1. Introduction
In recent years, China’s air traffic industry has grown rapidly with the implementation of the 13th Five-Year Plan for Civil Aviation [
1]. However, the number of flights continues to grow, but the normal rate of flights is becoming lower and lower. During this period, the Civil Aviation Administration carried out total control of flight slots and adjusted flight structure, and the problem of flight delays was alleviated. According to a report from the Civil Aviation Work Conference 2022 held by the Civil Aviation Administration of China [
2], since 2020, due to the impact of the epidemic, the number of flights has significantly decreased abnormally, so flight delays during the epidemic are not considered. In addition, China will overtake the United States as the largest air transport organization in 2029, according to research from the International Air Transport Association (IATA) [
3]. With the COVID-19 epidemic under effective control, the volume of air traffic will also increase rapidly. Therefore, the speed of air traffic recovery and the projections of international reports firmly reflect the urgent traffic demand of China’s air traffic industry. Serious flight delays are likely to trigger “mass incidents of air passengers” [
4,
5,
6], thus endangering the public safety of the airport and the personal safety of the passengers. Understanding flight delays in advance has become a pressing issue for civil aviation. To this end, a large number of studies have been carried out by domestic and foreign scholars in related fields.
The traditional flight delay prediction methods mainly include statistical inference, simulation and modeling, and machine learning methods [
7]. Xu et al. [
8] proposed a permutation and incremental permutation SVM algorithm considering the demand of flight volume and real-time refreshment of flight data and validated it on manual data. Finally, the accuracy of flight delay prediction can reach more than 80%. Similarly, Luo ‘s team [
9] and Luo ‘s team [
10] also gradually considered using support vector machines or improved support vectors to analyze flight delays. In view of the irregular dynamic distribution attributes of flight data, Cheng et al. [
11] proposed a classification prediction model of flight delay based on C4.5 decision tree to avoid the impact of flight distribution changes on the algorithm model, which is a certain improvement compared with the traditional Bayesian algorithm. Nigam and Govinda [
12] analyzed the flight data and meteorological data of several airports in the United States and used the logistic regression algorithm in the machine learning algorithm to predict the flight departure delay. Khanmohammadi et al. [
13] proposed a flight delay prediction model based on an improved Artificial Neural Network (ANN), and they used multiple linear N-1 coding to preprocess complex airport data models. Wu et al. [
14] proposed a flight delay spread prediction model based on CBAM-CondenseNet, which enhances the transmission of deep information in the network structure by adopting a channel and spatial attention mechanism to increase the prediction accuracy. When using deep learning to predict flight delay, these scholars chose a relatively deep learning network, which requires a lot of computing time and resources. They can only choose to deploy the flight delay algorithm to the PC terminal. However, for the deployment requirements of mobile terminals, there is no trade-off between the accuracy and computational complexity of the prediction algorithm.
Recently, experts from home and abroad have carried out in-depth research and innovation in lightweight materials. In the beginning, experts used knowledge distillation, model pruning and other methods to try out algorithms. The former first trains a Net-T network and then uses network distillation to obtain a smaller Net-S network, thus achieving the effect of a simplified model. The latter simplified the model through channel pruning and other operations on the trained model [
15,
16,
17,
18,
19]. Lightweight convolutional neural networks are an emerging branch of deep learning algorithms. This type of network applies lightweight operations to the algorithm itself and continuously innovates the algorithm from within so that it can maximize accuracy and continuously meet the computational power requirements of mobile devices. For example, the peerless team [
20] proposed the ShuffleNet series algorithm, which uses the Channel Shuffle and Channel split operations [
21] to speed up network and feature reuse, and the lightweight neural network Efficientnet algorithms presented by the Google team [
22]. This algorithm comprehensively considers the input data size, network depth, and width, and proposes a model compound scaling method to control model computing power and ensure accuracy. Iandola et al. [
23] proposed a lightweight SqueezeNet algorithm that proposes a Fire module structure to design the network structure. In this structure, to extract features and lessen model computation, single-layer and double-layer convolutions were used. The Google team [
24] proposed MobileNet series algorithms, which are extremely influential in lightweight neural networks, which use deep separable convolution and SE attention mechanism for feature extraction and combine with structures, such as inverted residual error, which considerably improve the accuracy and computational performance of the model [
25,
26]. Excellent results have been achieved in face recognition, image classification, target detection, etc. [
27,
28,
29].
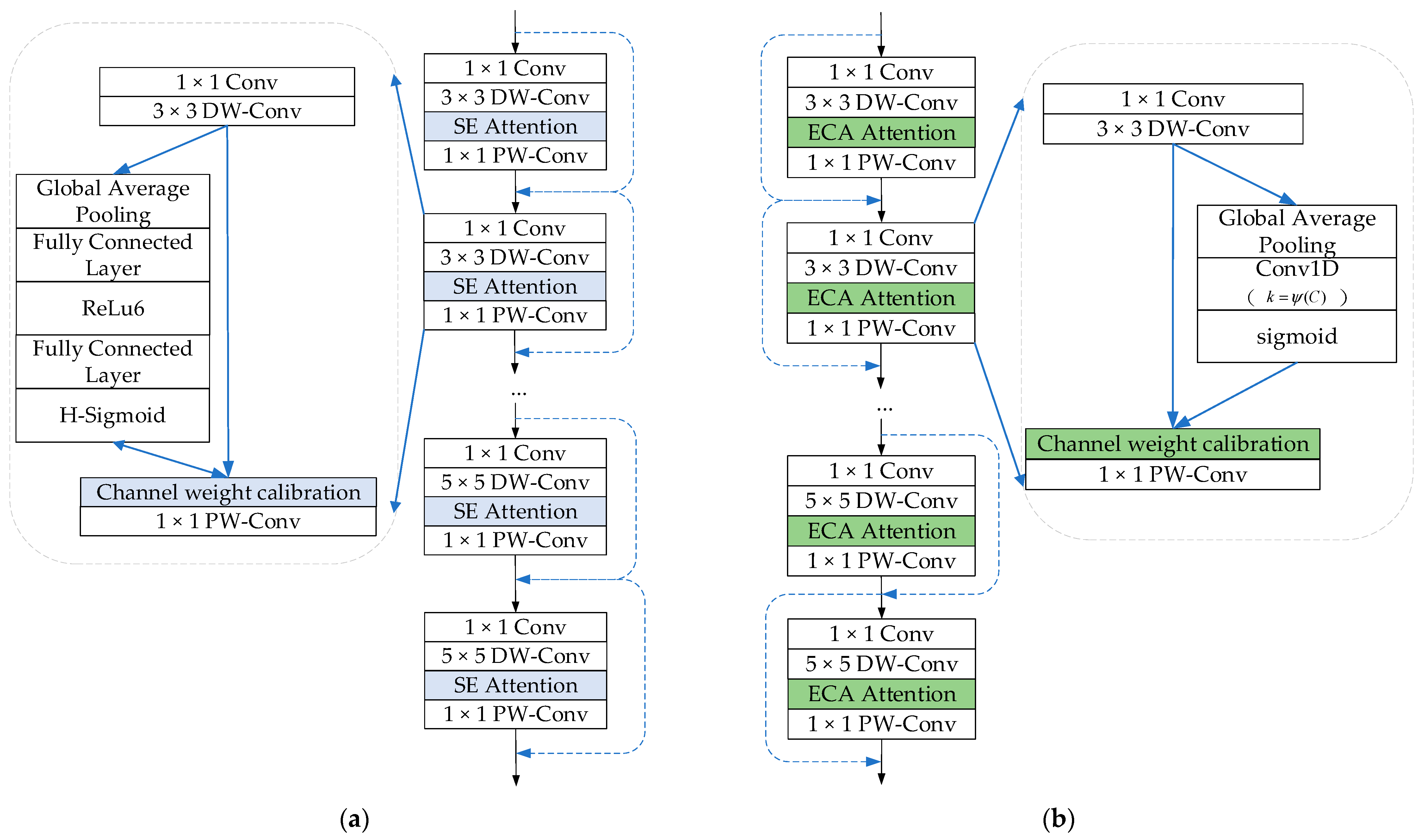
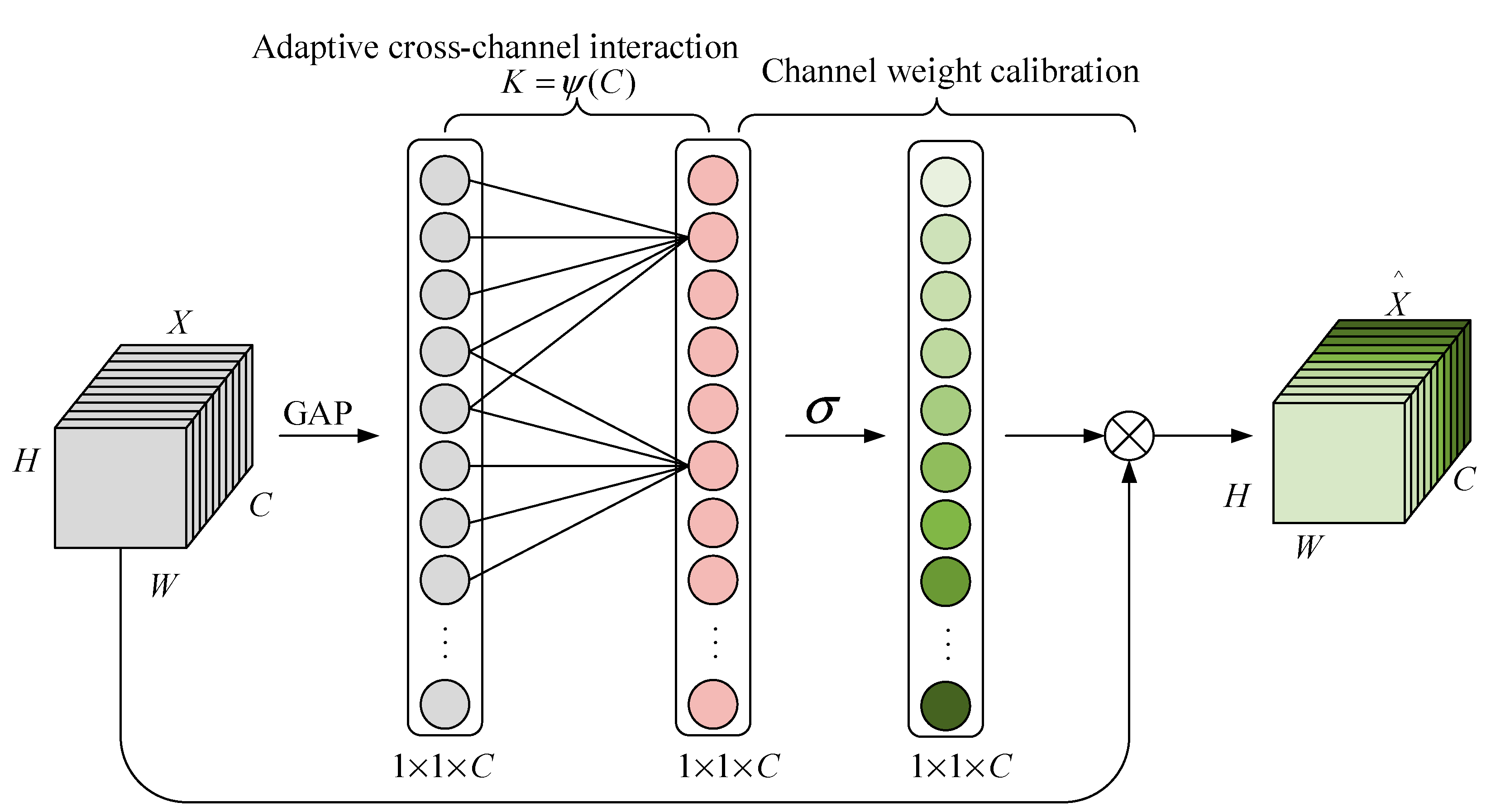
To sum up, in view of the problems of low prediction accuracy and high computational complexity of the existing flight delay prediction algorithms, which are not conducive to deployment on mobile devices and other devices, this paper proposes an improved lightweight ECA-MobilenetV3 algorithm, which replaces the SE model with a lightweight ECA (Efficient Channel Attention) module, effectively reducing the computational complexity of the model without losing accuracy; it lays a foundation for the application of the model in mobile devices. The experiment uses real domestic meteorological data and flight data for analysis and verification.
The organizational structure of this paper is as follows:
Section 1 introduces the background and significance of the paper, as well as the research status at home and abroad.
Section 2 proposes and introduces the ECA-MobileNetV3 network model.
Section 3 introduces the building process of a flight delay prediction model in detail.
Section 4 shows the analysis of the experimental results and the application of the model.
Section 5 summarizes the work of this paper and describes the future work.
3. Flight Delay Prediction Model Based on ECA-MobileNetV3
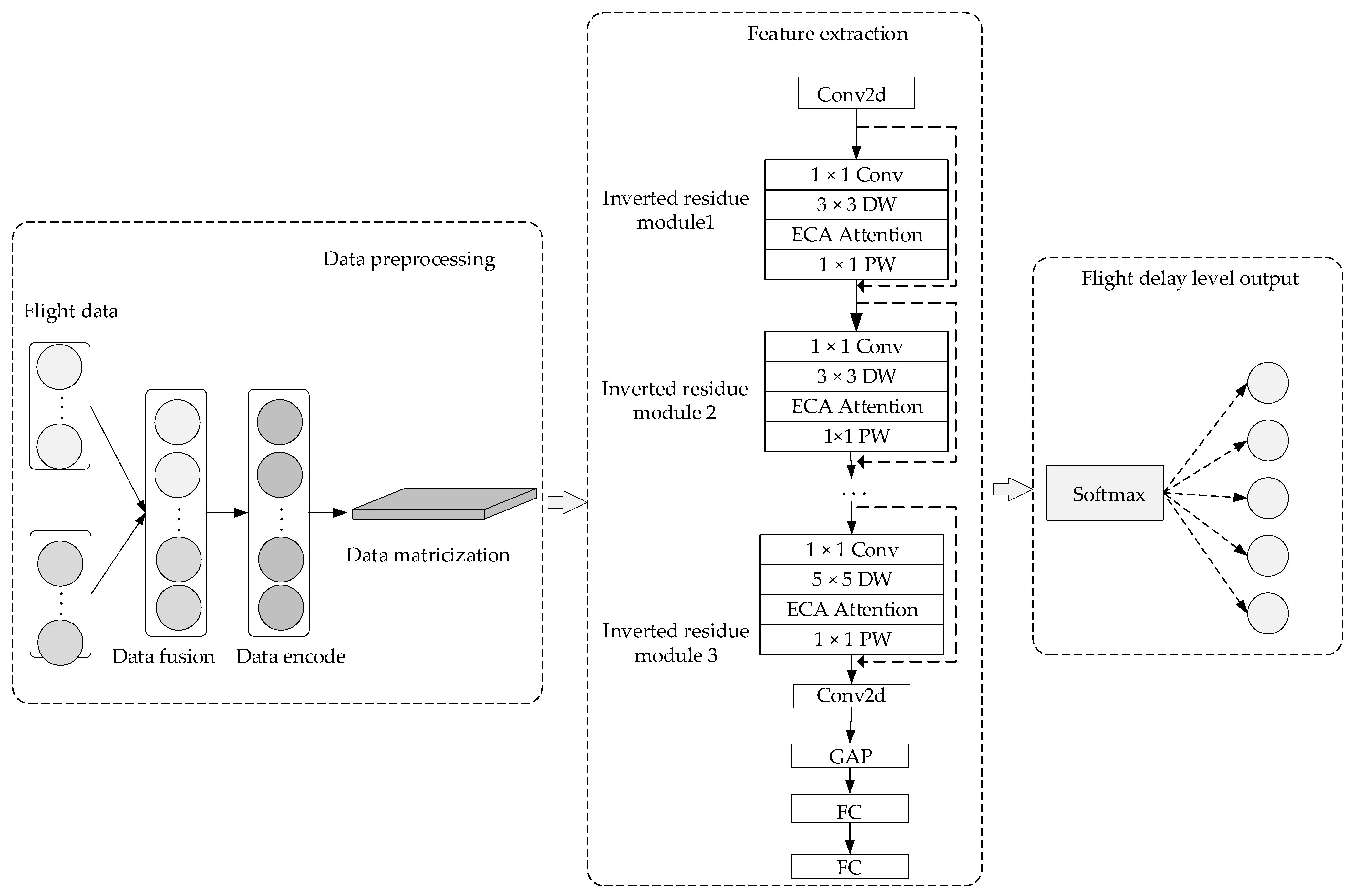
The overall structure of the flight delay prediction model based on ECA-MobileNetV3 is shown in
Figure 3. The flight delay prediction model is divided into three parts [
33]: data processing, feature extraction of the delay prediction model, and classification prediction of the model.
3.1. Data Preprocessing
The dataset used in this paper is mainly the flight dataset integrated with meteorological information and independently built. The data acquisition mainly comes from two sources: the flight dataset from March 2018 to March 2019 provided by the East China Air Traffic Administration and the meteorological dataset observed by the Automatic Weather Observation System (AWOS) [
34], and the flight dataset from September 2019 to October 2020 provided by the North China Air Traffic Administration and the corresponding meteorological dataset. The flight dataset integrated with meteorological information contains multiple characteristic variables, including flight number, departure airport, destination airport, departure time, arrival time, delay time, flight status, etc. It also includes meteorological data, such as temperature, humidity, wind speed, precipitation, etc. According to the different sources of data acquisition, the dataset is divided into the Shanghai Hongqiao Airport dataset provided by the East China Air Traffic Control Bureau and the Beijing–Tianjin–Hebei Airport Cluster dataset provided by the North China Air Traffic Control Bureau. The Shanghai Hongqiao Airport dataset contains 301,594 sample data, and the Beijing–Tianjin–Hebei Airport Cluster dataset contains 1,048,576 sample data. The dataset also contains missing values and duplicate values, the flight data provided by the air traffic control bureau is manually recorded, and the meteorological data are collected by the airport’s sensor equipment. There will be errors and omissions in the manually recorded data, and some data will be missing and incomplete due to sensor failure. During data integration processing, the same data may also be recorded repeatedly, so the dataset needs to be cleaned and processed to ensure data quality.
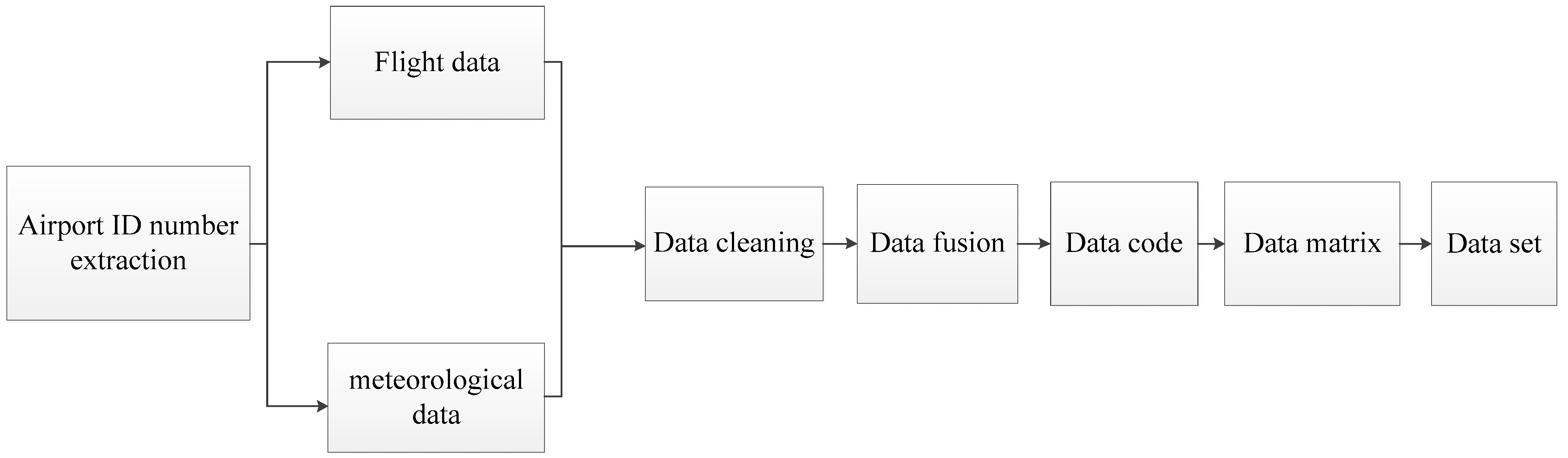
A series of preprocessing operations is performed on the dataset before feeding into the lightweight convolutional neural network algorithm.
Figure 4 shows a data preprocessing flowchart. The whole process can be divided into: data cleaning, data fusion, data encoding, and matrix quadrature. For the dataset of Shanghai Hongqiao Airport, the flights of Shanghai Hongqiao Airport should be extracted from the original dataset according to the planned departure airport and planned arrival airport according to the four-character code of civil aviation airport “ZSSS” (Shanghai Hongqiao International Airport). Similarly, for the Beijing–Tianjin–Hebei airport cluster dataset, flights from major airports in Beijing, Tianjin, and Shijiazhuang were, respectively, extracted according to the four-character code of civil aviation airport “ZBAA” (Beijing Capital International Airport), “ZBAD” (Beijing Daxing International Airport), “ZBTJ” (Tianjin Binhai International Airport), and “ZBSJ” (Shijiazhuang Zhengding International Airport), and then the subsequent data pretreatment work was carried out.
The first step in data preprocessing is data cleaning: attribute columns with many nulls in the dataset, duplicate data and attribute deletion, and other operations. The second step is data fusion operation: set the time attribute in the meteorological data as the association primary key I, set the planned start time and planned landing time in the flight data as the association primary key II according to the airport ID, and then conduct the association fusion between the primary key I and the primary key II. In order to enhance the data, the 10 min meteorological information is fused in this paper to enlarge the feature information of the fused data. The third step is the data encoding operation: Considering that the categorical data in the dataset contain low-base data and high-base data, as well as the numerical attributes of the data, the mixed encoding methods of Min–Max coding [
35] and CatBoost coding [
36] are adopted in this paper to encode the dataset, so as to ensure that the data remain in the same dimensional range before input into the algorithm. There is also no dimensional explosion. The fourth step is the data matrix operation: since the MobileNetV3 algorithm belongs to the convolutional neural network, its input data is required to be in the form of a matrix, so the dataset in this paper needs to be converted from the form of vector to the form of matrix before input into the algorithm, so as to meet the input requirements.
3.2. Feature Extraction of the Delay Prediction Model
The processed dataset needs to be transformed into tensor form and fed into the model for feature extraction and training. The specific feature extraction process is as follows: After the ECA-MobileNetV3 network model accepts the input characteristic matrix, the characteristic matrix first passes through the first standard convolution layer, which converts the input characteristic matrix into a set of characteristic graphs and then activates it immediately following a nonlinear activation function. Next, these feature maps will pass through multiple inverse residual modules composed of a standard convolution layer, deep convolution layer, ECA attention mechanism module, and point-by-point convolution layer and activation function. These convolution layers with deep separability can effectively reduce the model parameters and calculation amount, and multiple inverse residual models can extract features at different levels. During this period, the ECA-MobileNetV3 network uses an ECA module and feature fusion technology to fuse feature maps at different levels to improve the expression ability of feature maps. Then, the feature map passes through a global average pooling layer. The global average pooling layer can reduce the dimension of the feature map into a vector. Finally, this vector maps the feature vector to the target category through a fully connected layer classifier to complete the classification task.
3.3. Classification Prediction
The pre-processed dataset needs to be transformed into tensor form and fed into the model for training. According to the relevant definition of flight delay in Normal Flight Management Regulations [
37] issued by the Civil Aviation Administration of China in 2017, on this basis, this paper subdivides the delay situation into five different time periods. In this paper, the five levels of flight delay are taken as the labels of the dataset, and the flight arrival delay time is taken as the flight delay time T. It defines the difference between the actual arrival time and the planned arrival time.
According to the classification of flight delay levels given in
Table 2 and the sample number of each delay level in the two datasets, when T is less than 15 min, it is considered as delay-free; that is, the flight delay level is 0 and the label is 0. When T is between 15 and 60 min, it is considered to be slightly delayed; that is, the flight delay level is 1 and the label is 1. When T is between 60 and 120 min, it is considered moderate delay; that is, the flight delay level is 2 and the label is 2. When T is between 120 and 240 min, it is considered to be highly delayed; that is, the flight delay level is 3 and the label is 3. When T is above 240 min, it is considered a severe delay, that is, a flight delay level of 4 with a label of 4.
The flight delay prediction algorithm then uses the Softmax classifier to determine the flight delay level. Softmax function is a commonly used activation function, which is often used for the final output of multi-classification problems. The original Softmax classifier formula is shown in (15), where
represents the
-th sample,
represents the number of categories, and
represents the number of categories. The Softmax function can map a q-dimension vector to a q-dimension probability distribution, where the value of each element represents the probability size of the category. Therefore, the classifier can compute a probability value for each delay level, and the highest value is used as each datum’s final result. The Softmax classifier formula is shown in (16):
Among them, is the final output of the flight delay prediction model, is the optimal parameter obtained by the model, represents the serial number of data quantity, and represents the classification number of flight delay level.
4. Interpretation
4.1. Experimental Environment and Model Parameter Configuration
The computer used in this paper was set up as follows under the described experimental setting: the processor was an Intel Xeon E5-1620 with a CPU frequency of 3.60 GHz; memory 16.004 GB; the OS is Ubuntu16.04. The graphics accelerator GeForce GTX TITAN Xp; the deep learning development framework is Tensorflow 2.3.0. The sample size of the Shanghai Hongqiao Airport dataset used in the experiment is 301,089, the feature attribute quantity is 64, and the size after matrix is
; the sample size of Beijing–Tianjin–Hebei airport cluster dataset is 1,650,797, the feature attribute quantity is 72, and the size after matrix is
. The specific experimental parameter configurations used to train the model are shown in
Table 3 below.
4.2. Evaluation Index of the Model
Loss value and accuracy rate are evaluation metrics that characterize how well a deep learning algorithm fits. The loss value is mainly used to measure the difference between the predicted result of the model and the actual value and can be calculated from the loss function, which is negatively correlated with accuracy, with higher accuracy leading to smaller loss values. The percentage of samples that produced accurate predictions compared to all samples is known as the accuracy rate. The formula is shown in (17), where
represents the predicted correct sample.
Computational complexity can describe the hardware consumption at runtime. The higher the complexity, the more memory is occupied and the higher the processing time required. It is mainly divided into spatial complexity and time complexity: spatial complexity is expressed in terms of the number of parameters. The number of parameters of single-layer convolutional layer and single-layer fully connected layer in the algorithm can be approximated as Formulas (18) and (19). The time complexity is expressed in computational quantities, which might be understood as the quantity of FLOPs (Floating Point Operations). The computation amount of single-layer convolutional layer and single-layer fully connected layer can be approximated as Formulas (20) and (21).
In Formulas (18) and (19), and are the number of parameters of single-layer convolutional layer and single-layer fully connected layer, respectively, is the convolutional kernel size in the current layer, is the number of input feature channels of the current layer, is the number of output feature channels of the current layer, and is the input feature size of the current layer. In Formulas (20) and (21), and are the calculated amount of single-layer convolutional layer and single-layer full connection layer, respectively. Thus, 1 represents the output feature size of the full connection layer, and the other parameters have the same meaning in the parameter number formula.
4.3. Loss Values and Accuracy Rates
The validation will be performed on the Shanghai Hongqiao Airport dataset and the Beijing–Tianjin–Hebei Airport dataset.
Based on the Shanghai Hongqiao Airport dataset, the accuracy and the magnitude of loss values in the MobileNetV3 algorithm and ECA-MobileNetV3 algorithm with different channel factors are given in
Table 4. According to
Table 4, from the longitudinal analysis, the accuracy of MobileNetV3 and ECA-MobileNetV3 algorithms gradually increases and the loss value gradually decreases as the channel factor becomes larger, and the accuracy of the MobileNetV3 algorithm reaches the highest at 98.87% when the channel factor is 1.00. The ECA-MobileNetV3 algorithm achieves the highest accuracy of 98.97% at a channel factor of 0.75. From a cross-sectional perspective, the accuracy of the ECA-MobileNetV3 algorithm with the addition of the ECA attention mechanism module is higher than that of the original MobileNetV3 algorithm for the same number of channel factors, and it can be seen that the improved algorithm does not lose accuracy on a single-airport dataset such as the Shanghai Hongqiao Airport dataset.
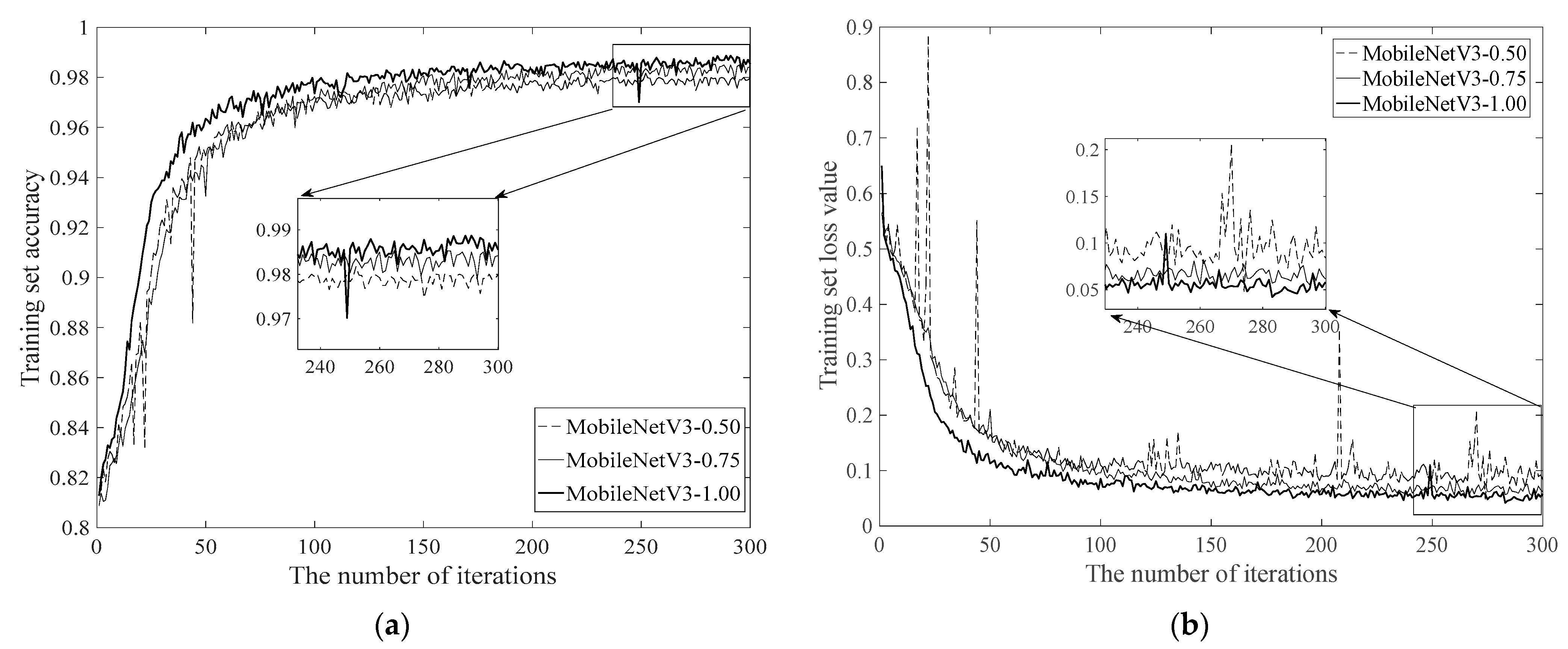
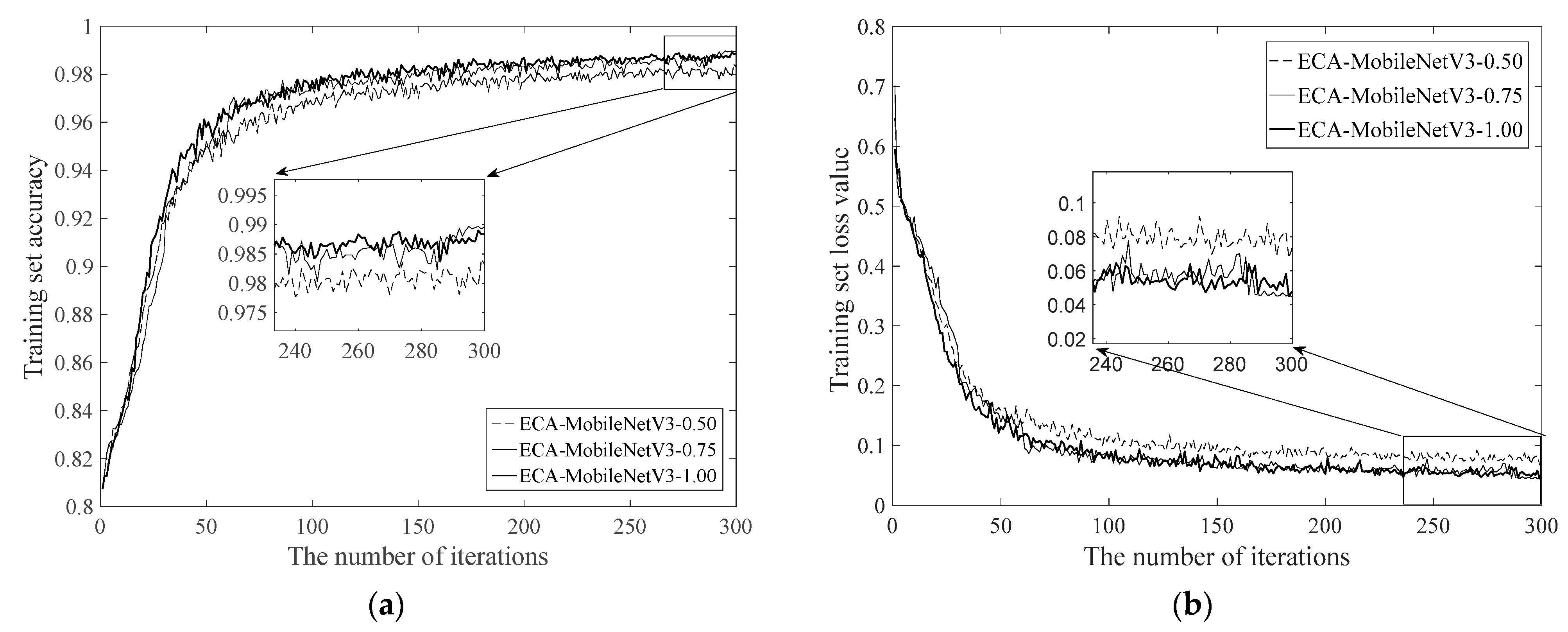
Based on the dataset of Shanghai Hongqiao Airport, the accuracy and loss curves of the MobileNetV3 algorithm and ECA-MobileNetV3 algorithm under different channel factors are, respectively, presented in
Figure 5 and
Figure 6. According to the trend of the curves, at different channel factors, the accuracy rate gently increases while the loss value gently decreases. The loss values and accuracies of MobileNetV3 and ECA-MobileNetV3 tend to stabilize when the number of training rounds is around 300. From the experimental results, the MobileNetV3 algorithm has a loss value of about 0.0419 when the channel factor is 1.00. The highest accuracy was 98.87%. When the channel factor is 0.75, the lowest loss value of the ECA-MobileNetV3 algorithm is about 0.0449, and the highest accuracy is 98.90%. Compared with the MobileNetV3 algorithm, the accuracy of the ECA-MobileNetV3 algorithm with attention mechanism is slightly improved and the loss value is slightly increased.
Based on the Beijing–Tianjin–Hebei airport cluster dataset, according to
Table 5, from the longitudinal analysis, as the channel factor becomes larger, the accuracy of the two algorithms gradually increases and the loss value gradually decreases. Further, the accuracy rates of the MobileNetV3 algorithm and ECA-MobileNetV3 algorithm reach the highest when the channel factor is 1.00, and the accuracy rate of the MobileNetV3 algorithm reaches 96.60%; the accuracy rate of the ECA-MobileNetV3 algorithm reaches 96.81%. From a cross-sectional perspective, the accuracy of the ECA-MobileNetV3 algorithm is slightly lower than that of the MobileNetV3 algorithm at channel factor numbers of 0.50 and 0.75, and the accuracy of the improved algorithm is 0.18% lower than that before the improvement at a channel factor of 0.50. At a channel factor of 1.00, the accuracy of the ECA-MobileNetV3 algorithm is slightly higher than that of the MobileNetV3 algorithm, and the accuracy of the improved algorithm is 0.21% higher than that before the improvement. Therefore, on the whole, the improved ECA-MobileNetV3 algorithm has a minor loss in accuracy and still has some advantages in a multi-airport-associated cluster dataset such as the Beijing–Tianjin–Hebei airport cluster dataset.
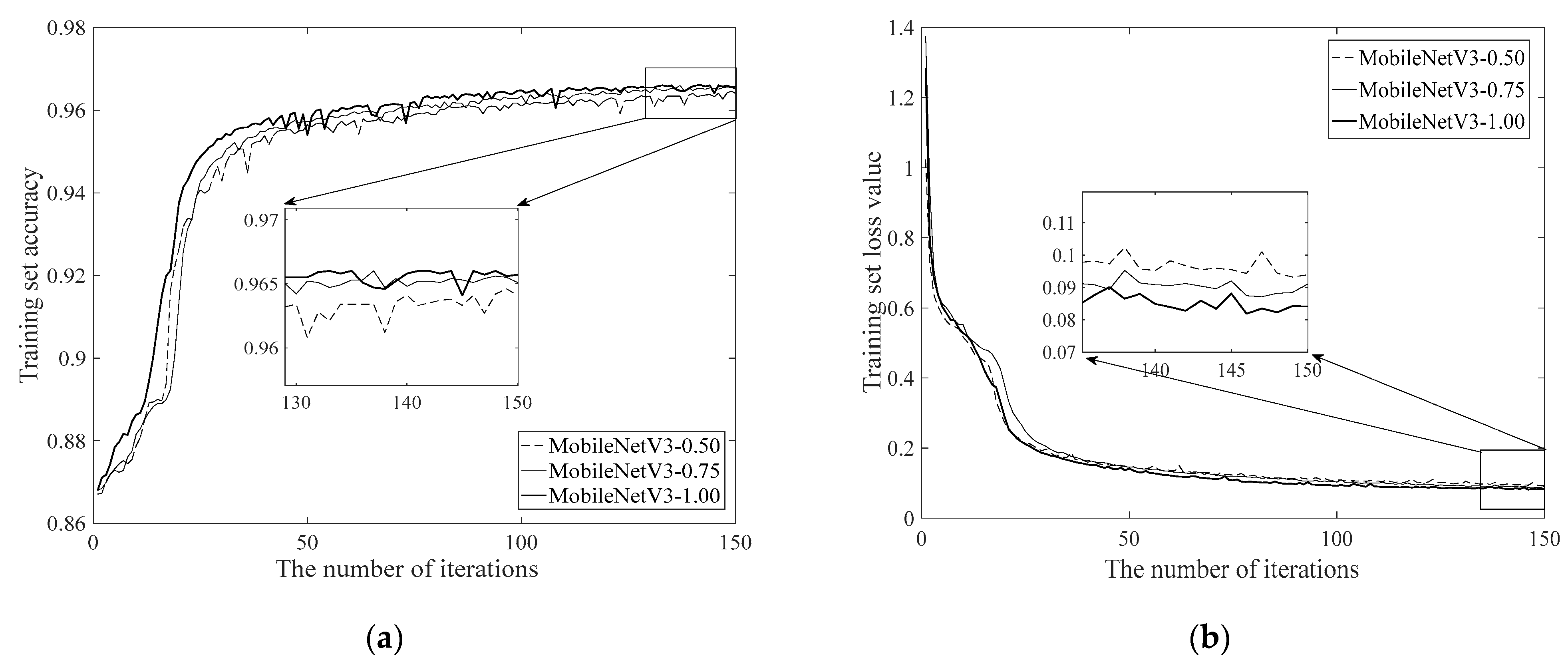
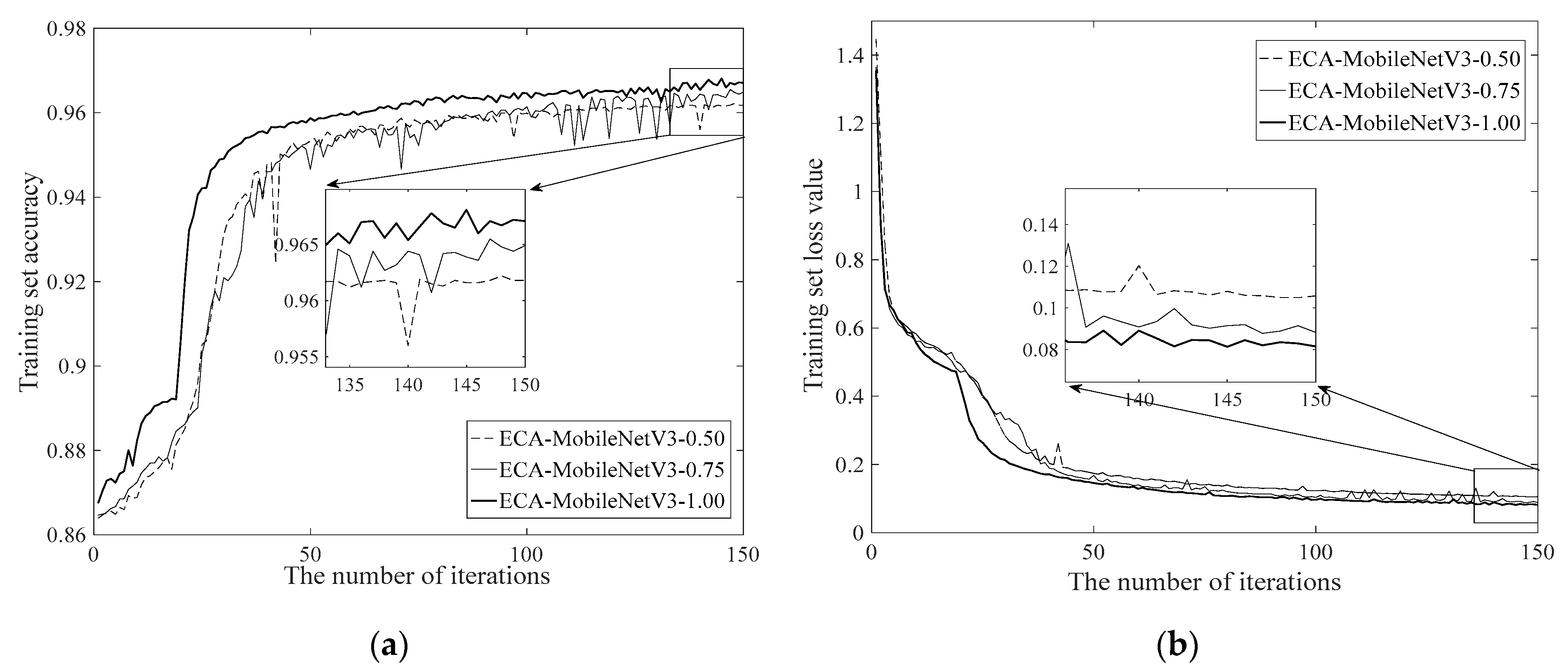
Based on the Beijing–Tianjin–Hebei airport cluster dataset, the accuracy and loss curves of the MobileNetV3 algorithm and ECA-MobileNetV3 algorithm under different channel factors are, respectively, presented in
Figure 7 and
Figure 8. According to the trend of the curves, at different channel factors, the accuracy rate gently increases while the loss value gently decreases. The loss values and accuracies of MobileNetV3 and ECA-MobileNetV3 tend to stabilize when the number of training rounds is around 150. From the experimental results, the MobileNetV3 algorithm has a loss value of about 0.0819 when the channel factor is 1.00. The highest accuracy was 96.60%. When the channel factor is 1.00, the lowest loss value of the ECA-MobileNetV3 algorithm is about 0.0813, and the highest accuracy is 96.81%. Compared with the MobileNetV3 algorithm, the accuracy of the ECA-MobileNetV3 algorithm with an attention mechanism is slightly improved, while the loss value is slightly decreased.
4.4. Complex Calculation of the Model
Validation will be performed on the Shanghai Hongqiao Airport dataset and the Beijing–Tianjin–Hebei Airport dataset.
Based on the Shanghai Hongqiao Airport dataset,
Table 6 displays the suggested algorithm’s accuracy and computational complexity before and after the enhancement. Vertically, as the channel factor increases, the MobileNetV3 algorithm’s accuracy rises together with the model’s complexity. The model complexity and accuracy of the ECA-MobileNetV3 algorithm increase with the channel factor. However, for channel factors of 0.75 and 1.0, the accuracy rate does not improve significantly due to the complexity of the model but gradually stabilizes. From a horizontal perspective, under the same channel factor, the ECA-MobileNetV3 model can efficiently minimize the number of parameters and computation without sacrificing accuracy.
Based on the Beijing–Tianjin–Hebei airport cluster dataset, the computational complexity and accuracy of the proposed algorithm before and after the improvement are shown in
Table 7. From the longitudinal point of view, as the channel factor increases, the complexity of the MobileNetV3 model increases and the accuracy improves. However, with channel factors of 0.75 and 1.00, the accuracy increases slightly and remains essentially stable. As the channel factor increases, the complexity of the ECA-MobileNetV3 model increases and the accuracy improves. When the channel factors are 0.75 and 1.0, the accuracy is significantly improved. From a horizontal perspective, the computational complexity of the ECA-MobileNetV3 model is effectively reduced with little loss in accuracy for the same channel factor.
It is clear from the experimental findings on the aforementioned two datasets that the computational cost and precision of the proposed model are not only linear. We can find algorithms that better balance the accuracy and computational complexity of the model, which is also the direction of efforts in lightweight neural networks. By computing conditions on different mobile devices, it is possible to match flight delay prediction models of different sizes to maximize the model utilization.
4.5. Comparison of Different Network Models
Compared with traditional deep learning algorithms, the modified ECA-MobileNetV3 achieves better performance in terms of computational complexity and model accuracy when dealing with real domestic flight datasets with weather information fusion. In this regard, this paper verifies the single airport and airport group datasets, compares the ECA-MobileNetV3_1.00 model with the traditional ResNet [
38], DenseNet [
39] algorithm, and MobileNetV2 algorithm under the same channel factor and analyzes it from the following three aspects. ResNet and DenseNet are models that have been trained and widely used in large-scale datasets and have achieved good results in many computer vision and natural language processing tasks. Therefore, they are very representative models and can be used as benchmarks for other models. MobileNetV2, as the leader in the lightweight model, has been widely used in many mobile device applications. MobileNetV2 is the predecessor of MobileNetV3, which can verify whether the improvement in ECA-MobileNetV3 is effective. Taking MobileNetV2 as a comparative test can also provide reference and inspiration for more lightweight model design. The results are shown in
Table 8.
In the Hongqiao Airport dataset, the accuracy of the ECA-MobileNetV3_1.00 algorithm increases by 3.34% and 3.96% and the number of citations decreases by 10.63 million and 6.49 million, respectively, compared to the other two traditional networks. The calculated amounts were reduced by 1375.64 million and 444.6 million, respectively. In the single airport dataset, it can be seen that the enhanced ECA-MobileNetV3 model outperforms in terms of accuracy and computational complexity. In addition, when compared to the MobileNetV2 method at the same channel factor, the accuracy of the enhanced algorithm is decreased by 0.16%, and the number of parameters and computational cost are decreased, respectively, by 171 million and 16.99 million. As compared to the MobileNetV2 algorithm at the same level, it can be seen that the upgraded algorithm achieves a better balance between model complexity and accuracy.
In the Beijing–Tianjin–Hebei airport cluster dataset, the accuracy of the ECA-MobileNetV3_1.00 model increases by 2.48% and 3.05% and the reference number decreases by 10.63 million and 6.49 million, respectively, compared to the other two traditional networks. The calculated amounts were reduced by 1547.63 million and 520.10 million, respectively. On the airport cluster dataset, it can be shown that the revised model performs quite well in the three evaluation measures mentioned above. Additionally, the ECA-MobileNetV3 algorithm’s accuracy is increased by 0.82% when compared to MobileNetV2 at the same channel factor, while the algorithm’s computational cost and parameter count are decreased by 1.71 million and 27.96 million, respectively. As is evident, the improved model also achieves a better balance of the above three metrics compared to the MobileNetV2 algorithm of the same level.
4.6. Application of the Model
At present, the flight delay prediction Web visualization system based on the flight delay prediction model of ECA-MobileNetV3 has been put into use in the air traffic control bureau. The system uses the flight delay prediction model studied in this paper to predict flight delay and then displays the predicted delay results on the web page through the Web visualization technology and can carry out statistical analysis on the historical delay information, so as to explore the deeper laws of delay generation, for example, to see in which time periods of the day and in which months of the year flight delays mainly occur. This application mainly takes advantage of the high prediction accuracy of the flight delay prediction model studied in this paper. The subsequent application direction will focus on the advantages of light weight. The lightweight model has the characteristics of fast prediction speed, less demand for computing resources, higher real-time performance, and portability. Therefore, this model can be deployed on some low-power devices, such as mobile devices and sensors. This can quickly process data input and quickly update forecast results and provide real-time information for airlines and the base to help them plan and manage flight missions.
5. Conclusions
This paper studies the lightweight neural network MobileNetV3 algorithm and the improved ECA-MobileNetV3 algorithm. By using the Shanghai Hongqiao Airport dataset and the Beijing–Tianjin–Hebei Airport Cluster dataset, for example, analysis and practical application of the model, the following conclusions are drawn: The algorithm proposed in this paper can effectively reduce the computational complexity in the model without loss of accuracy or with a small loss of accuracy by replacing the SE module in the original MobileNetV3 algorithm with a lightweight ECA attention mechanism module. Compared with the ResNet algorithm, DenseNet algorithm, and MobileNetV2 algorithm under the same channel factor, the improved ECA-MobileNetV3 algorithm has more advantages in computational complexity and accuracy. The flight delay prediction model based on ECA-the MobileNetV3 algorithm has the advantage of light weight compared with the flight delay prediction model that has been deployed now. The lightweight flight delay model can bring faster execution speed, fewer computing resources, higher real-time performance, and higher flexibility and portability, which can greatly lay the foundation for subsequent deployment on mobile terminals and other platform devices, and for airlines, the airport and passengers provide better service and better experience. However, there is still a lot of room for improvement in the process of research in this paper. On the one hand, the number of flight samples with different delay levels is quite different, which will affect the accuracy of flight prediction. It is necessary to consider the impact of sample imbalance on model training. On the other hand, the problem of flight delay is time-varying, and the prediction model needs to be updated at any time. The next step is to explore how to achieve a real-time update of the model and improve the practicability of the model.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}