


Supervised Learning Spectrum Sensing Method via Geometric Power Feature


Abstract
:1. Introduction
2. Model
2.1. System Model
2.2. Noise Model
3. Signal Characteristics Analysis
3.1. Energy Statistics (ES)
3.2. Differential Entropy (DE)
3.3. Geometric Power (GP)
4. Supervised Learning
4.1. Support Vector Machines (SVM)
4.2. K-Nearest Neighbors (KNN)
5. Experimental Simulation and Result Discussion
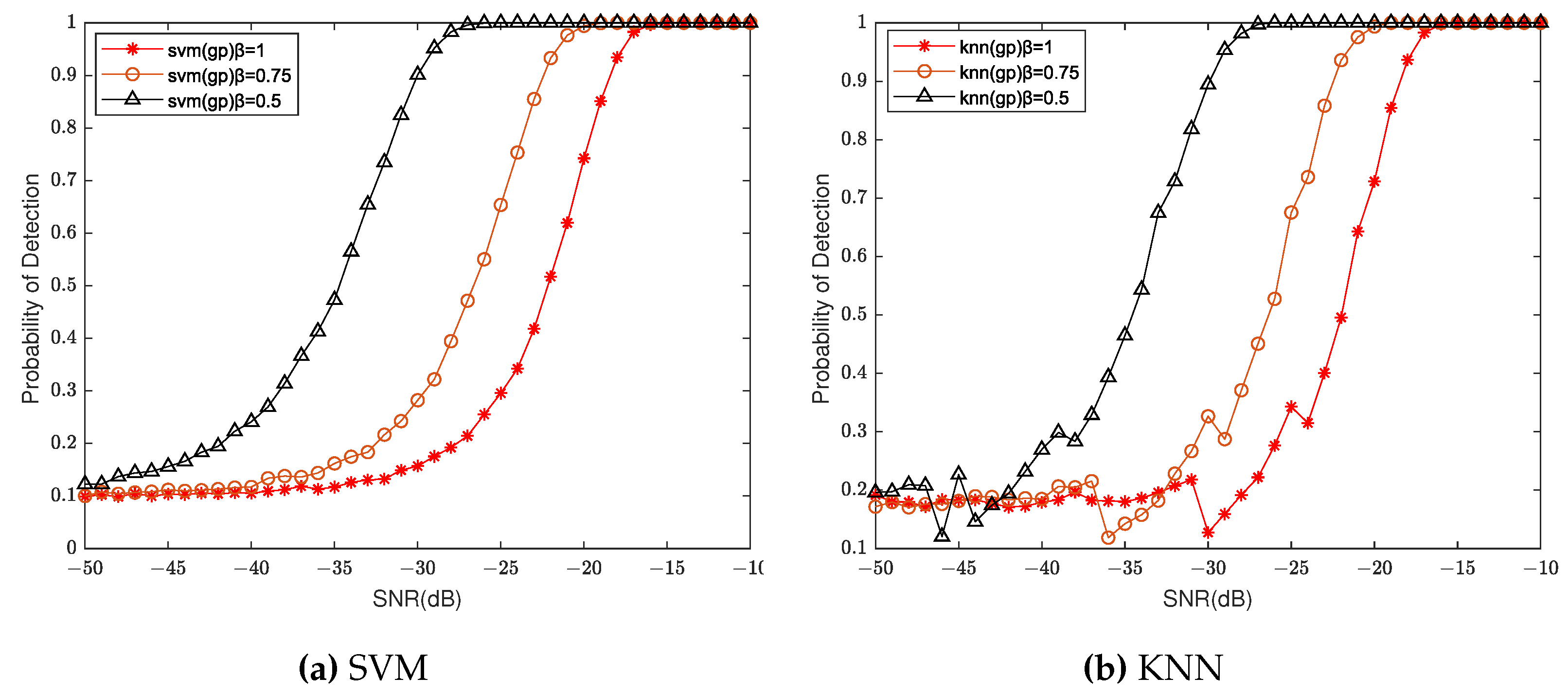
5.1. Selection of Shape Parameter
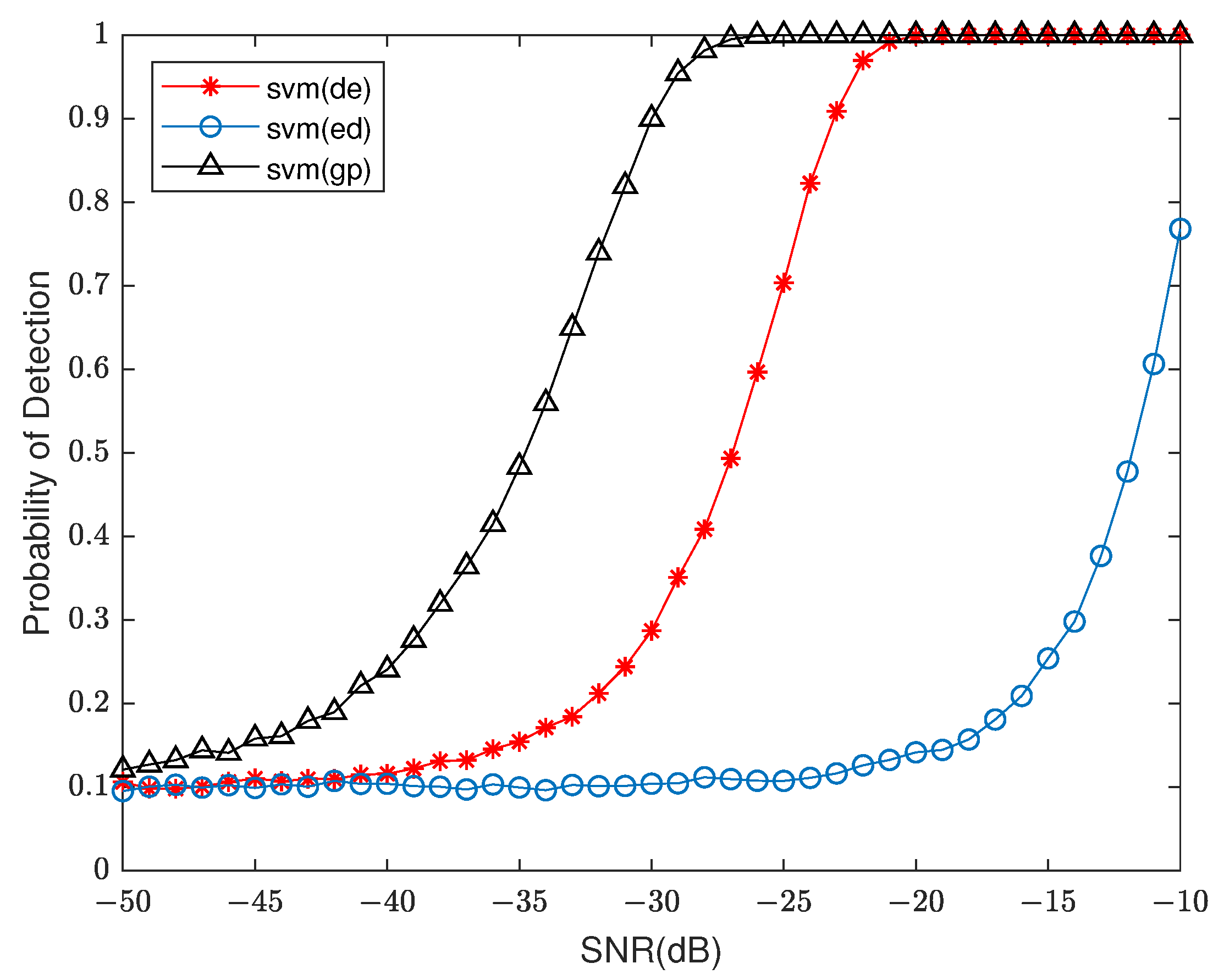
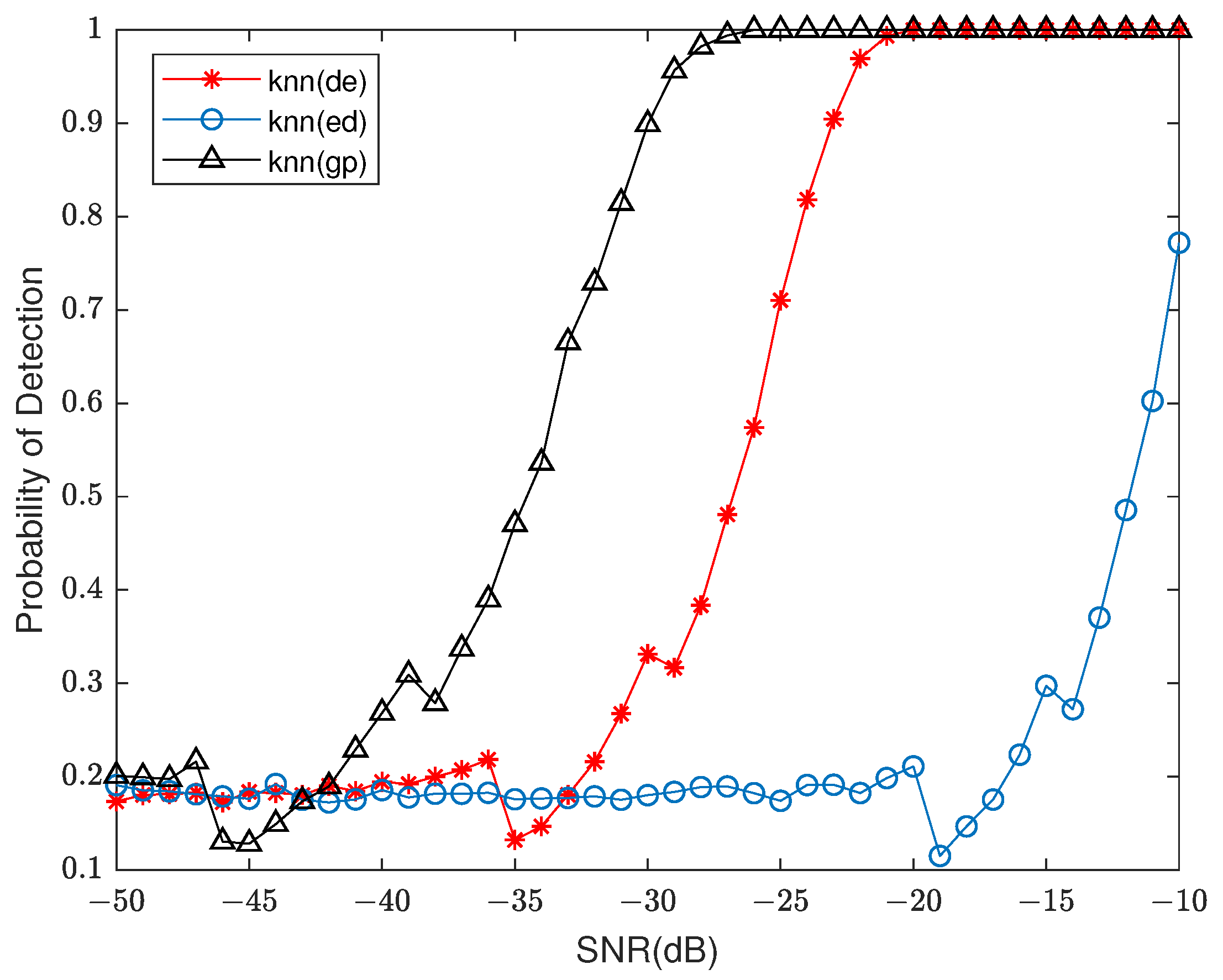
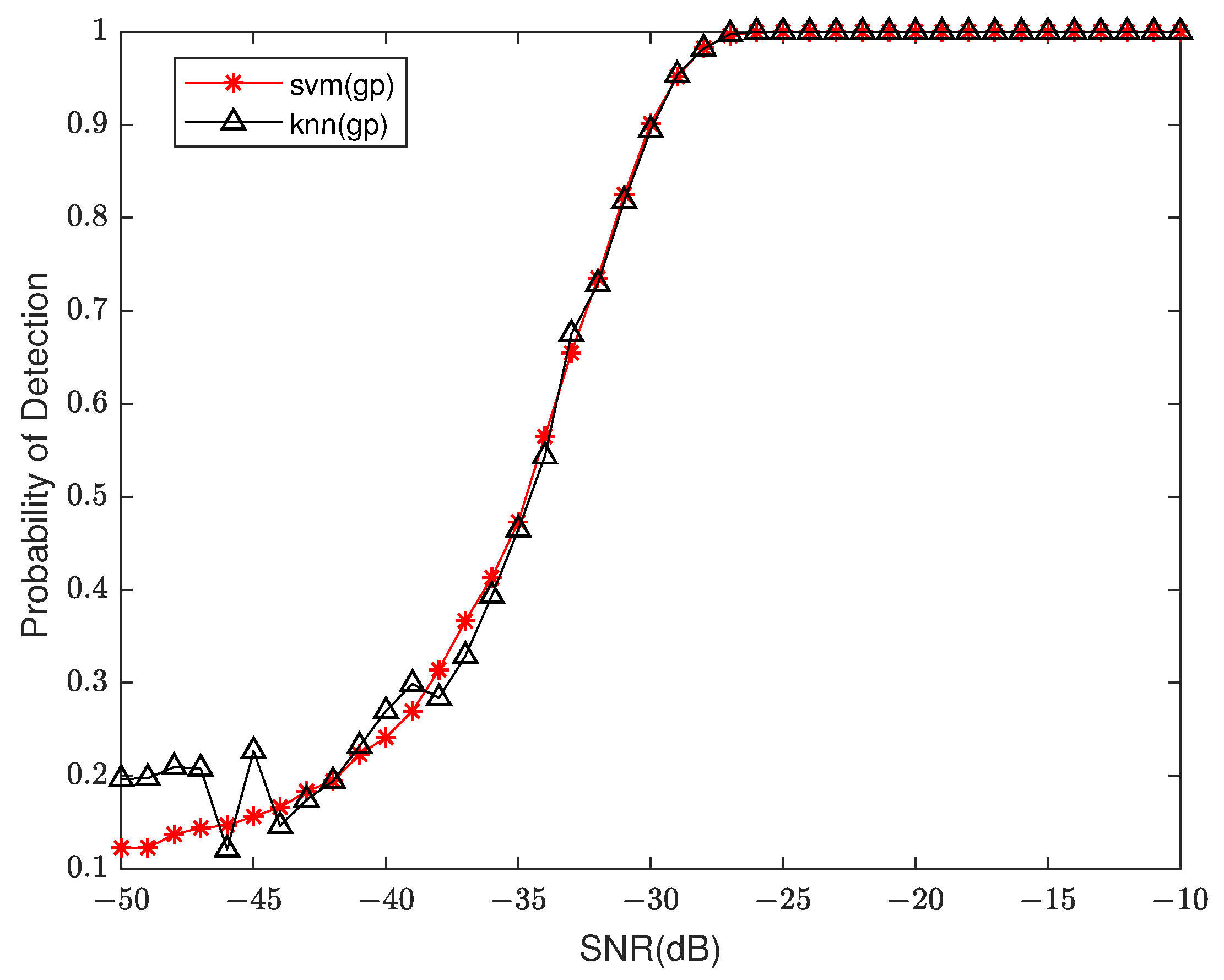
5.2. Performance Comparison
6. Results
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nasrallah, A.; Hamza, A.; Messani, A. Robust Spectrum Sensing Using Moving Blocks Energy Detector with Bootstrap. J. Commun. Technol. Electron. 2022, 67, 636–648. [Google Scholar] [CrossRef]
- Arjoune, Y.; El Mrabet, Z.; El Ghazi, H.; Tamtaoui, A. Spectrum sensing: Enhanced energy detection technique based on noise measurement. In Proceedings of the 2018 IEEE 8th annual computing and communication workshop and conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 828–834. [Google Scholar]
- Salama, U.; Sarker, P.L.; Chakrabarty, A. Enhanced energy detection using matched filter for spectrum sensing in cognitive radio networks. In Proceedings of the 2018 Joint 7th International Conference on Informatics, Electronics & Vision (ICIEV) and 2018 2nd International Conference on Imaging, Vision & Pattern Recognition (icIVPR), virtual, 19–25 June 2018; pp. 185–190. [Google Scholar]
- Salahdine, F.; El Ghazi, H.; Kaabouch, N.; Fihri, W.F. Matched filter detection with dynamic threshold for cognitive radio networks. In Proceedings of the 2015 international conference on wireless networks and mobile communications (WINCOM), Marrakech, Morocco, 20–23 October 2015; pp. 1–6. [Google Scholar]
- Shrestha, R.; Telgote, S.S. A short sensing-time cyclostationary feature detection based spectrum sensor for cognitive radio network. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Sevilla, Spain, 10–21 October 2020; pp. 1–5. [Google Scholar]
- Sherbin, K.; Sindhu, V. Cyclostationary feature detection for spectrum sensing in cognitive radio network. In Proceedings of the 2019 International Conference on Intelligent Computing and Control Systems (ICCS), Madurai, India, 15–17 May 2019; pp. 1250–1254. [Google Scholar]
- Coluccia, A.; Fascista, A.; Ricci, G. Spectrum sensing by higher-order SVM-based detection. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), Coruña, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar]
- Bao, J.; Nie, J.; Liu, C.; Jiang, B.; Zhu, F.; He, J. Improved blind spectrum sensing by covariance matrix Cholesky decomposition and RBF-SVM decision classification at low SNRs. IEEE Access 2019, 7, 97117–97129. [Google Scholar] [CrossRef]
- Saber, M.; El Rharras, A.; Saadane, R.; Aroussi, H.K.; Wahbi, M. Artificial neural networks, support vector machine and energy detection for spectrum sensing based on real signals. Int. J. Commun. Netw. Inf. Secur. 2019, 11, 52–60. [Google Scholar] [CrossRef]
- Jan, S.U.; Vu, V.H.; Koo, I.S. Performance analysis of support vector machine-based classifier for spectrum sensing in cognitive radio networks. In Proceedings of the 2018 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC), Zhengzhou, China, 18–20 October 2018; pp. 385–3854. [Google Scholar]
- Tamilselvi, T.; Rajendran, V. Comparative Study of SVM and KNN Machine Learning Algorithm for Spectrum Sensing in Cognitive Radio. In Intelligent Communication Technologies and Virtual Mobile Networks: Proceedings of ICICV 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 517–527. [Google Scholar]
- Saber, M.; El Rharras, A.; Saadane, R.; Kharraz, A.H.; Chehri, A. An optimized spectrum sensing implementation based on SVM, KNN and TREE algorithms. In Proceedings of the 2019 15th International Conference on Signal-Image Technology & Internet-Based Systems (SITIS), Sorrento, Italy, 26–29 November 2019; pp. 383–389. [Google Scholar]
- An, C.; Zhang, D.; Yuan, C.; Li, L.; Zhao, X.; Geng, S.; Zheng, W.; Shao, W. Spectrum sensing based on KNN algorithm for 230 MHz power private networks. In Proceedings of the 2018 12th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Hangzhou, China, 3–6 December 2018; pp. 1–4. [Google Scholar]
- Inamdar, M.A.; Kumaraswamy, H. Accurate primary user emulation attack (PUEA) detection in cognitive radio network using KNN and ANN classifier. In Proceedings of the 2020 4th International Conference on Trends in Electronics and Informatics (ICOEI)(48184), Tirunelveli, India, 15–17 June 2020; pp. 490–495. [Google Scholar]
- Xu, Y.; Cheng, P.; Chen, Z.; Li, Y.; Vucetic, B. Mobile collaborative spectrum sensing for heterogeneous networks: A Bayesian machine learning approach. IEEE Trans. Signal Process. 2018, 66, 5634–5647. [Google Scholar] [CrossRef]
- Liu, X.; Sun, C.; Zhou, M.; Wu, C.; Peng, B.; Li, P. Reinforcement learning-based multislot double-threshold spectrum sensing with Bayesian fusion for industrial big spectrum data. IEEE Trans. Ind. Inform. 2020, 17, 3391–3400. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, X.; Ding, H.; Peng, B. Intelligent clustering cooperative spectrum sensing based on Bayesian learning for cognitive radio network. Hoc Netw. 2019, 94, 101968. [Google Scholar] [CrossRef]
- Arjoune, Y.; Kaabouch, N. Wideband spectrum sensing: A Bayesian compressive sensing approach. Sensors 2018, 18, 1839. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tavares, C.H.A.; Abrão, T. Bayesian estimators for cooperative spectrum sensing in cognitive radio networks. In Proceedings of the 2017 IEEE URUCON, Montevideo, Uruguay, 23–25 October 2017; pp. 1–4. [Google Scholar]
- Zhao, X.; Li, F. Sparse Bayesian compressed spectrum sensing under Gaussian mixture noise. IEEE Trans. Veh. Technol. 2018, 67, 6087–6097. [Google Scholar] [CrossRef]
- Saravanan, P.; Chandra, S.S.; Upadhye, A.; Gurugopinath, S. A supervised learning approach for differential entropy feature-based spectrum sensing. In Proceedings of the 2021 Sixth International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 25–27 March 2021; pp. 395–399. [Google Scholar]
- Valadão, M.D.; Amoedo, D.; Costa, A.; Carvalho, C.; Sabino, W. Deep cooperative spectrum sensing based on residual neural network using feature extraction and random forest classifier. Sensors 2021, 21, 7146. [Google Scholar] [CrossRef] [PubMed]
- Tan, C.; Chen, J.; Chen, S.; Li, C.; Liu, H.; Zheng, M. Combination Spectrum Sensing Algorithm for Wireless Sensor Network Based on Random Forest. In Proceedings of the 2022 10th International Conference on Intelligent Computing and Wireless Optical Communications (ICWOC), Chongqing, China, 10–12 June 2022; pp. 1–5. [Google Scholar]
- Gao, Z.; Wang, X. Spectrum Sensing Algorithm Based on Random Forest in Dynamic Fading Channel. In Advances in Simulation and Process Modelling: Proceedings of the 2nd International Symposium on Simulation and Process Modelling (ISSPM 2020) 2; Springer: Singapore, 2021; pp. 39–46. [Google Scholar]
- Liu, J.; Mu, H.; Vakil, A.; Ewing, R.; Shen, X.; Blasch, E.; Li, J. Human occupancy detection via passive cognitive radio. Sensors 2020, 20, 4248. [Google Scholar] [CrossRef] [PubMed]
- Wajhal, G.; Dehalwar, V.; Jha, A.; Ogura, K.; Kolhe, M.L. Proactive Handoff of Secondary User in Cognitive Radio Network Using Machine Learning Techniques. In Proceedings of International Conference on Intelligent Computing, Information and Control Systems, Madurai, India, 3–15 May 2020; Pandian, A.P., Palanisamy, R., Ntalianis, K., Eds.; ICICCS: Singapore, 2021; pp. 9–22. [Google Scholar]
- Chen, J.; Chen, H. Parameter estimation method of alpha stable distribution based on zero order statistics. Electron. Inf. Countermeas. Technol. 2017, 32, 6. [Google Scholar]
- Gonzalez, J.G.; Griffith, D.W.; Arce, G.R. Zero-order statistics: A signal processing framework for very impulsive processes. In Proceedings of the IEEE Signal Processing Workshop on Higher-Order Statistics, Banff, AB, Canada, 21–23 July 1997; pp. 254–258. [Google Scholar]
- Gurugopinath, S.; Muralishankar, R. Geometric power detector for spectrum sensing under symmetric alpha stable noise. Electron. Lett. 2018, 54, 1284–1286. [Google Scholar] [CrossRef]
- Chandra, S.S.; Upadhye, A.; Saravanan, P.; Gurugopinath, S.; Muralishankar, R. Deep Neural Network Architectures for Spectrum Sensing Using Signal Processing Features. In Proceedings of the 2021 IEEE International Conference on Distributed Computing, VLSI, Electrical Circuits and Robotics (DISCOVER), Shivamogga, India, 19–20 November 2021; pp. 129–134. [Google Scholar]
- Gurugopinath, S.; Muralishankar, R.; Shankar, H.N. Robust spectrum sensing based on spectral flatness measure. Electron. Lett. 2017, 53, 890–892. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SVM | AuC |
|---|---|
| GP | 1 |
| ES | 0.9225 |
| DE | 1 |
| KNN | AuC |
|---|---|
| GP | 1 |
| ES | 0.9338 |
| DE | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Q.; Luo, Z.; Xiao, W. Supervised Learning Spectrum Sensing Method via Geometric Power Feature. Electronics 2023, 12, 1616. https://doi.org/10.3390/electronics12071616
Hu Q, Luo Z, Xiao W. Supervised Learning Spectrum Sensing Method via Geometric Power Feature. Electronics. 2023; 12(7):1616. https://doi.org/10.3390/electronics12071616
Chicago/Turabian StyleHu, Qian, Zhongqiang Luo, and Wenshi Xiao. 2023. "Supervised Learning Spectrum Sensing Method via Geometric Power Feature" Electronics 12, no. 7: 1616. https://doi.org/10.3390/electronics12071616
APA StyleHu, Q., Luo, Z., & Xiao, W. (2023). Supervised Learning Spectrum Sensing Method via Geometric Power Feature. Electronics, 12(7), 1616. https://doi.org/10.3390/electronics12071616