1. Introduction
As global power consumption continues to rise while conventional fossil fuel resources dwindle, there is a growing need to transition to renewable energy sources (RESs) in order to meet increasing demand and reduce CO
2 emissions [
1]. Among the established and widely recognized RESs, solar and wind resources in the form of photovoltaic (PV) and wind turbine generation have emerged as prominent solutions [
2,
3], followed by sea wave energy, which is abundant in oceans and has not been fully utilized. However, the intermittent characteristics of solar, wind, and ocean energy sources prevent them from providing a consistent and reliable energy supply to meet the demand. This volatility also poses challenges in maintaining the balance between energy generation and consumption. Furthermore, they degrade the overall reliability and stability of the connected power systems [
4]. A frequently utilized method to improve stability and flexibility involves incorporating energy storage systems (ESSs).
Another possible approach that can work in parallel with RESs is the use of bioenergy obtained from hazardous environmental waste generated by current living habits. This strategy entails the transformation of waste materials into bioenergy and blending it with RESs and ESSs to satisfy demand. By putting this approach into practice, waste generation is decreased while simultaneously fostering a long-term strategy for reaching net-zero emissions of greenhouse gases. Although bioenergy cannot fulfill the global demand alone, it can be used with RESs and ESSs to construct sustainable microgrids in remote farms or towns. This integration will allow remote communities and farms to meet their energy demand while at the same time alleviating hazardous waste [
5].
Organic and agricultural biodegradable trash may be gathered and converted into fuel for biogas and biodiesel production units. The anaerobic digestion of biodegradable substances such as animal waste, agricultural waste, food waste, and sewage produces biogas, which consists of methane (CH
4), carbon dioxide (CO
2), and hydrogen sulfide (H
2S) [
6]. The biogas produced can be used as fuel in a biogas turbine generator (BGTG) to generate electrical power [
7]. Biodiesel is a sustainable fuel made from vegetable oils and animal fats using a process known as transesterification. Biodiesel is a biodegradable fuel that does not include toxic ingredients such as sulfur or benzene [
8]. The biodiesel produced can be utilized as a fuel for a biodiesel turbine generator (BDEG) to produce electricity [
9,
10]. In addition, wastewater and rainwater could be collected and used to power a micro-hydro turbine generator (MHTG) after it is cleaned and filtered [
11]. Finally, a biomass combined heat and power unit (BCHP) could generate electricity using agricultural wastes and appropriately processed non-recycled waste materials [
12].
The major issues faced by interconnected or isolated microgrids that consist of bioenergy or conventional units and are relevant to current power systems center around reducing voltage and frequency deviations from the system’s nominal values. These variations occur because of the unpredictable nature of RESs and changes in consumer demand profiles brought on by contemporary living. Any deviations from the nominal values may cause equipment damage or compromise the quality of the electricity produced. Voltage deviations can arise due to changes in the load power factor. Automatic voltage regulators (AVRs) are used to avoid such behavior and keep the terminal voltage within operational limits. AVRs are used in power plants, especially on synchronous generators, with the primary goal of keeping the voltage at its nominal value [
13,
14]. Load frequency control (LFC) is used in the power generation industry to address and mitigate frequency aberrations while maintaining a supply and demand balance. LFC is a mechanism that regulates the power output to ensure that the frequency of the electrical system does not deviate from the acceptable limits. This is performed by monitoring the frequency and adjusting power generation accordingly. By implementing ESSs or hybrid energy storage systems (H-ESSs) and designing better controllers, it is possible to further mitigate frequency and voltage aberrations.
Over the last few decades, academics have investigated various control solutions to handle LFC in power systems of differing scales and technologies, isolated or interconnected. In [
15], a two-area system with a HVDC link and a time delay was taken into consideration. The LFC of the linked system was carried out using a distributed-order proportional–integral–derivative (DOPID) controller. In [
16], a model predictive controller was used for the LFC of a two-area interconnected system consisting of a PV and thermal unit. Reference [
17] introduced a fuzzy PID controller with a fractional integrator and filter (PI
λDF) for the LFC of a three-area system. The authors in [
18] conducted a stability analysis of a LFC system, consisting of a thermal unit, demand response control and an electric vehicle aggregator. To conduct a delay-dependent stability analysis of the LFC and determine the stability zone, an improved Lyapunov–Krasovskii functional (LKF) was employed. The LKF incorporated time-varying delays by utilizing linear matrix inequalities. A two-area interconnected power system was studied in [
19]. The authors utilized a PI/PD dual-mode controller for frequency regulation.
The current studies on LFC in isolated or interconnected microgrids encompass an array of methodologies and techniques. A PID controller tuned via the particle swarm optimization–gravitational search algorithm (PSO-GSA) was implemented for an islanded microgrid in [
20]. The study included the following generating units: a PV unit, diesel generator, and wind turbine generator. In addition, the proposed microgrid incorporated a fuel cell, an aqua electrolyzer, a battery energy storage system, and a flywheel energy storage system. However, the proposed system did not consider any bioenergy units and the PID controller was implemented in an isolated microgrid. The authors in [
9] utilized a filtered fractional-order proportional–derivative (FOPDF) controller in series with a one plus fractional-order proportional–integral (1+FOPI) controller for an isolated microgrid consisting of diverse bioenergy units, RESs, a battery energy storage system, an aqua electrolyzer, and a fuel cell. Yet, a H-ESS was not considered and the proposed controller was applied to an isolated microgrid. In [
21], a combined fractional and integer-order master–slave controller was suggested for the LFC of two-area interconnected microgrids. The first microgrid consisted of a diesel engine generator, a wind turbine generator, an aqua electrolyzer, and a fuel cell. The second microgrid consisted of a PV unit and a diesel engine generator. In addition, electric vehicles have been considered in both microgrids. However, the study did not include a H-ESS or a multisource configuration for microgrids. A PID controller for an isolated renewable microgrid was proposed in reference [
1]. The study included only a battery energy storage system, and the frequency deviation was studied for an isolated microgrid. Reference [
22] employed a robust observer sliding mode controller for three-area interconnected microgrids. Each area comprised a non-reheat power plant, and the first and second included a wind turbine generator. However, a multi-source interconnected system with a H-ESS was not considered. In reference [
23], a proportional–integral (PI) controller was implemented in an isolated microgrid. The microgrid consisted of various sources, yet it did not incorporate any bioenergy units. In reference [
24], a fuzzy PID controller was applied to a microgrid with an energy storage system and a reheat thermal power plant. However, the controller was applied to an isolated microgrid without incorporating any bioenergy units.
A fractional-order proportional–integral–derivative (FOPID) controller, tuned via cohort intelligence optimization, was proposed in [
25] for the frequency regulation of a single-area microgrid and two-area interconnected microgrids. The microgrids consisted of a distributed energy system and a thermal unit. The authors in [
26] proposed the symbiotic organism search algorithm for the tuning of a FOPID controller in two-area interconnected microgrids. The proposed system included a hybrid energy storage unit, renewable energy sources and two conventional units. Reference [
27] proposed a fuzzy FOPID controller for a single-area microgrid consisting of a H-ESS, RES, and a diesel generation unit. However, the performance of the fractional-order controllers in multi-source or multi-area microgrids was not tested in any of the three aforementioned studies. In [
28], a fractional-order PI controller cascaded with a fractional-order tilt-derivative (TD
μ) controller was implemented for a single-area microgrid, comprising a thermal unit, wind power plant, and photovoltaic power plant. In addition, an ESS was considered in the system, while the cascaded controller parameters were optimized using the kidney-inspired algorithm. However, the proposed system considered only one conventional unit without including any bioenergy units, multi-sourced microgrids, or a H-ESS. An adaptive fuzzy FOPD–FOPI controller was implemented in [
29] for a standalone microgrid. Although the study considered RESs, a H-ESS, and a diesel engine generator, it did not incorporate any bioenergy units or diverse generation units.
From the presented studies, it is evident that the majority incorporate an integer PID or PI controller in isolated microgrids with RESs. A small number of them implement a H-ESS or bioenergy units. The studies of interconnected microgrids consist of two- or three-area systems, without considering multi-source generation. A small fraction of them incorporate bioenergy units and fractional-order controllers.
However, just as power systems evolve, similar evolution must occur in the controllers employed within these systems. This implies the need to develop new controllers and tuning methods aimed at enhancing the performance and robustness of the controlled systems. In view of the aforementioned, a new controller is proposed, tuned via the newly introduced coot optimization algorithm, for the frequency regulation of a three-area interconnected multi-sourced system containing only sustainable units, RESs and a different H-ESS in each area. The current study is an extended version of the conference paper that was presented in HAICTA 2022 [
9].
The proposed study brings forth the following notable contributions:
A proficient scheme of three multi-source interconnected microgrids.
The incorporation of bioenergy units, RESs, and H-ESSs.
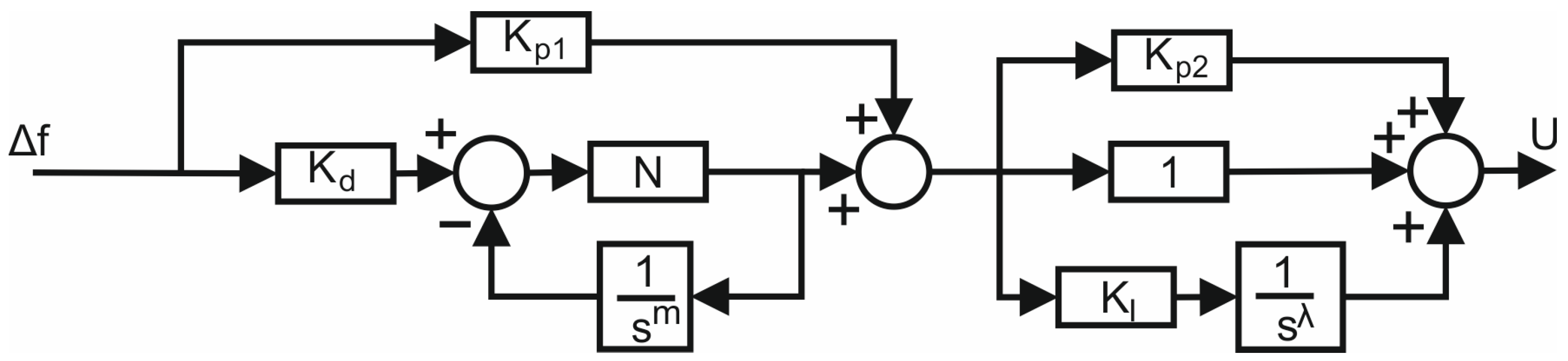
A comparison of the proposed FOPDF-(1+FOPI) controller with the integer-order PDF-(1+PI), FOTDF-(1+TI), and PIDF controllers.
The utilization of the coot optimization algorithm (COA) for tuning the controllers’ parameters.
An evaluation of the controllers’ performance for the simultaneous penetration of RESs in all areas.
The ability of the controllers to effectively attenuate noise injected into the area control error channels of the system.
The remainder of the paper is structured as follows:
Section 2 outlines and analyzes the microgrids under study;
Section 3 presents the controllers considered; next, the COA is described; subsequently, the results are presented and discussed, followed by the conclusion of the paper.
4. Coot Optimization Algorithm
Based on the observation of coots swimming together, researchers Iraj Naruei and Farshid Keynia [
33] developed a swarm-based metaheuristic optimization algorithm called coot optimization algorithm. The algorithm takes advantage of the collective behavior of coots and applies it to solve complex optimization problems.
Coots move in a chain formation, led by a group of leaders, to their chosen location, which is generally a food supply. The COA is modeled after this behavior and includes four separate movements that coots make on the water’s surface: (i) random movement, (ii) chain movement, (iii) position modification dependent on the leaders, and (iv) leaders directing the group to the best location. The search area is first filled with a random population by the COA. The population is then subjected to repeated evaluations of the objective function up until the maximum number of iterations is attained. The ITAE criterion is used as the objective function to be minimized, as follows:
The initial population is generated by using the following expression:
where
CootPos stands for the coot position,
I stands for the coot’s index number,
d stands for search space dimension, and
ub and
lb stand for the search space’s upper and lower limits. The fitness of each coot is assessed once the initial population is produced by estimating the objective function. The COA then executes the four distinct moves. Equation (21) describes the first movement, which consists of the coot traveling toward a place that is randomly selected within the search space.
The introduction of the random movement is essential in preventing the algorithm from becoming trapped in local optima. When the algorithm falls within a local optimum area, the random movement enables the agents (coots) to leave this region and explore other regions within the search space. This way, the probability of finding better solutions is increased. The calculation of the new position is derived from Equation (22):
where
A = 1-iter/Max_iter and
R2 is an arbitrary value between 0 and 1. The COA determines the average location of two coots using the following formula in order to carry out chain movement:
where
CootPos(
i—−1) stands in for the second coot. The third COA movement involves modifying the position in accordance with the group leaders. A leader is picked in this movement using Equation (24), where
i is the index number of the present coot,
NL is the number of leaders, and
K is the index number of the leader:
The coot moves toward the leader’s location by applying the following expression to the leader with the index number,
K:
where
CootPos is the current position of the coot,
LeaderPos(
K) is the position of the chosen leader,
R1 is a random number between 0 and 1, and
R is an arbitrary number between −1 and 1. Equation (25) modifies the coot’s position to be closer to the leader’s position, introducing some randomness to promote exploration within the search space. In the last movement of the algorithm, the group leaders update their position toward the optimal area by using the following formula:
where
B is determined by
B = 2-iter/Max_iter,
gBest is the best location ever found,
R3 and
R4 are arbitrary numbers between 0 and 1,
R is an arbitrary number between −1 and 1, and
R is a random number between −1 and 1.
Formula (26) is used to investigate and look for better positions close to the leader’s present position. The introduction of the term B∗R3 enables the algorithm to concurrently explore and exploit the search space by allowing greater random movements to be carried out. Additionally, the term cos(2πR) is used to examine the area surrounding the best coot location with varied radiuses in an effort to find possible superior positions nearby.
To maintain the random nature of the algorithm, movements are chosen randomly.
Figure 6 illustrates the COA methodology, offering a comprehensive overview of the different steps it encompasses. In this proposed approach, the controller’s parameters represent the positions of coots, and their desired destination, expressed via the objective function in Equation (19), corresponds to a food source. The algorithm commences by randomly generating a population of coots and computing the objective function’s value for each coot. Subsequently, the process outlined in
Figure 6 is executed repeatedly until the maximum number of iterations is attained.
6. Conclusions
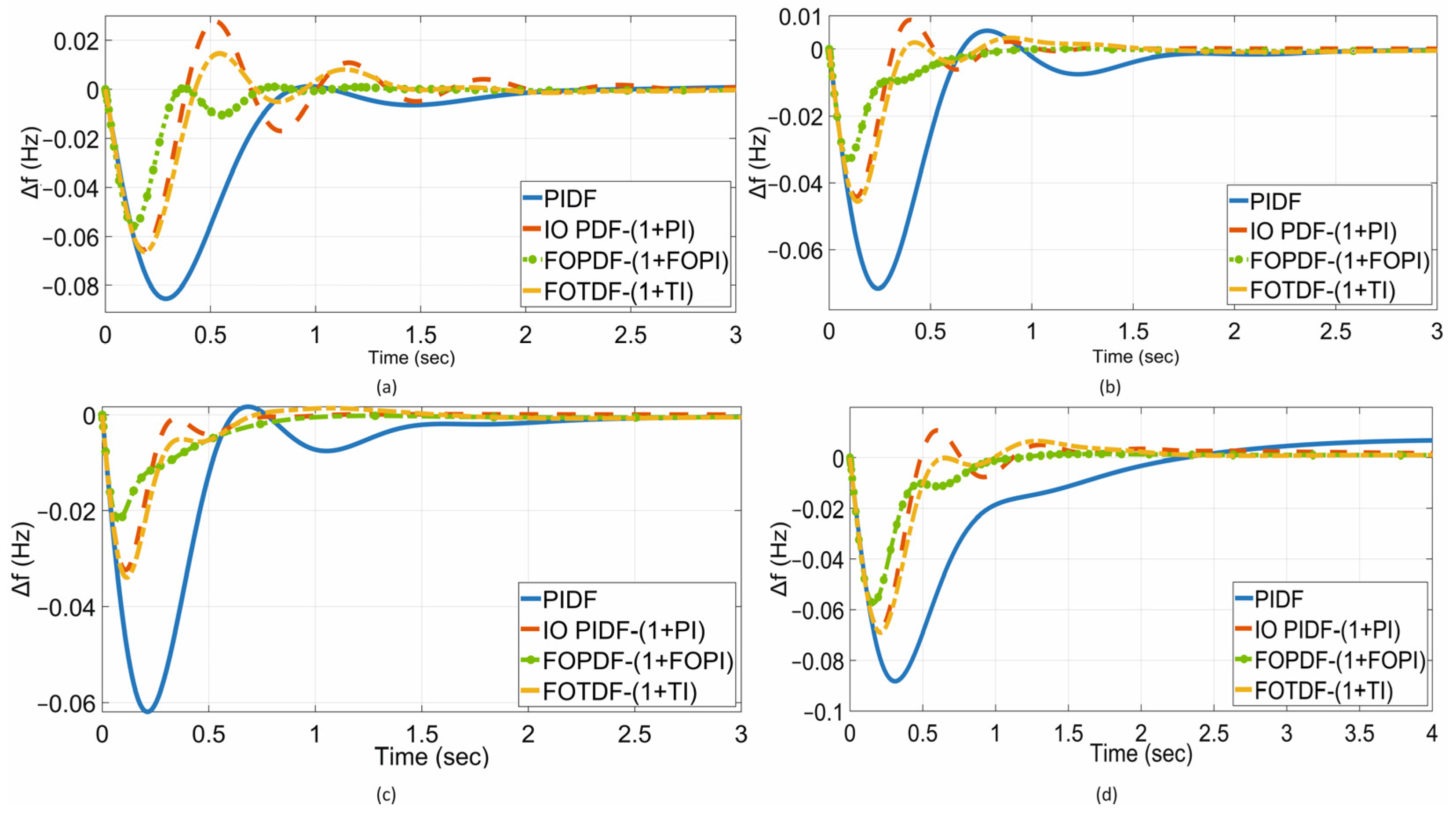
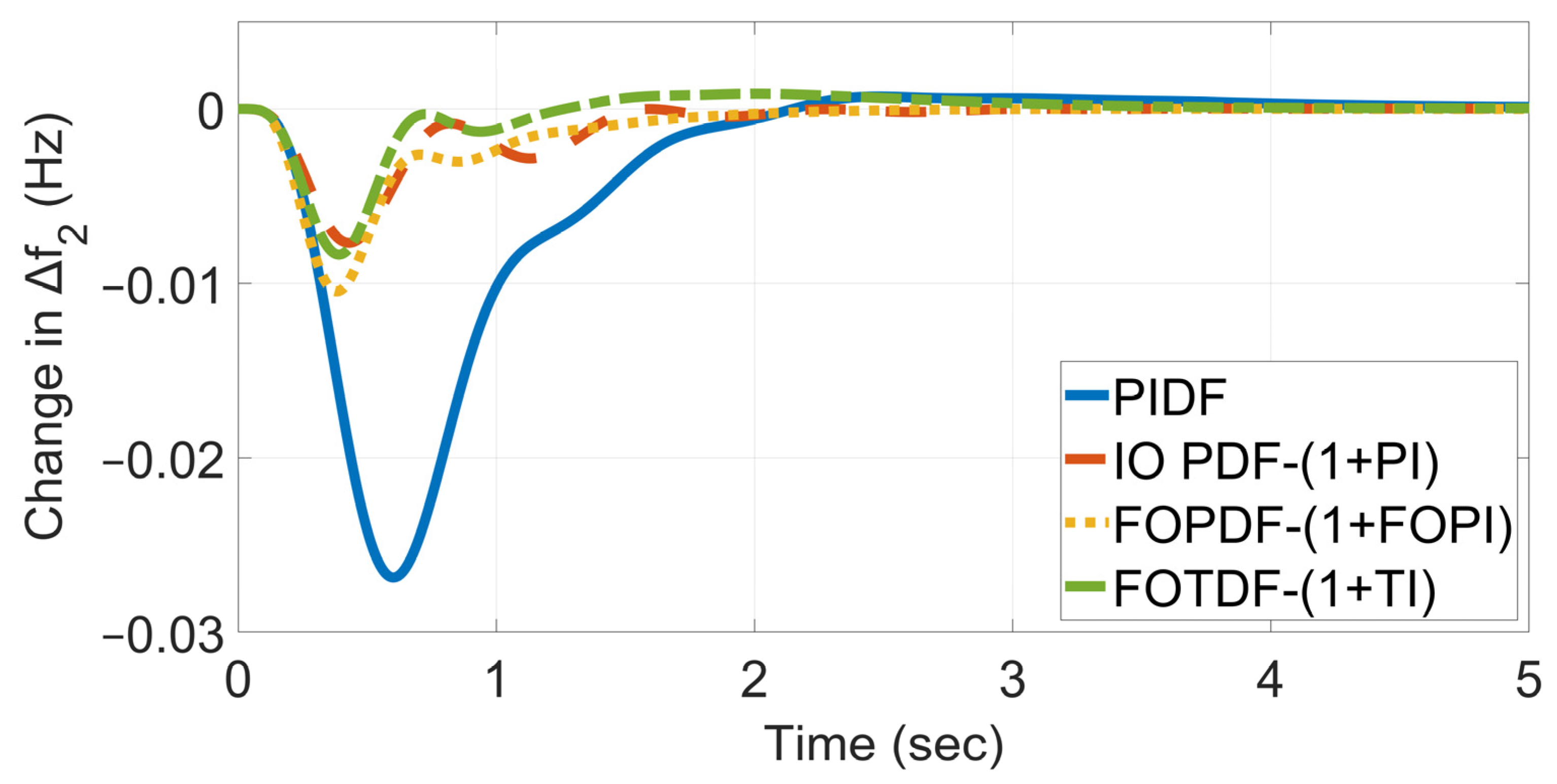
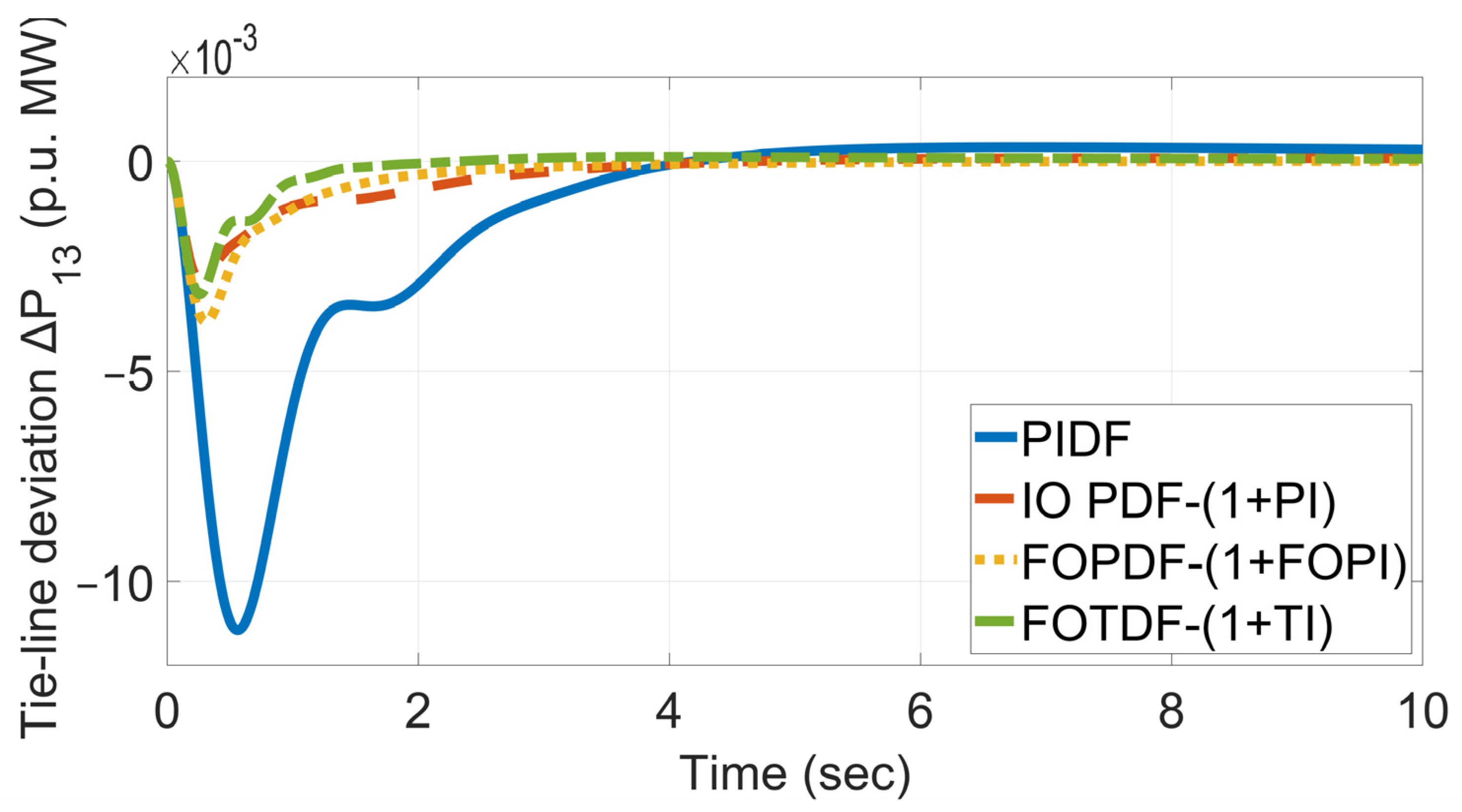
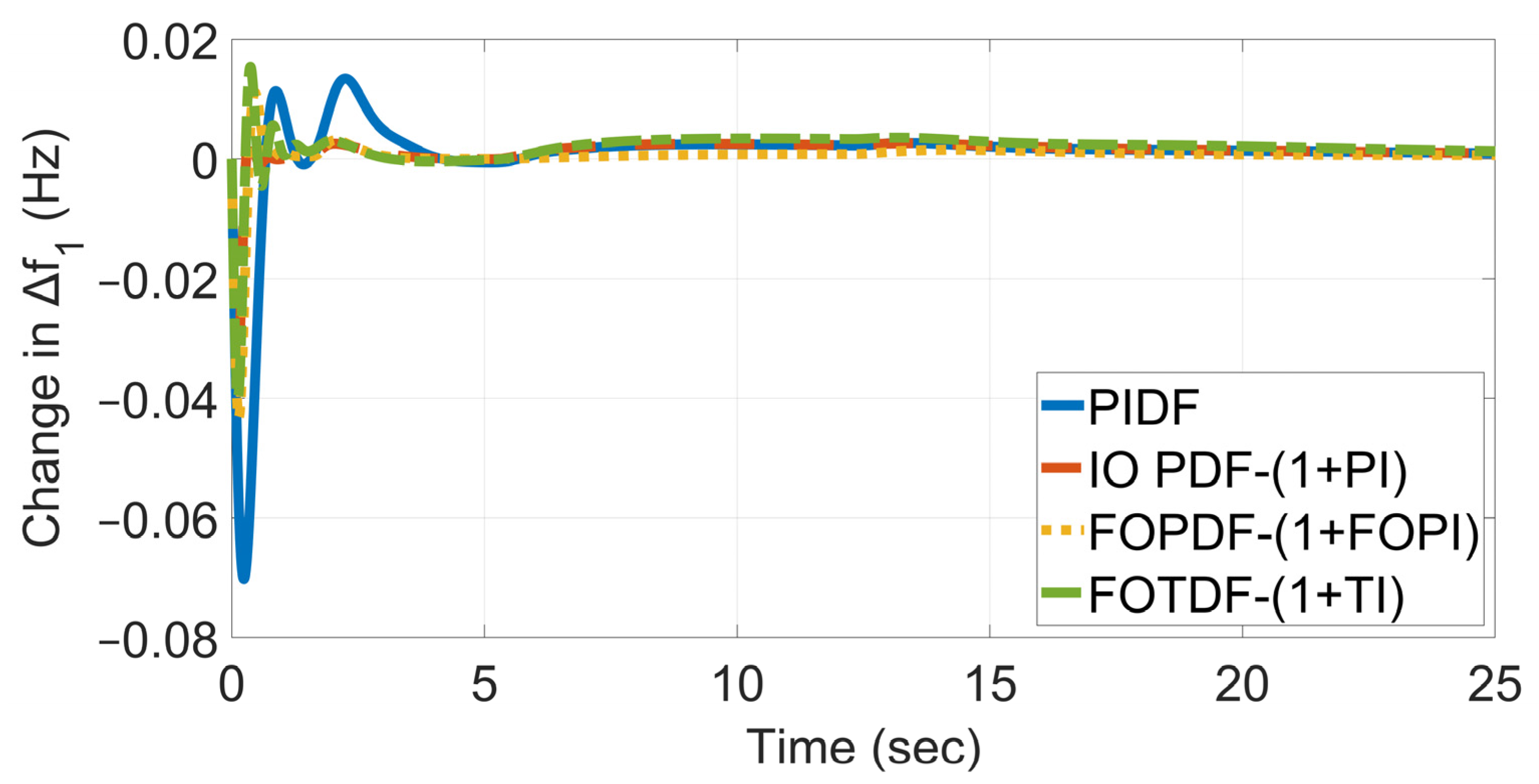
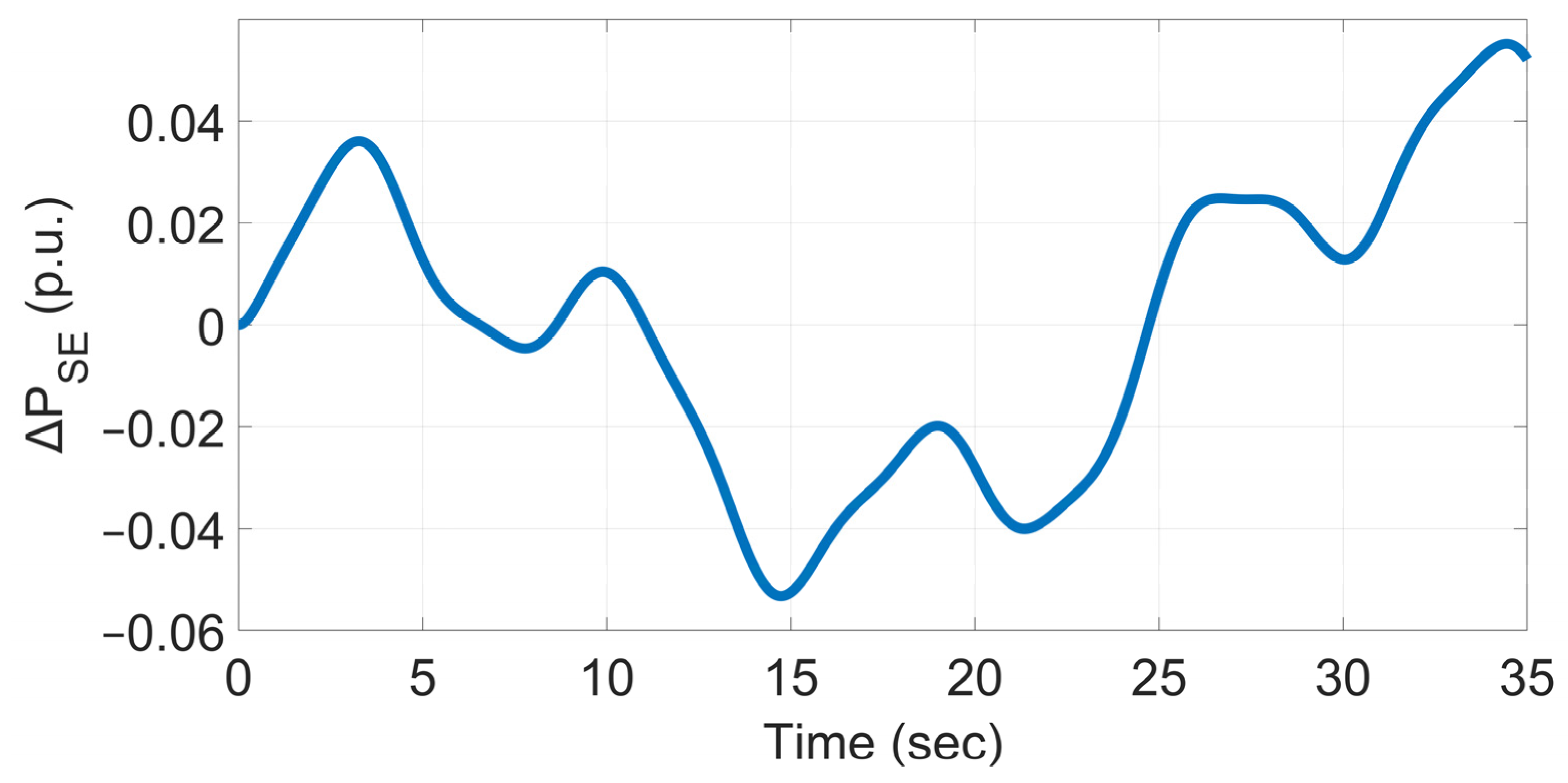
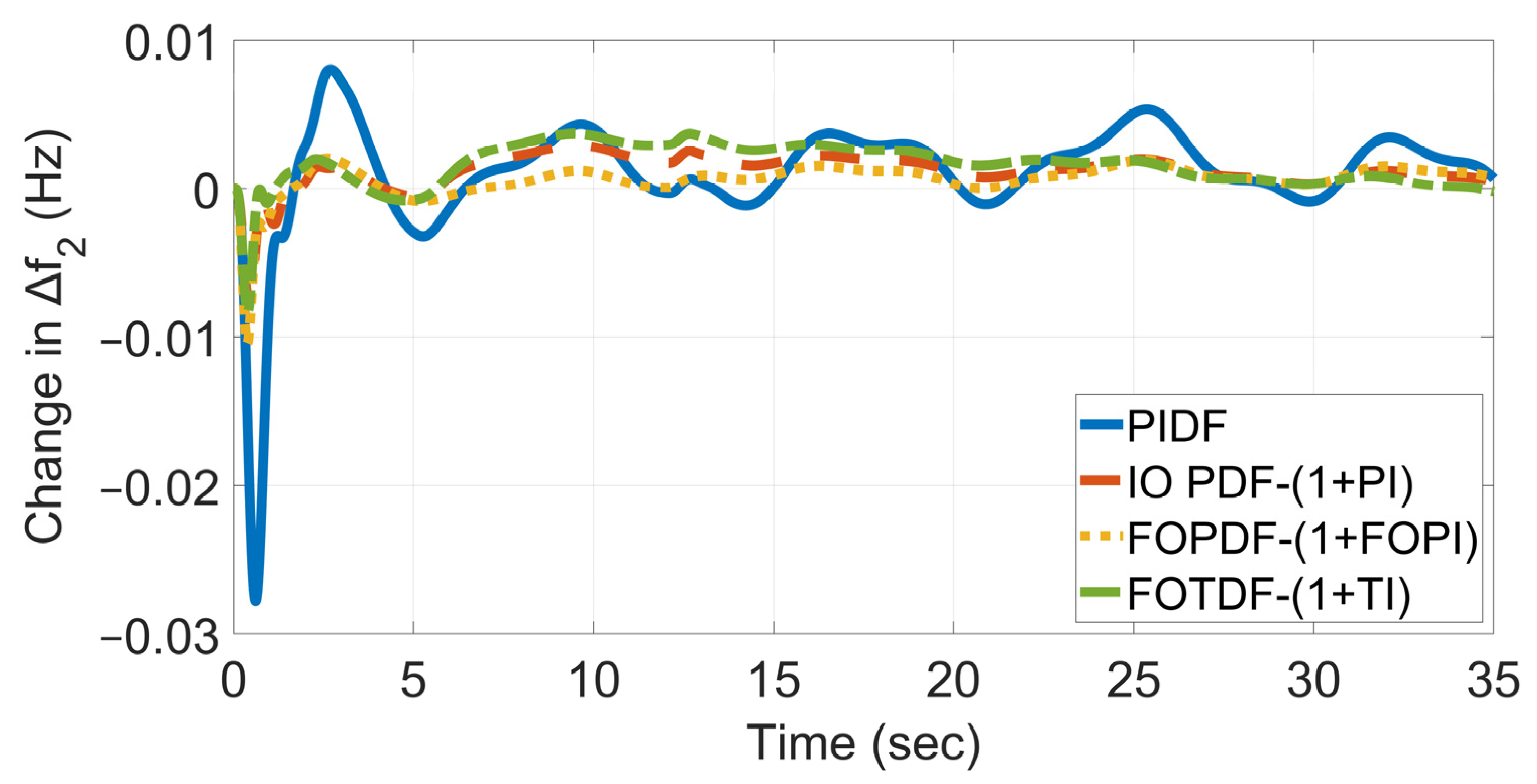
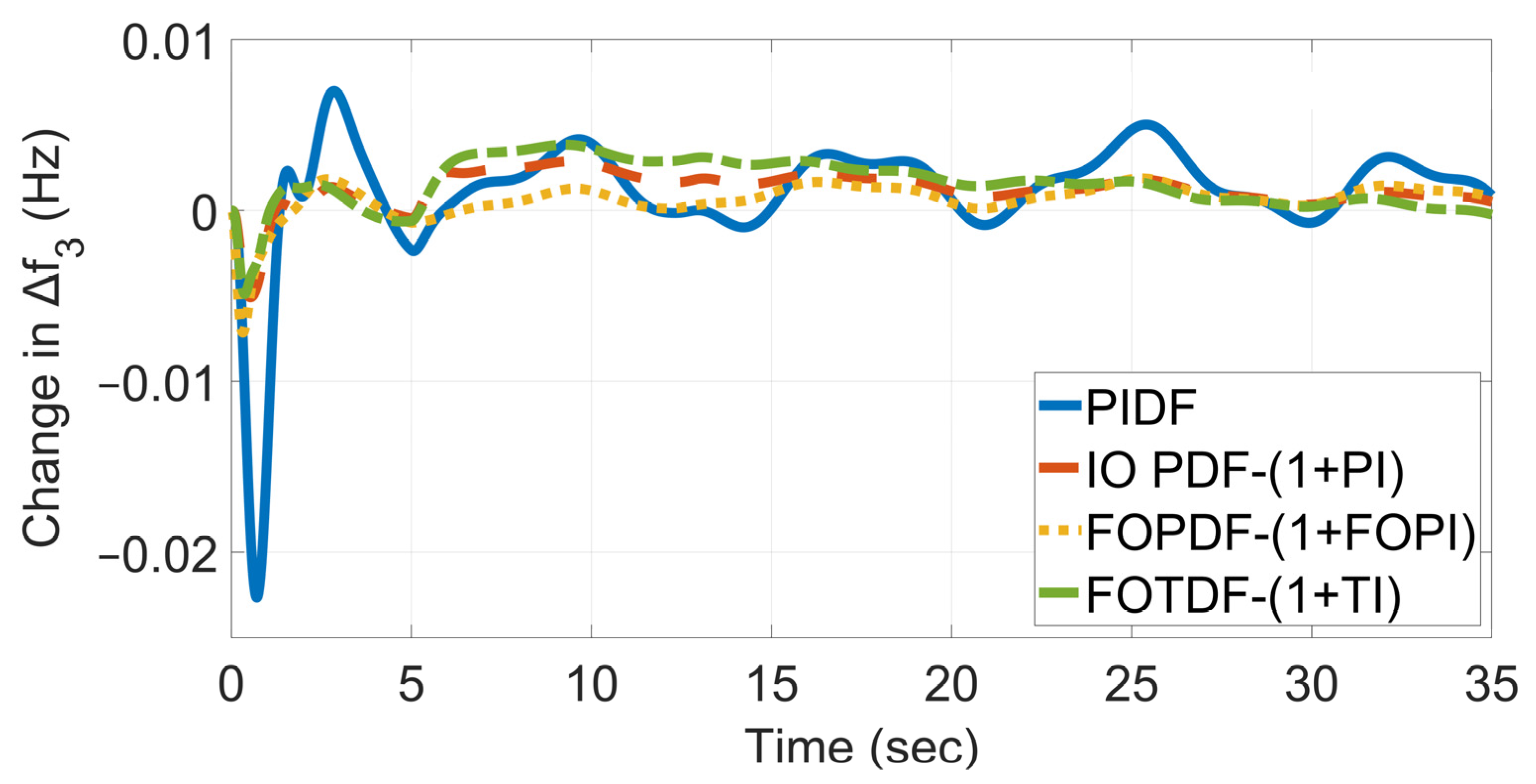
This study implemented a FOPDF (1+FOPI) controller in a single-area microgrid and three-area multi-source interconnected microgrids that incorporates bioenergy generation, RESs, and H-ESSs for frequency regulation. Firstly, the controller was tested in a single-area microgrid without RES penetration. The simulations revealed that the proposed controller improved the maximum overshoot by 41.18%, 96.42%, and 93.15% when compared to that of the PIDF, IO PDF-(1+PI), and FOTDF-(TI) controllers. Next, the proposed controller was evaluated in the three-area interconnected microgrids. The results showed that, compared to that of the PIDF and IO PDF-(1+PI) controllers, the proposed controller improved the settling time in area two by 38.29% and 17.75%. Following the introduction of a step and varied change in ORC-STTP, PV and sea wave generation in the form of disturbance, the proposed controller and the IO PDF-(1+PI) controller were able to effectively damp the disturbances in contrast to the PIDF and FOTDF-(1+TI) controllers. Subsequently, communication time delay was introduced in each area, and Gaussian noise was added to the control error in the first and second microgrids. The FOPDF-(1+FOPI) controller was more effective in suppressing the injected noise compared to the other three controllers. This improvement can be quantified in terms of the ITAE value, where the proposed controller had an ITAE value that was 45.4%, 14.52%, and 22.97% smaller than that of the other controllers. Finally, the performance of the proposed controller was tested for parameter uncertainties. The simulations revealed that the proposed controller is robust against unforeseen parameter changes.
Despite the higher complexity of the FOPDF-(1+FOPI) controller relative to the PIDF and IO PDF-(1+PI) controllers, the proposed controller offers enhanced time response characteristics and robustness. There are no inherent limitations in adopting the proposed controller aside from its computational demands.
Future work will assess the performance of the proposed controller’s via the incorporation of coupling between the LFC and AVR channels. Additionally, it will implement demand response mechanisms to contribute to frequency control.
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}