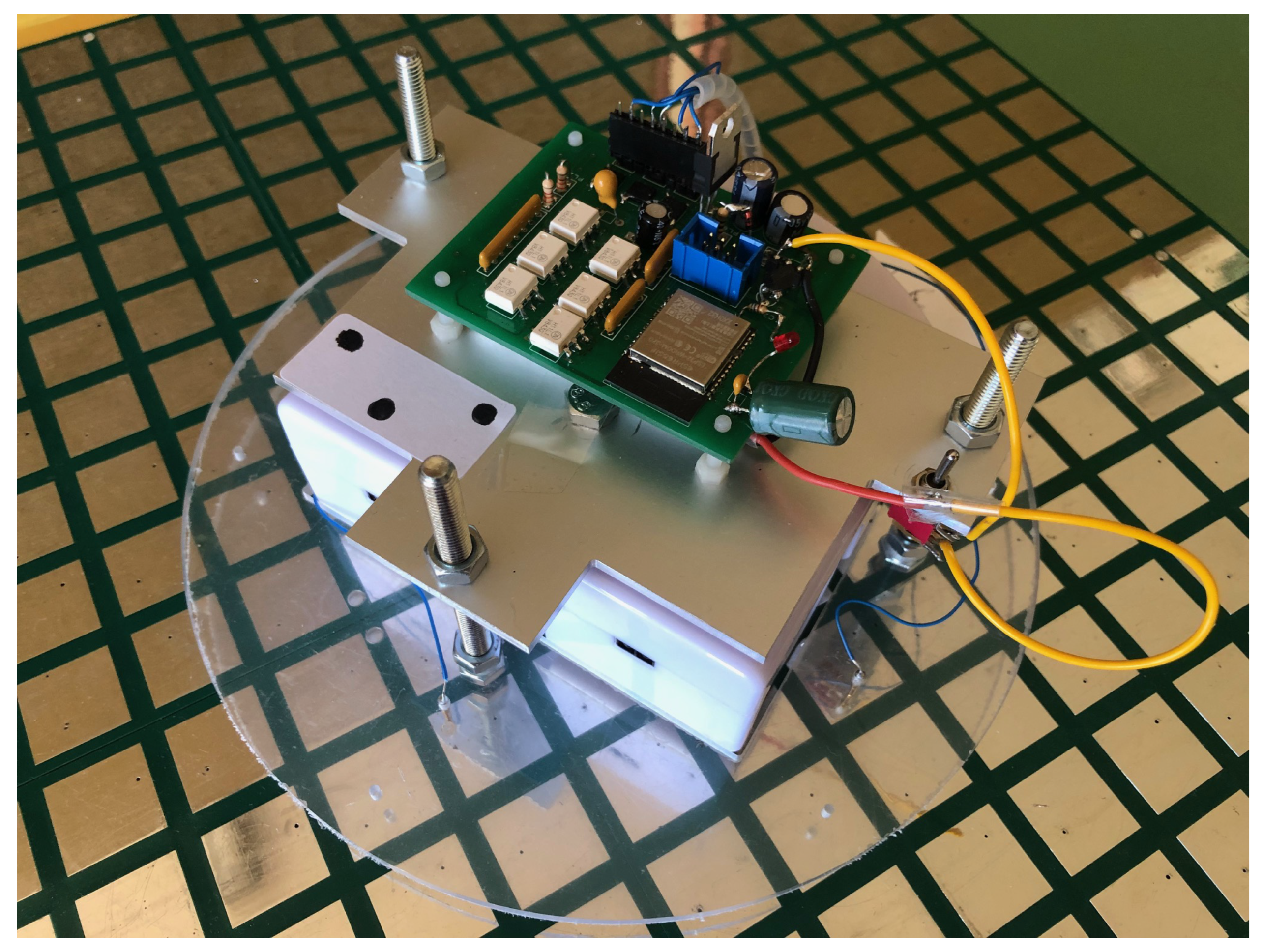
3.3. The Robot
Receiver Electronics
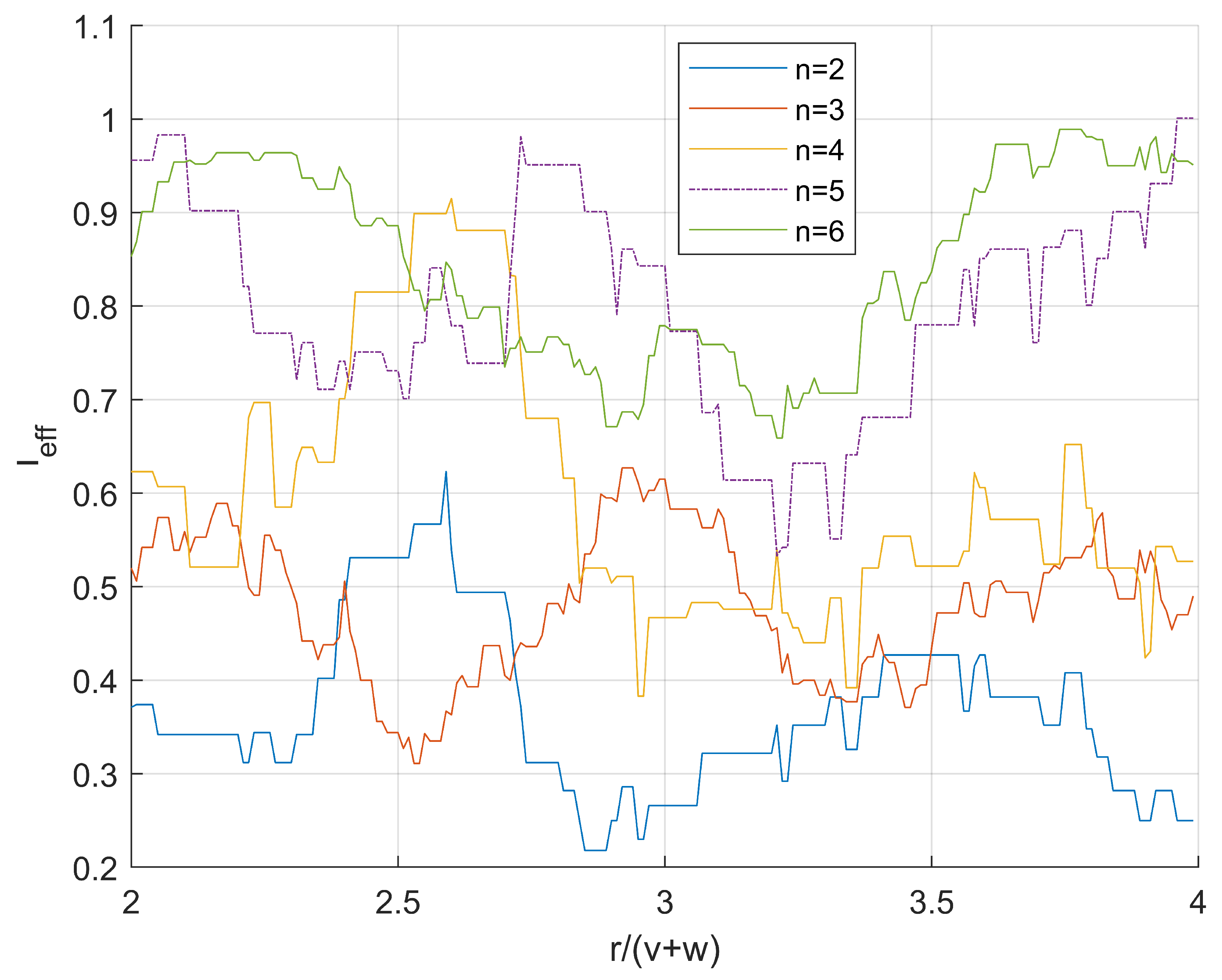
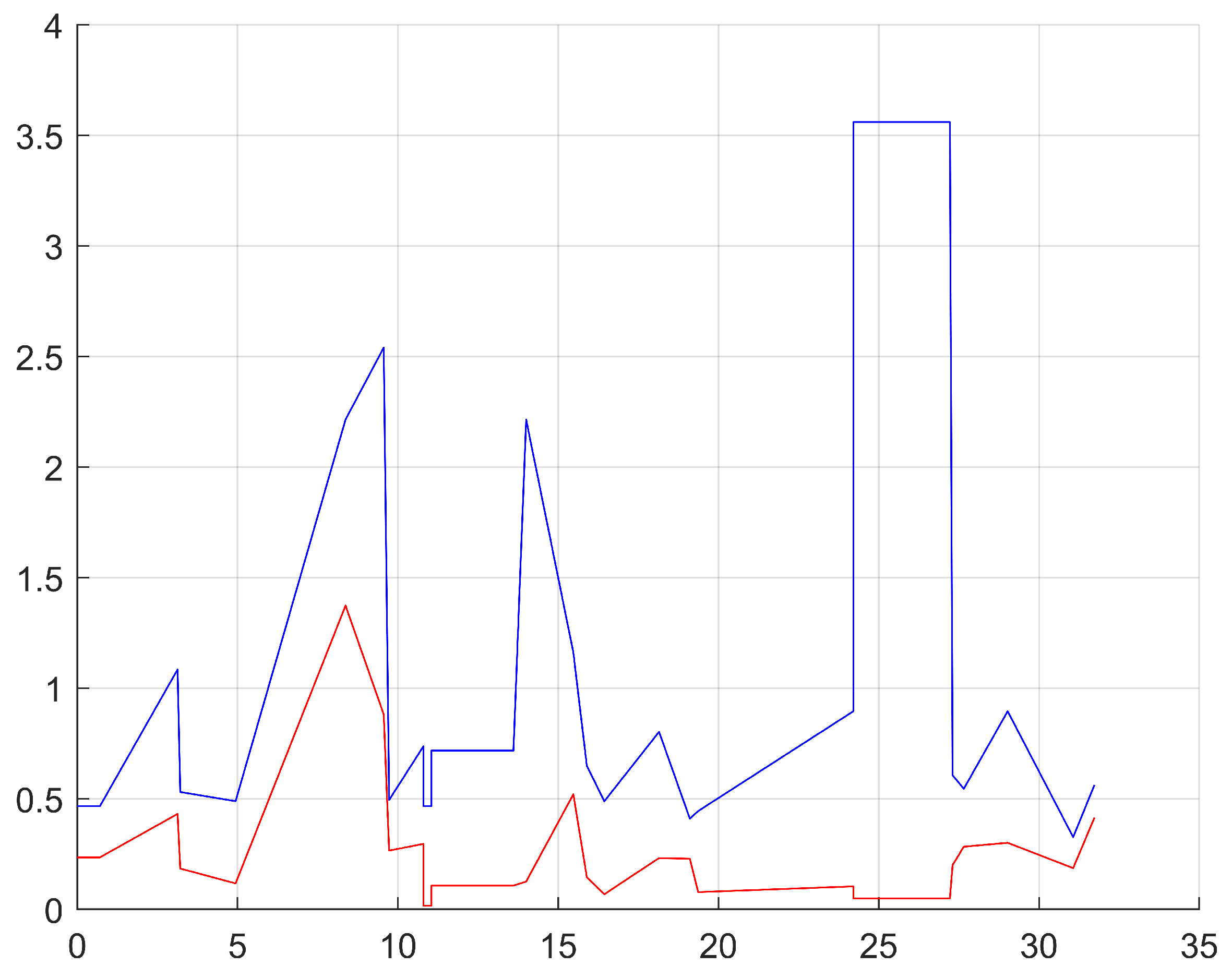
4. Test Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Seriani, S.; Medvet, E.; Carrato, S.; Gallina, P. A Complete Framework for the Synthesis of Powered Floor Systems. IEEE/ASME Trans. Mechatron. 2020, 25, 1045–1055. [Google Scholar] [CrossRef] [Green Version]
- Rezvanizaniani, S.; Liu, Z.; Chen, Y.; Lee, J. Review and recent advances in battery health monitoring and prognostics technologies for electric vehicle (EV) safety and mobility. J. Power Sources 2014, 256, 110–124. [Google Scholar] [CrossRef]
- Shing, A.; Wong, P. Wear of pantograph collector strips. Proc. Inst. Mech. Eng. Part J. Rail Rapid Transit 2008, 222, 169–176. [Google Scholar] [CrossRef]
- Ding, T.; Chen, G.; Bu, J.; Zhang, W. Effect of temperature and arc discharge on friction and wear behaviours of carbon strip/copper contact wire in pantograph-catenary systems. Wear 2011, 271, 1629–1636. [Google Scholar] [CrossRef]
- Pastena, L. A Catenary-Free Electrification for Urban Transport: An Overview of the Tramwave System. IEEE Electrif. Mag. 2014, 2, 16–21. [Google Scholar] [CrossRef]
- Mei, Y.; Lu, Y.H.; Hu, Y.; Lee, C. A case study of mobile robot’s energy consumption and conservation techniques. In Proceedings of the 2005 International Conference on Advanced Robotics—ICAR ‘05, Seattle, WA, USA, 18–20 July 2005; Volume 2005, pp. 492–497. [Google Scholar]
- Sadrpour, A.; Jin, J.; Ulsoy, A. Mission energy prediction for unmanned ground vehicles using real-time measurements and prior knowledge. J. Field Robot. 2013, 30, 399–414. [Google Scholar] [CrossRef]
- Rajan, V.; Nagendran, A.; Dehghani-Sanij, A.; Richardson, R. Tether monitoring for entanglement detection, disentanglement and localisation of autonomous robots. Robotica 2016, 34, 527–548. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Hu, M.; Cai, C.; Lin, Z.; Li, L.; Fang, Z. Optimization design of wireless charging system for autonomous robots based on magnetic resonance coupling. AIP Adv. 2018, 8, 055004. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Yang, G.; Li, E.; Liang, Z.; Lin, H. Modeling and analysis of wireless power transmission system for inspection robot. In Proceedings of the IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 28–31 May 2013. [Google Scholar]
- Li, S.; Mi, C. Wireless power transfer for electric vehicle applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Shin, J.; Shin, S.; Kim, Y.; Ahn, S.; Lee, S.; Jung, G.; Jeon, S.J.; Cho, D.H. Design and implementation of shaped magnetic-resonance-based wireless power transfer system for roadway-powered moving electric vehicles. IEEE Trans. Ind. Electron. 2014, 61, 1179–1192. [Google Scholar] [CrossRef]
- Musavi, F.; Edington, M.; Eberle, W. Wireless power transfer: A survey of EV battery charging technologies. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition—ECCE 2012, Raleigh, NC, USA, 15–20 September 2012; pp. 1804–1810. [Google Scholar]
- Huh, J.; Lee, S.; Lee, W.; Cho, G.; Rim, C. Narrow-width inductive power transfer system for online electrical vehicles. IEEE Trans. Power Electron. 2011, 26, 3666–3679. [Google Scholar] [CrossRef]
- Marinescu, A.; Rosu, G.; Mandache, L.; Baltag, O. Achievements and Perspectives in Contactless Power Transmission. In Proceedings of the EPE 2018—2018 10th International Conference and Expositions on Electrical And Power Engineering, Iasi, Romania, 18–19 October 2018; pp. 638–645. [Google Scholar]
- Jang, Y. Survey of the operation and system study on wireless charging electric vehicle systems. Transp. Res. Part Emerg. Technol. 2018, 95, 844–866. [Google Scholar] [CrossRef]
- Hasanzadeh, S.; Vaez-Zadeh, S. A review of contactless electrical power transfer: Applications, challenges and future trends [Pregled slanja u području bezkontaktnog prijenosa električne energije: Primjene, izazovi i trendovi]. Automatika 2015, 56, 367–378. [Google Scholar] [CrossRef] [Green Version]
- Rappaport, M.; Bettstetter, C. Coordinated recharging of mobile robots during exploration. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; Volume 2017, pp. 6809–6816. [Google Scholar]
- Nakamura, S.; Hashimoto, S.; Hashimoto, H. Preliminary development of an Energy Logistics as a new wireless power transmission method. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 7843–7848. [Google Scholar]
- Seriani, S.; Gallina, P.; Wedler, A. Dynamics of a tethered rover on rough terrain. Mech. Mach. Sci. 2017, 47, 355–361. [Google Scholar]
- Seriani, S.; Gallina, P.; Wedler, A. A modular cable robot for inspection and light manipulation on celestial bodies. Acta Astronaut. 2016, 123, 145–153. [Google Scholar] [CrossRef]
- Poljanec, D.; Kalin, M.; Kumar, L. Influence of contact parameters on the tribological behaviour of various graphite/graphite sliding electrical contacts. Wear 2018, 406-407, 75–83. [Google Scholar] [CrossRef]
- Grandin, M.; Wiklund, U. Wear and electrical performance of a slip-ring system with silver-graphite in continuous sliding against PVD coated wires. Wear 2016, 348–349, 138–147. [Google Scholar] [CrossRef]
- Arvin, F.; Watson, S.; Turgut, A.; Espinosa, J.; Krajník, T.; Lennox, B. Perpetual Robot Swarm: Long-Term Autonomy of Mobile Robots Using On-the-fly Inductive Charging. J. Intell. Robot. Syst. Theory Appl. 2017, 92, 395–412. [Google Scholar] [CrossRef]
- Martel, S.; Sherwood, M.; Helm, C.; de Quevedo, W.G.; Fofonoff, T.; Dyer, R.; Bevilacqua, J.; Kaufman, J.; Roushdy, O.; Hunter, I. Three-legged wireless miniature robots for mass-scale operations at the sub-atomic scale. In Proceedings of the 2001 ICRA—IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Republic of Korea, 21–26 May 2001; Volume 4, pp. 3423–3428. [Google Scholar]
- Seriani, S.; Scalera, L.; Gasparetto, A.; Gallina, P. A new family of magnetic adhesion based wall-climbing robots. Mech. Mach. Sci. 2019, 68, 223–230. [Google Scholar]
- Watson, R.; Ficici, S.; Pollack, J. Embodied Evolution: Distributing an evolutionary algorithm in a population of robots. Robot. Auton. Syst. 2002, 39, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Klingner, J.; Kanakia, A.; Farrow, N.; Reishus, D.; Correll, N. A stick-slip omnidirectional powertrain for low-cost swarm robotics: Mechanism, calibration, and control. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 846–851. [Google Scholar]
- Bongard, J.C. Evolutionary robotics. Commun. ACM 2013, 56, 74–83. [Google Scholar] [CrossRef] [Green Version]
- Garaffa, L.C.; Basso, M.; Konzen, A.A.; de Freitas, E.P. Reinforcement Learning for Mobile Robotics Exploration: A Survey. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef] [PubMed]
- Koos, S.; Mouret, J.B.; Doncieux, S. The transferability approach: Crossing the reality gap in evolutionary robotics. IEEE Trans. Evol. Comput. 2013, 17, 122–145. [Google Scholar] [CrossRef]
- Salvato, E.; Fenu, G.; Medvet, E.; Pellegrino, F.A. Crossing the Reality Gap: A Survey on Sim-to-Real Transferability of Robot Controllers in Reinforcement Learning. IEEE Access 2021, 9, 153171–153187. [Google Scholar] [CrossRef]
- Alatise, M.B.; Hancke, G.P. Review on Challenges of Autonomous Mobile Robot and Sensor Fusion Methods. IEEE Access 2020, 8, 39830–39846. [Google Scholar] [CrossRef]
- Borenstein, J.; Everett, H.; Feng, L. Navigating Mobile Robots: Systems and Techniques; A K Peters, Ltd.: Wellesley, MA, USA, 1996. [Google Scholar]
- Magnago, V.; Corbalán, P.; Picco, G.P.; Palopoli, L.; Fontanelli, D. Robot Localization via Odometry-assisted Ultra-wideband Ranging with Stochastic Guarantees. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 1607–1613. [Google Scholar]
- Ramezani, M.; Wang, Y.; Camurri, M.; Wisth, D.; Mattamala, M.; Fallon, M. The Newer College Dataset: Handheld LiDAR, Inertial and Vision with Ground Truth. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 4353–4360. [Google Scholar]
- Carballido, J.; Perez-Ruiz, M.; Emmi, L.; Agüera, J. Comparison of positional accuracy between rtk and rtx gnss based on the autonomous agricultural vehicles under field conditions. Appl. Eng. Agric. 2014, 30, 361–366. [Google Scholar]
- Zmuda, M.A.; Elesev, A.; Morton, Y.T. Robot Localization Using RE and Inertial Sensor. In Proceedings of the 2008 IEEE National Aerospace and Electronics Conference, Dayton, OH, USA, 16–18 July 2008; pp. 343–348. [Google Scholar]
- Topley, M.; Richards, J.G. A comparison of currently available optoelectronic motion capture systems. J. Biomech. 2020, 106, 109820. [Google Scholar] [CrossRef] [PubMed]
- Lanzisera, S.; Lin, D.T.; Pister, K.S.J. R RF Time of Flight Ranging for Wireless Sensor Network Localization. In Proceedings of the 2006 International Workshop on Intelligent Solutions in Embedded Systems, Vienna, Austria, 30 June 2006; pp. 1–12. [Google Scholar]
- Bonin-Font, F.; Ortiz, A.; Oliver, G. Visual Navigation for Mobile Robots: A Survey. J. Intell. Robot. Syst. 2008, 53, 263–296. [Google Scholar] [CrossRef]
- Taheri, H.; Xia, Z.C. SLAM; definition and evolution. Eng. Appl. Artif. Intell. 2021, 97, 104032. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Context | Dimension | Requires External Sensors | Power Delivery |
|---|---|---|---|---|
| GNSS [37] | Absolute | 3D | Yes | - |
| Motion capture [39] | Absolute | 3D | Yes | - |
| RF triangulation [38,40] | Absolute | 2D/3D | - | - |
| SLAM (3D LiDAR-based) [36] | Relative | 3D | - | - |
| SLAM (Visual-based) [41] | Relative | 2D/3D | - | - |
| SLAM (2D LiDAR-based) [42] | Relative | 2D | - | - |
| Odometry [35] | Relative | 2D | - | - |
| Powered floor with localization | Absolute | 2D | Yes | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seriani, S.; Carrato, S.; Medvet, E.; Cernigoi, A.; Zibai, A.; Gallina, P. A Powered Floor System with Integrated Robot Localization. Electronics 2023, 12, 234. https://doi.org/10.3390/electronics12010234
Seriani S, Carrato S, Medvet E, Cernigoi A, Zibai A, Gallina P. A Powered Floor System with Integrated Robot Localization. Electronics. 2023; 12(1):234. https://doi.org/10.3390/electronics12010234
Chicago/Turabian StyleSeriani, Stefano, Sergio Carrato, Eric Medvet, Andrea Cernigoi, Adriano Zibai, and Paolo Gallina. 2023. "A Powered Floor System with Integrated Robot Localization" Electronics 12, no. 1: 234. https://doi.org/10.3390/electronics12010234
APA StyleSeriani, S., Carrato, S., Medvet, E., Cernigoi, A., Zibai, A., & Gallina, P. (2023). A Powered Floor System with Integrated Robot Localization. Electronics, 12(1), 234. https://doi.org/10.3390/electronics12010234