
UAV Abnormal State Detection Model Based on Timestamp Slice and Multi-Separable CNN


Abstract
:1. Introduction
2. Related Works
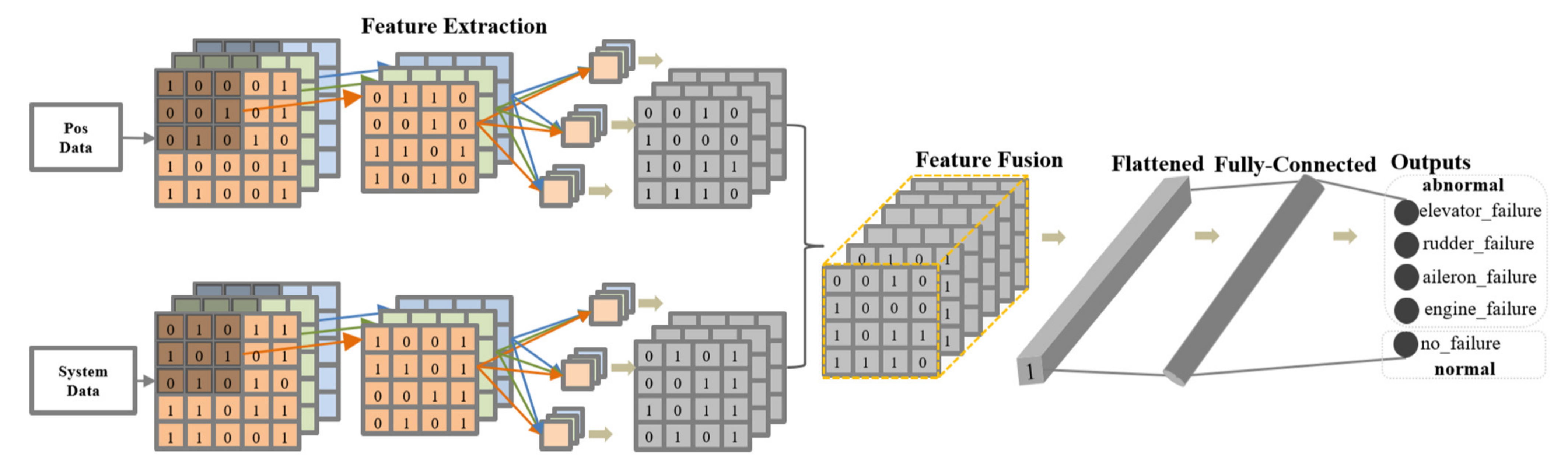
3. TS-MSCNN Model Design
3.1. UAV Flight Data Processing Methods
3.1.1. Analysis of ALFA Dataset
3.1.2. Frequency Domain Information Extraction and Fusion Method Based on Timestamp Slices
3.1.3. Unbalanced Data Processing
3.1.4. Validation of Flight Data
3.2. Design of Anomaly Detection Model
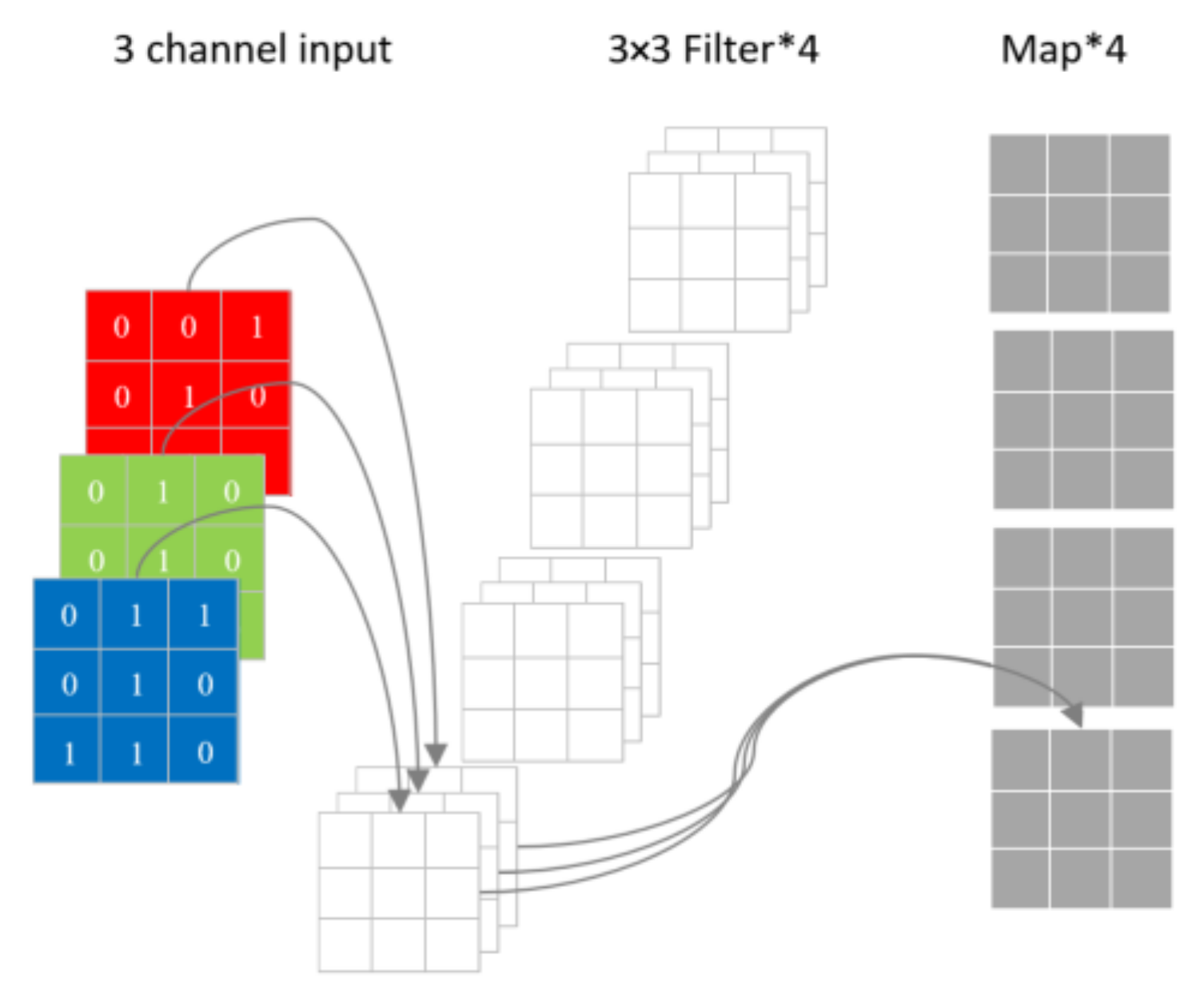
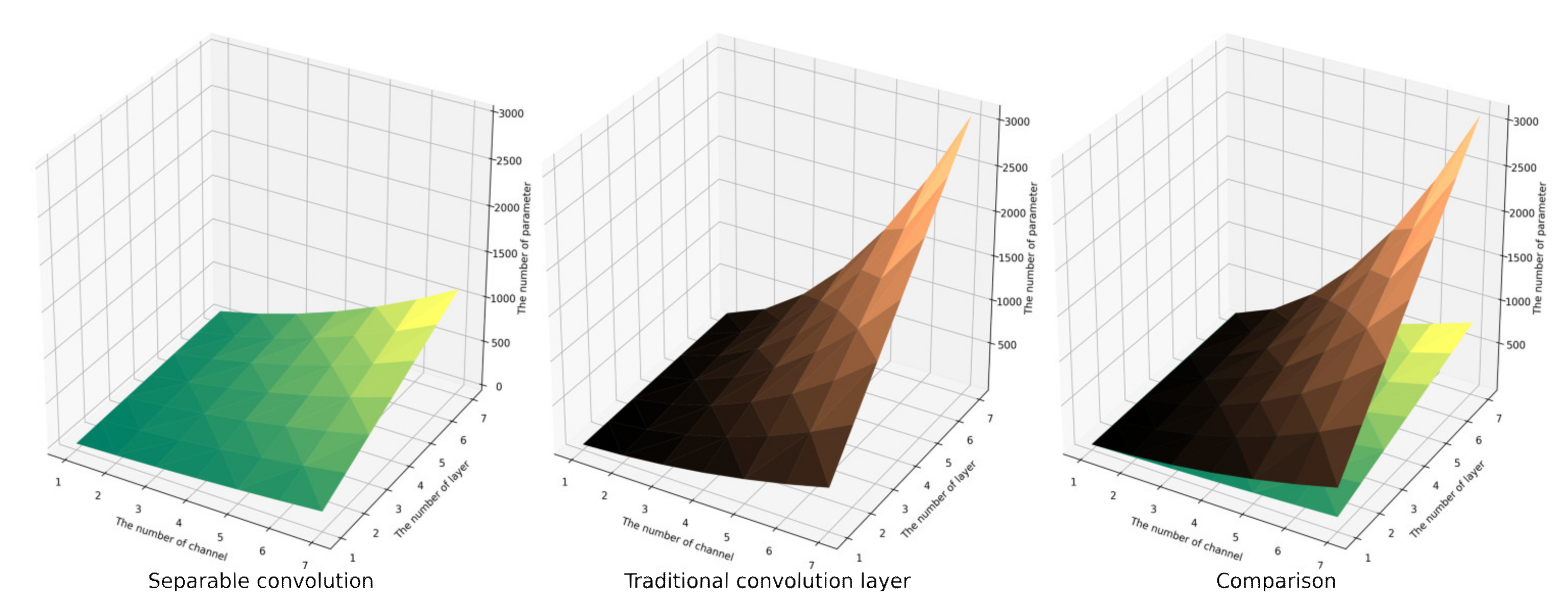
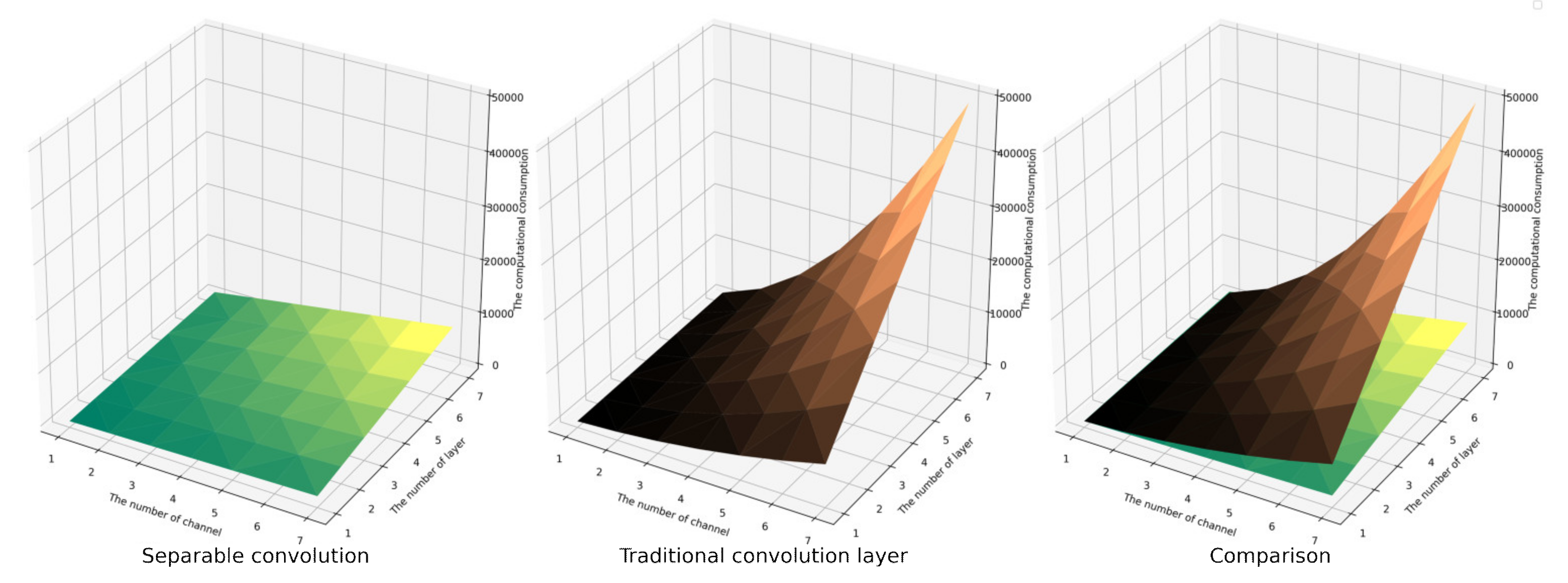
3.2.1. Separable Convolutional
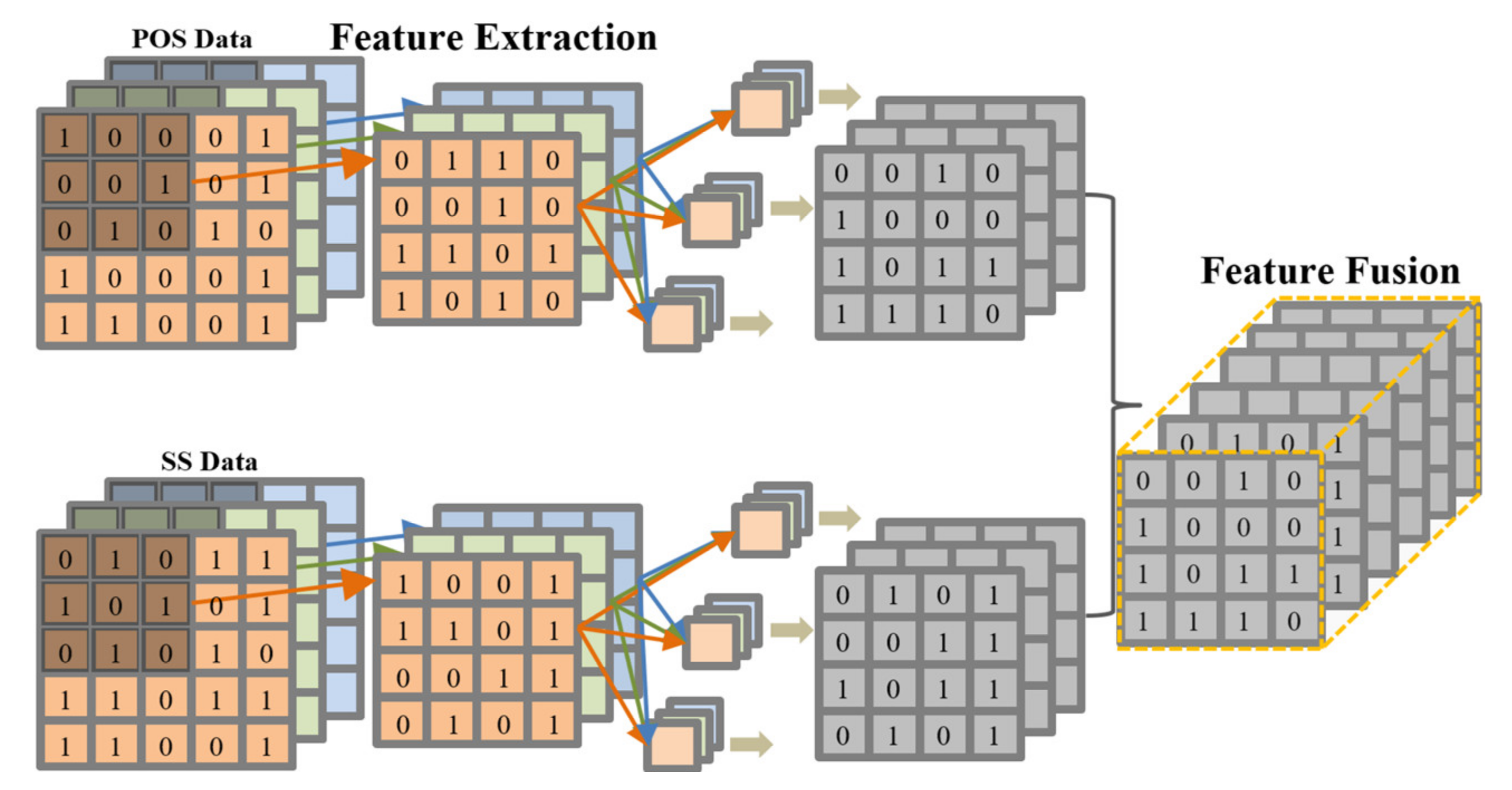
3.2.2. Feature Extraction and Fusion Layer
3.2.3. Feature Mapping and Classification Layer
3.2.4. TS-MSCNN Model Design
4. Experiment
4.1. Evaluation Metrics
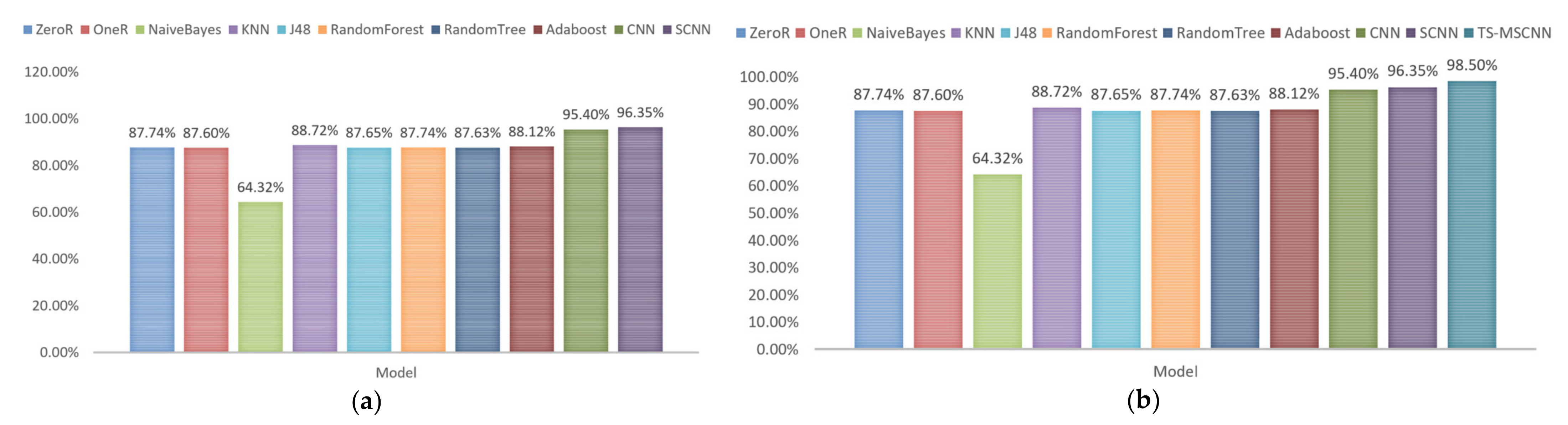
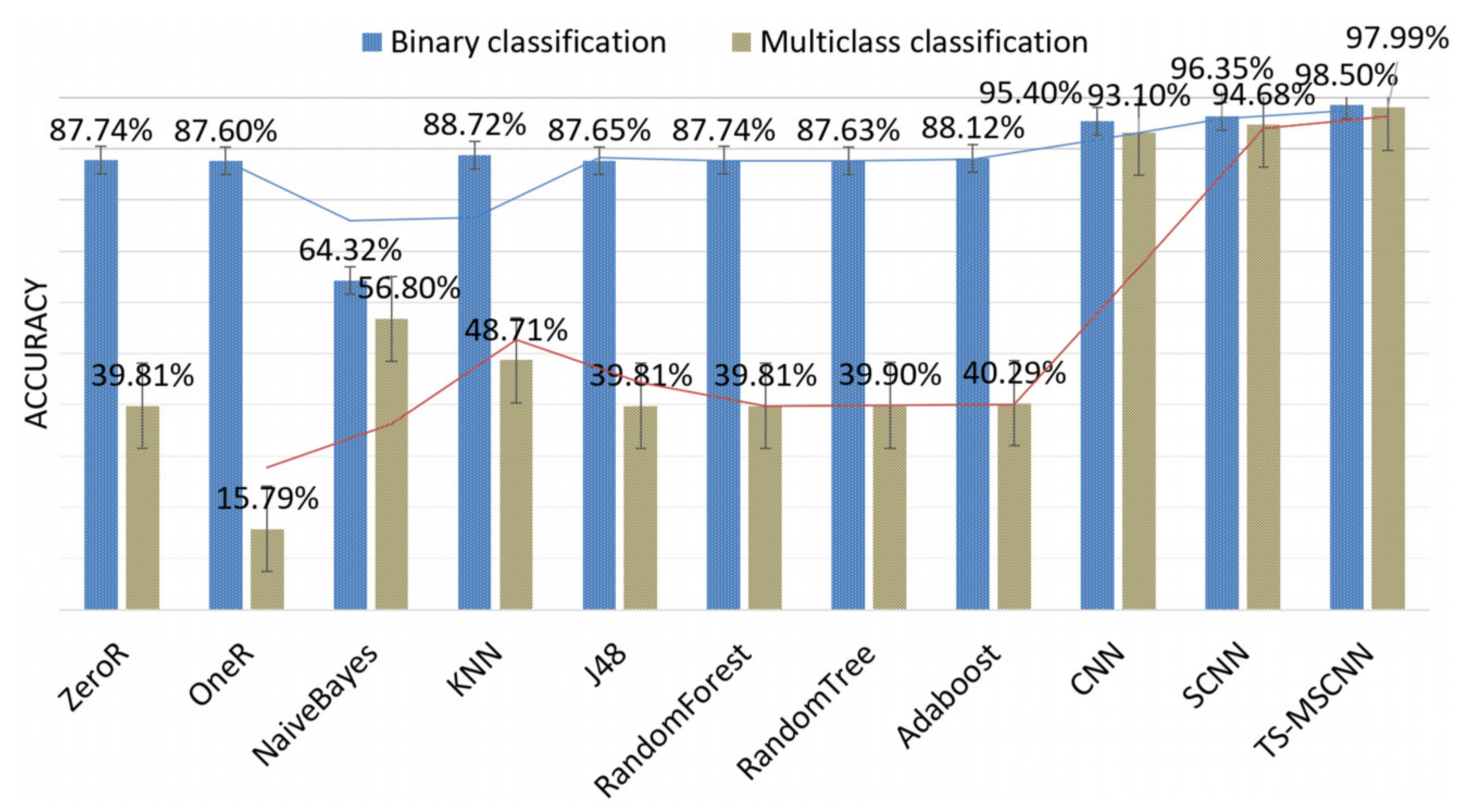
4.2. Single SCNN Model for Binary Classification
4.3. Multi-SCNN Fusion Model for Binary Classification
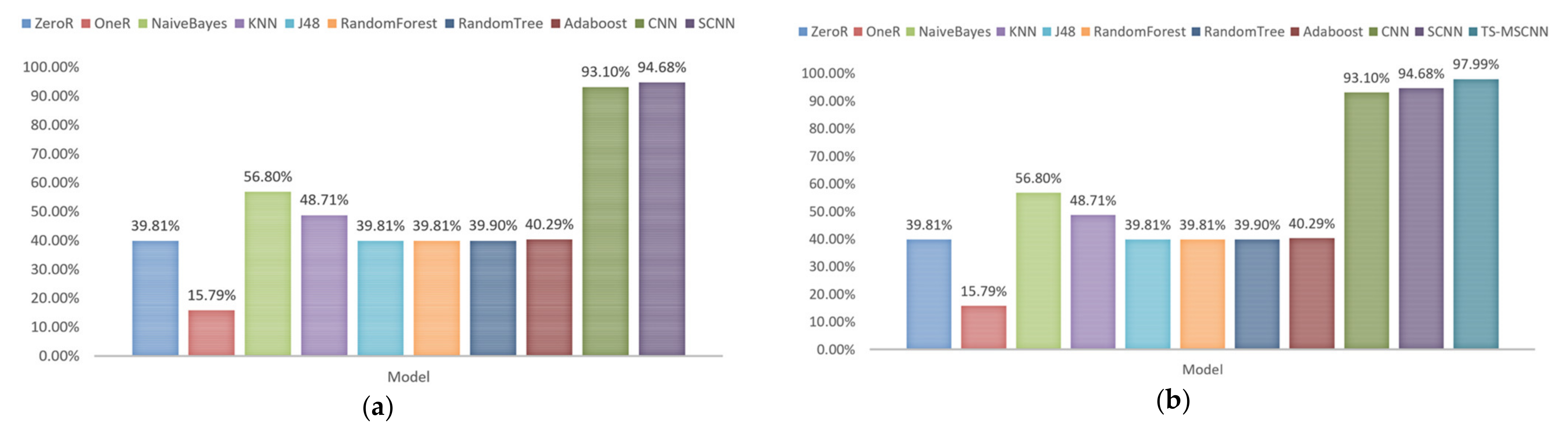
4.4. Single SCNN Model for Multiclass Classification
4.5. Multi-SCNN Fusion Model for Multiclass Classification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kulbacki, M.; Segen, J.; Knieć, W.; Klempous, R.; Kluwak, K.; Nikodem, J.; Kulbacka, J.; Serester, A. Survey of drones for agriculture automation from planting to harvest. In Proceedings of the 2018 IEEE 22nd International Conference on Intelligent Engineering Systems (INES), Las Palmas de Gran Canaria, Spain, 21–23 June 2018; pp. 000353–000358. [Google Scholar]
- Puri, A. A survey of unmanned aerial vehicles (UAV) for traffic surveillance. Dep. Comput. Sci. Eng. Univ. S. Fla. 2005, 1–29. [Google Scholar]
- Innocente, M.S.; Grasso, P. Self-organising swarms of firefighting drones: Harnessing the power of collective intelligence in decentralised multi-robot systems. J. Comput. Sci. 2019, 34, 80–101. [Google Scholar] [CrossRef]
- Choudhary, G.; Sharma, V.; You, I.; Yim, K.; Chen, R.; Cho, J.H. Intrusion detection systems for networked unmanned aerial vehicles: A survey. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 560–565. [Google Scholar]
- Available online: www.popularmechanics.com (accessed on 15 December 2022).
- Jimu News. Available online: http://www.ctdsb.net/ (accessed on 10 December 2022).
- Civil Aviation Administration of China. Available online: www.caac.gov.cn (accessed on 20 December 2022).
- Puranik, T.G.; Mavris, D.N. Identifying instantaneous anomalies in general aviation operations. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2017; p. 3779. [Google Scholar]
- Hamel, T.; Mahony, R. Attitude estimation on SO [3] based on direct inertial measurements. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 2170–2175. [Google Scholar]
- Garraffa, G.; Sferlazza, A.; D’Ippolito, F.; Alonge, F. Localization Based on Parallel Robots Kinematics as an Alternative to Trilateration. IEEE Trans. Ind. Electron. 2021, 69, 999–1010. [Google Scholar] [CrossRef]
- Kendoul, F. Survey of advances in guidance, navigation, and control of unmanned rotorcraft systems. J. Field Robot. 2012, 29, 315–378. [Google Scholar] [CrossRef]
- Alonge, F.; D’Ippolito, F.; Fagiolini, A.; Garraffa, G.; Sferlazza, A. Trajectory robust control of autonomous quadcopters based on model decoupling and disturbance estimation. Int. J. Adv. Robot. Syst. 2021, 18, 1729881421996974. [Google Scholar] [CrossRef]
- Koubâa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro air vehicle link (mavlink) in a nutshell: A survey. IEEE Access 2019, 7, 87658–87680. [Google Scholar] [CrossRef]
- Keipour, A.; Mousaei, M.; Scherer, S. Alfa: A dataset for uav fault and anomaly detection. Int. J. Robot. Res. 2021, 40, 515–520. [Google Scholar] [CrossRef]
- Mitchell, R.; Chen, I.R. Specification based intrusion detection for unmanned aircraft systems. In Proceedings of the First ACM MobiHoc Workshop on Airborne Networks and Communications, Hilton Head, SC, USA, 11 June 2012; pp. 31–36. [Google Scholar]
- Mitchell, R.; Chen, R. Adaptive intrusion detection of malicious unmanned air vehicles using behavior rule specifications. IEEE Trans. Syst. Man Cybern. Syst. 2013, 44, 593–604. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Ansari, N. A hierarchical detection and response system to enhance security against lethal cyber-attacks in UAV networks. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 1594–1606. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Ding, W. A KNNS based anomaly detection method applied for UAV flight data stream. In Proceedings of the 2015 Prognostics and System Health Management Conference (PHM), Beijing, China, 21–23 October 2015; pp. 1–8. [Google Scholar]
- Sedjelmaci, H.; Senouci, S.M.; Ansari, N. Intrusion detection and ejection framework against lethal attacks in UAV-aided networks: A Bayesian game-theoretic methodology. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1143–1153. [Google Scholar] [CrossRef]
- Keipour, A.; Mousaei, M.; Scherer, S. Automatic real-time anomaly detection for autonomous aerial vehicles. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5679–5685. [Google Scholar]
- Shrestha, R.; Omidkar, A.; Roudi, S.A.; Abbas, R.; Kim, S. Machine-learning-enabled intrusion detection system for cellular connected UAV networks. Electronics 2021, 10, 1549. [Google Scholar] [CrossRef]
- Chowdhury MM, U.; Hammond, F.; Konowicz, G.; Xin, C.; Wu, H.; Li, J. A few-shot deep learning approach for improved intrusion detection. In Proceedings of the 2017 IEEE 8th Annual Ubiquitous Computing, Electronics and Mobile Communication Conference (UEMCON), New York, NY, USA, 19–21 October 2017; pp. 456–462. [Google Scholar]
- Park, K.H.; Park, E.; Kim, H.K. Unsupervised fault detection on unmanned aerial vehicles: Encoding and thresholding approach. Sensors 2021, 21, 2208. [Google Scholar] [CrossRef] [PubMed]
- Abu Al-Haija, Q.; Al Badawi, A. High-performance intrusion detection system for networked UAVs via deep learning. Neural Comput. Appl. 2022, 34, 10885–10900. [Google Scholar] [CrossRef]
- Dudukcu, H.V.; Taskiran, M.; Kahraman, N. Unmanned Aerial Vehicles (UAVs) Battery Power Anomaly Detection Using Temporal Convolutional Network with Simple Moving Average Algorithm. In Proceedings of the 2022 International Conference on INnovations in Intelligent SysTems and Applications (INISTA), Biarritz, France, 8–12 August 2022; pp. 1–5. [Google Scholar]
- Zhang, C.; Li, D.; Liang, J.; Wang, B. MAGDM-oriented dual hesitant fuzzy multigranulation probabilistic models based on MULTIMOORA. Int. J. Mach. Learn. Cybern. 2021, 12, 1219–1241. [Google Scholar] [CrossRef]
- Xie, H.; Hao, C.; Li, J.; Li, M.; Luo, P.; Zhu, J. Anomaly Detection for Time Series Data Based on Multi-granularity Neighbor Residual Network. Int. J. Cogn. Comput. Eng. 2022, 3, 180–187. [Google Scholar] [CrossRef]
- Khan, W.; Haroon, M. An unsupervised deep learning ensemble model for anomaly detection in static attributed social networks. Int. J. Cogn. Comput. Eng. 2022, 3, 153–160. [Google Scholar] [CrossRef]
- Sifre, L.; Mallat, S. Rigid-motion scattering for texture classification. arXiv 2014, arXiv:1403.1687. [Google Scholar]
- Pytorch. Available online: https://pytorch.org/ (accessed on 1 December 2022).
- GJohn, P.L. Estimating continuous distributions in Bayesian classifiers. In Proceedings of the Eleventh Conference on Uncertainty in Artificial Intelligence, Montreal, QC, Canada, 18–20 August 1995; pp. 338–345. [Google Scholar]
- Peterson, L.E. K-nearest neighbor. Scholarpedia 2009, 4, 1883. [Google Scholar] [CrossRef]
- Quinlan, J.R. C4. 5: Programs for Machine Learning; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Aldous, D. The continuum random tree. II. An overview. Stoch. Anal. 1991, 167, 23–70. [Google Scholar]
- Schapire, R.E. Explaining adaboost. In Empirical Inference: Festschrift in Honor of Vladimir N. Vapnik; Springer: Berlin/Heidelberg, Germany, 2013; pp. 37–52. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Feature Name | Description |
|---|---|---|
| POS Data | Magnetic Field (x, y, z) | The value of the magnetic field at axis x, y and z |
| Linear Acceleration (x, y, z) | The linear acceleration at axis x, y and z | |
| Angular Velocity (x, y, z) | An angular velocity at axis x, y and z | |
| Velocity (x, y, z) | Measured velocity of axis x, y and z | |
| System status Data | Fluid Pressure | The value of the pressure using fluid pressure sensors |
| Temperature | The temperature of the battery | |
| Altitude Error | The error value of current altitude | |
| Airspeed Error | The error value of current airspeed | |
| Tracking Error (x) | The tracking error at x axis | |
| WP Distance | The distance between ideal location and current location |
| SITL Parameter | Default | Description |
|---|---|---|
| SIM_RC_FAIL | 0.000000 | Force RC failure |
| SIM_ACCEL_FAIL | 0.000000 | Force IMU ACC failure |
| SIM_ENGINE_MUL | 1.000000 | - |
| SIM_MAG1_DEVID | 97,539.000000 | 1st Compass (0 to remove) |
| SIM_SPEEDUP | 1.000000 | Allows running sim SPEEDUP times faster |
| SIM_WIND_TURB | 0.000000 | Not implemented |
| SIM_GYR_FAIL_MSK | 0.000000 | Bitmask for setting a Gyro 1, 2, and/or 3 failure |
| Model | Accuracy |
|---|---|
| CNN | 95.40% |
| SCNN | 96.35% |
| Model | Accuracy | Class | Recall | Precision | F1-Score |
|---|---|---|---|---|---|
| CNN | 95.40% | No_failure | 99.50% | 95.41% | 97.41% |
| failure | 67.56% | 95.27% | 79.06% | ||
| SCNN | 96.35% | No_failure | 98.35% | 96.53% | 97.43% |
| failure | 76.06% | 87.18% | 81.24% | ||
| TS-MSCNN | 98.50% | No_failure | 99.24% | 98.98% | 99.11% |
| failure | 93.06% | 94.76% | 93.91% |
| Model | Accuracy |
|---|---|
| CNN | 93.10% |
| SCNN | 94.68% |
| Model | Accuracy | Class | Recall | Precision | F1-Score |
|---|---|---|---|---|---|
| CNN | 93.10% | aileron_failure | 94.33% | 93.42% | 93.87% |
| elevator_failure | 77.11% | 90.14% | 83.12% | ||
| engine_failure | 98.01% | 96.19% | 97.09% | ||
| no_failure | 91.50% | 93.59% | 92.53% | ||
| rudder_failure | 84.07% | 88.95% | 86.44% | ||
| SCNN | 94.68% | aileron_failure | 95.44% | 93.50% | 94.46% |
| elevator_failure | 75.90% | 86.90% | 81.03% | ||
| engine_failure | 97.91% | 96.57% | 97.24% | ||
| no_failure_failure | 91.28% | 92.10% | 91.69% | ||
| rudder_failure | 82.42% | 90.91% | 86.46% | ||
| TS-MSCNN | 97.99% | aileron_failure | 99.72% | 96.39% | 98.03% |
| elevator_failure | 90.36% | 94.94% | 92.59% | ||
| engine_failure | 98.98% | 99.08% | 99.03% | ||
| no_failure | 96.20% | 97.07% | 96.63% | ||
| rudder_failure | 91.76% | 97.66% | 94.62% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, T.; Chen, J.; Deng, H.; Lu, Y. UAV Abnormal State Detection Model Based on Timestamp Slice and Multi-Separable CNN. Electronics 2023, 12, 1299. https://doi.org/10.3390/electronics12061299
Yang T, Chen J, Deng H, Lu Y. UAV Abnormal State Detection Model Based on Timestamp Slice and Multi-Separable CNN. Electronics. 2023; 12(6):1299. https://doi.org/10.3390/electronics12061299
Chicago/Turabian StyleYang, Tao, Jiangchuan Chen, Hongli Deng, and Yu Lu. 2023. "UAV Abnormal State Detection Model Based on Timestamp Slice and Multi-Separable CNN" Electronics 12, no. 6: 1299. https://doi.org/10.3390/electronics12061299
APA StyleYang, T., Chen, J., Deng, H., & Lu, Y. (2023). UAV Abnormal State Detection Model Based on Timestamp Slice and Multi-Separable CNN. Electronics, 12(6), 1299. https://doi.org/10.3390/electronics12061299