
Friction Feedforward Compensation Composite Control of Continuous Rotary Motor with Sliding Mode Variable Structure Based on an Improved Power Reaching Law


Abstract
:1. Introduction
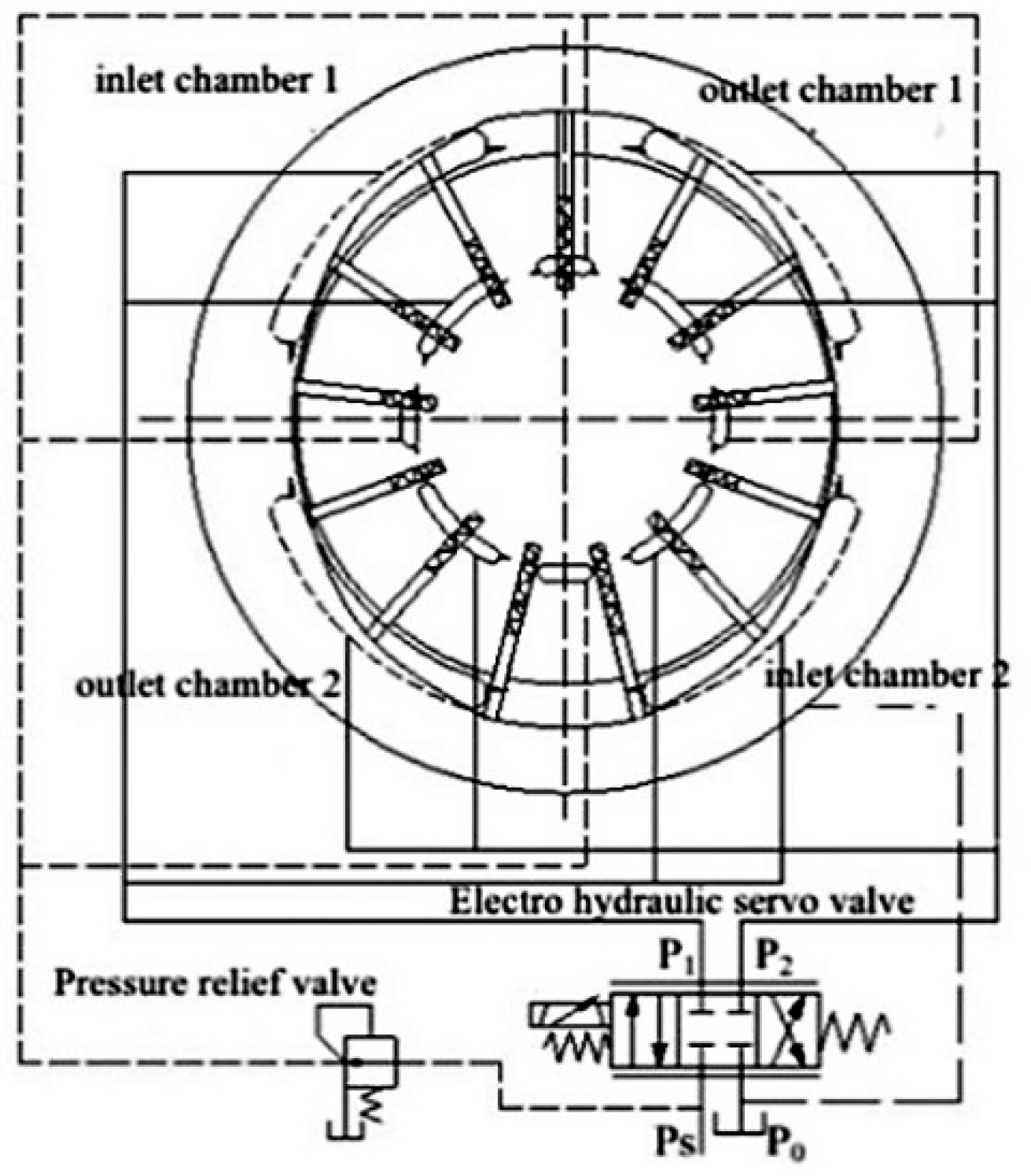
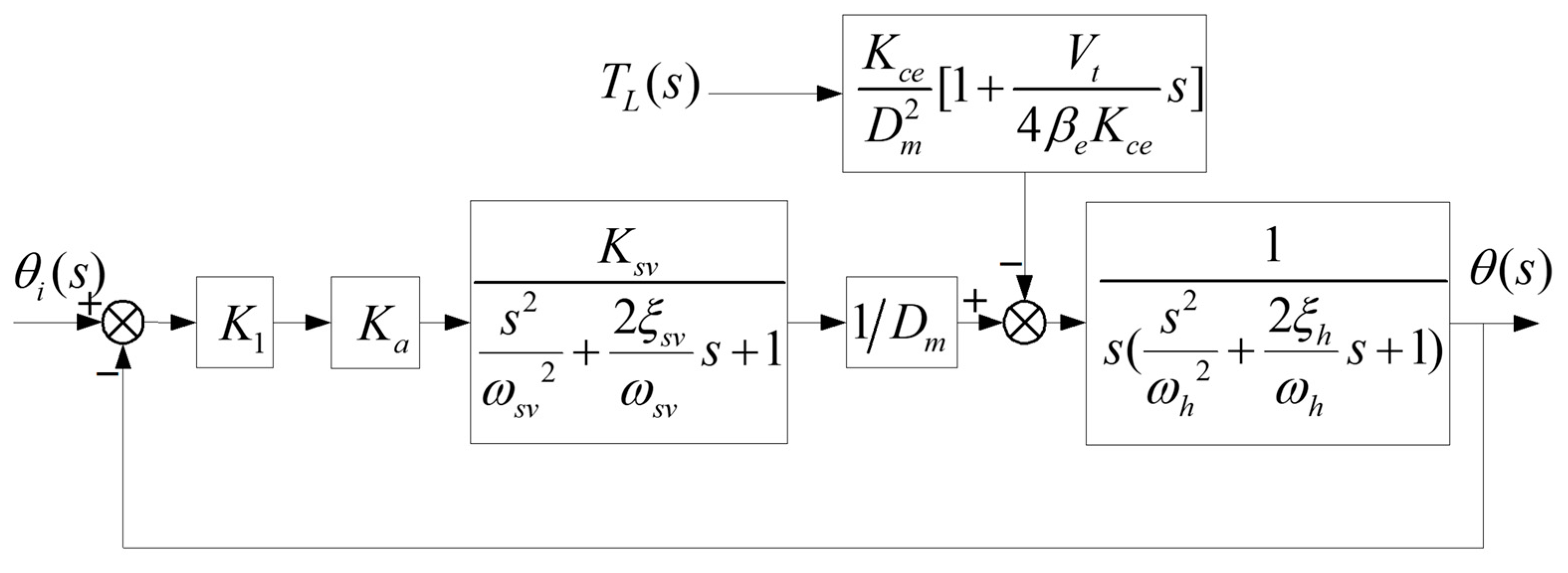
2. Continuous Rotary Motor State Space Modeling
3. Continuous Rotary Motor Friction Torque Modeling and Compensation
3.1. Continuous Friction Model
- (1)
- The model is symmetrical about the origin and applies to the motor’s bi-directional rotational state;
- (2)
- The static friction factor can be described when k6 = 0, where captures the Stribeck phenomenon, where the friction factor decreases as the speed of the motor system continues to increase;
- (3)
- is viscous friction, capturing the viscosity resistance between the relative moving parts of the motor due to the viscosity of the lubricant;
- (4)
- indicates Coulomb friction and exists in a motor system without viscous friction.
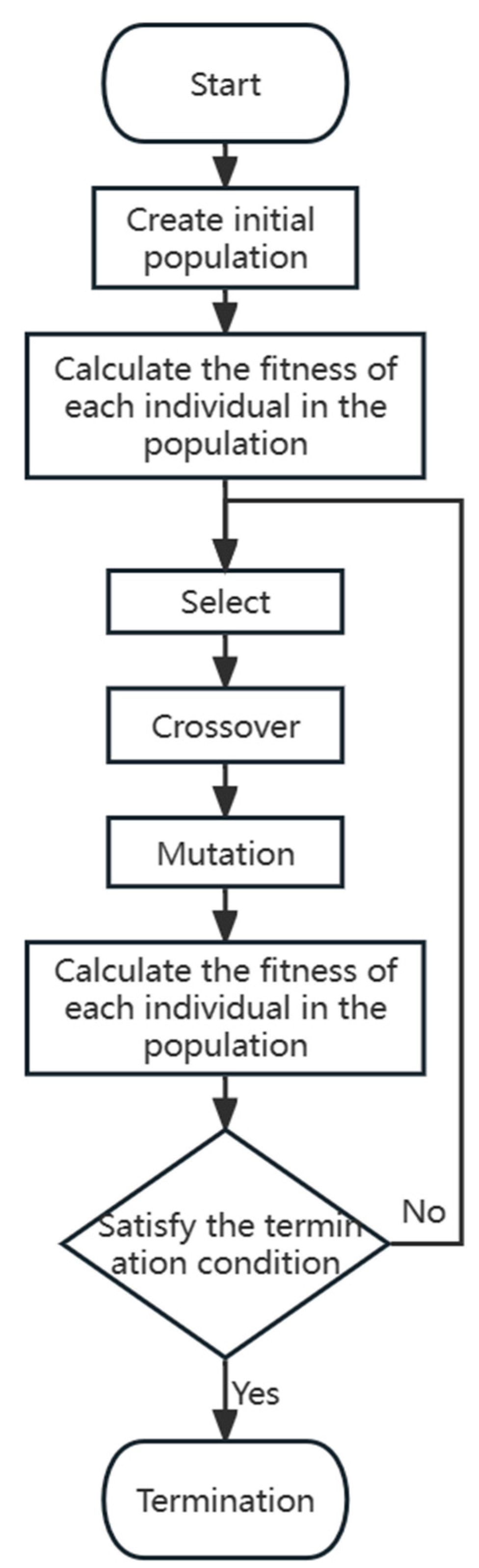
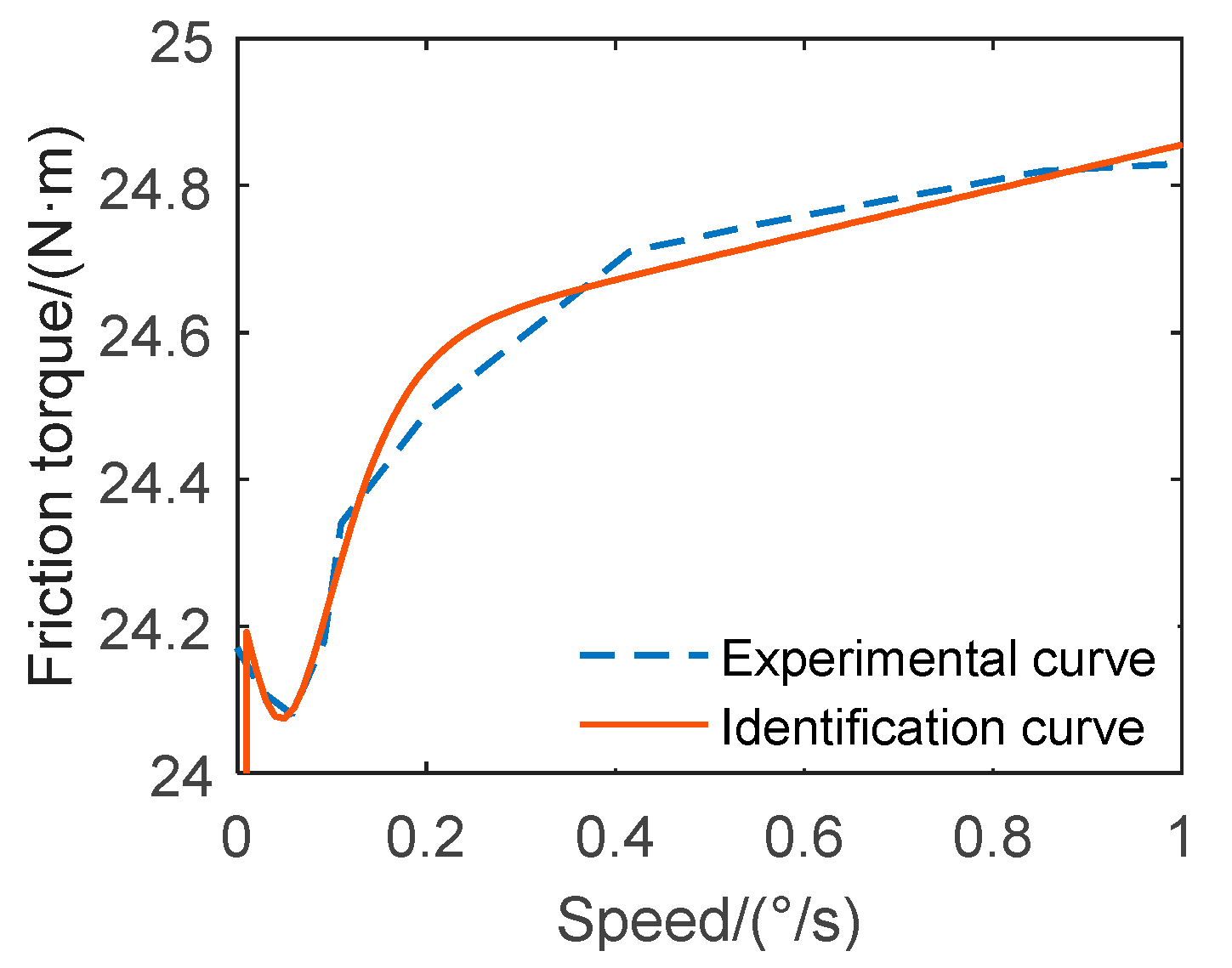
3.2. Identification of Friction Model Parameters
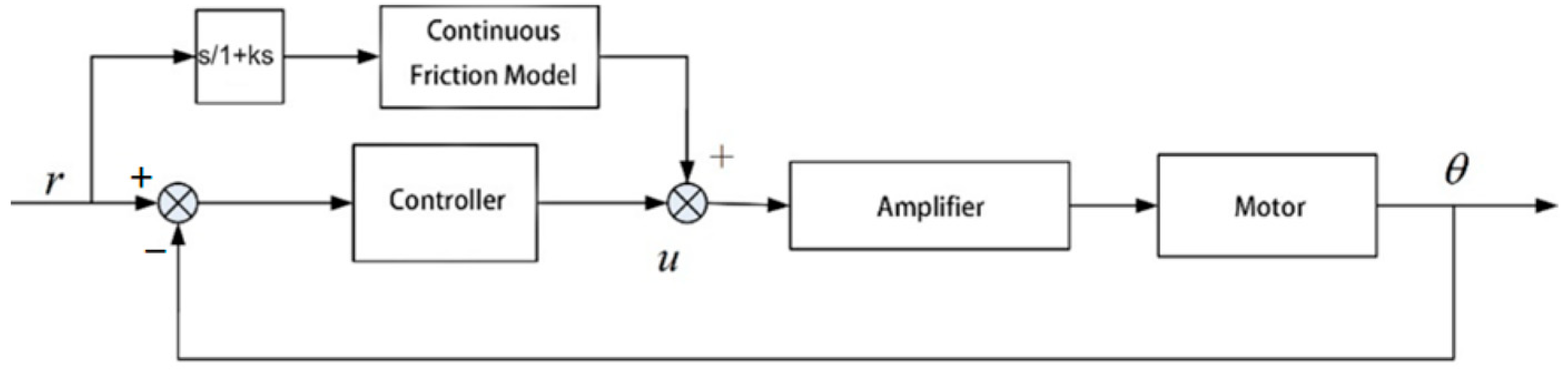
3.3. Friction Compensation
4. Sliding Mode Variable Structure Controller Based on Improved Power Reaching Law
4.1. Reaching Laws
4.2. Application of Reaching Laws
4.3. Improving the Power Reaching Law
5. Simulations
5.1. Determination of System Modal Parameters
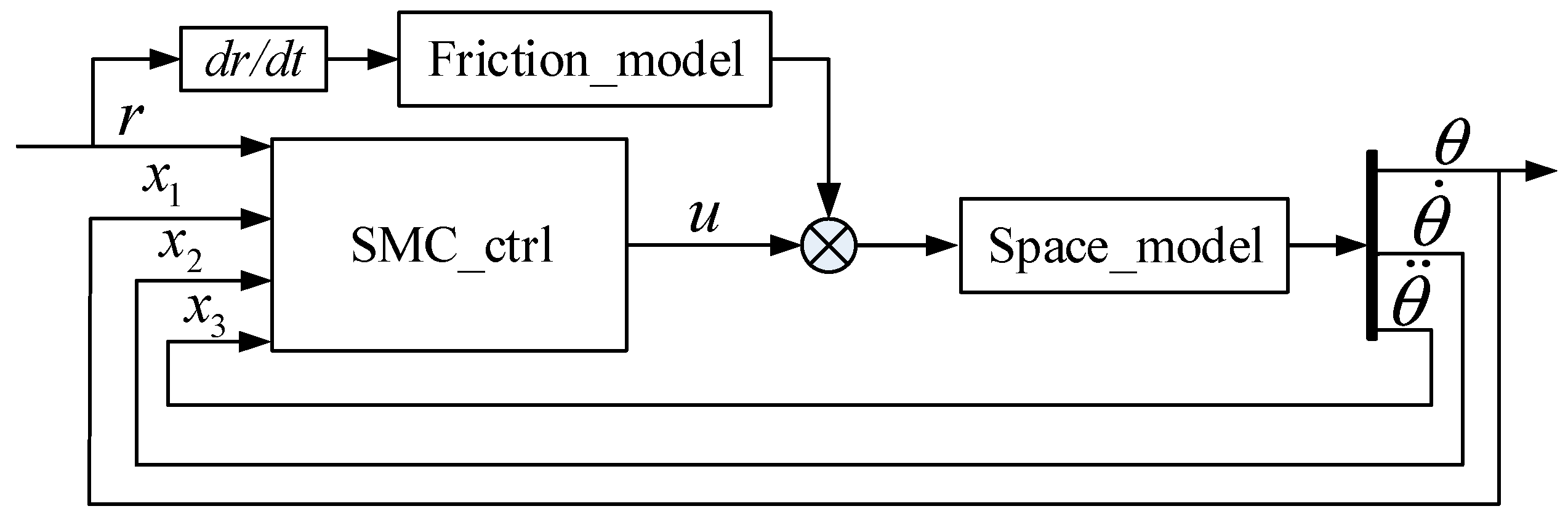
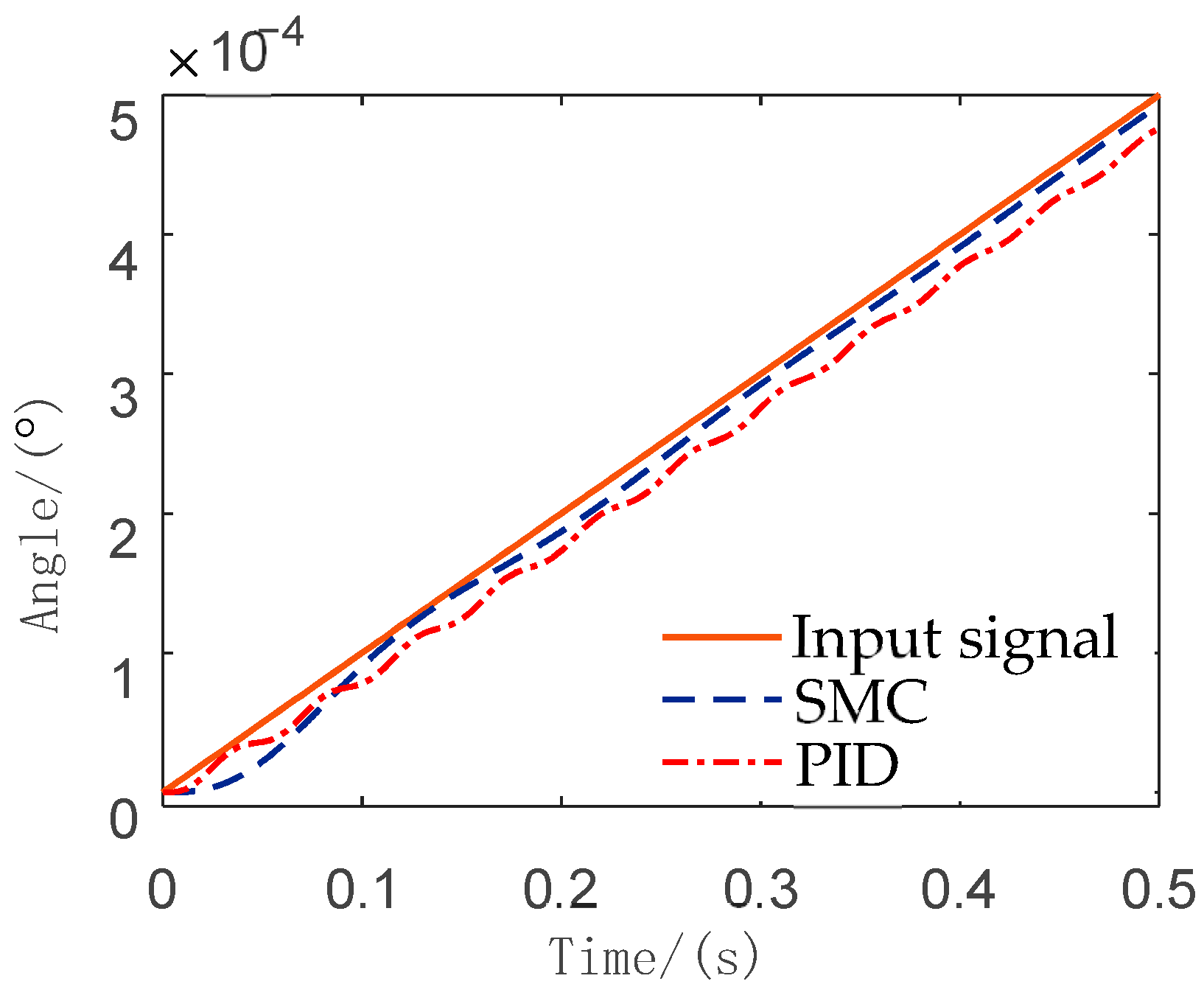
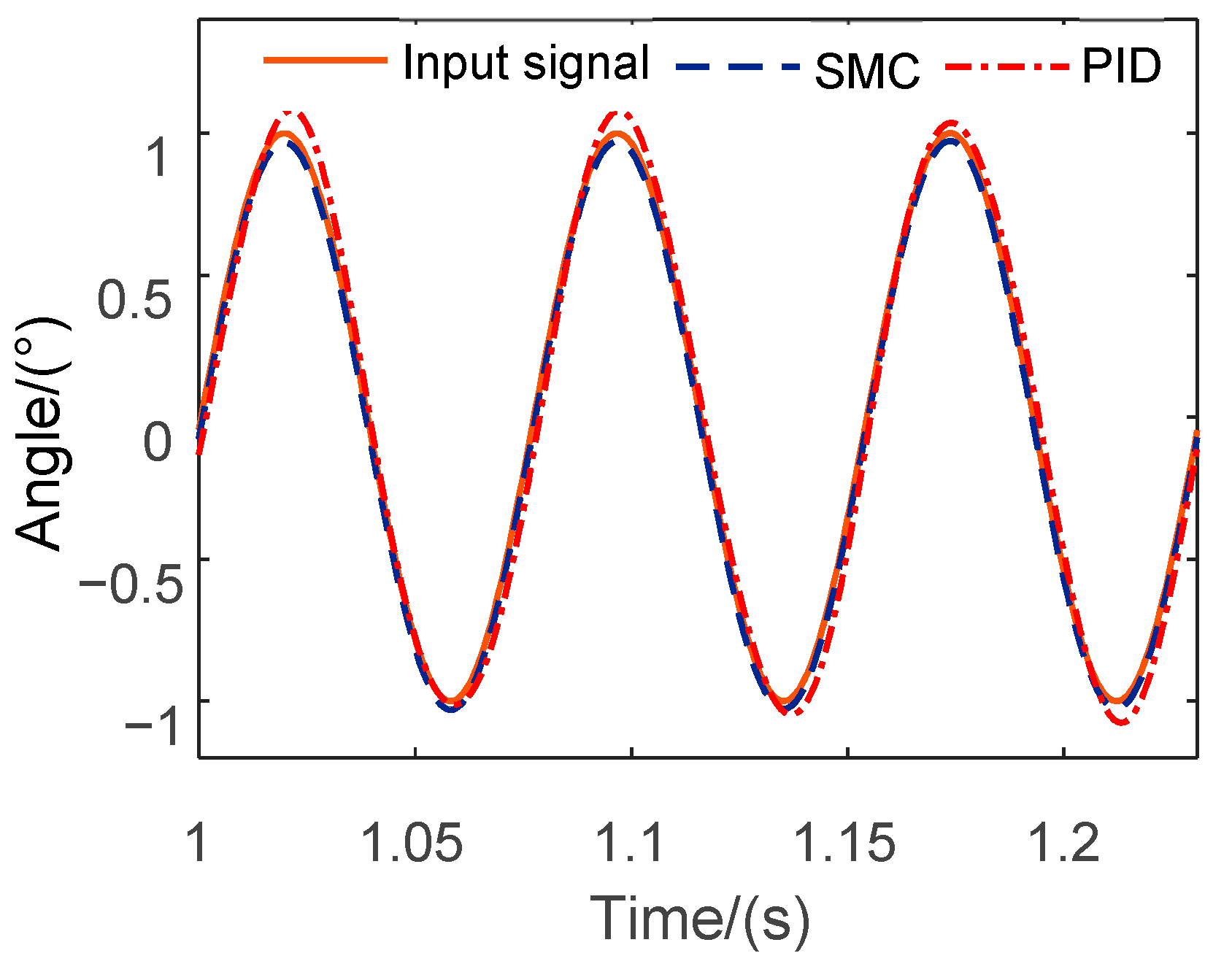
5.2. Simulink Simulation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, X.J. Continuous Rotary Motor Electro-hydraulic Servo System Based on the Improved Repetitive Controller. J. Harbin Inst. Technol. 2010, 5, 731–734. [Google Scholar]
- Li, C.; Yan, Y.; Yang, Y. The Coordinate System Design and Implementation of the Spacecraft’s Attitude Simulation based on Five Axis Turntable. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference, IAEAC, Chongqing, China, 12–14 October 2018; pp. 388–393. [Google Scholar]
- Feng, W. Research on the Control Performance of Large Displacement Continuous Rotary Electro-Hydraulic Servo Motor. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2011. Volume 3. pp. 1–26. [Google Scholar]
- Ma, Y. Application of QFT in the Control System of Continuous Rotary Electro-Hydraulic Servo Motor. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2008. Volume 6. pp. 7–11. [Google Scholar]
- Wensel, R.G.; Metcalfe, R.; Pothier, N.E.; Russell, B.G. O-ring Seal Studies for Space Shuttle Solid Rocket Booster Joints. Can. Aeronaut. Space J. 1988, 34, 204–212. [Google Scholar]
- Wei, L.J.; Han, S.X.; Xiong, Q.H.; Lv, L.; Duan, J. Effect of O-ring seal groove chamfer radius on sealing performance. Hydraul. Pneum. Seals 2016, 36, 72–75. [Google Scholar]
- Nikas, G.K.; Burridge, G.; Sayles, R.S. Modelling and Optimization of Rotary Vane Seals. ARCHIVE Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2007, 221, 699–715. [Google Scholar] [CrossRef]
- Li, G.; Zhao, Q.; Li, Y.; Guo, B. Research on the sealing structure of electro-hydraulic servo oscillating motor. Lubr. Seal. 2015, 40, 9–13. [Google Scholar]
- Peng, Y.; Yu, X.; Tan, L. Research on friction characteristics and compensation of feed servo system based on improved Dahl model. Mod. Manuf. Eng. 2014, 114, 117–121. [Google Scholar]
- Simoni, L.; Beschi, M.; Visioli, A.; Åström, K.J. Inclusion of the Dwell Time Effect in the LuGre Friction Model. Mechatronics 2020, 66, 102345–102352. [Google Scholar] [CrossRef]
- Ni, F.; Liu, H.; Kai, D. Identification and compensation of GMS friction model based on speed observer. J. Electr. Mach. Control 2012, 16, 70–75. [Google Scholar]
- Li, Y.; Zeng, Y.; Pan, Q.; Jiang, X. Friction model of hydraulic cylinder considering pressure effect. J. Agric. Mach. 2020, 51, 418–426. [Google Scholar]
- Jiang, W.D.; Wang, H.T.; Zhang, S.H.; Ge, H.X.; Zhou, Z.D. Study of Buck converter sliding mode control method based on improved power reaching law. Electr. Drives 2021, 51, 58–63. [Google Scholar]
- Huo, A.; Zhang, S.; Wu, S. Sliding Mode Variable Structure Control of the Steerable Drilling Stabilized Platform Based on Disturbance Observer. J. Phys. Conf. Ser. 2021, 1894, 012033–012041. [Google Scholar] [CrossRef]
- Huang, X.P.; Ma, D.; Chen, X. Sliding Mode Variable Structure Control on Vienna Rectifier. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Makkar, C.; Dixon, W.E.; Sawyer, W.G.; Hu, G. A New Continuously Differentiable Friction Model for Control Systems Design. In Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 600–605. [Google Scholar]
- Stotsky, A. Adaptive Estimation of the Engine Friction Torque. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]
- Stotsky, A.A. Data-driven algorithms for engine friction estimation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2006, 221, 901–909. [Google Scholar] [CrossRef]
- Slotinej, J.; Sastrys, S. Tracking Control of Non-Linear Systems Using Sliding Surfaces, with Application to Robot Manipulators. Int. J. Control 1983, 38, 465–492. [Google Scholar] [CrossRef] [Green Version]
- Qin, T.; Lu, D.L.; Zheng, G.J.; Lei, X.; Wang, T. Study on the sliding mode variable structure control of a stable aiming system based on PSO. Mod. Manuf. Technol. Equip. 2020, 56, 49–53. [Google Scholar]
- Rakhtala, S.M.; Ahmadi, M. Twisting control algorithm for the yaw and pitch tracking of a twin rotor UAV. In Proceedings of the 2015 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 5–6 November 2015; pp. 276–284. [Google Scholar]
- Hou, H.; Yu, X.; Xu, L.; Rsetam, K.; Cao, Z. Finite-Time Continuous Terminal Sliding Mode Control of Servo Motor Systems. IEEE Trans. Ind. Electron. 2020, 67, 5647–5656. [Google Scholar] [CrossRef]
- Li, G.; Ding, Y.; Feng, Y.; Li, Y. AMESim simulation and energy control of hydraulic control system for direct drive electro-hydraulic servo die forging hammer. Int. J. Hydromechatronics 2019, 2, 203–225. [Google Scholar] [CrossRef]
- Kato, T.; Xu, Y.; Tanaka, T.; Shimazaki, K. Force control for ultraprecision hybrid electric-pneumatic vertical-positioning device. Int. J. Hydromechatronics 2021, 4, 185–201. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameters | k1 | k2 | k3 | k4 | k5 | k6 |
|---|---|---|---|---|---|---|
| Parameter values | 24.26 | −12.77 | −468.3 | 24.55 | 12.34 | 0.3057 |
| X | 0 | 0.027 | 0.058 | 0.092 | 0.11 | 0.2 | 0.415 | 0.562 | 0.854 | 1 |
| Y | 24.17 | 24.11 | 24.08 | 24.18 | 24.34 | 24.49 | 24.71 | 24.75 | 24.82 | 24.83 |
| Reaching Law (Math.) | Mathematical Expressions |
|---|---|
| Isokinetic reaching law | |
| Exponential reaching law | |
| Power reaching law | |
| Variable speed reaching law |
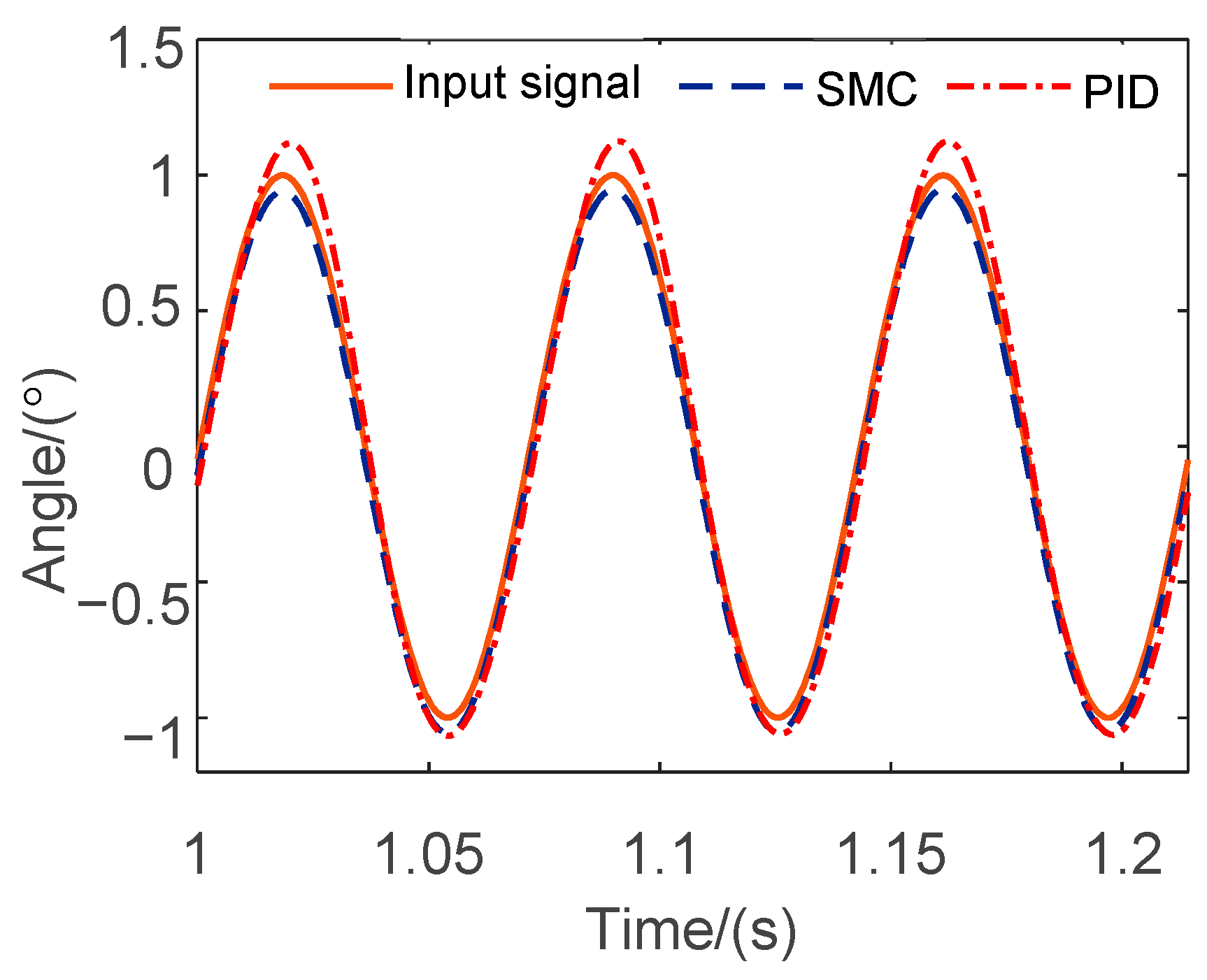
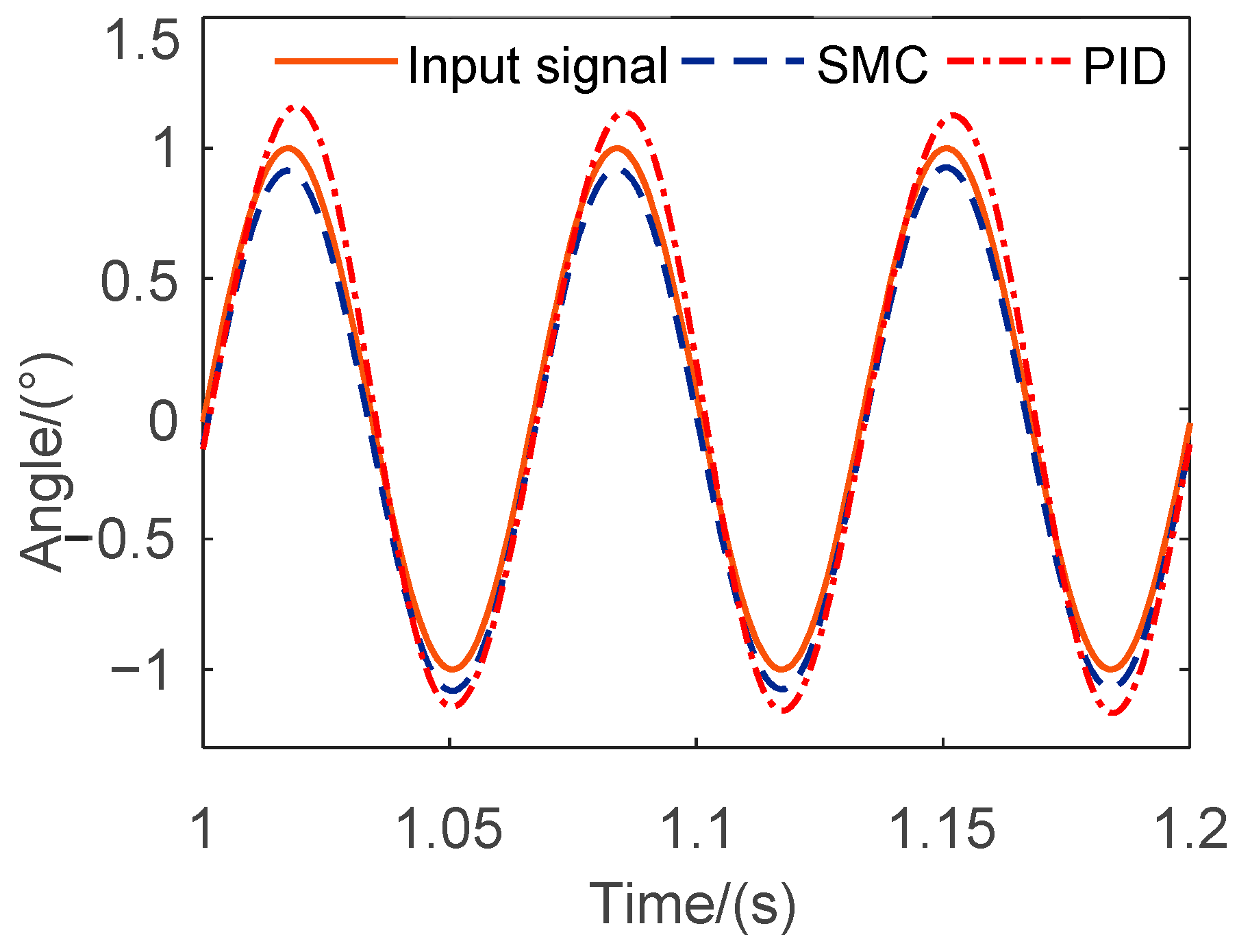
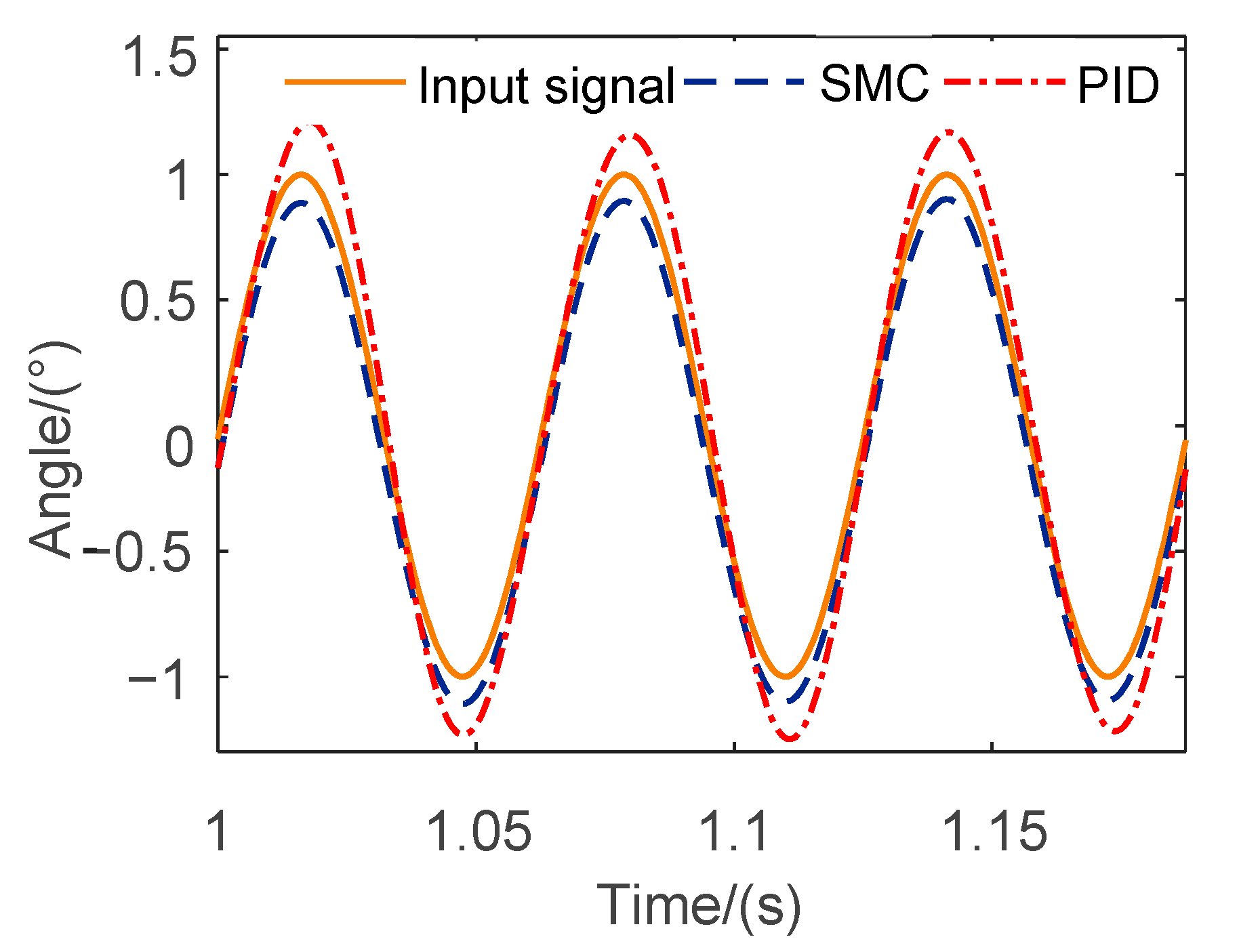
| Frequency/Hz | Magnitude Error/% | Phase Error/° | ||
|---|---|---|---|---|
| PID | SMC | PID | SMC | |
| 13 | 7.1 | 3.5 | 5.381 | 1.872 |
| 14 | 11.8 | 5.9 | 5.542 | 3.526 |
| 15 | 16.1 | 8.6 | 5.758 | 4.858 |
| 16 | 20 | 11.3 | 5.937 | 6.333 |
| PID | SMC | |
|---|---|---|
| Scheme 5 | 5.0805 × 10−7 | 8.9490 × 10−8 |
| MSE | 6.8143 × 10−7 | 2.9915 × 10−7 |
| MAE | 2.1814 × 10−5 | 8.0668 × 10−6 |
| RMSE | 2.2028 × 10−5 | 9.4552 × 10−6 |
| MAPE | 0.0074 | 0.0078 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Bai, B.; Feng, Y. Friction Feedforward Compensation Composite Control of Continuous Rotary Motor with Sliding Mode Variable Structure Based on an Improved Power Reaching Law. Electronics 2023, 12, 1447. https://doi.org/10.3390/electronics12061447
Wang X, Bai B, Feng Y. Friction Feedforward Compensation Composite Control of Continuous Rotary Motor with Sliding Mode Variable Structure Based on an Improved Power Reaching Law. Electronics. 2023; 12(6):1447. https://doi.org/10.3390/electronics12061447
Chicago/Turabian StyleWang, Xiaojing, Bocheng Bai, and Yaming Feng. 2023. "Friction Feedforward Compensation Composite Control of Continuous Rotary Motor with Sliding Mode Variable Structure Based on an Improved Power Reaching Law" Electronics 12, no. 6: 1447. https://doi.org/10.3390/electronics12061447
APA StyleWang, X., Bai, B., & Feng, Y. (2023). Friction Feedforward Compensation Composite Control of Continuous Rotary Motor with Sliding Mode Variable Structure Based on an Improved Power Reaching Law. Electronics, 12(6), 1447. https://doi.org/10.3390/electronics12061447