



Underwater AUV Navigation Dataset in Natural Scenarios



Abstract
:1. Introduction
- Presentation of a substantial amount of underwater high-precision navigation data, covering approximately 147 km;
- Collection of data from real scenarios in three different regions, encompassing diverse trajectories and time spans;
- Introduction of navigation challenges in underwater environments and the proposed methods based on dead reckoning and collaborative localization, evaluated against our benchmark.
2. Related Work
2.1. Underwater Navigation Methods
2.2. Underwater Natural Scene Datasets
2.3. Underwater Navigation Datasets
3. Data Acquisition
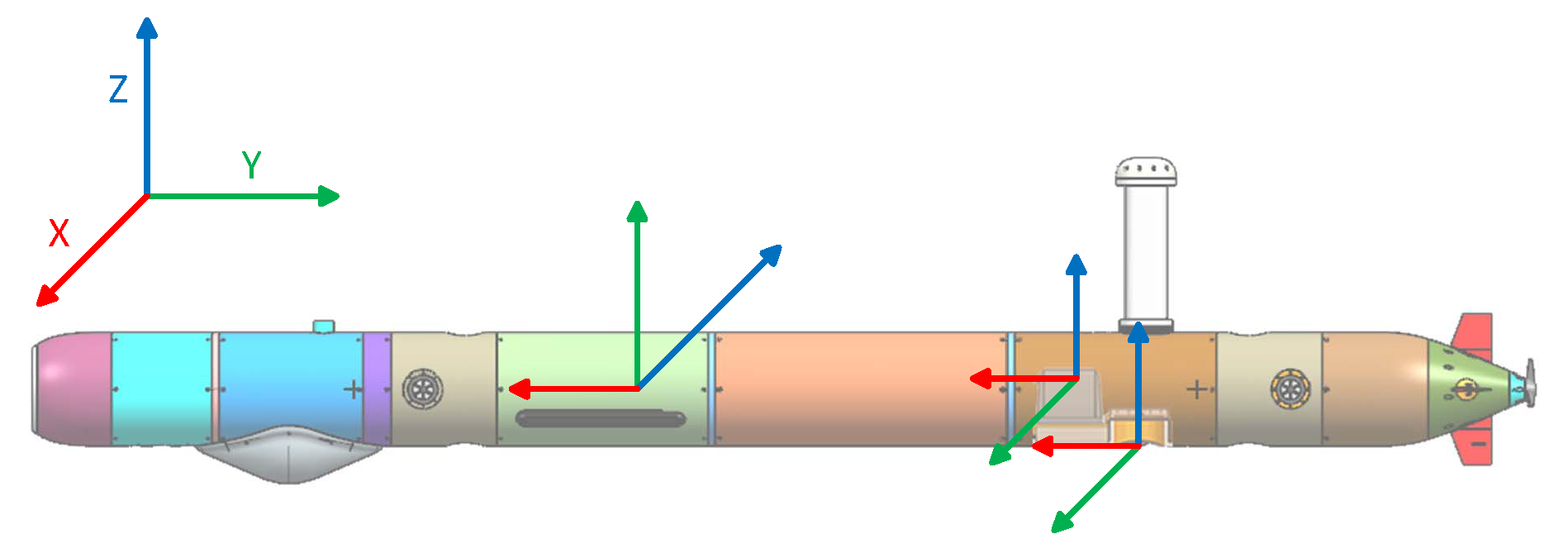
3.1. Platform
3.2. Sensor
3.3. Data Collection
3.4. Synchronization
4. Dataset
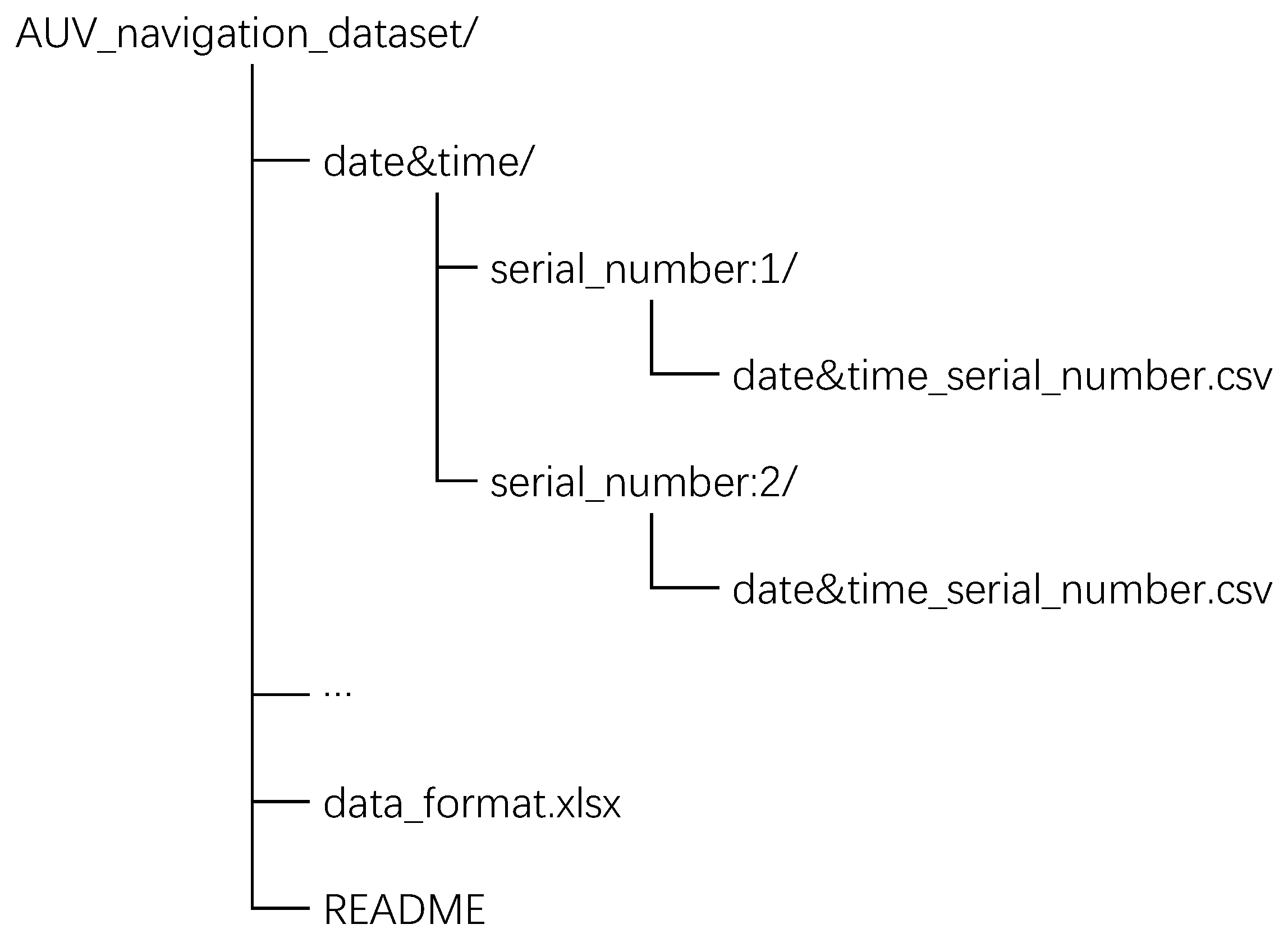
4.1. Data Structures
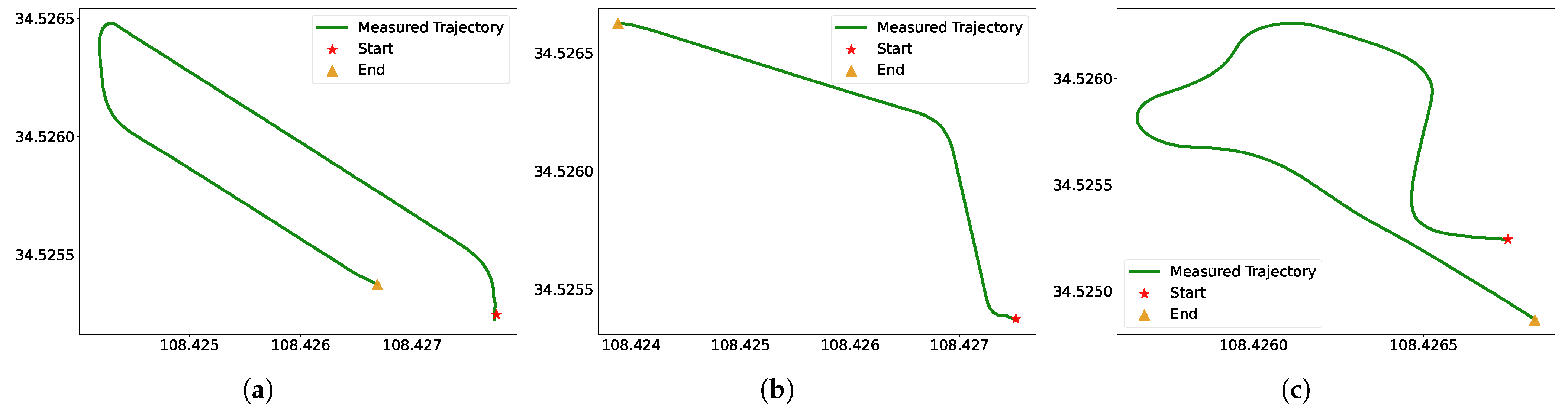
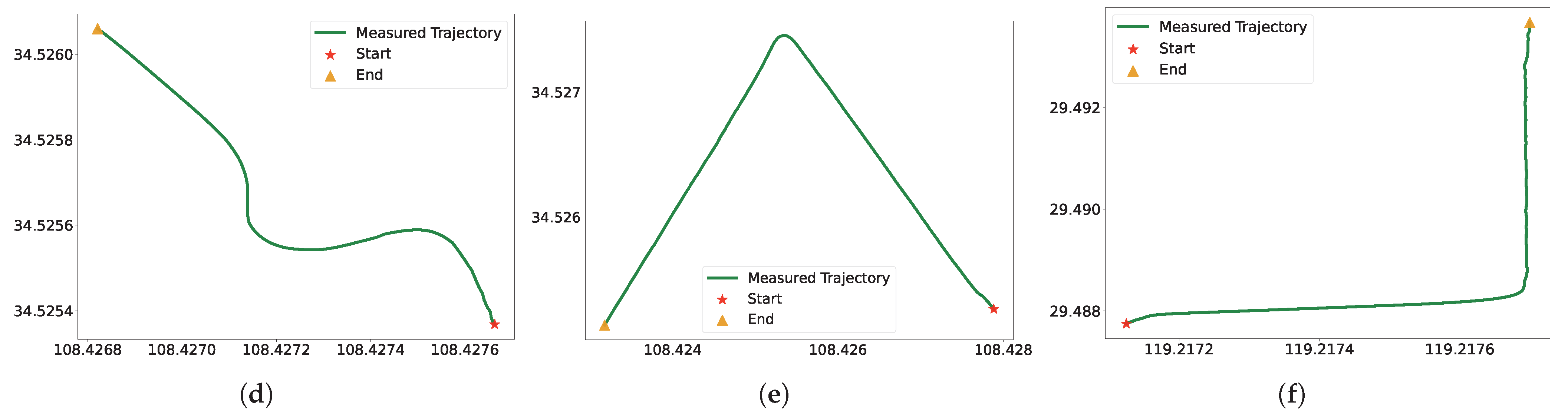
4.2. Testing
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AUV | Autonomous underwater vehicle |
| DVL | Doppler Velocity Log |
| SLAM | Simultaneous localization and mapping |
| DGPS | Differential Global Positioning Systems |
| SINS | Strapdown inertial navigation systems |
| INS | Inertial navigation systems |
| IMU | Inertial measurement unit |
| TDOA | Time difference of arrival |
References
- Lapierre, L.; Zapata, R.; Lepinay, P.; Ropars, B. Karst exploration: Unconstrained attitude dynamic control for an AUV. Ocean Eng. 2021, 219, 108321. [Google Scholar] [CrossRef]
- Yan, J.; Ban, H.; Luo, X.; Zhao, H.; Guan, X. Joint Localization and Tracking Design for AUV With Asynchronous Clocks and State Disturbances. IEEE Trans. Veh. Technol. 2019, 68, 4707–4720. [Google Scholar] [CrossRef]
- Liu, R.; Liu, F.; Liu, C.; Zhang, P. Modified Sage-Husa Adaptive Kalman Filter-Based SINS/DVL Integrated Navigation System for AUV. J. Sens. 2021, 2021, 9992041. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Harris, Z.J.; Whitcomb, L.L. Cooperative acoustic navigation of underwater vehicles without a DVL utilizing a dynamic process model: Theory and field evaluation. J. Field Robot. 2021, 38, 700–726. [Google Scholar] [CrossRef]
- Bucci, A.; Zacchini, L.; Franchi, M.; Ridolfi, A.; Allotta, B. Comparison of feature detection and outlier removal strategies in a mono visual odometry algorithm for underwater navigation. Appl. Ocean Res. 2022, 118, 102961. [Google Scholar] [CrossRef]
- Franchi, M.; Ridolfi, A.; Zacchini, L. 2D Forward Looking SONAR in Underwater Navigation Aiding: An AUKF-based strategy for AUVs*. IFAC-Papersonline 2020, 53, 14570–14575. [Google Scholar] [CrossRef]
- Zhou, W.H.; Zhu, D.M.; Shi, M.; Li, Z.X.; Duan, M.; Wang, Z.Q.; Zhao, G.L.; Zheng, C.D. Deep images enhancement for turbid underwater images based on unsupervised learning. Comput. Electron. Agric. 2022, 202, 107372. [Google Scholar] [CrossRef]
- Su, R.; Zhang, D.; Li, C.; Gong, Z.; Venkatesan, R.; Jiang, F. Localization and Data Collection in AUV-Aided Underwater Sensor Networks: Challenges and Opportunities. IEEE Netw. 2019, 33, 86–93. [Google Scholar] [CrossRef]
- Howe, J.A.; Husum, K.; Inall, M.E.; Coogan, J.; Luckman, A.; Arosio, R.; Abernethy, C.; Verchili, D. Autonomous underwater vehicle (AUV) observations of recent tidewater glacier retreat, western Svalbard. Mar. Geol. 2019, 417, 106009. [Google Scholar] [CrossRef]
- Gallagher, D.G.; Manley, R.J.; Hughes, W.W.; Pilcher, A.M. Development of an enhanced underwater navigation capability for military combat divers. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Dzikowicz, B.R.; Yoritomo, J.Y.; Heddings, J.T.; Hefner, B.T.; Brown, D.A.; Bachand, C.L. Demonstration of Spiral Wavefront Navigation on an Unmanned Underwater Vehicle. IEEE J. Ocean. Eng. 2023, 48, 297–306. [Google Scholar] [CrossRef]
- Huet, C.; Mastroddi, F. Autonomy for Underwater Robots—A European Perspective. Auton. Robot. 2016, 40, 1113–1118. [Google Scholar] [CrossRef]
- Bil, C. Concept Evaluation of a Bi-Modal Autonomous System. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023. [Google Scholar] [CrossRef]
- Li, H.; Zhu, J.; Deng, J.; Guo, F.; Zhang, N.; Sun, J.; Hou, X. Underwater active polarization descattering based on a single polarized image. Opt. Express 2023, 31, 21988–22000. [Google Scholar] [CrossRef]
- Franchi, M.; Ridolfi, A.; Pagliai, M. A forward-looking SONAR and dynamic model-based AUV navigation strategy: Preliminary validation with FeelHippo AUV. Ocean Eng. 2020, 196, 106770. [Google Scholar] [CrossRef]
- Jin, B.; Xu, X.; Zhu, Y.; Zhang, T.; Fei, Q. Single-Source Aided Semi-Autonomous Passive Location for Correcting the Position of an Underwater Vehicle. IEEE Sens. J. 2019, 19, 3267–3275. [Google Scholar] [CrossRef]
- Jorgensen, E.K.; Fossen, T.I.; Bryne, T.H.; Schjolberg, I. Underwater Position and Attitude Estimation Using Acoustic, Inertial, and Depth Measurements. IEEE J. Ocean. Eng. 2020, 45, 1450–1465. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, X.; Wang, J.; Wang, H. Pseudo-3D Vision-Inertia Based Underwater Self-Localization for AUVs. IEEE Trans. Veh. Technol. 2020, 69, 7895–7907. [Google Scholar] [CrossRef]
- Manderson, T.; Gamboa Higuera, J.C.; Wapnick, S.; Tremblay, J.F.; Shkurti, F.; Meger, D.; Dudek, G. Vision-Based Goal-Conditioned Policies for Underwater Navigation in the Presence of Obstacles. arXiv 2020, arXiv:2006.16235. [Google Scholar]
- Singh, D.; Valdenegro-Toro, M. The Marine Debris Dataset for Forward-Looking Sonar Semantic Segmentation. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Virtual, 11–17 October 2021; pp. 3734–3742. [Google Scholar]
- Zhou, Y.; Chen, S.; Wu, K.; Ning, M.; Chen, H.; Zhang, P. SCTD 1.0:Sonar Common Target Detection Dataset. Comput. Sci. 2021, 48, 334–339. [Google Scholar] [CrossRef]
- Zhang, P.; Tang, J.; Zhong, H.; Ning, M.; Liu, D.; Wu, K. Self-Trained Target Detection of Radar and Sonar Images Using Automatic Deep Learning. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Huo, G.; Wu, Z.; Li, J. Underwater Object Classification in Sidescan Sonar Images Using Deep Transfer Learning and Semisynthetic Training Data. IEEE Access 2020, 8, 47407–47418. [Google Scholar] [CrossRef]
- Chang, L.; Song, H.; Li, M.; Xiang, M. UIDEF: A real-world underwater image dataset and a color-contrast complementary image enhancement framework. ISPRS J. Photogramm. Remote Sens. 2023, 196, 415–428. [Google Scholar] [CrossRef]
- Yin, X.; Liu, X.; Liu, H. FMSNet: Underwater Image Restoration by Learning from a Synthesized Dataset. In Proceedings of the Artificial Neural Networks and Machine Learning—ICANN 2021, Bratislava, Slovakia, 14–17 September 2021; Farkaš, I., Masulli, P., Otte, S., Wermter, S., Eds.; Springer: Cham, Switzerland, 2021; pp. 421–432. [Google Scholar]
- Chen, L.; Dong, J.; Zhou, H. Class balanced underwater object detection dataset generated by class-wise style augmentation. arXiv 2021, arXiv:2101.07959. [Google Scholar]
- Polymenis, I.; Haroutunian, M.; Norman, R.; Trodden, D. Artificial Underwater Dataset: Generating Custom Images Using Deep Learning Models. In Proceedings of the ASME 2022 41st International Conference on Ocean, Offshore and Arctic Engineering, Hamburg, Germany, 5–10 June 2022. [Google Scholar] [CrossRef]
- Boittiaux, C.; Dune, C.; Ferrera, M.; Arnaubec, A.; Marxer, R.; Matabos, M.; Audenhaege, L.V.; Hugel, V. Eiffel Tower: A deep-sea underwater dataset for long-term visual localization. Int. J. Robot. Res. 2023, 02783649231177322. [Google Scholar] [CrossRef]
- Cheng, Y.; Jiang, M.; Zhu, J.; Liu, Y. Are We Ready for Unmanned Surface Vehicles in Inland Waterways? The USVInland Multisensor Dataset and Benchmark. IEEE Robot. Autom. Lett. 2021, 6, 3964–3970. [Google Scholar] [CrossRef]
- Song, Y.; Qian, J.; Miao, R.; Xue, W.; Ying, R.; Liu, P. HAUD: A High-Accuracy Underwater Dataset for Visual-Inertial Odometry. In Proceedings of the 2021 IEEE Sensors, 31 October–3 November 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Luczynski, T.; Scharff Willners, J.; Vargas, E.; Roe, J.; Xu, S.; Cao, Y.; Petillot, Y.; Wang, S. Underwater inspection and intervention dataset. arXiv 2021, arXiv:2107.13628. [Google Scholar] [CrossRef]
- Miller, M.; Chung, S.J.; Hutchinson, S. The Visual–Inertial Canoe Dataset. Int. J. Robot. Res. 2018, 37, 13–20. [Google Scholar] [CrossRef]
- Panetta, K.; Kezebou, L.; Oludare, V.; Agaian, S. Comprehensive Underwater Object Tracking Benchmark Dataset and Underwater Image Enhancement With GAN. IEEE J. Ocean. Eng. 2022, 47, 59–75. [Google Scholar] [CrossRef]
- Mallios, A.; Vidal, E.; Campos, R.; Carreras, M. Underwater caves sonar data set. Int. J. Robot. Res. 2017, 36, 1247–1251. [Google Scholar] [CrossRef]
- Krasnosky, K.; Roman, C.; Casagrande, D. A bathymetric mapping and SLAM dataset with high-precision ground truth for marine robotics. Int. J. Robot. Res. 2022, 41, 12–19. [Google Scholar] [CrossRef]
- Ferrera, M.; Creuze, V.; Moras, J.; Trouvé-Peloux, P. AQUALOC: An underwater dataset for visual–inertial–pressure localization. Int. J. Robot. Res. 2019, 38, 1549–1559. [Google Scholar] [CrossRef]
- Li, Y.; Sun, Y.; Ren, Q.; Li, S. AUV-Aided Data Collection Considering Adaptive Ocean Currents for Underwater Wireless Sensor Networks. China Commun. 2023, 20, 356–367. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The KITTI dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef]
- Wang, C.; Cheng, C.; Yang, D.; Pan, G.; Zhang, F. AUV planning and calibration method considering concealment in uncertain environments. Front. Mar. Sci. 2023, 10, 1228306. [Google Scholar] [CrossRef]
- Zhai, W.; Wu, J.; Chen, Y.; Jing, Z.; Sun, G.; Hong, Y.; Fan, Y.; Fan, S. Research on Underwater Navigation and Positioning Method Based on Sea Surface Buoys and Undersea Beacons. In Proceedings of the China Satellite Navigation Conference (CSNC) 2020 Proceedings, Chengdu, China, 22–25 November 2020; Sun, J., Yang, C., Xie, J., Eds.; Springer: Singapore, 2020. Volume III. pp. 390–404. [Google Scholar]
- Wang, J.; Zhang, T.; Jin, B.; Zhu, Y.; Tong, J. Student’s t-Based Robust Kalman Filter for a SINS/USBL Integration Navigation Strategy. IEEE Sens. J. 2020, 20, 5540–5553. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Parameter | Performance | Coordinate System |
|---|---|---|---|
| AUV | Rated depth | 100 m | Forward, up, right |
| Weight | 200 kg | ||
| Size | 10.5 × 1.06 ft | ||
| Maximum speed | 8 Kn | ||
| Inertial sensor | Heading alignment accuracy | Forward, left, up | |
| Gyro zero deviation stability | ≤0.01/h | ||
| Accelerometer zero offset stability | ≤30 μg (1) | ||
| DVL | Frequency | 300 kHz | Forward, left, up |
| Velocity accuracy | 0.5% ± 0.3 cm/s | ||
| Altitude | 3–200 m | ||
| Depth sensor | Pressure range | 0–5 Pa | N.A. |
| Output range | 4 V ± 1% | ||
| Output zero point | 1 V ± 1% of span | ||
| Repeatability | range percent |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Cheng, C.; Yang, D.; Pan, G.; Zhang, F. Underwater AUV Navigation Dataset in Natural Scenarios. Electronics 2023, 12, 3788. https://doi.org/10.3390/electronics12183788
Wang C, Cheng C, Yang D, Pan G, Zhang F. Underwater AUV Navigation Dataset in Natural Scenarios. Electronics. 2023; 12(18):3788. https://doi.org/10.3390/electronics12183788
Chicago/Turabian StyleWang, Can, Chensheng Cheng, Dianyu Yang, Guang Pan, and Feihu Zhang. 2023. "Underwater AUV Navigation Dataset in Natural Scenarios" Electronics 12, no. 18: 3788. https://doi.org/10.3390/electronics12183788
APA StyleWang, C., Cheng, C., Yang, D., Pan, G., & Zhang, F. (2023). Underwater AUV Navigation Dataset in Natural Scenarios. Electronics, 12(18), 3788. https://doi.org/10.3390/electronics12183788