

Characterization of Low-Latency Next-Generation eVTOL Communications: From Channel Modeling to Performance Evaluation




Abstract
:1. Introduction
1.1. Background and Motivation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel Model | Application | Description |
|---|---|---|
| 3D Channel [12] | WINNER II/WINNER + | 3GPP concept with altitude taken into account to fill in the gaps of 2D channel modles |
| 3D Channel on outdoor urban [13] | Urban microcells (UMi) and urban macrocells | Various measurement activities in different frequency bands and scenarios at Aalborg, Denmark |
| 5G Millimeter-Wave Bands [14] | Model of mmWave up to 100 GHz | Compared channel data with NYUSIM model to show channel efficiency and multipath effects |
1.2. Contributions
- We develop a channel model for wireless links in eVTOL communications, which include BS-to-eVTOL and eVTOL-to-eVTOL channels. In characterizing the non-stationary eVTOL channel, we consider the eVTOL moving direction, link configuration, and the speed of the eVTOL;
- We present a new method for estimating the SNR over a fast time-variant dynamic eVTOL channel by utilizing the sliding window adaptive filtering technique with the least mean square approach;
- The fading distribution that describes the widest range of fading behavior exhibited by the non-stationary eVTOL communication channel is derived. It is anticipated that the PDF presented in this paper is valuable for estimating the performance of the modern eVTOL communication links, either through computer simulations or analytically;
- We develop an optimization framework to minimize ground-to-eVTOL and eVTOL-to-eVTOL communication costs while ensuring quality-of-service constraints such as communication link capacity, reliability, and end-to-end transmission delay;
- Subsequently, we consider the commercially available eVTOL specifications and data to validate the channel model and analyze the Doppler shift and latency for the exponential acceleration and exponential deceleration velocity profiles during the takeoff and landing operation;
- Due to the non-stationary dynamic channel of the eVTOL link, it is critical to analyze the occurrence of an outage due to the fall of the SNR below the respective predetermined threshold. To this end, we analyze the outage probability and make an important observation that the outage probability increases non-linearly with the eVTOL height. It is an important performance observation for eVTOL links operating over dynamic fading conditions to identify the deep fade regions.
2. System Model and Channel Characterization
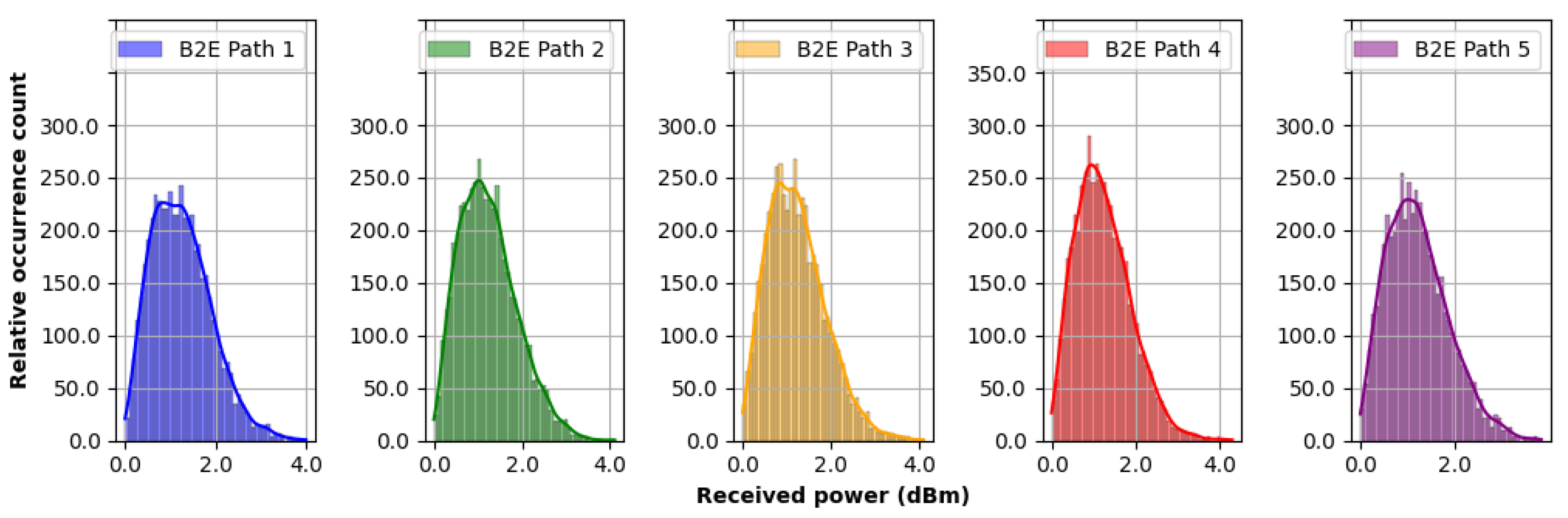
2.1. Base-Station-to-eVTOL (B2E) and eVTOL-to-eVTOL (E2E) Link Characteristics
2.2. Fading Characterization for eVTOL Communication Link
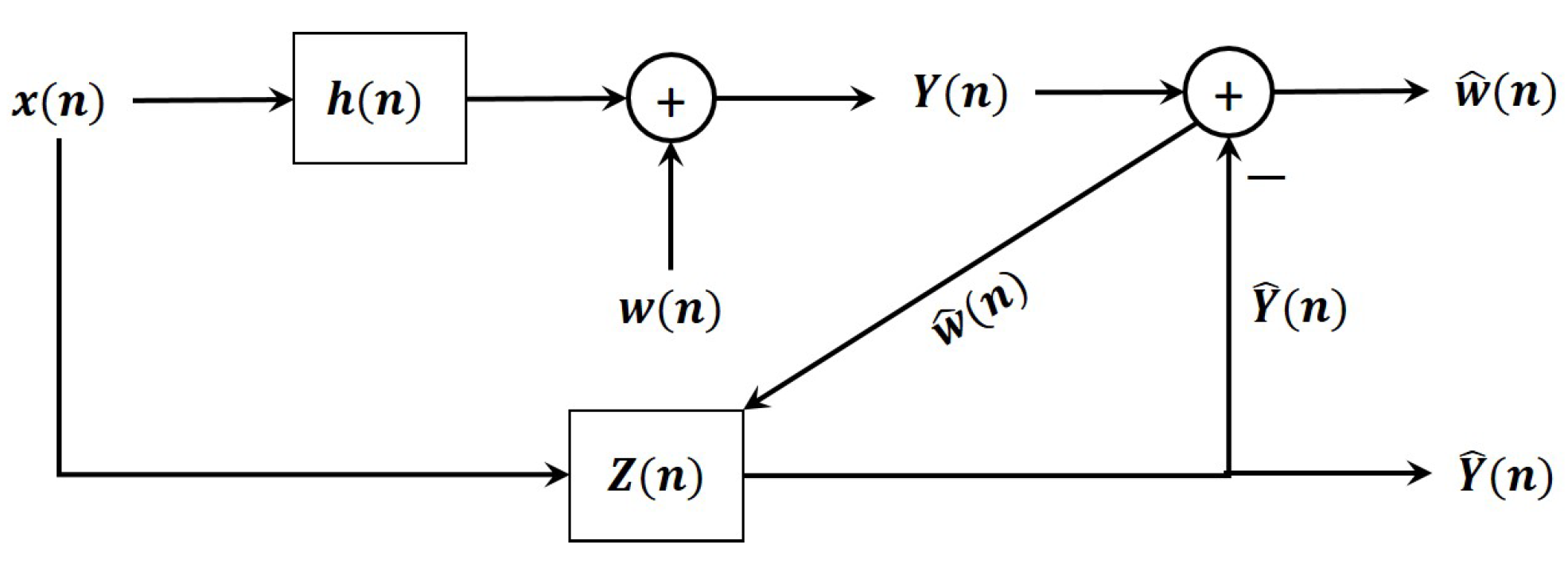
2.3. Noise and SNR Estimation
2.4. SNR Estimation
- The results show that the SNR estimation is relatively accurate with minimal bias. However, occasional spikes in the estimation error indicate instances of higher fading fluctuations;
- It can also be seen that the smaller window size can result in higher spikes in the estimation error. This can be attributed to the limited number of samples used for smoothing, which, in turn, make the estimation error more sensitive to random fluctuations. It can also be concluded that a larger window size can lead to smoother estimation error plots with reduced variations. Therefore, the choice of an appropriate window size depends on the specific requirements of the communication system, balancing the need for accurate estimation and the desired responsiveness to SNR variations.
3. Results and Discussions
| Parameter | Value |
|---|---|
| 35 dBm | |
| Packet size | 32 bytes |
| Rice factor of B2E link | dB |
| Rice factor of E2E link | dB |
| Noise spectral density [21] | dBm/Hz |
| LOS (NLOS) shadow fading standard deviation | 4 dB |
| Carrier frequency | GHz (C band) |
| Window size | 50 |
- Specifically, for eVTOLs operating in a region just above the ground BS, i.e., , the delay increases with increasing heights. This behavior can be attributed to the fact that, in a region just above the BS, the probability of forming LOS links is higher, which in turn results in a higher K factor and better performance;
- On the contrary, if eVTOL moves to a location such that and , the delay decreases with the height initially and then increases gradually with the height. This is because, in a region with lower height and and , increasing the height increases the probability of forming the LOS link and, thereby, reduces the transmission delay. However, on increasing the height further beyond a certain threshold, the path loss also increases significantly. This results in an increase in the transmission delay with increasing height. For example, with set to and set to , the transmission delay decreases with increasing the eVTOL height from 50 m to 70 m. However, increasing further results in increasing the transmission delay.
- As expected, as the height of the eVTOL increases, the outage probability increases. Moreover, the outage probability also increases with increasing outage threshold;
- Another important observation that can be inferred from the results is that, at a constant target SNR value, the outage probability increases non-linearly with the height.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B. D’Alembert (or Cauchy) Ratio Test for the Convergence of (11)
References
- Letaief, K.B.; Chen, W.; Shi, Y.; Zhang, J.; Zhang, Y.J.A. The roadmap to 6G: AI empowered wireless networks. IEEE Commun. Mag. 2019, 57, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G wireless networks: Vision, requirements, architecture, and key technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Azari, A.; Ozger, M.; Cavdar, C. Risk-aware resource allocation for URLLC: Challenges and strategies with machine learning. IEEE Commun. Mag. 2019, 57, 42–48. [Google Scholar] [CrossRef] [Green Version]
- He, R.; Ai, B.; Stüber, G.L.; Zhong, Z. Mobility model-based non-stationary mobile-to-mobile channel modeling. IEEE Trans. Wirel. Commun. 2018, 17, 4388–4400. [Google Scholar] [CrossRef]
- Simunek, M.; Fontán, F.P.; Pechac, P. The UAV low elevation propagation channel in urban areas: Statistical analysis and time-series generator. IEEE Trans. Antennas Propag. 2013, 61, 3850–3858. [Google Scholar] [CrossRef]
- Bai, L.; Huang, Z.; Cheng, X. A Non-Stationary Model with Time-Space Consistency for 6G Massive MIMO mmWave UAV Channels. IEEE Trans. Wirel. Commun. 2022, 22, 2048–2064. [Google Scholar] [CrossRef]
- Chang, H.; Wang, C.X.; Liu, Y.; Huang, J.; Sun, J.; Zhang, W.; Gao, X. A novel nonstationary 6G UAV-to-ground wireless channel model with 3-D arbitrary trajectory changes. IEEE Internet Things J. 2020, 8, 9865–9877. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, Z.; Wang, C.X.; Zhang, J.; Dang, J.; Wu, L.; Zhang, H. A novel 3D UAV channel model for A2G communication environments using AoD and AoA estimation algorithms. IEEE Trans. Commun. 2020, 68, 7232–7246. [Google Scholar] [CrossRef]
- Wang, Y.; Gorski, A.; da Silva, A.P. Development of a data-driven mobile 5g testbed: Platform for experimental research. In Proceedings of the 2021 IEEE International Mediterranean Conference on Communications and Networking (MeditCom), Athens, Greece, 7–10 September 2021; pp. 324–329. [Google Scholar]
- Arya, S.; Wang, Y. Ground-to-UAV Integrated Network: Low Latency Communication over Interference Channel. arXiv 2020, arXiv:2305.02451. [Google Scholar]
- Meinilä, J.; Kyösti, P.; Hentilä, L.; Jämsä, T.; Suikkanen, E.; Kunnari, E.; Narandžić, M. Document title: D5. 3: WINNER+ final channel models. Wirel. World Initiat. New Radio Win. 2010, 68, 119–172. [Google Scholar]
- Haneda, K.; Zhang, J.; Tan, L.; Liu, G.; Zheng, Y.; Asplund, H.; Li, J.; Wang, Y.; Steer, D.; Li, C.; et al. 5G 3GPP-like channel models for outdoor urban microcellular and macrocellular environments. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–7. [Google Scholar]
- Sun, S.; Rappaport, T.S.; Shafi, M.; Tang, P.; Zhang, J.; Smith, P.J. Propagation models and performance evaluation for 5G millimeter-wave bands. IEEE Trans. Veh. Technol. 2018, 67, 8422–8439. [Google Scholar] [CrossRef]
- Durgin Gregory D; Rappaport Theodore S, Theory of multipath shape factors for small-scale fading wireless channels. IEEE Trans. Antennas Propag. 2000, 48, 682–693. [CrossRef] [Green Version]
- Abdi, A.; Hashemi, H.; Nader-Esfahani, S. On the PDF of the sum of random vectors. IEEE Trans. Commun. 2000, 48, 7–12. [Google Scholar] [CrossRef] [Green Version]
- Bennett, W.R. Distribution of the sum of randomly phased components. Q. Appl. Math. 1948, 5, 385–393. [Google Scholar] [CrossRef] [Green Version]
- EHang Holdings Limited. Available online: https://ir.ehang.com/static-files/830a9a2c-e7e6-49f3-b4b7-7c6d388c99cb (accessed on 21 March 2023).
- Urban Air Mobility Vehicle Dataset. Available online: https://purr.purdue.edu/publications/3816/1 (accessed on 21 March 2023).
- Joby Aviation. Available online: https://ir.jobyaviation.com/ (accessed on 21 March 2023).
- Salehi, F.; Ozger, M.; Neda, N.; Cavdar, C. Ultra-Reliable Low-Latency Communication for Aerial Vehicles via Multi-Connectivity. In Proceedings of the 2022 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Grenoble, France, 7–10 June 2022; pp. 166–171. [Google Scholar]
- Andrews, L.C. Special Functions of Mathematics for Engineers; Spie Press: Bellingham, WA, USA, 1998; Volume 49. [Google Scholar]
- Adamchik, V.S.; Marichev, O.I. The algorithm for calculating integrals of hypergeometric type functions and its realization in REDUCE system. In Proceedings of the International Symposium on Symbolic and Algebraic Computation, Tokyo, Japan, 20–24 August 1990; pp. 212–224. [Google Scholar]
- The Wolfram Functions Site Wolfram Research, Inc. Available online: http://functions.wolfram.com (accessed on 25 February 2023).
- Arfken, G.B.; Weber, H.J. Mathematical methods for physicists. Am. Assoc. Phys. Teach. 1999, 67, 165–169. [Google Scholar]





















| Parameter | Description |
|---|---|
| K | K-factor |
| Carrier frequency | |
| Source antenna pattern for vertical (horizontal) polarization | |
| Receiver antenna pattern for vertical (horizontal) polarization | |
| Elevation (azimuth) angle of departure of the LOS component | |
| Elevation (azimuth) angle of arrival of the LOS component | |
| Total number of paths at time instant t for NLOS link | |
| Attenuation of the rth path | |
| Velocity of the transmitter x | |
| Velocity of the receiver y | |
| v | Relative velocity between the transmitter and the receiver |
| Cross-polarization power ratio | |
| Number of rays in the rth path | |
| Number of samples | |
| Gaussian noise at time index n | |
| Variance of the NLOS fading components | |
| Step size | |
| Length of the codeword | |
| Transmit power | |
| Bit duration | |
| Distance between the transmitter x and the receiver y |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mak, B.; Arya, S.; Wang, Y.; Ashdown, J. Characterization of Low-Latency Next-Generation eVTOL Communications: From Channel Modeling to Performance Evaluation. Electronics 2023, 12, 2838. https://doi.org/10.3390/electronics12132838
Mak B, Arya S, Wang Y, Ashdown J. Characterization of Low-Latency Next-Generation eVTOL Communications: From Channel Modeling to Performance Evaluation. Electronics. 2023; 12(13):2838. https://doi.org/10.3390/electronics12132838
Chicago/Turabian StyleMak, Bing, Sudhanshu Arya, Ying Wang, and Jonathan Ashdown. 2023. "Characterization of Low-Latency Next-Generation eVTOL Communications: From Channel Modeling to Performance Evaluation" Electronics 12, no. 13: 2838. https://doi.org/10.3390/electronics12132838
APA StyleMak, B., Arya, S., Wang, Y., & Ashdown, J. (2023). Characterization of Low-Latency Next-Generation eVTOL Communications: From Channel Modeling to Performance Evaluation. Electronics, 12(13), 2838. https://doi.org/10.3390/electronics12132838