
Design of a Four-Wheel Steering Mobile Robot Platform and Adaptive Steering Control for Manual Operation


Abstract
:1. Introduction
2. Four-Wheel Steering Robot Platform
2.1. Robot System Structure
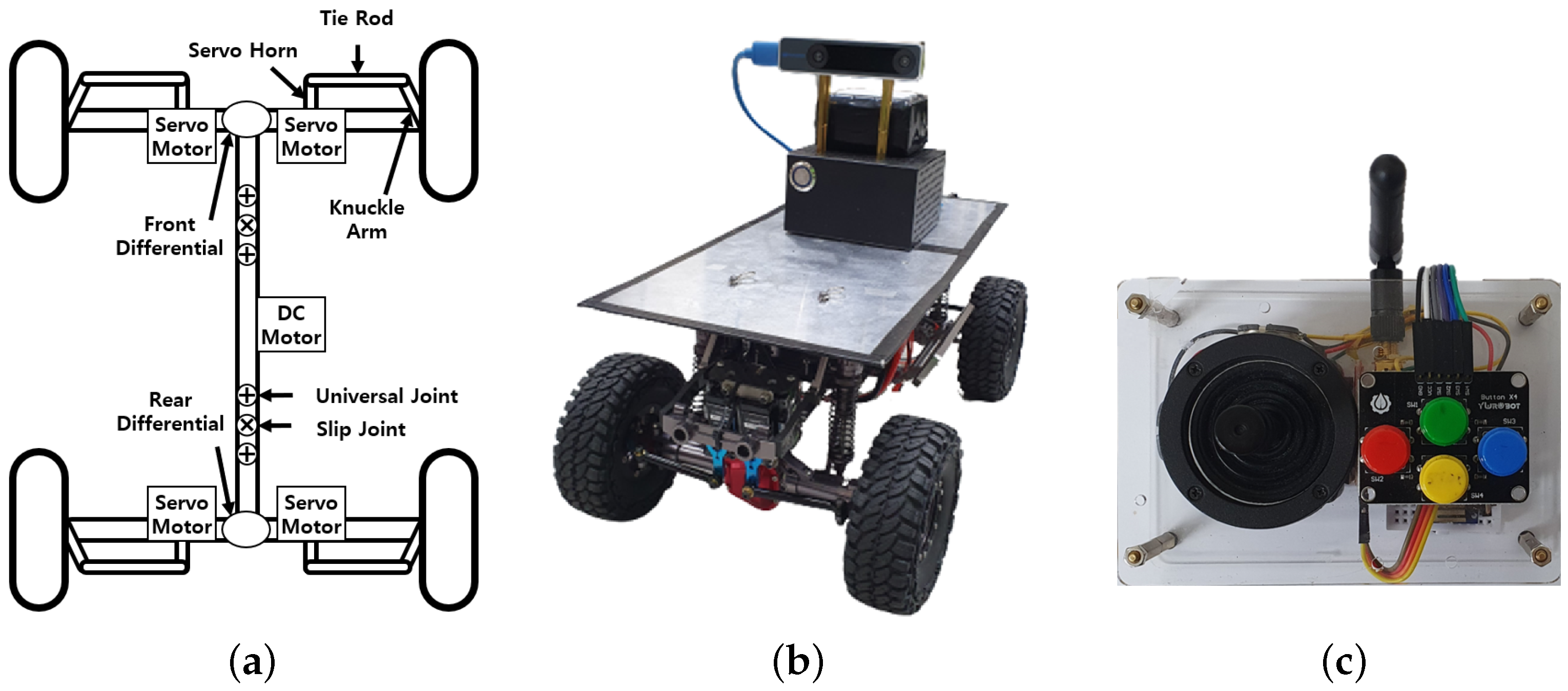
2.2. Hardware Design of Robot Platforms
2.3. Steering Angle Calibration
3. Adaptive Control of Four-Wheel Steering
4. Experiments
4.1. Steering Accuracy Evaluation
4.2. Manual Operation Evaluation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Marchuk, V.Y.; Harmash, O.; Ovdiienko, O. World trends in warehousing logistics. Intell. Logist. Supply Chain Manag. 2020, 2, 32. [Google Scholar]
- Bonkenburg, T. Robotics in logistics: A DPDHL perspective on implications and use cases for the logistics industry. DHL Cust. Solut. Innov. 2016, 1–37. [Google Scholar]
- Azadeh, K.; De Koster, R.; Roy, D. Robotized and automated warehouse systems: Review and recent developments. Transp. Sci. 2019, 53, 917–945. [Google Scholar] [CrossRef]
- Barros, R.J.; Silva Filho, J.L.; Neto, J.V.; Nascimento, T.P. An open-design warehouse mobile robot. In Proceedings of the 2020 Latin American Robotics Symposium (LARS), 2020 Brazilian Symposium on Robotics (SBR) and 2020 Workshop on Robotics in Education (WRE), Natal, Brazil, 9–12 November 2020; pp. 1–6. [Google Scholar]
- Belanche, D.; Casaló, L.V.; Flavián, C.; Schepers, J. Service robot implementation: A theoretical framework and research agenda. Serv. Ind. J. 2020, 40, 203–225. [Google Scholar] [CrossRef]
- Hajduk, M.; Koukolová, L. Trends in industrial and service robot application. Appl. Mech. Mater. 2015, 791, 161–165. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Hellmann Santos, C.; Pekkeriet, E. Agricultural robotics for field operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez-de Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Emmi, L.; Armada, M. Field robots for intelligent farms—Inhering features from industry. Agronomy 2020, 10, 1638. [Google Scholar] [CrossRef]
- Kozłowski, K.; Pazderski, D. Modeling and control of a 4-wheel skid-steering mobile robot. Int. J. Appl. Math. Comput. Sci. 2004, 14, 477–496. [Google Scholar]
- Shabalina, K.; Sagitov, A.; Magid, E. Comparative analysis of mobile robot wheels design. In Proceedings of the 2018 11th International Conference on Developments in Systems Engineering (DESE), Cambridge, UK, 2–5 September 2018; pp. 175–179. [Google Scholar]
- Adăscăliţei, F.; Doroftei, I. Practical applications for mobile robots based on mecanum wheels-a systematic survey. Rom. Rev. Precis. Mech. Opt. Mechatron. 2011, 40, 21–29. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Choi, M.W.; Park, J.S.; Lee, B.S.; Lee, M.H. The performance of independent wheels steering vehicle (4WS) applied Ackerman geometry. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 14–17 October 2008; pp. 197–202. [Google Scholar]
- Hang, P.; Chen, X. Towards autonomous driving: Review and perspectives on configuration and control of four-wheel independent drive/steering electric vehicles. Actuators 2021, 10, 184. [Google Scholar] [CrossRef]
- Hua, F.; Li, G.; Liu, F.; Liu, Y. Mechanical design of a four-wheel independent drive and steering mobile robot platform. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA), Hefei, China, 5–7 June 2016; pp. 235–238. [Google Scholar]
- Xue, H.; Tan, D.; Liu, S.; Yuan, M.; Zhao, C. Research on the Electromagnetic-Heat-Flow Coupled Modeling and Analysis for In-Wheel Motor. World Electr. Veh. J. 2020, 11, 29. [Google Scholar] [CrossRef]
- Wang, Q.; Li, R.; Zhao, Z.; Liang, K.; Xu, W.; Zhao, P. Temperature Field Analysis and Cooling Structure Optimization for Integrated Permanent Magnet In-Wheel Motor Based on Electromagnetic-Thermal Coupling. Energies 2023, 16, 1527. [Google Scholar] [CrossRef]
- Bhishikar, S.; Gudhka, V.; Dalal, N.; Mehta, P.; Bhil, S.; Mehta, A. Design and simulation of 4 wheel steering system. Int. J. Eng. Innov. Technol. 2014, 3, 351–367. [Google Scholar]
- Furukawa, Y.; Yuhara, N.; Sano, S.; Takeda, H.; Matsushita, Y. A review of four-wheel steering studies from the viewpoint of vehicle dynamics and control. Veh. Syst. Dyn. 1989, 18, 151–186. [Google Scholar] [CrossRef]
- Inoue, H.; Sugasawa, F. Comparison of feedforward and feedback control for 4WS. Veh. Syst. Dyn. 1993, 22, 425–436. [Google Scholar] [CrossRef]
- Sano, S.; Furukawa, Y.; Shiraishi, S. Four wheel steering system with rear wheel steer angle controlled as a function of sterring wheel angle. SAE Trans. 1986, 95, 880–893. [Google Scholar]
- Tun, T.T.; Huang, L.; Mohan, R.E.; Matthew, S.G.H. Four-wheel steering and driving mechanism for a reconfigurable floor cleaning robot. Autom. Constr. 2019, 106, 102796. [Google Scholar] [CrossRef]
- Ye, Y.; He, L.; Zhang, Q. Steering control strategies for a four-wheel-independent-steering bin managing robot. IFAC PapersOnLine 2016, 49, 39–44. [Google Scholar] [CrossRef]
- Fnadi, M.; Plumet, F.; Benamar, F. Model predictive control based dynamic path tracking of a four-wheel steering mobile robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), The Venetian Macao, Macau, 4–8 November 2019; pp. 4518–4523. [Google Scholar]
- Wu, Y.; Li, B.; Zhang, N.; Du, H.; Zhang, B. Rear-steering based decentralized control of four-wheel steering vehicle. IEEE Trans. Veh. Technol. 2020, 69, 10899–10913. [Google Scholar] [CrossRef]
- Warth, G.; Frey, M.; Gauterin, F. Usage of the cornering stiffness for an adaptive rear wheel steering feedforward control. IEEE Trans. Veh. Technol. 2018, 68, 264–275. [Google Scholar] [CrossRef]
- Zhao, W.; Qin, X.; Wang, C. Yaw and lateral stability control for four-wheel steer-by-wire system. IEEE/ASME Trans. Mechatron. 2018, 23, 2628–2637. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Size (L × W × H) | 440 × 240 × 180 mm |
| Weight | 3.8 kg |
| Wheel radius | 110 mm |
| Steering range | ∼30 |
| Maximum speed | 1.5 m/s |
| Minimum turning radius | 501 mm |
| Communication interface | ZigBee |
| Component Name | Specification |
|---|---|
| Arduino Nano 33 IoT | 32 bit microcontroller |
| ESC | Input 2–3 LiPo, continuous current 80 A |
| DC motor | 18,300 rpm, 0.034 Nm |
| Servo motor | 12.0 kg × cm |
| ZigBee module | ISM 2.4 GHz, 250 Kbps |
| LiPo battery | 11.1 V, 6000 mAh |
| RC | RC | RC | RC | RC | |
|---|---|---|---|---|---|
| Radius (m) | 0.510 | 0.963 | 0.963 | 0.734 | 0.734 |
| Rotation | CCW | CCW | CCW | CW | CW |
| () | 20.0 | 0.0 | 20.0 | −5.6 | −16.4 |
| () | 15.1 | 0.0 | 17.1 | −6.9 | −20.0 |
| () | −20.0 | −20.0 | 0.0 | 16.4 | 5.6 |
| () | −15.1 | −17.1 | 0.0 | 20.0 | 6.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bae, B.; Lee, D.-H. Design of a Four-Wheel Steering Mobile Robot Platform and Adaptive Steering Control for Manual Operation. Electronics 2023, 12, 3511. https://doi.org/10.3390/electronics12163511
Bae B, Lee D-H. Design of a Four-Wheel Steering Mobile Robot Platform and Adaptive Steering Control for Manual Operation. Electronics. 2023; 12(16):3511. https://doi.org/10.3390/electronics12163511
Chicago/Turabian StyleBae, Beomsu, and Dong-Hyun Lee. 2023. "Design of a Four-Wheel Steering Mobile Robot Platform and Adaptive Steering Control for Manual Operation" Electronics 12, no. 16: 3511. https://doi.org/10.3390/electronics12163511
APA StyleBae, B., & Lee, D. -H. (2023). Design of a Four-Wheel Steering Mobile Robot Platform and Adaptive Steering Control for Manual Operation. Electronics, 12(16), 3511. https://doi.org/10.3390/electronics12163511