
Optimal GPS Acquisition Algorithm in Severe Ionospheric Scintillation Scene


Abstract
:1. Introduction
- (1)
- Serial acquisition algorithm is slow and computationally complex;
- (2)
- Parallel frequency space and parallel code phase acquisition algorithms are ineffective in a weak signal;
- (3)
- Coherent integration is sensitive to navigation bit sign transition and non-coherent integration is only useful with fewer integrals;
- (4)
- Block zero compensation has limitations in data length and loss of incoherent integration.
2. Basic Principles of Signal Acquisition
2.1. Parallel Code Phase Acquisition Algorithm
2.2. Differential Coherent Integration
3. Methodology
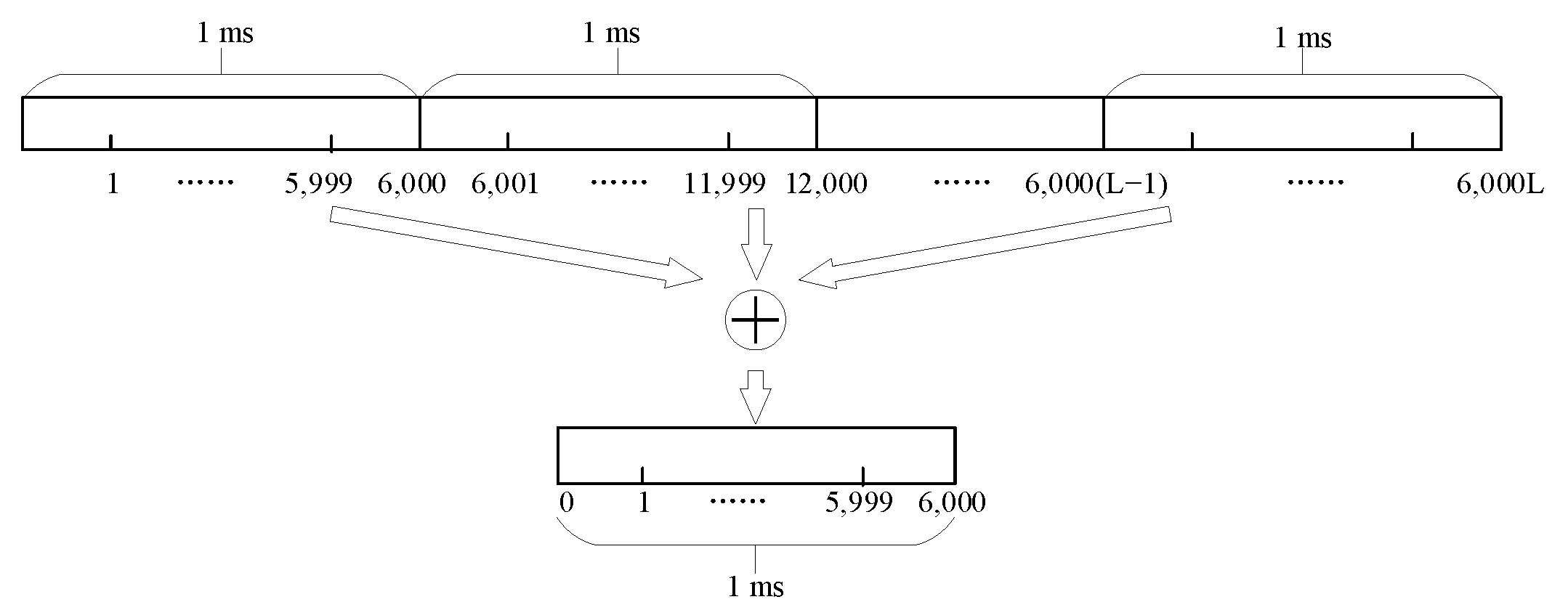
3.1. Coherent Accumulation Principle
3.2. Bit Shift Estimation Principle
3.3. Algorithm Implementation Process
- (a)
- Divide the data of continuous N ms into M data blocks. The length of each data block is L, ;
- (b)
- Accumulate each data block in step (a), separately;
- (c)
- Generate in-phase and ortho-phase carriers by the carrier generator. They are multiplied by the accumulation result of step (b) to obtain I and Q signals, which are the authentic and imaginary parts of the complex signal , respectively;
- (d)
- Transform the local code generated by the local C/A code generator into the frequency domain by FFT and obtain its complex conjugate ;
- (e)
- Multiply the corresponding elements of complex signal and , getting IFFT result ;
- (f)
- Conjugate the correlation values of adjacent blocks,;
- (g)
- Compare all , and select the minimum and then remove. It is considered that there is bit sign transition in this section of data;
- (h)
- Obtain the final decision value is based on the absolute value of the remaining :
- (i)
- Determine whether the ratio of the peak value to the second largest peak value is greater than the threshold. If it is greater than the threshold, the acquisition is successful. Otherwise, the local carrier and code phase are adjusted for the next acquisition.
4. Results
4.1. Experimental Settings
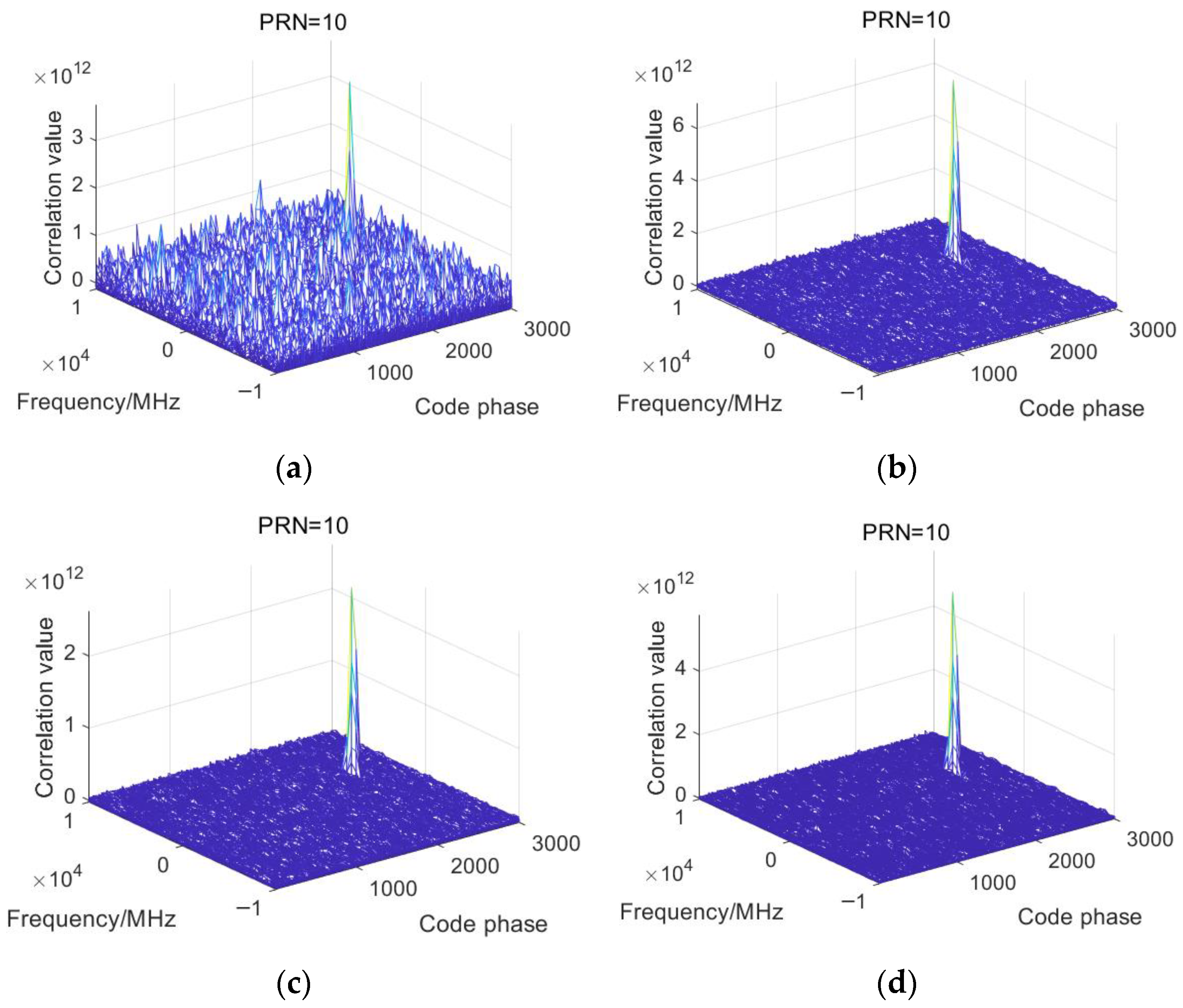
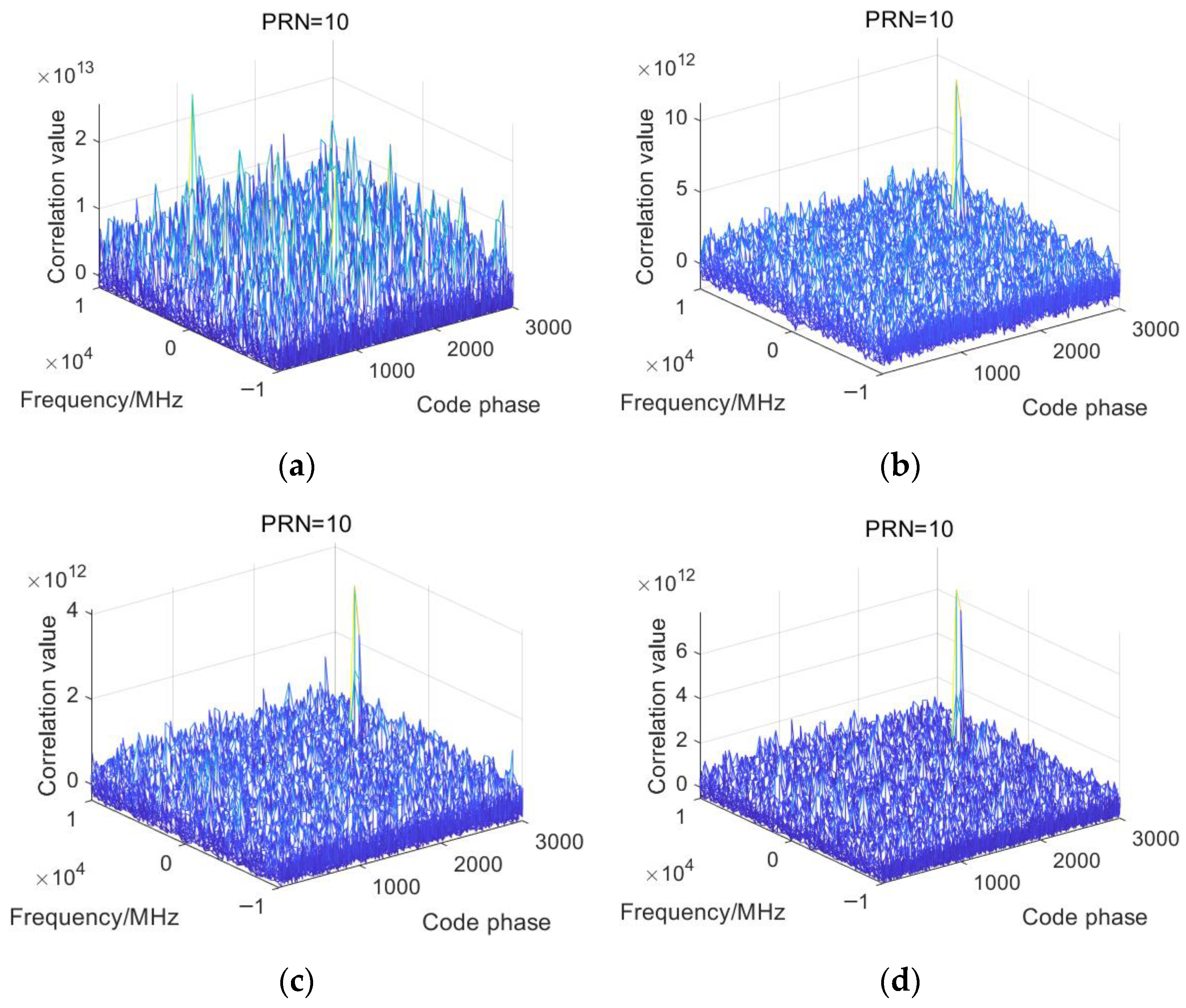
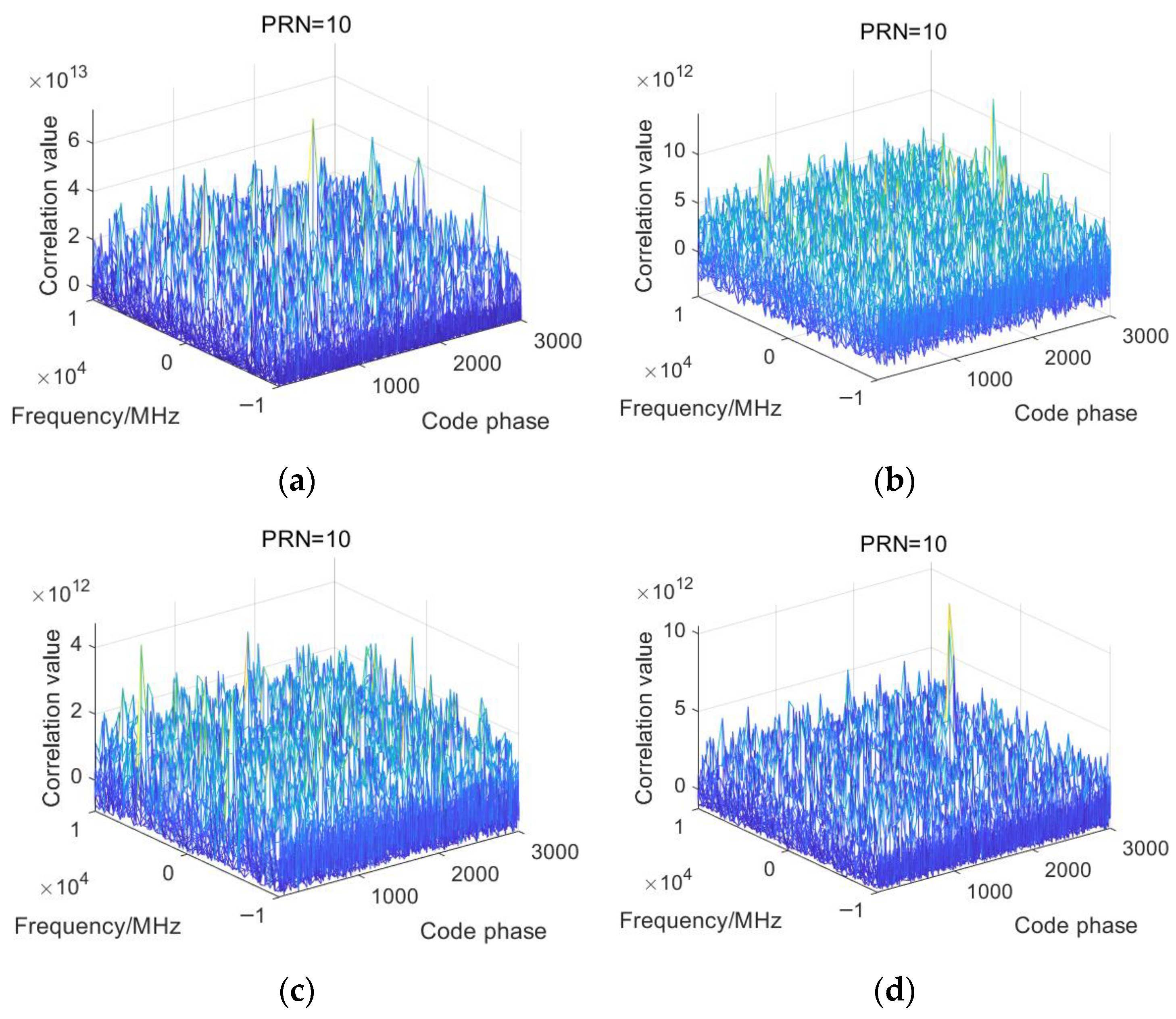
4.2. Evaluation of Acquisition Effects
4.3. Comparison of Acquisition Probability
4.4. Analysis of Acquisition Speed
4.5. Authentic Data Verification
5. Conclusions and Discussion
- (1)
- Under the same low SIR condition, the correlation peak of the signal acquired by the proposed method is more obvious, and the acquisition effect is best;
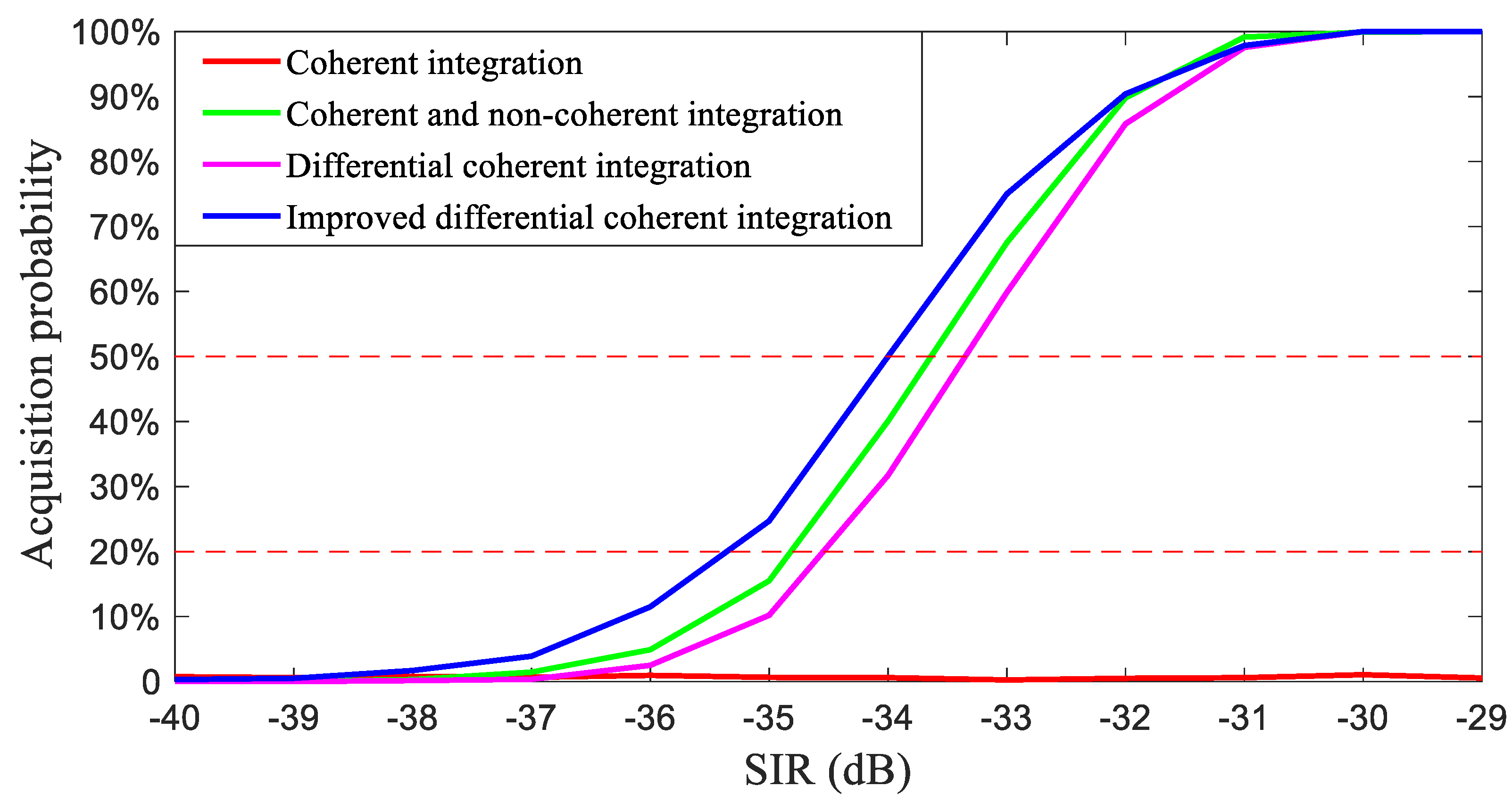
- (2)
- Under the same SIR condition, the proposed method has a higher acquisition probability of 50% when the SIR drops to −34 dB. Under real severe ionospheric scintillation, the acquisition probability of the proposed method is higher than that of traditional methods under the same experimental conditions;
- (3)
- The proposed acquisition algorithm can effectively reduce the computation complexity, which is only 21.75% of the unimproved differential coherence integration, and the acquisition time is less than the unimproved differential coherence integration.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cutugno, M.; Robustelli, U.; Pugliano, G. Low-Cost GNSS Software Receiver Performance Assessment. Geosciences 2020, 10, 79. [Google Scholar] [CrossRef] [Green Version]
- Xie, G. Principles of GPS and Receiver Design; Electronics Industry Publishing House: Beijing, China, 2009; pp. 266–384. [Google Scholar]
- Chen, X.; He, D.; Pei, L. BDS B1I multipath channel statistical model comparison between static and dynamic scenarios in dense urban canyon environment. Satell. Navig. 2020, 1. [Google Scholar] [CrossRef]
- Breitsch, B.; Morton, Y.J. A Batch Algorithm for GNSS Carrier Phase Cycle Slip Correction. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–24. [Google Scholar] [CrossRef]
- Geng, W.; Huang, W.; Liu, G.; Liu, S.; Luo, B. Assessing the Kinematic GPS Positioning Performance Under the Effect of Strong Ionospheric Disturbance Over China and Adjacent Areas During the Magnetic Storm. Radio Sci. 2022, 57, 1–18. [Google Scholar] [CrossRef]
- Zhang, Y. Weak Signal Acquisition and Tracking Algorithm Based on the GPS Software Receiver. Master’s Thesis, Xi’an University of Science and Technology, Xi’an, China, 2014. [Google Scholar]
- Lin, D.; Tsui, J.; Liou, L.; Morton, Y. Sensitivity Limit of a Stand-Alone GPS Receiver and an Acquisition Method. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 27 September 2002; pp. 1663–1667. [Google Scholar]
- Hussain, A.; Ahmed, A.; Magsi, H.; Soomro, J.B.; Bukhari, S.S.H.; Ro, J.S. Adaptive data length method for GPS signal acquisition in weak to strong fading conditions. Electronics 2021, 10, 1735. [Google Scholar] [CrossRef]
- Elders-Boll, H.; Dettmar, U. Efficient differentially coherent code/Doppler acquisition of weak GPS signals. In Proceedings of the IEEE Eighth International Symposium on Spread Spectrum Techniques & Applications, Sydney, NSW, Australia, 30 August 2004–2 September 2004; pp. 731–735. [Google Scholar]
- Huang, H.; Cao, X.; Li, X.; Cao, X. Weak Beidou B1 signal acquisition with bit transitions. J. Northwest Norm. Univ. 2019, 55, 55–60. [Google Scholar]
- Li, S.; Yi, Q.; Chen, Q.; Shi, M. Weak signal acquisition method for GPS software receiver. J. Comput. Appl. 2012, 32, 816–822. [Google Scholar] [CrossRef]
- Jeon, S.; So, H.; Kim, G.; Kee, C.; Kwon, K. Bit transition cancellation signal acquisition method for modernized GPS and Galileo signal. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 20–23 September 2011. [Google Scholar]
- Borio, D.; O’Driscoll, C.; Lachapelle, G. Coherent, noncoherent, and differentially coherent combining techniques for acquisition of new composite GNSS signals. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1227–1240. [Google Scholar] [CrossRef]
- Savas, C.; Falco, G.; Dovis, F. A Comparative Performance Analysis of GPS L1 C/A, L5 Acquisition and Tracking Stages under Polar and Equatorial Scintillations. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 227–244. [Google Scholar] [CrossRef]
- Kai, B.; Dennis, M.; Nicolaj, B.; Peter, R.; S∅ren, H. . A Software-Defined GPS and Galileo Receiver; Springer: Berlin, Germany, 2006; pp. 75–86. [Google Scholar]
- Li, X.; Guo, W. Efficient Differential Coherent Accumulation Algorithm for Weak GPS Signal Bit Synchronization. IEEE Commun. Lett. 2013, 17, 936–939. [Google Scholar]
- Zeng, D.; Ou, S.; Li, J.; Sun, J.; Li, H. Analysis and Comparison of Non-coherent and Differential Acquisition Integration Strategies. In Proceedings of the China Satellite Navigation Conference (CSNC) 2015 Proceedings, Xi’an, China, 13–15 May 2015; pp. 163–176. [Google Scholar]
- Gu, J.; Yan, G.; Yang, J. High Sensitivity Fast Acquisition Algorithm for GPS Software Receiver Signal. Fire Control Command. Control 2019, 44, 67–71. [Google Scholar]
- Cheng, Y.; Chang, Q.; Li, X. Avoiding Bit Transition Acquisition Algorithm for Weak GPS Signal. Navig. Position. Timing 2017, 4, 94–99. [Google Scholar]
- Zhang, Y. Research on Beidou Weak Signal Acquisition and Tracking Algorithm. Master’s Thesis, Fuzhou University, Fuzhou, China, 2018. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Algorithm | Parameter Settings |
|---|---|
| Coherent integration | Coherent integration time: 20 ms |
| Coherent and non-coherent integration | Coherent integration time: 2 ms Number of incoherent accumulations: 10 times |
| Differential coherent integration | Coherent integration time: 1 ms Number of differential coherent integration: 19 times |
| Improved differential coherent integration | Coherent accumulation time: 2 ms Number of differential coherent integration: 9 times |
| Acquisition Algorithm | Complex Multiplicative Quantity | Single Acquisition Time |
|---|---|---|
| Coherent integration | 9.52 × 105 | t |
| Coherent and non-coherent integration | 7.53 × 105 | 0.91 t |
| Differential coherent integration | 1.43 × 106 | 1.30 t |
| Improved differential coherent integration | 3.11 × 105 | 0.56 t |
| Acquisition Algorithm | Acquisition Probability |
|---|---|
| Coherent integration | 61.2% |
| Coherent and non-coherent integration | 95.9% |
| Differential coherent integration | 94.4% |
| Improved differential coherent integration | 96.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, M.; Luo, Y.; Zhu, X.; Tu, G.; Lu, Z. Optimal GPS Acquisition Algorithm in Severe Ionospheric Scintillation Scene. Electronics 2023, 12, 1343. https://doi.org/10.3390/electronics12061343
Lin M, Luo Y, Zhu X, Tu G, Lu Z. Optimal GPS Acquisition Algorithm in Severe Ionospheric Scintillation Scene. Electronics. 2023; 12(6):1343. https://doi.org/10.3390/electronics12061343
Chicago/Turabian StyleLin, Mengying, Yimei Luo, Xuefen Zhu, Gangyi Tu, and Zhengpeng Lu. 2023. "Optimal GPS Acquisition Algorithm in Severe Ionospheric Scintillation Scene" Electronics 12, no. 6: 1343. https://doi.org/10.3390/electronics12061343
APA StyleLin, M., Luo, Y., Zhu, X., Tu, G., & Lu, Z. (2023). Optimal GPS Acquisition Algorithm in Severe Ionospheric Scintillation Scene. Electronics, 12(6), 1343. https://doi.org/10.3390/electronics12061343