
Semantic Knowledge-Based Hierarchical Planning Approach for Multi-Robot Systems




Abstract
:1. Introduction
2. Related Work
3. Methods
3.1. Semantic Knowledge-Based Multi-Robot System Modeling
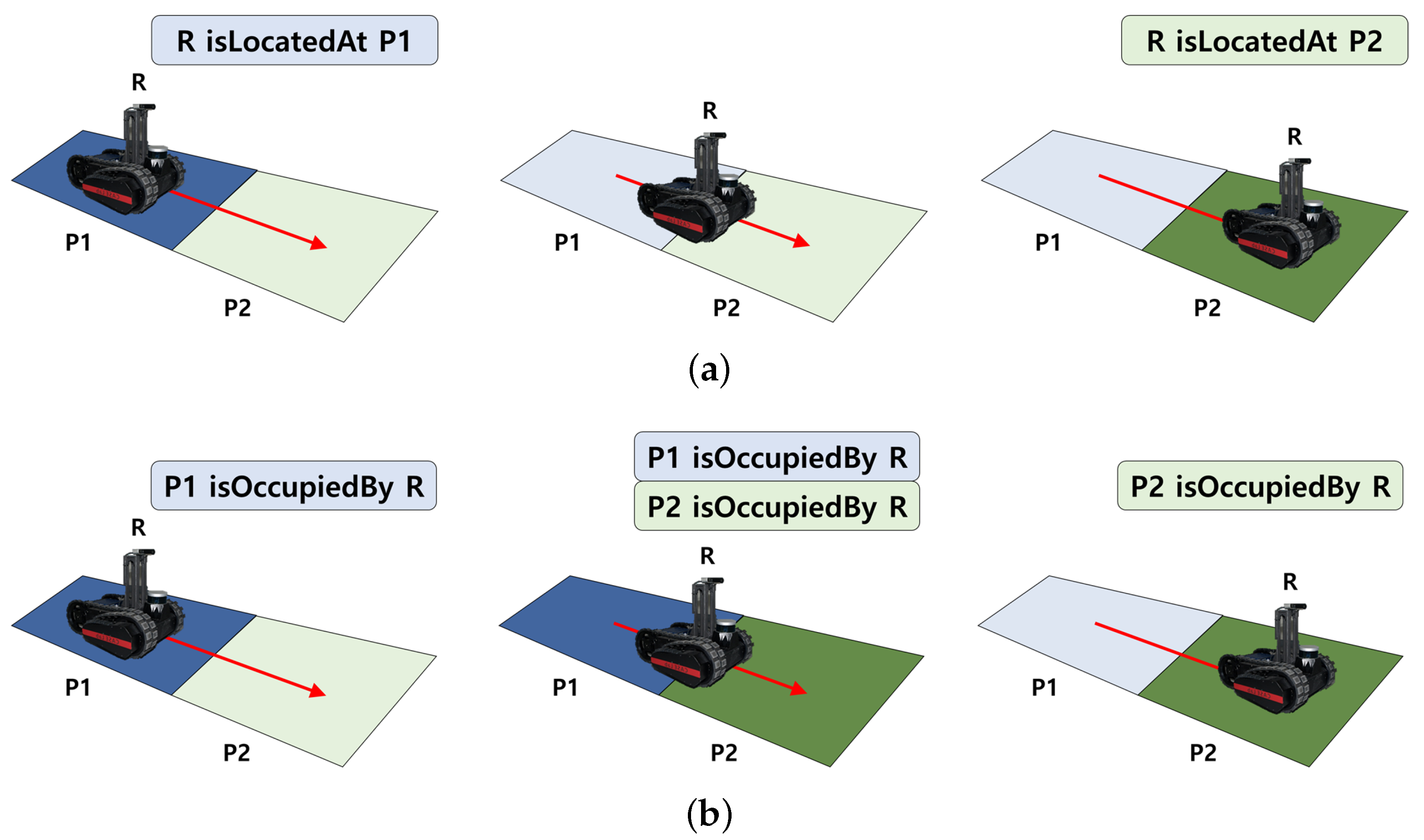
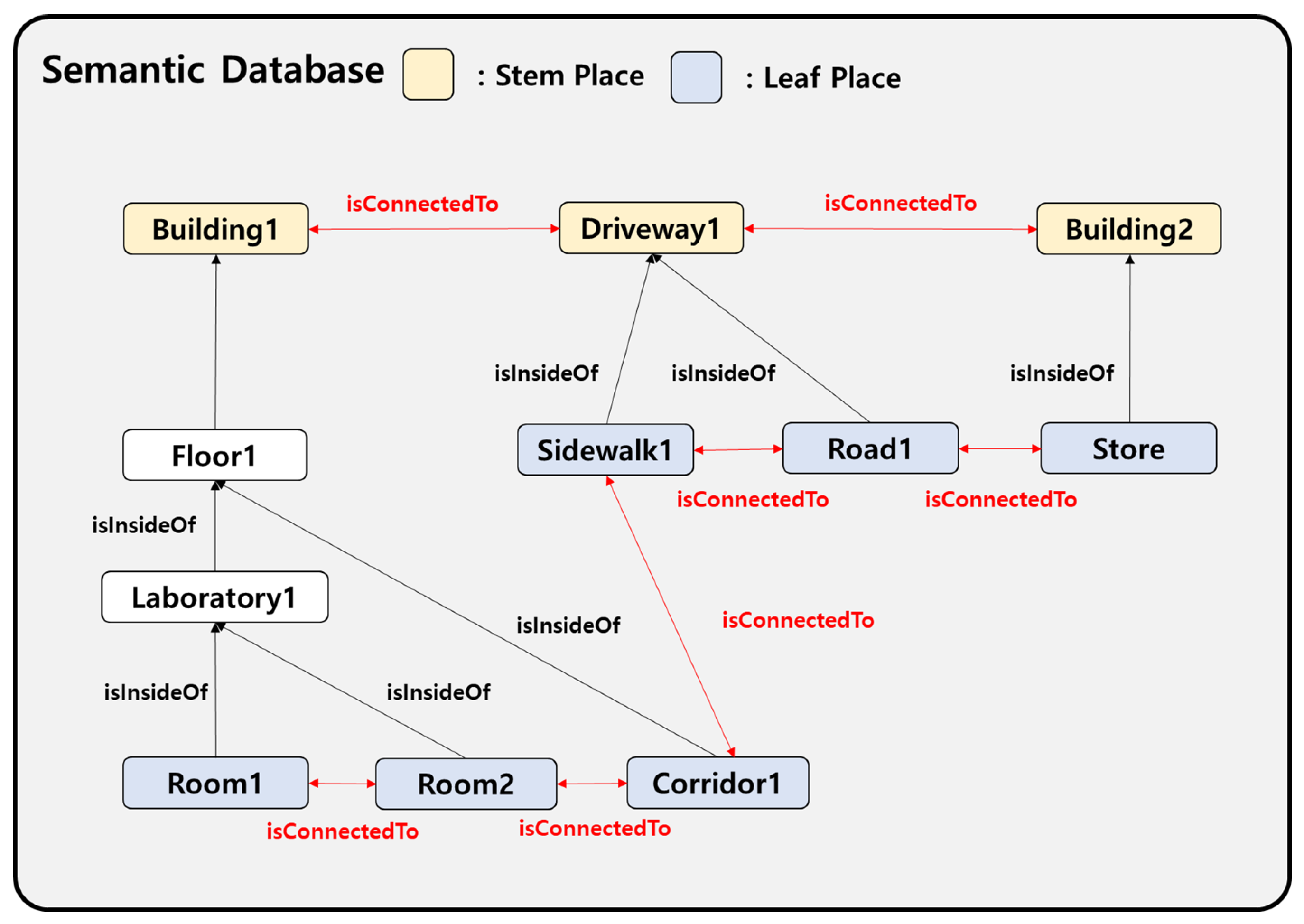
3.1.1. Semantic Knowledge Modeling
- Place(?p1) ∧ Place(?p2) ∧ isInsideOf(?p1, ?p2). sqwrl:makeSet(?s1, ?p1) ∧ sqwrl:makeSet(?s2, ?p2). sqwrl:difference(?s3, ?s2, ?s1) ∧ sqwrl:element(?p, ?s3) ⟶ sqwrl:select(?p).
3.1.2. Semantic Knowledge-Based Task Modeling
| Listing 1. Defined mission-level action Delivery in the domain. |
| (:action delivery :parameters (?r - robot ?o - object ?p - place) :precondition (and (is_used_by ?o ?r) (is_located_at ?r ?to)) :effect (and (delivery_complete ?o ?p))) |
| Listing 2. Defined coarse-level action Move in the domain. |
| (:durative-action move :parameters (?r - robot ?from ?to - place) :duration ( = ?duration (/ (distance ?from ?to)(speed ?r))) :condition (and (over all (is_connected_to ?from ?to)) (over all (can_go_through ?r ?to)) (over all (is_stem_place ?from)) (over all (is_stem_place ?to)) (at start (is_located_at ?r ?from)) (at start (forall (?r2 - robot) (imply (is_different ?r ?r2)(is_not_occupied_by ?to ?r2))))) :effect (and (at start (not (is_located_at ?r ?from))) (at end (is_located_at ?r ?to)) (at start (is_occupied_by ?to ?r)) (at start (not (is_not_occupied_by ?to ?r))) (at end (not (is_occupied_by ?from ?r))))) |
| Listing 3. Defined coarse-level action MoveSame in the domain. |
| (:durative-action move_same :parameters (?r - robot ?from ?to - place) :duration ( = ?duration (/ (distance ?from ?to)(speed ?r))) :condition (and (over all (is_connected_to ?from ?to)) (over all (can_go_through ?r ?to)) (over all (is_stem_place ?from)) (over all (is_stem_place ?to)) (at start (is_located_at ?r ?from))) :effect (and (at start (not (is_located_at ?r ?from))) (at end (is_located_at ?r ?to)) (at start (is_occupied_by ?to ?r)) (at start (not (is_not_occupied_by ?to ?r))) (at end (not (is_occupied_by ?from ?r))) (at end (is_not_occupied_by ?from ?r)) (at start (is_occupied_by ?to ?r)))) |
| Listing 4. Defined coarse-level action Take in the domain. |
| (:action take :parameters (?r - robot ?o - object ?p - place) :duration (= ?duration (take-time ?r)) :condition (and (over all (is_stem_place ?p)) (over all (is_located_at ?r ?p)) (at start (is_inside_of ?o ?p)) (over all (can_use ?r ?o))) :effect (and (at end (not (is_inside_of ?o ?p))) (at end (is_used_by ?o ?r)))) |
| Listing 5. Defined coarse-level action Give in the domain. |
| (:action give :parameters (?r - robot ?o - object ?p - place) :duration (= ?duration (give-time ?r)) :condition (and (over all (is_stem_place ?p)) (over all (is_located_at ?r ?p)) (at start (is_used_by ?o ?r))) :effect (and (at end (not (is_used_by ?o ?r))) (at end (is_inside_of ?o ?p)))) |
| Listing 6. Defined fine-level action GoToPlace in the domain. |
| (:durative-action goto_place :parameters (?r - robot ?from ?to - place) :duration ( = ?duration (/ (distance ?from ?to)(speed ?r))) :condition (and (over all (is_connected_to ?from ?to)) (over all (can_go_through ?r ?to)) (over all (is_leafplace ?from)) (over all (is_leafplace ?to)) (at start (is_located_at ?r ?from)) (at start (forall (?r2 - robot) (imply (is_different ?r ?r2)(is_not_occupied_by ?to ?r2))))) :effect (and (at start (not (is_located_at ?r ?from))) (at end (is_located_at ?r ?to)) (at start (is_occupied_by ?to ?r)) (at start (not (is_not_occupied_by ?to ?r))) (at end (not (is_occupied_by ?from ?r))) (at end (is_not_occupied_by ?from ?r)))) |
| Listing 7. Defined fine-level action PickUp in the domain. |
| (:durative-action pick_up :parameters (?r - robot ?o - object ?p - place) :duration (= ?duration (pickup-time ?r)) :condition (and (over all (is_leafplace ?p)) (at start (is_located_at ?r ?p)) (at start (is_inside_of ?o ?p)) (over all (can_use ?r ?o)) (at start (forall (?r2 - robot) (imply (is_different ?r ?r2)(is_not_used_by ?o ?r2))))) :effect (and (at start (not (is_inside_of ?o ?p))) (at start (is_used_by ?o ?r)) (at start (not (is_not_used_by ?o ?r))))) |
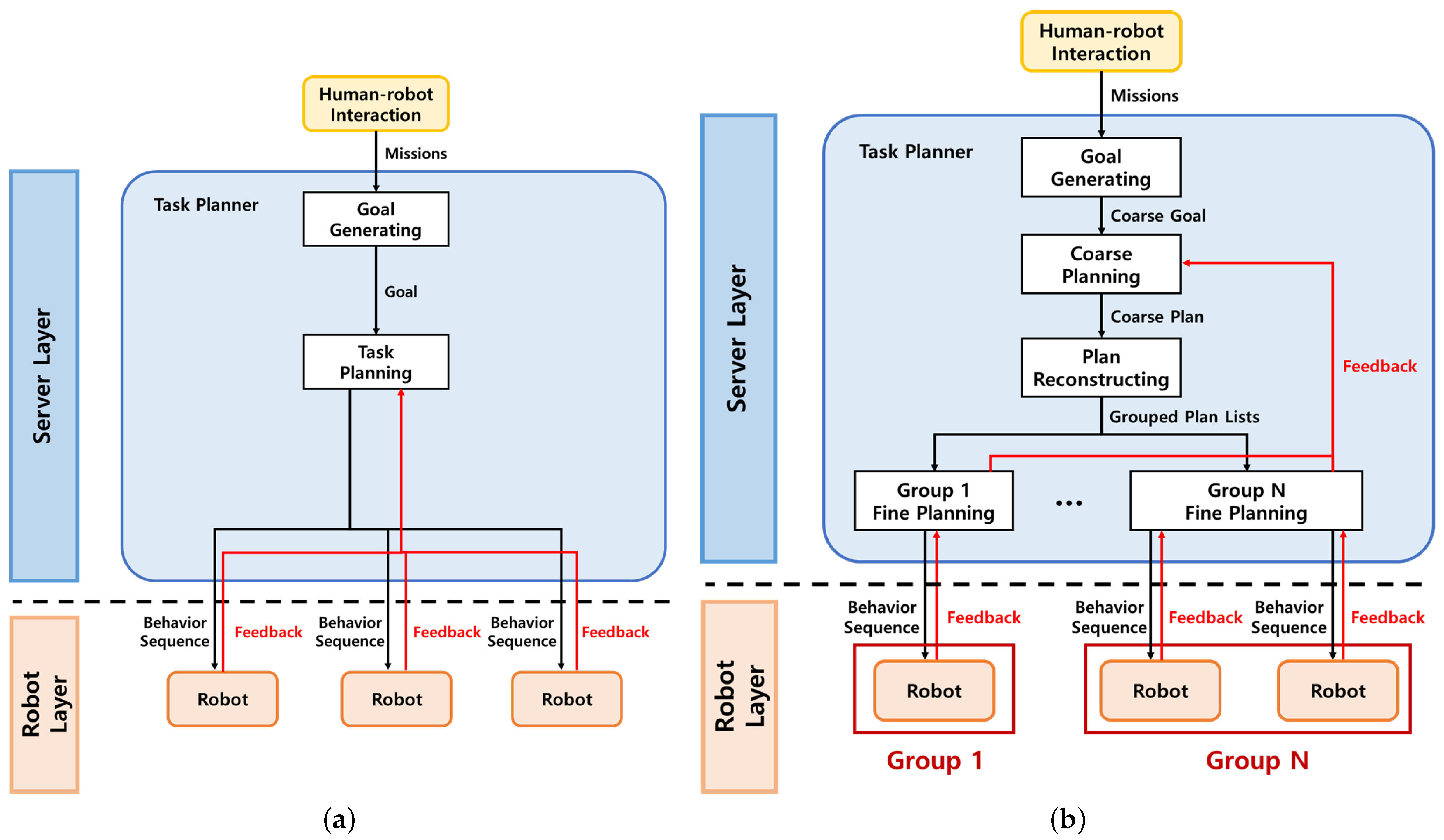
3.2. Semantic Knowledge-Based Task Planner for Multi-Robots
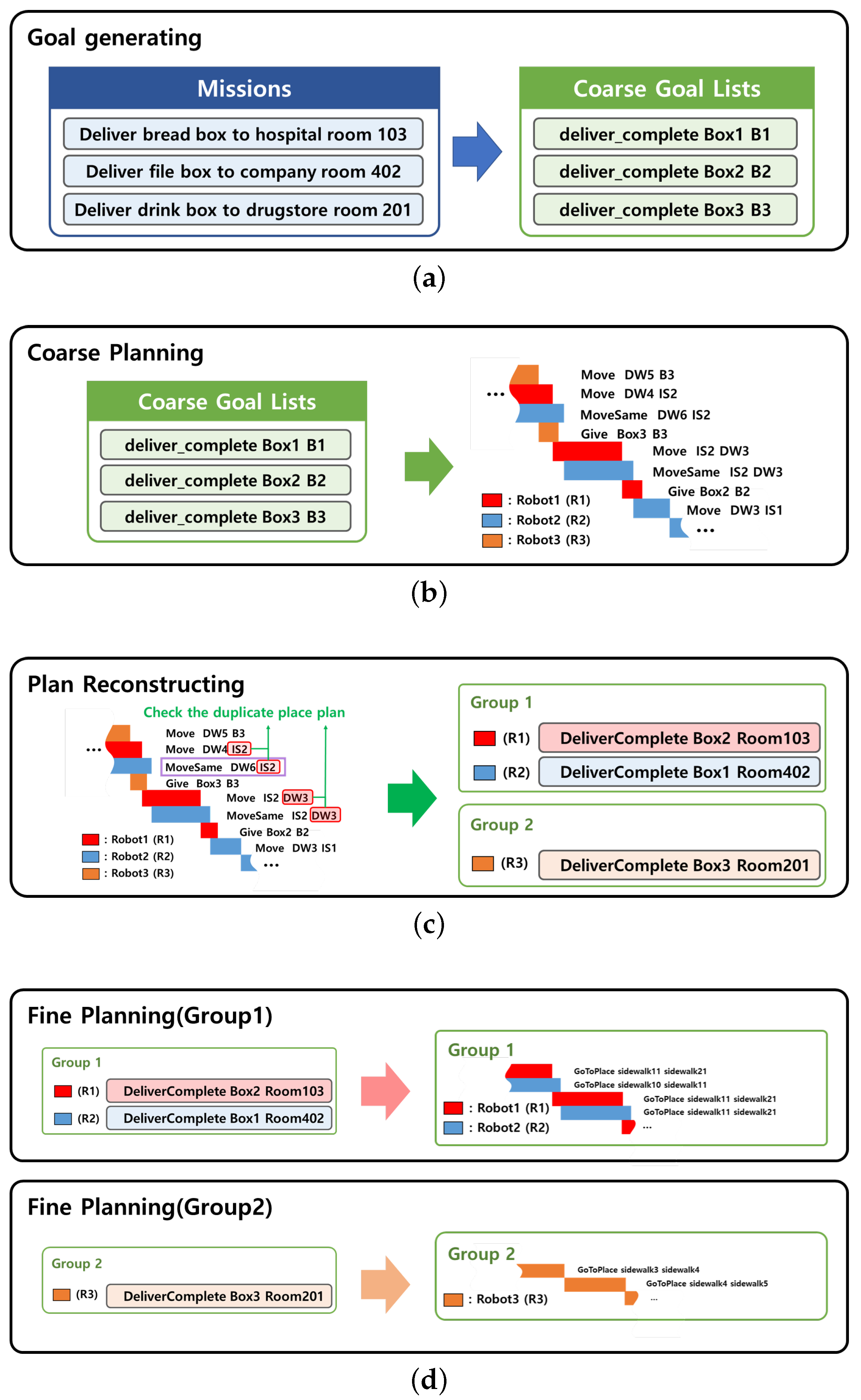
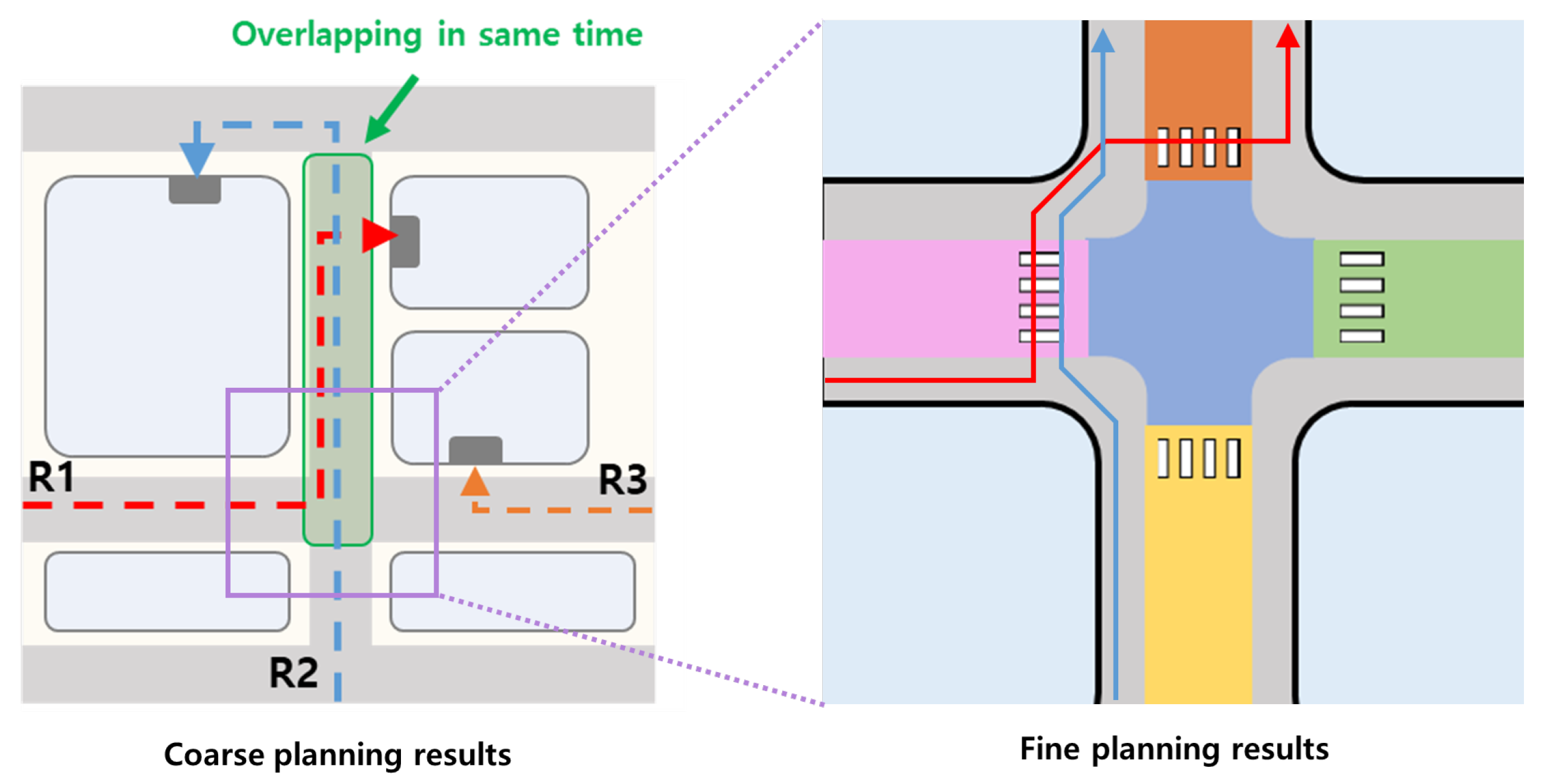
3.2.1. Hierarchical Task Planning Approach for Multi-Robots
- Place(?p1) ∧ name(?p1, “Target Place”) ∧ isInsideOf(?p1, ?p2) ∧ isStemPlace(?p2, true) ⟶ sqwrl:select(?p2).
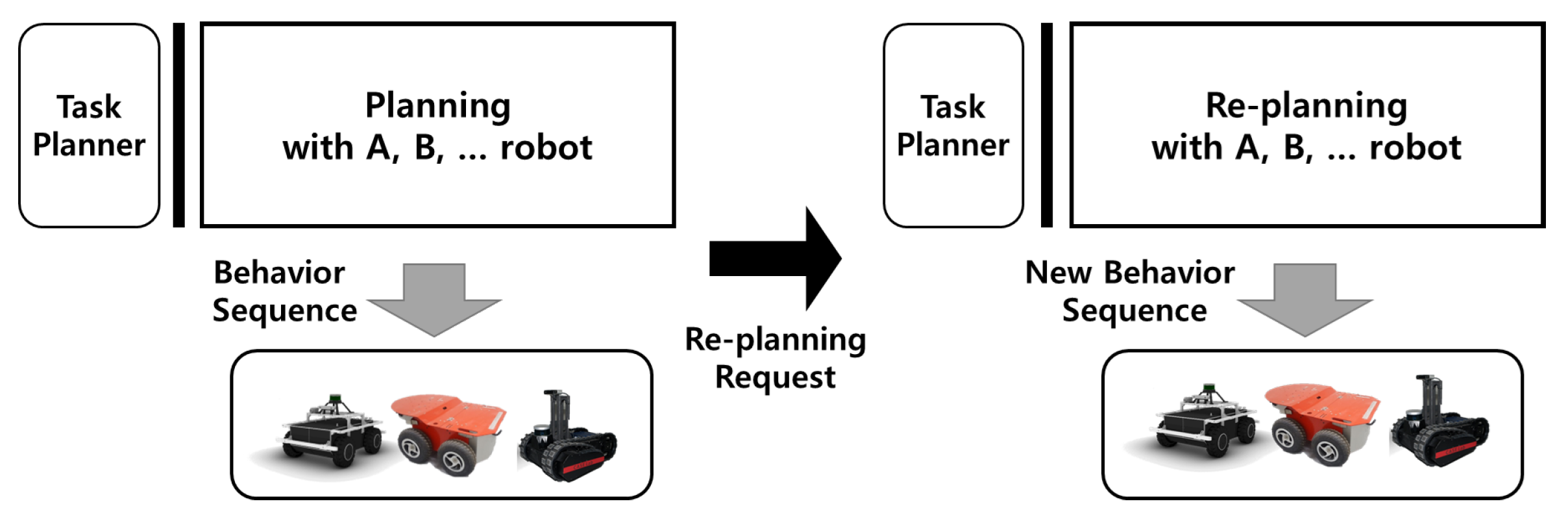
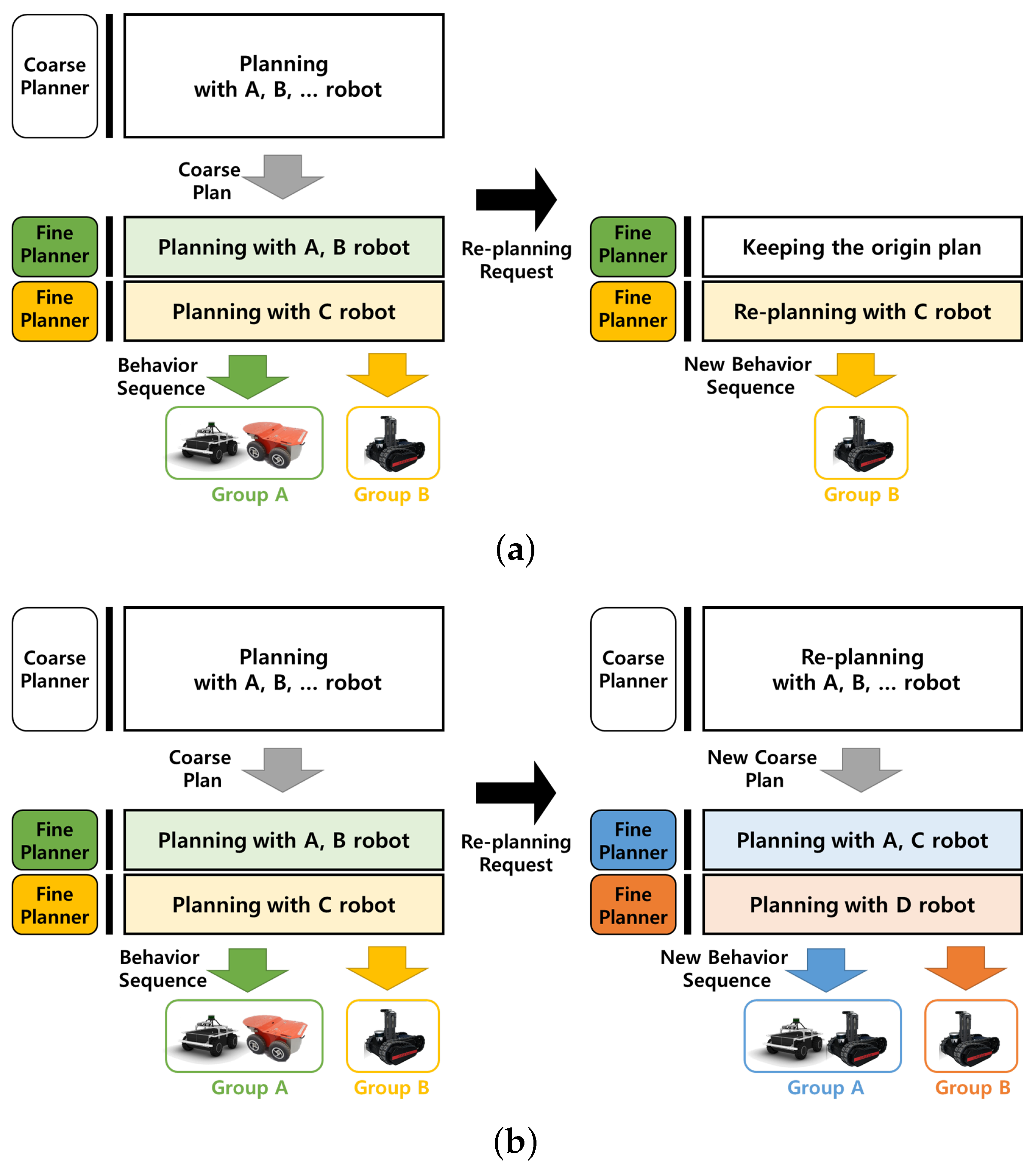
3.2.2. Hierarchical Task Re-Planning Approach for Multi-Robots
4. Results
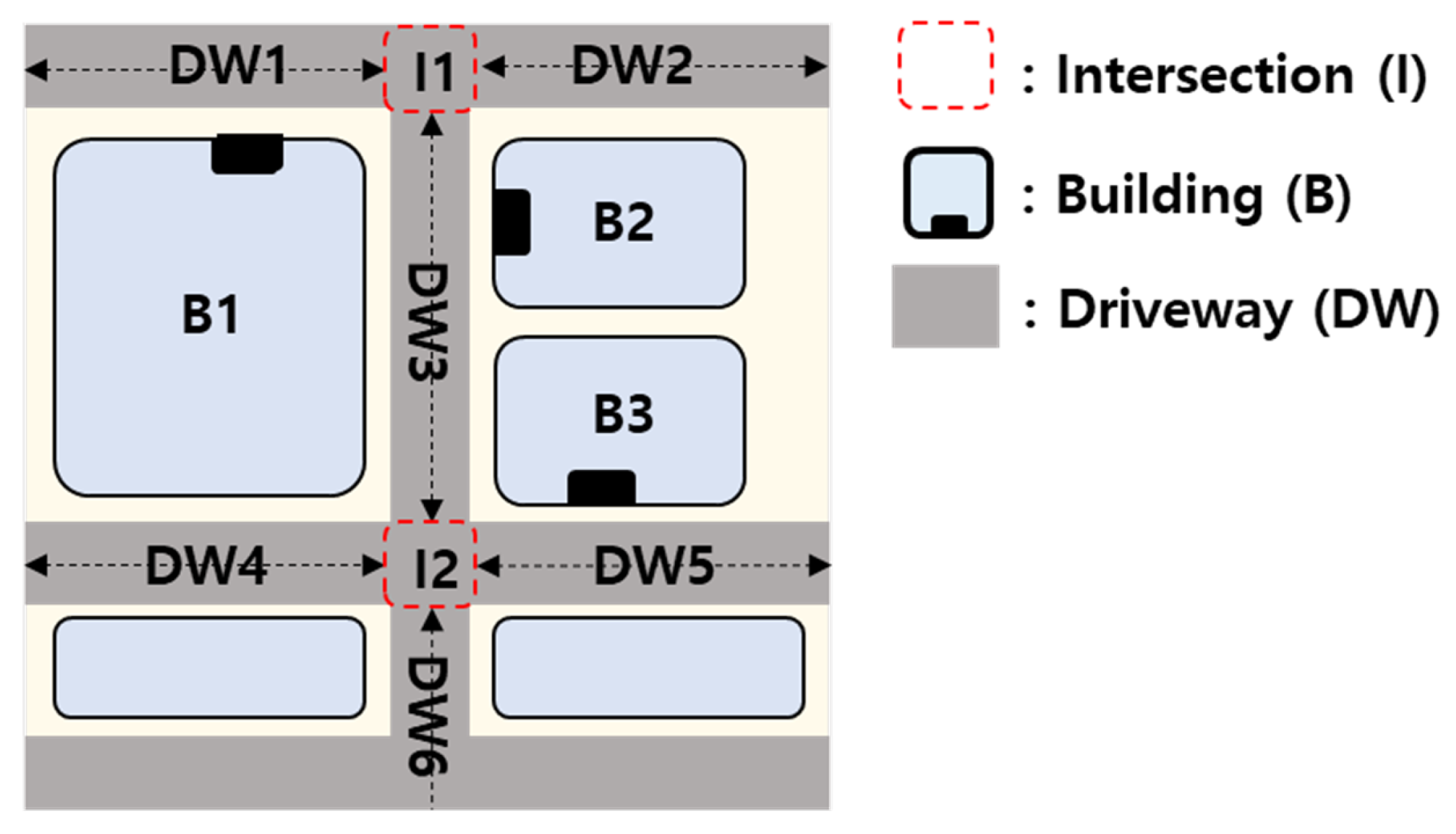
4.1. Experimental Environment
4.2. Experimental Scenario
4.2.1. Semantic Knowledge-Based Multi-Robot Planning
4.2.2. Semantic Knowledge-Based Multi-Robot Task Planning
4.2.3. Semantic Knowledge-Based Multi-Robot Task Re-Planning
4.3. Experimental Results
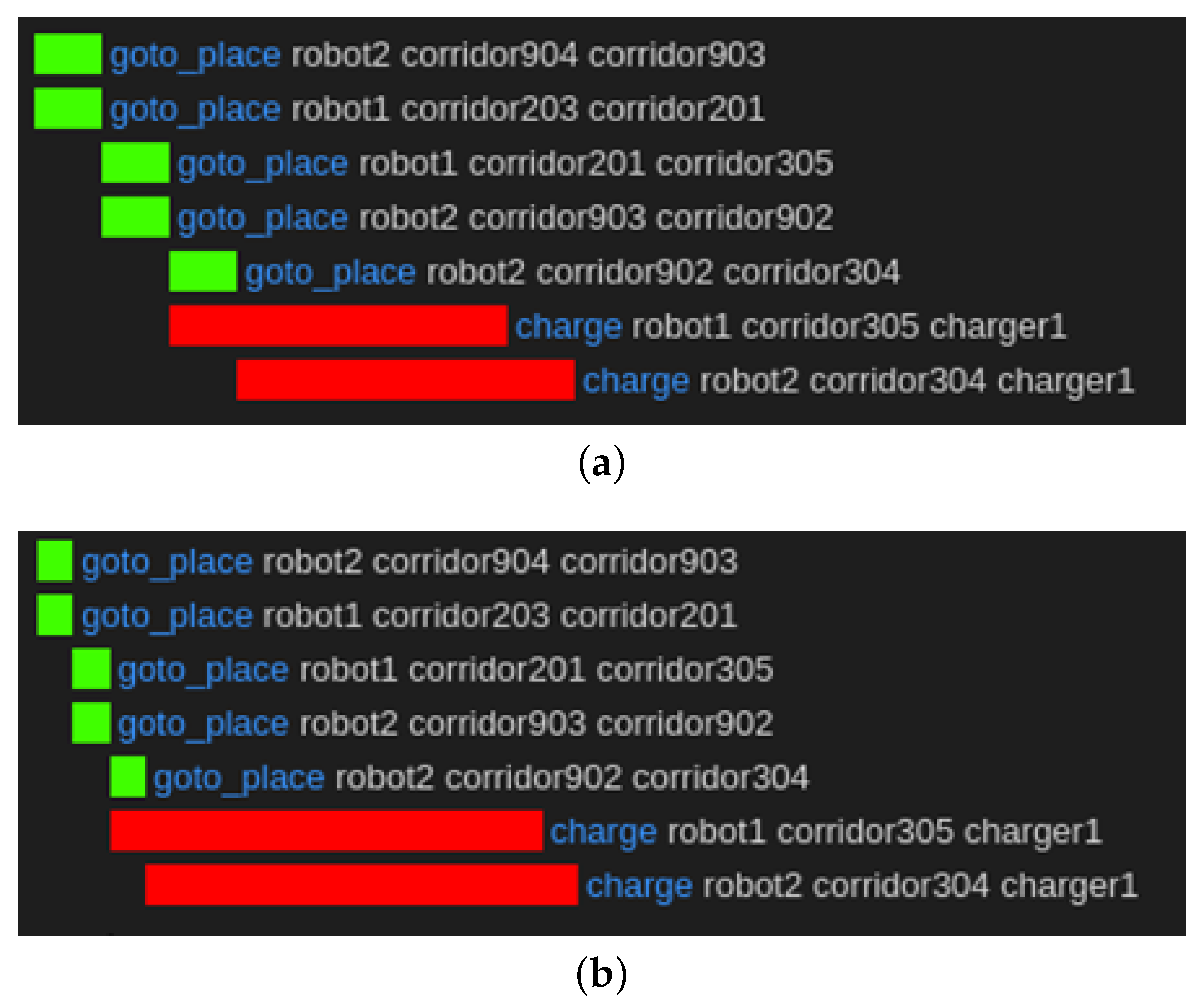
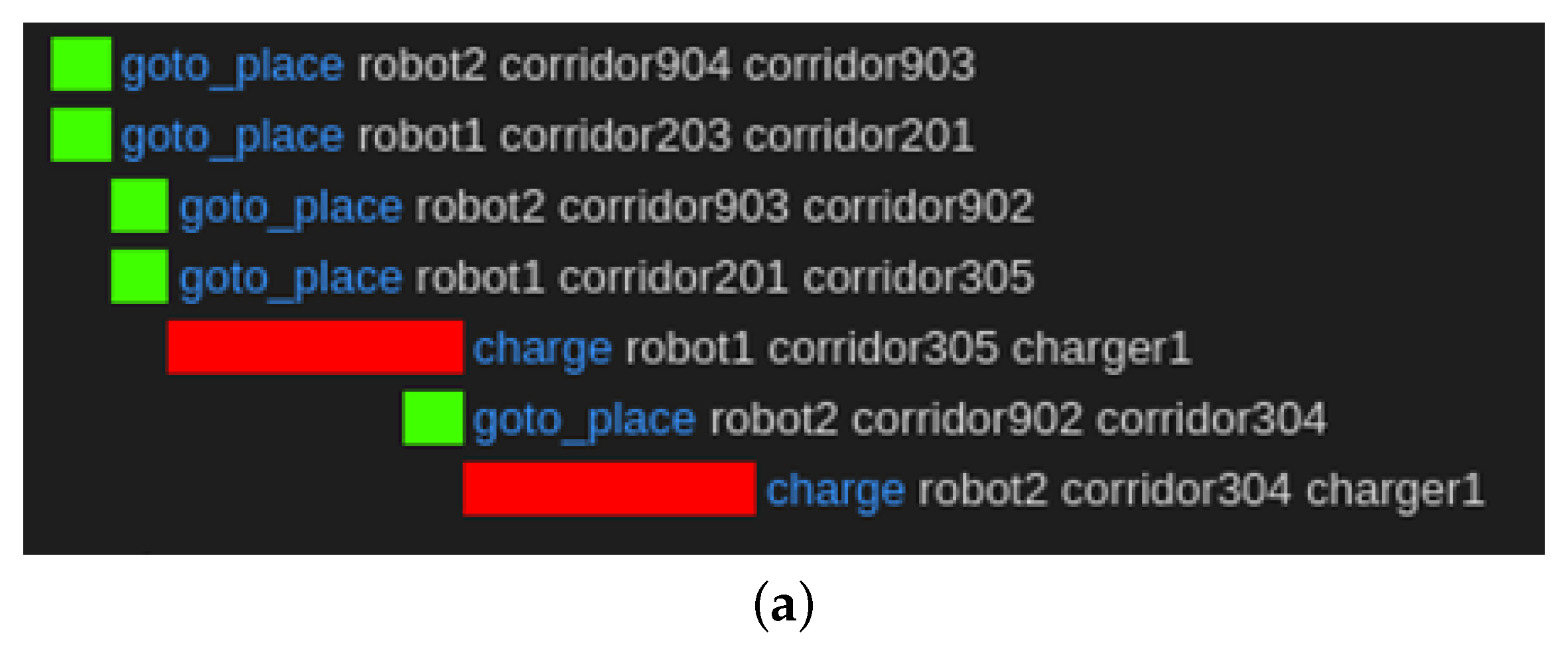
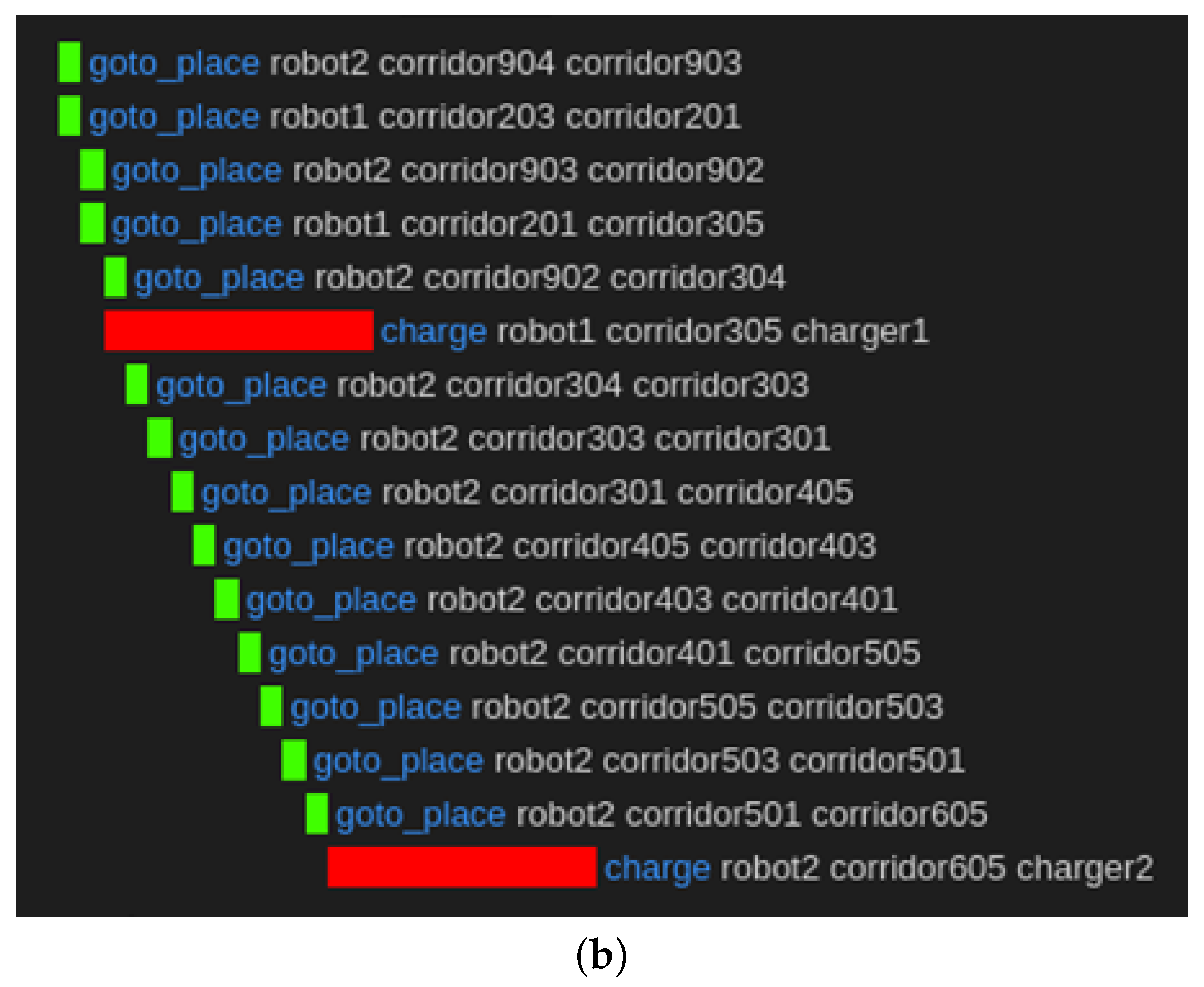
4.3.1. Semantic Knowledge-Based Multi-Robot Planning
4.3.2. Semantic Knowledge-Based Multi-Robot Task Planning
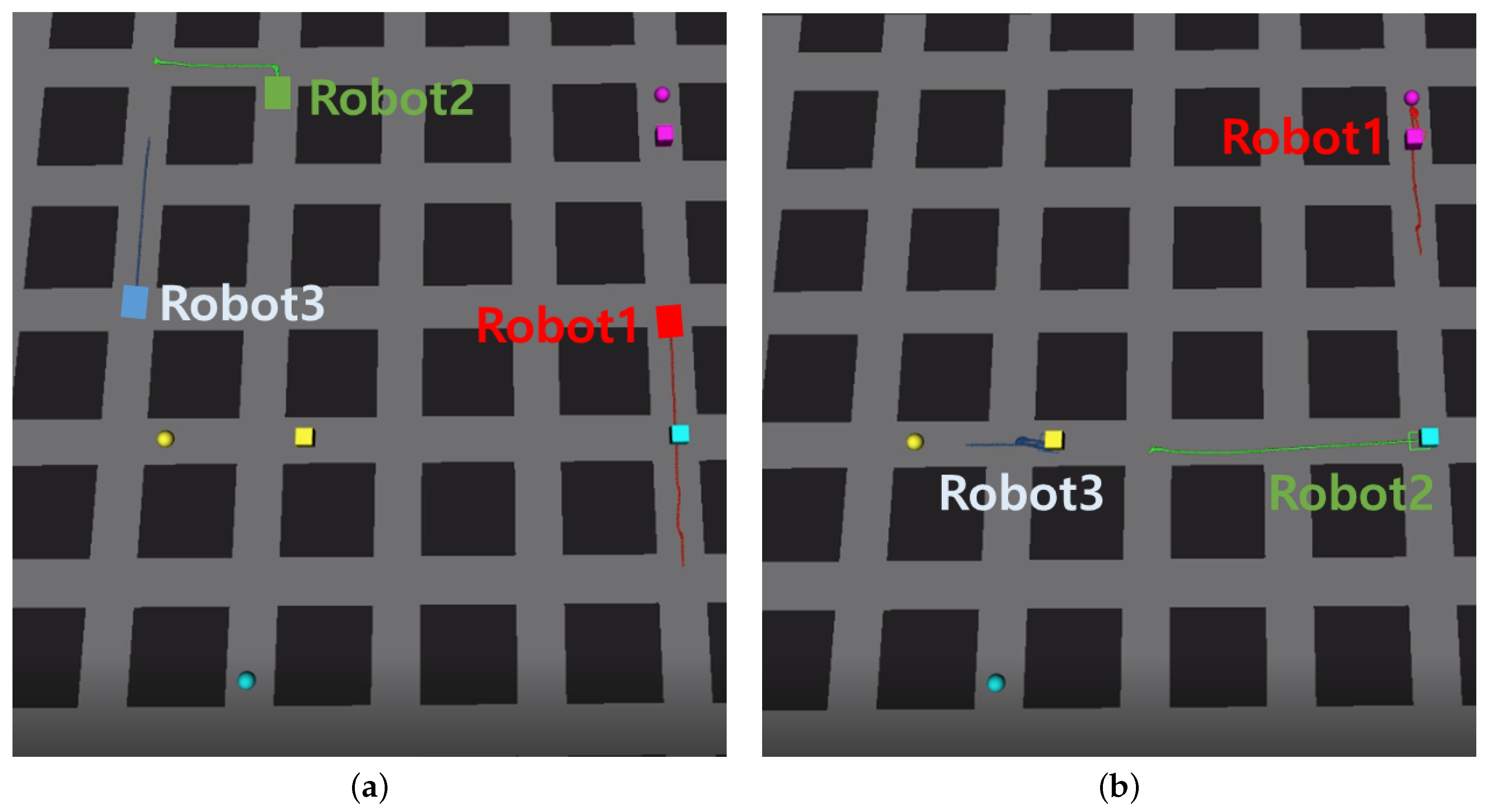
4.3.3. Semantic Knowledge-Based Multi-Robot Task Re-Planning
| Listing 8. Re-planning result with the previous method. |
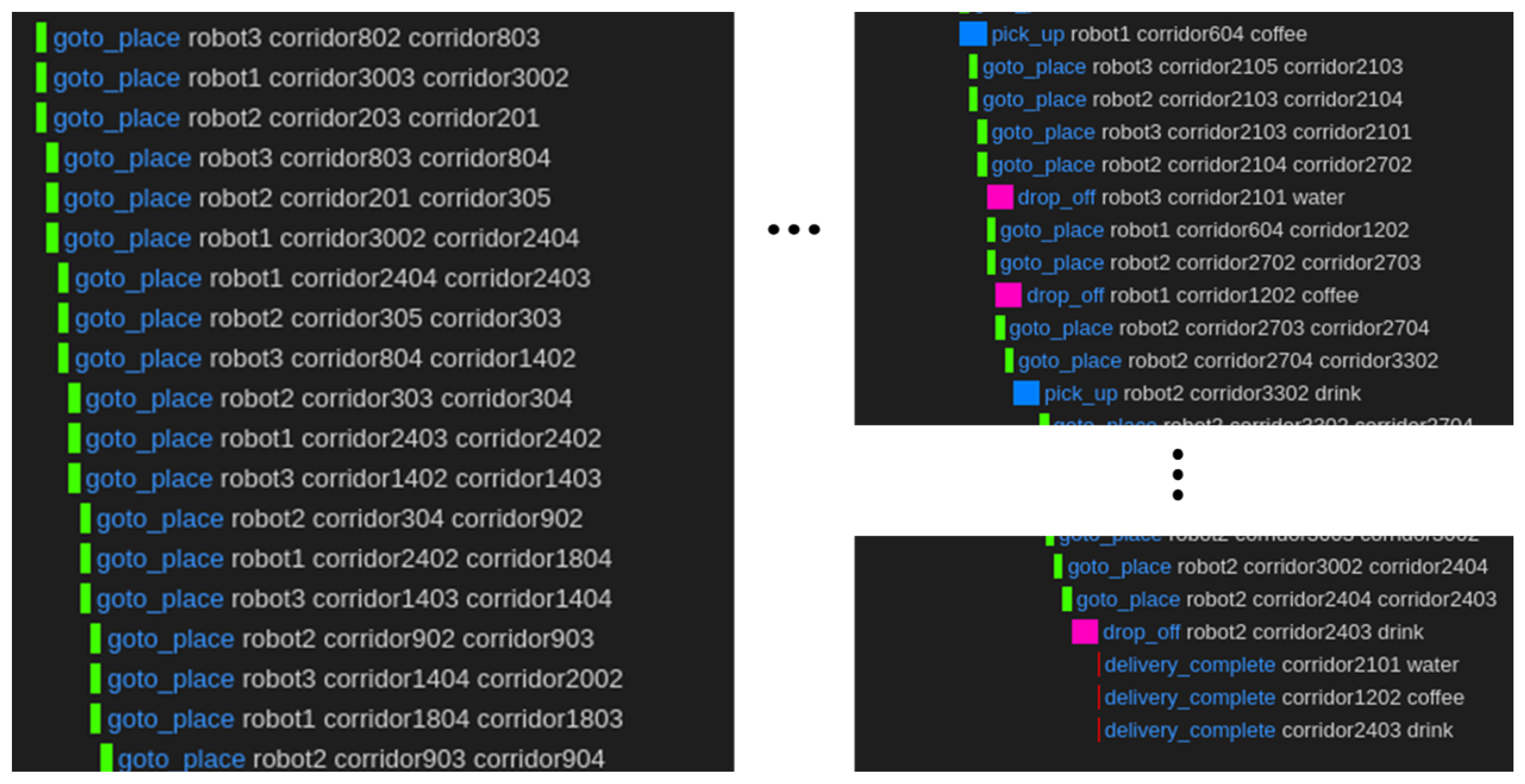
| 0.000: (goto_place robot2 corridor902 corridor903) [3.340] 0.000: (goto_place robot3 corridor1404 corridor2002) [3.340] 0.000: (goto_place robot1 corridor1802 corridor1803) [3.340] 3.341: (goto_place robot2 corridor903 corridor904) [3.340] 3.341: (goto_place robot3 corridor2002 corridor2003) [3.340] 3.341: (goto_place robot1 corridor1803 corridor1805) [3.340] 6.682: (goto_place robot3 corridor2003 corridor2001) [3.340] 6.682: (goto_place robot1 corridor1805 corridor1701) [3.340] 6.682: (goto_place robot2 corridor904 corridor1502) [3.340] 10.023: (pick_up robot3 corridor2001 water) [10.000] … 30.045: (drop_off robot3 corridor2101 water) [10.000] 30.069: (goto_place robot1 corridor1205 corridor1203) [3.340] 30.069: (goto_place robot2 corridor2702 corridor2703) [3.340] 33.410: (goto_place robot2 corridor2703 corridor2704) [3.340] 33.410: (goto_place robot1 corridor1203 corridor1202) [3.340] 36.751: (goto_place robot1 corridor1202 corridor604) [3.340] 36.751: (goto_place robot2 corridor2704 corridor3302) [3.340] 40.092: (pick_up robot1 corridor604 coffee) [10.000] 40.092: (pick_up robot2 corridor3302 drink) [10.000] 50.092: (goto_place robot1 corridor604 corridor1202) [3.340] 50.092: (goto_place robot2 corridor3302 corridor2704) [3.340] 53.432: (drop_off robot1 corridor1202 coffee) [10.000] … 93.525: (goto_place robot2 corridor2404 corridor2403) [3.340] 96.865: (drop_off robot2 corridor2403 drink) [10.000] 106.866: (delivery_complete corridor2101 water) [0.001] 106.866: (delivery_complete corridor1202 coffee) [0.001] 106.866: (delivery_complete corridor2403 drink) [0.001] |
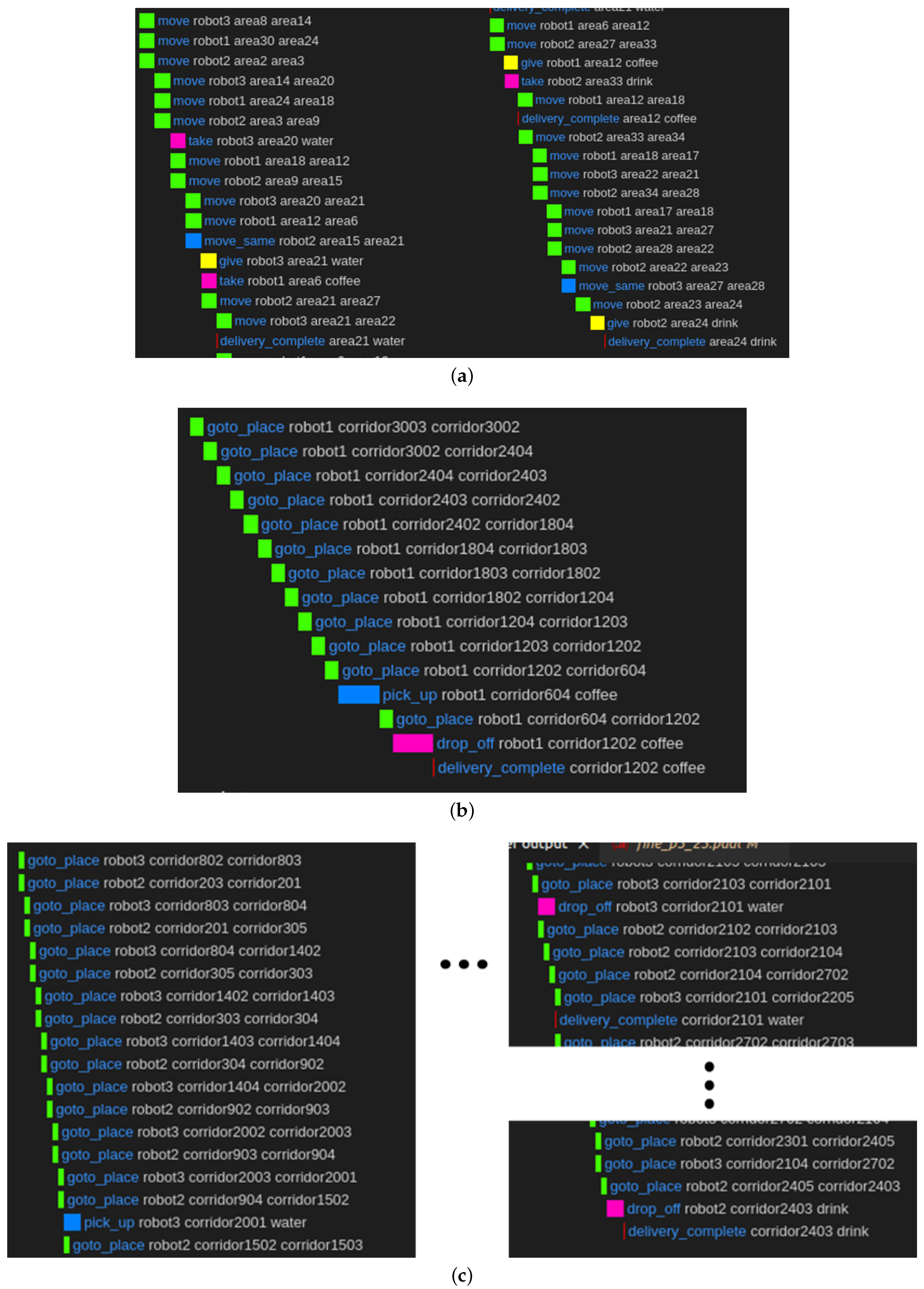
| Listing 9. Re-planning result with the proposed method. |
| 0.000: (goto_place robot1 corridor1802 corridor1803) [3.340] 3.341: (goto_place robot1 corridor1803 corridor1805) [3.340] … 33.410: (goto_place robot1 corridor1203 corridor1202) [3.340] 36.751: (goto_place robot1 corridor1202 corridor604) [3.340] 40.092: (pick_up robot1 corridor604 coffee) [10.000] 50.092: (goto_place robot1 corridor604 corridor1202) [3.340] 53.432: (drop_off robot1 corridor1202 coffee) [10.000] 63.433: (delivery_complete corridor1202 coffee) [0.001] |
5. Conclusions and Implications
5.1. Summary of the Literature
5.2. Theoretical Implications
5.3. Managerial Implications
5.4. Future Research Points
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Crosby, M.; Jonsson, A.; Rovatsos, M. A Single-Agent Approach to Multiagent Planning. In Proceedings of the ECAI, Prague, Czech Republic, 18–22 August 2014; pp. 237–242. [Google Scholar]
- Parker, L.E. ALLIANCE: An architecture for fault tolerant multirobot cooperation. IEEE Trans. Robot. Autom. 1998, 14, 220–240. [Google Scholar] [CrossRef]
- Mathew, N.; Smith, S.L.; Waslander, S.L. Planning paths for package delivery in heterogeneous multirobot teams. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1298–1308. [Google Scholar] [CrossRef]
- Khandelwal, P.; Barrett, S.; Stone, P. Leading the way: An efficient multi-robot guidance system. In Proceedings of the 2015 International Conference on Autonomous Agents and Multiagent Systems, Istanbul, Turkey, 4–8 May 2015; pp. 1625–1633. [Google Scholar]
- Liao, Y.L.; Su, K.L. Multi-robot-based intelligent security system. Artif. Life Robot. 2011, 16, 137–141. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Martín, D.; de la Escalera, A. Trajectory planning for multi-robot systems: Methods and applications. Expert Syst. Appl. 2021, 173, 114660. [Google Scholar] [CrossRef]
- Wang, Q.; Li, J.; Yang, L.; Yang, Z.; Li, P.; Xia, G. Distributed Multi-Mobile Robot Path Planning and Obstacle Avoidance Based on ACO–DWA in Unknown Complex Terrain. Electronics 2022, 11, 2144. [Google Scholar] [CrossRef]
- Sun, D.; Kleiner, A.; Nebel, B. Behavior-based multi-robot collision avoidance. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1668–1673. [Google Scholar]
- Rosinol, A.; Gupta, A.; Abate, M.; Shi, J.; Carlone, L. 3D dynamic scene graphs: Actionable spatial perception with places, objects, and humans. arXiv 2020, arXiv:2002.06289. [Google Scholar]
- Dube, R.; Cramariuc, A.; Dugas, D.; Sommer, H.; Dymczyk, M.; Nieto, J.; Siegwart, R.; Cadena, C. SegMap: Segment-based mapping and localization using data-driven descriptors. Int. J. Robot. Res. 2020, 39, 339–355. [Google Scholar] [CrossRef]
- Chen, X.; Milioto, A.; Palazzolo, E.; Giguere, P.; Behley, J.; Stachniss, C. Suma++: Efficient lidar-based semantic slam. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 4530–4537. [Google Scholar]
- Tate, A. Generating project networks. In Proceedings of the 5th International Joint Conference on Artificial Intelligence, Cambridge, MA, USA, 22–25 August 1977; Volume 2, pp. 888–893. [Google Scholar]
- Georgievski, I.; Aiello, M. An overview of hierarchical task network planning. arXiv 2014, arXiv:1403.7426. [Google Scholar]
- Erol, K.; Hendler, J.A.; Nau, D.S. Semantics for Hierarchical Task-Network Planning; Technical Report; Maryland University College Park Institute for Systems Research: College Park, MD, USA, 1995. [Google Scholar]
- Crespo, J.; Castillo, J.C.; Mozos, O.M.; Barber, R. Semantic information for robot navigation: A survey. Appl. Sci. 2020, 10, 497. [Google Scholar] [CrossRef]
- Manzoor, S.; Rocha, Y.G.; Joo, S.H.; Bae, S.H.; Kim, E.J.; Joo, K.J.; Kuc, T.Y. Ontology-based knowledge representation in robotic systems: A survey oriented toward applications. Appl. Sci. 2021, 11, 4324. [Google Scholar] [CrossRef]
- Joo, S.; Bae, S.; Choi, J.; Park, H.; Lee, S.; You, S.; Uhm, T.; Moon, J.; Kuc, T. A Flexible Semantic Ontological Model Framework and Its Application to Robotic Navigation in Large Dynamic Environments. Electronics 2022, 11, 2420. [Google Scholar] [CrossRef]
- Moon, J.; Lee, B.H. PDDL planning with natural language-based scene understanding for uav-ugv cooperation. Appl. Sci. 2019, 9, 3789. [Google Scholar] [CrossRef]
- Hwang, N.E.; Kim, H.J.; Kim, J.G. Centralized Task Allocation and Alignment Based on Constraint Table and Alignment Rules. Appl. Sci. 2022, 12, 6780. [Google Scholar] [CrossRef]
- Thomas, A.; Mastrogiovanni, F.; Baglietto, M. Towards multi-robot task-motion planning for navigation in belief space. arXiv 2020, arXiv:2010.00780. [Google Scholar]
- Schillinger, P.; Bürger, M.; Dimarogonas, D.V. Simultaneous task allocation and planning for temporal logic goals in heterogeneous multi-robot systems. Int. J. Robot. Res. 2018, 37, 818–838. [Google Scholar] [CrossRef]
- Buehler, J.; Pagnucco, M. A framework for task planning in heterogeneous multi robot systems based on robot capabilities. In Proceedings of the AAAI Conference on Artificial Intelligence, Quebec City, QC, Canada, 27–31 July 2014; Volume 28. [Google Scholar]
- Galindo, C.; Fernández-Madrigal, J.A.; González, J.; Saffiotti, A. Robot task planning using semantic maps. Robot. Auton. Syst. 2008, 56, 955–966. [Google Scholar] [CrossRef]
- Suh, I.H.; Lim, G.H.; Hwang, W.; Suh, H.; Choi, J.H.; Park, Y.T. Ontology-based multi-layered robot knowledge framework (OMRKF) for robot intelligence. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 429–436. [Google Scholar]
- Joo, S.H.; Manzoor, S.; Rocha, Y.G.; Bae, S.H.; Lee, K.H.; Kuc, T.Y.; Kim, M. Autonomous navigation framework for intelligent robots based on a semantic environment modeling. Appl. Sci. 2020, 10, 3219. [Google Scholar] [CrossRef]
- Hanheide, M.; Göbelbecker, M.; Horn, G.S.; Pronobis, A.; Sjöö, K.; Aydemir, A.; Jensfelt, P.; Gretton, C.; Dearden, R.; Janicek, M.; et al. Robot task planning and explanation in open and uncertain worlds. Artif. Intell. 2017, 247, 119–150. [Google Scholar] [CrossRef]
- Fox, M.; Long, D. PDDL2. 1: An extension to PDDL for expressing temporal planning domains. J. Artif. Intell. Res. 2003, 20, 61–124. [Google Scholar] [CrossRef]
- Coles, A.; Coles, A.; Fox, M.; Long, D. Forward-chaining partial-order planning. In Proceedings of the International Conference on Automated Planning and Scheduling, Toronto, ON, Canada, 12–16 May 2010; Volume 20, pp. 42–49. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | System | Task Planner | Semantic Constraint Modeling | |||
|---|---|---|---|---|---|---|
| Planning Method | Hierarchical Structure | Re-Planning | Property and Relationship | Duplication | ||
| Hwang et al. [19] | Multi | CCBBA | O | X | - | - |
| Thomas et al. [20] | Multi | POPF | O | X | - | - |
| Schillinger et al. [21] | Multi | LTL | O | X | - | - |
| Buehler et al. [22] | Multi | TFD | X | X | √ | - |
| Galindo et al. [23] | Single | Metric-FF | X | X | - | - |
| OMRKF [24] | Single | ABPLAN | O | X | √ | - |
| Joo et al. [25] | Single | POPF | O | X | - | - |
| Hanheide et al. [26] | Multi | POMDP | X | X | √ | - |
| Moon et al. [18] | Multi | POPF | X | X | √ | - |
| TOSMNav [17] | Multi | POPF | O | O | √ | - |
| Our | Multi | POPF | O | O | √ | √ |
| Object Property Hierarchy | Domains | Ranges |
|---|---|---|
| isOccupiedBy | Place | Robot |
| isNotOccupiedBy | Place | Robot |
| isUsedBy | Object | Robot |
| isNotUsedBy | Object | Robot |
| canUse | Robot | Object |
| isDifferent | Robot | Robot |
| Task Level Hierarchy | List of Tasks | |||
|---|---|---|---|---|
| Mission level | Delivery | Guidance | Surveillance | Patrol |
| Coarse level | Move | MoveSame | Take | Give |
| Fine level | GoToPlace | Charge | PickUp | Dropoff |
| Located Corridor ID | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Robot | Object | Target Place | |||||||||
| 1 | 2 | 3 | 4 | 1 | 2 | 3 | 1 | 2 | 3 | ||
| Case 1 | 1 | 3405 | 2004 | - | - | 2802 | 2004 | 3005 | 403 | 3502 | 1201 |
| 2 | 804 | 1902 | - | - | 1104 | 2805 | 3303 | 2002 | 3504 | 1105 | |
| 3 | 1003 | 805 | - | - | 1204 | 305 | 2401 | 603 | 1901 | 1702 | |
| 4 | 2504 | 401 | - | - | 2804 | 103 | 3302 | 3001 | 601 | 803 | |
| 5 | 2802 | 2303 | - | - | 3104 | 2301 | 1803 | 2403 | 1802 | 3302 | |
| 6 | 3203 | 3604 | - | - | 105 | 805 | 3101 | 1801 | 2601 | 1302 | |
| 7 | 3005 | 3602 | - | - | 2902 | 2304 | 102 | 1002 | 3102 | 1104 | |
| 8 | 2404 | 1405 | - | - | 3201 | 602 | 802 | 303 | 3505 | 103 | |
| Case 2 | 1 | 3003 | 203 | 802 | - | 2001 | 3302 | 604 | 2101 | 2403 | 1202 |
| 2 | 3501 | 303 | 2103 | - | 2701 | 3601 | 104 | 3105 | 703 | 605 | |
| 3 | 904 | 605 | 1703 | - | 1804 | 503 | 2902 | 904 | 802 | 2602 | |
| 4 | 1905 | 803 | 1702 | - | 1202 | 2205 | 2101 | 1002 | 3002 | 1102 | |
| 5 | 2205 | 3603 | 604 | - | 2301 | 1005 | 2201 | 2602 | 602 | 705 | |
| 6 | 2305 | 1804 | 3401 | - | 1502 | 1103 | 2203 | 1705 | 101 | 1904 | |
| 7 | 1904 | 2304 | 3203 | - | 3403 | 405 | 3102 | 2105 | 901 | 1104 | |
| 8 | 502 | 805 | 3105 | - | 2401 | 2101 | 603 | 2901 | 1002 | 1704 | |
| Case 3 | 1 | 3205 | 1504 | 1005 | 2404 | 1201 | 1505 | 2801 | 801 | 2902 | 2402 |
| 2 | 3203 | 2004 | 305 | 202 | 3303 | 301 | 2601 | 502 | 2103 | 204 | |
| 3 | 2201 | 1501 | 1305 | 2101 | 3601 | 802 | 903 | 2802 | 1602 | 2403 | |
| 4 | 2702 | 202 | 102 | 302 | 3404 | 1604 | 703 | 2201 | 3204 | 3601 | |
| 5 | 504 | 2903 | 2005 | 3105 | 2204 | 1104 | 1405 | 3105 | 604 | 2205 | |
| 6 | 3201 | 1105 | 605 | 1303 | 1102 | 1205 | 2304 | 2502 | 904 | 1403 | |
| 7 | 2902 | 804 | 701 | 3403 | 1105 | 2402 | 1004 | 1604 | 804 | 2101 | |
| 8 | 1702 | 2703 | 305 | 701 | 3501 | 2305 | 3002 | 405 | 1202 | 2704 | |
| Quantity of Used Place Instance | Planning Time | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Proposed Method | Previous Method | Proposed Method | Previous Method | ||||||
| Coarse | Fine | Total | Coarse | Fine | Total | ||||
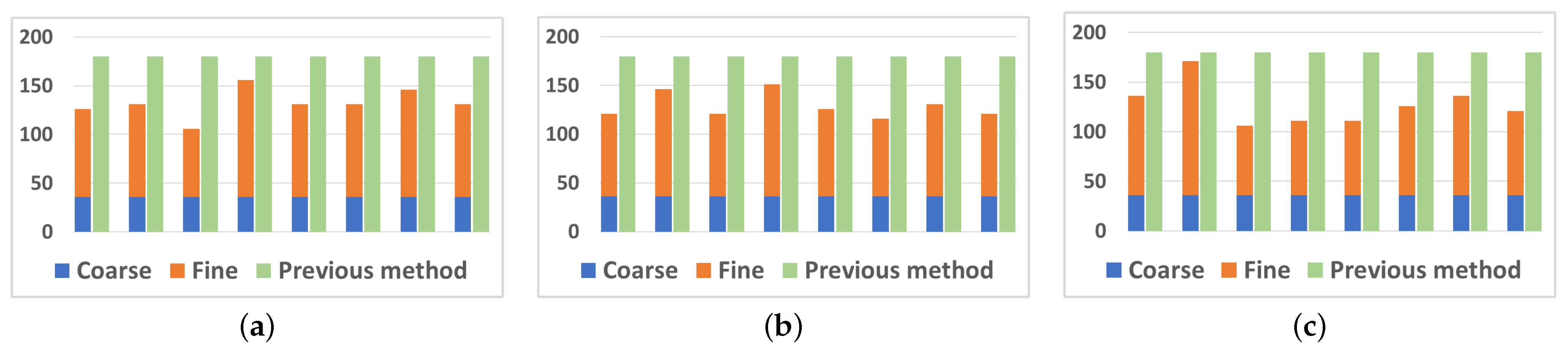
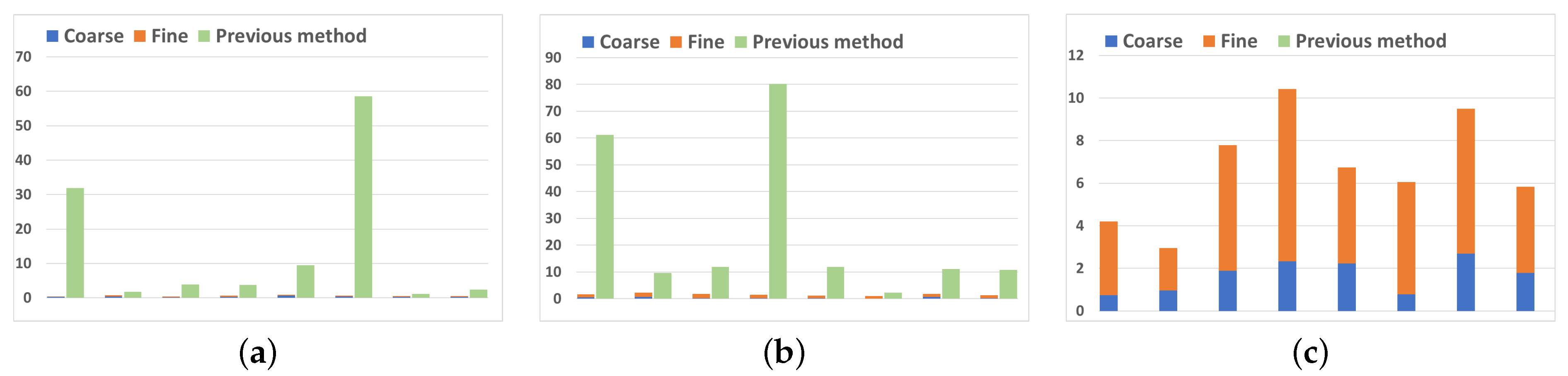
| Case 1 | 1 | 36 | 90 | 126 | 180 | 0.22 | 0.23 | 0.45 | 31.88 |
| 2 | 36 | 95 | 131 | 180 | 0.34 | 0.48 | 0.82 | 1.8 | |
| 3 | 36 | 70 | 106 | 180 | 0.09 | 0.32 | 0.41 | 3.89 | |
| 4 | 36 | 120 | 156 | 180 | 0.33 | 0.36 | 0.69 | 3.7 | |
| 5 | 36 | 95 | 131 | 180 | 0.65 | 0.28 | 0.93 | 9.51 | |
| 6 | 36 | 95 | 131 | 180 | 0.37 | 0.3 | 0.67 | 58.52 | |
| 7 | 36 | 110 | 146 | 180 | 0.23 | 0.31 | 0.54 | 1.12 | |
| 8 | 36 | 95 | 131 | 180 | 0.24 | 0.27 | 0.51 | 2.42 | |
| Case 2 | 1 | 36 | 100 | 136 | 180 | 0.54 | 1.14 | 1.68 | 61.25 |
| 2 | 36 | 135 | 171 | 180 | 0.74 | 1.51 | 2.25 | 9.71 | |
| 3 | 36 | 70 | 106 | 180 | 0.18 | 1.57 | 1.75 | 11.93 | |
| 4 | 36 | 75 | 111 | 180 | 0.16 | 1.25 | 1.41 | 80.23 | |
| 5 | 36 | 75 | 111 | 180 | 0.14 | 0.98 | 1.12 | 11.89 | |
| 6 | 36 | 90 | 126 | 180 | 0.11 | 0.91 | 1.02 | 2.34 | |
| 7 | 36 | 100 | 136 | 180 | 0.73 | 1.04 | 1.77 | 11.07 | |
| 8 | 36 | 85 | 121 | 180 | 0.24 | 1.12 | 1.36 | 10.7 | |
| Case 3 | 1 | 36 | 85 | 121 | 180 | 0.74 | 3.46 | 4.2 | Time over |
| 2 | 36 | 110 | 146 | 180 | 0.95 | 2.01 | 2.96 | Time over | |
| 3 | 36 | 85 | 121 | 180 | 1.89 | 5.9 | 7.79 | Time over | |
| 4 | 36 | 115 | 151 | 180 | 2.32 | 8.1 | 10.42 | Time over | |
| 5 | 36 | 90 | 126 | 180 | 2.22 | 4.51 | 6.73 | Time over | |
| 6 | 36 | 80 | 116 | 180 | 0.77 | 5.29 | 6.06 | Time over | |
| 7 | 36 | 95 | 131 | 180 | 2.69 | 6.81 | 9.5 | Time over | |
| 8 | 36 | 85 | 121 | 180 | 1.79 | 4.05 | 5.84 | Time over | |
| Trouble Case | Troubled Robot ID | Re-Planned Robot ID | Re-Planning Time | |||||
|---|---|---|---|---|---|---|---|---|
| Proposed Method | Previous Method | Proposed Method | Previous Method | |||||
| Coarse | Fine | Total | ||||||
| Case 1 | Block path | 1 | 1 | 1, 2, 3 | - | 0.31 | 0.31 | 38.93 |
| 2 | 2, 3 | 1, 2, 3 | - | 0.46 | 0.46 | 32.21 | ||
| 3 | 2, 3 | 1, 2, 3 | - | 0.54 | 0.54 | 31.32 | ||
| Robot breakdown | 1 | 2, 3 | 2, 3 | 0.35 | 1.84 | 2.19 | 16.24 | |
| 2 | 1, 3 | 1, 3 | 0.18 | 2.20 | 2.38 | 25.71 | ||
| 3 | 1, 2 | 1, 2 | 0.16 | 1.45 | 1.61 | 18.95 | ||
| Case 2 | Block path | 1 | 1, 2, 3 | 1, 2, 3 | 0.65 | 0.62 | 1.27 | 8.65 |
| 2 | 1, 2, 3 | 1, 2, 3 | 0.57 | 0.65 | 1.22 | 9.48 | ||
| 3 | 1, 2, 3 | 1, 2, 3 | 0.61 | 0.48 | 1.09 | 8.41 | ||
| Robot breakdown | 1 | 2, 3 | 2, 3 | 0.34 | 0.22 | 0.56 | 3.71 | |
| 2 | 1, 3 | 1, 3 | 0.25 | 0.37 | 0.62 | 2.80 | ||
| 3 | 1, 2 | 1, 2 | 0.47 | 0.30 | 0.77 | 5.12 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bae, S.; Joo, S.; Choi, J.; Pyo, J.; Park, H.; Kuc, T. Semantic Knowledge-Based Hierarchical Planning Approach for Multi-Robot Systems. Electronics 2023, 12, 2131. https://doi.org/10.3390/electronics12092131
Bae S, Joo S, Choi J, Pyo J, Park H, Kuc T. Semantic Knowledge-Based Hierarchical Planning Approach for Multi-Robot Systems. Electronics. 2023; 12(9):2131. https://doi.org/10.3390/electronics12092131
Chicago/Turabian StyleBae, Sanghyeon, Sunghyeon Joo, Junhyeon Choi, Jungwon Pyo, Hyunjin Park, and Taeyong Kuc. 2023. "Semantic Knowledge-Based Hierarchical Planning Approach for Multi-Robot Systems" Electronics 12, no. 9: 2131. https://doi.org/10.3390/electronics12092131
APA StyleBae, S., Joo, S., Choi, J., Pyo, J., Park, H., & Kuc, T. (2023). Semantic Knowledge-Based Hierarchical Planning Approach for Multi-Robot Systems. Electronics, 12(9), 2131. https://doi.org/10.3390/electronics12092131