
An Indoor 3D Positioning Method Using Terrain Feature Matching for PDR Error Calibration


Abstract
:1. Introduction
2. Related Works
2.1. Altitude Estimation
2.2. PDR Error Calibration with Feature Matching
3. TFMC Method
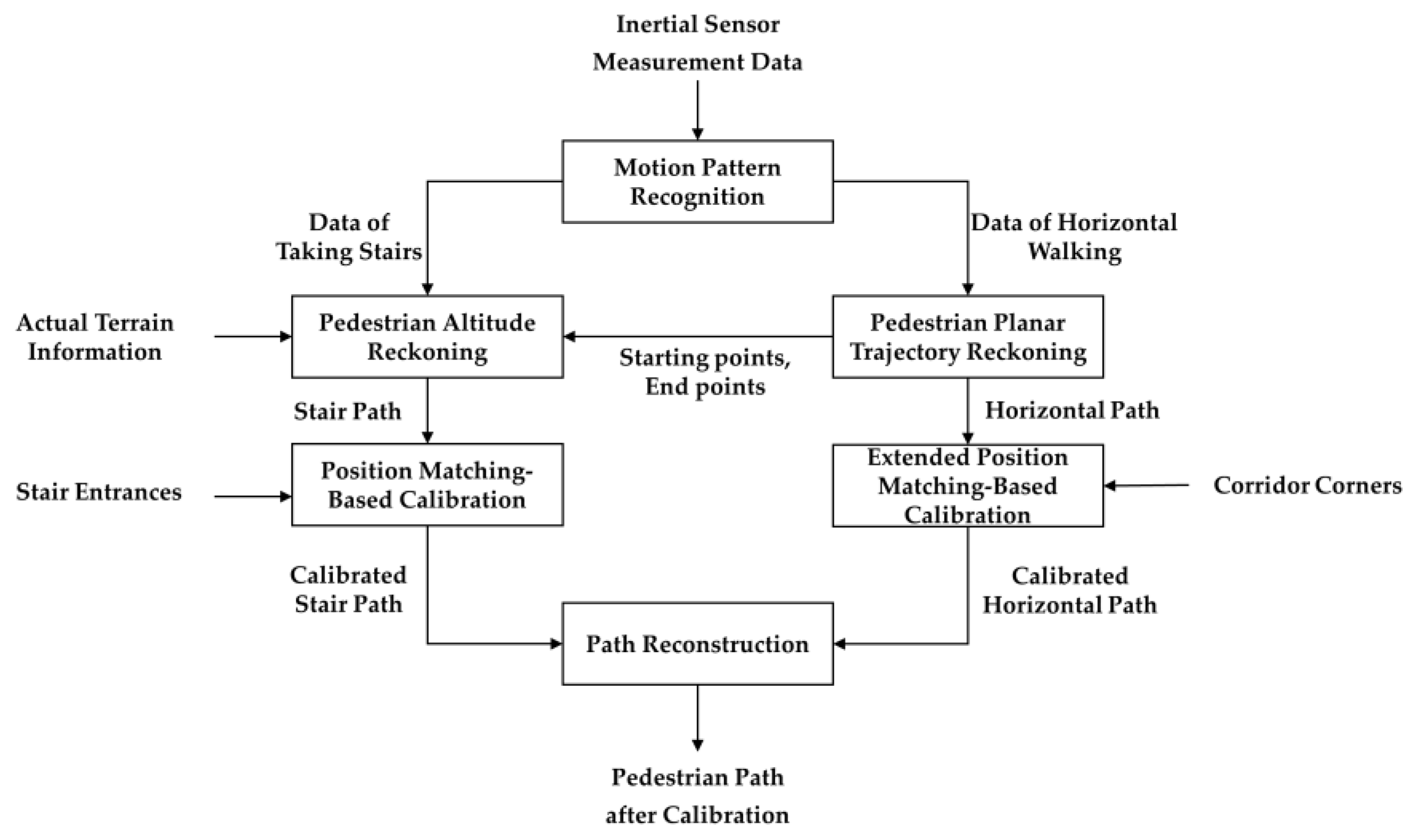
3.1. Method Overview
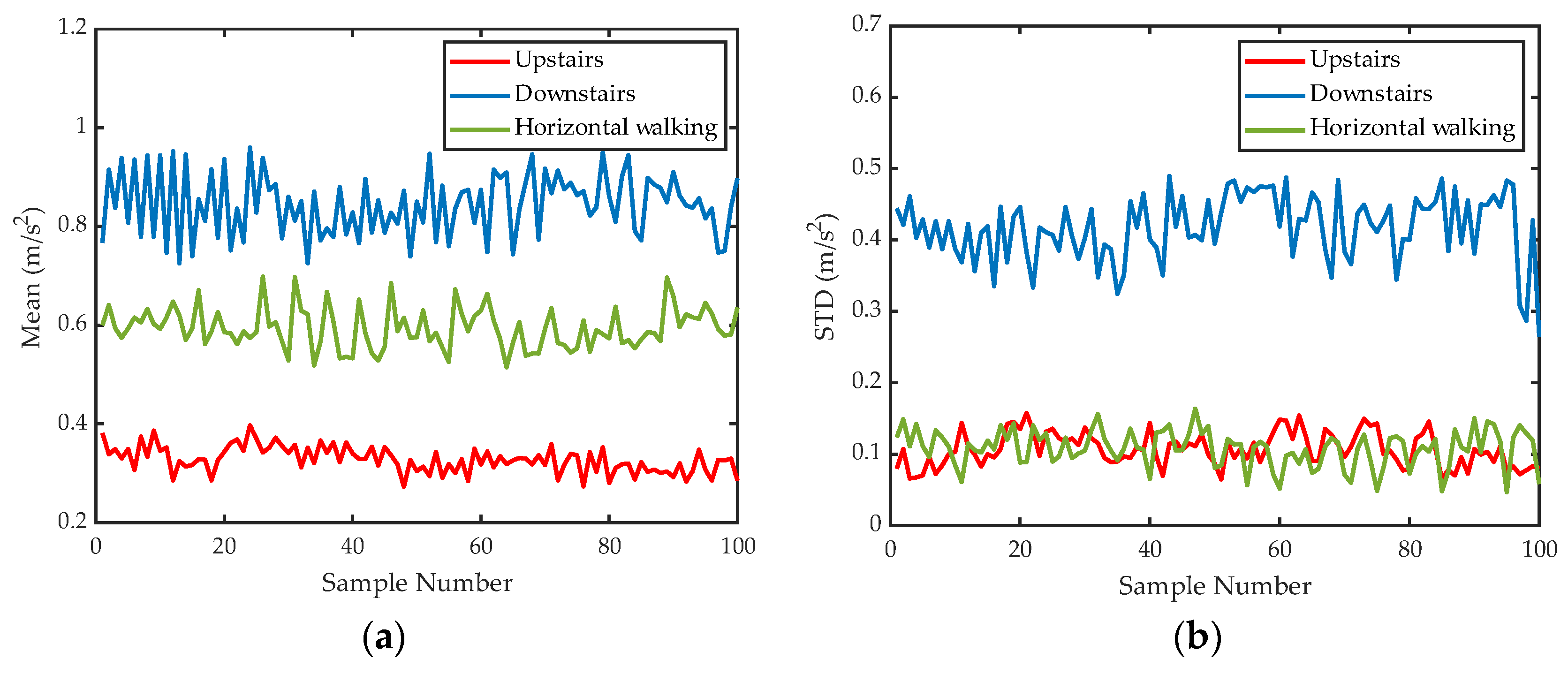
3.2. Motion Pattern Recognition
3.3. Pedestrian Planar Trajectory Reckoning and Pedestrian Altitude Reckoning
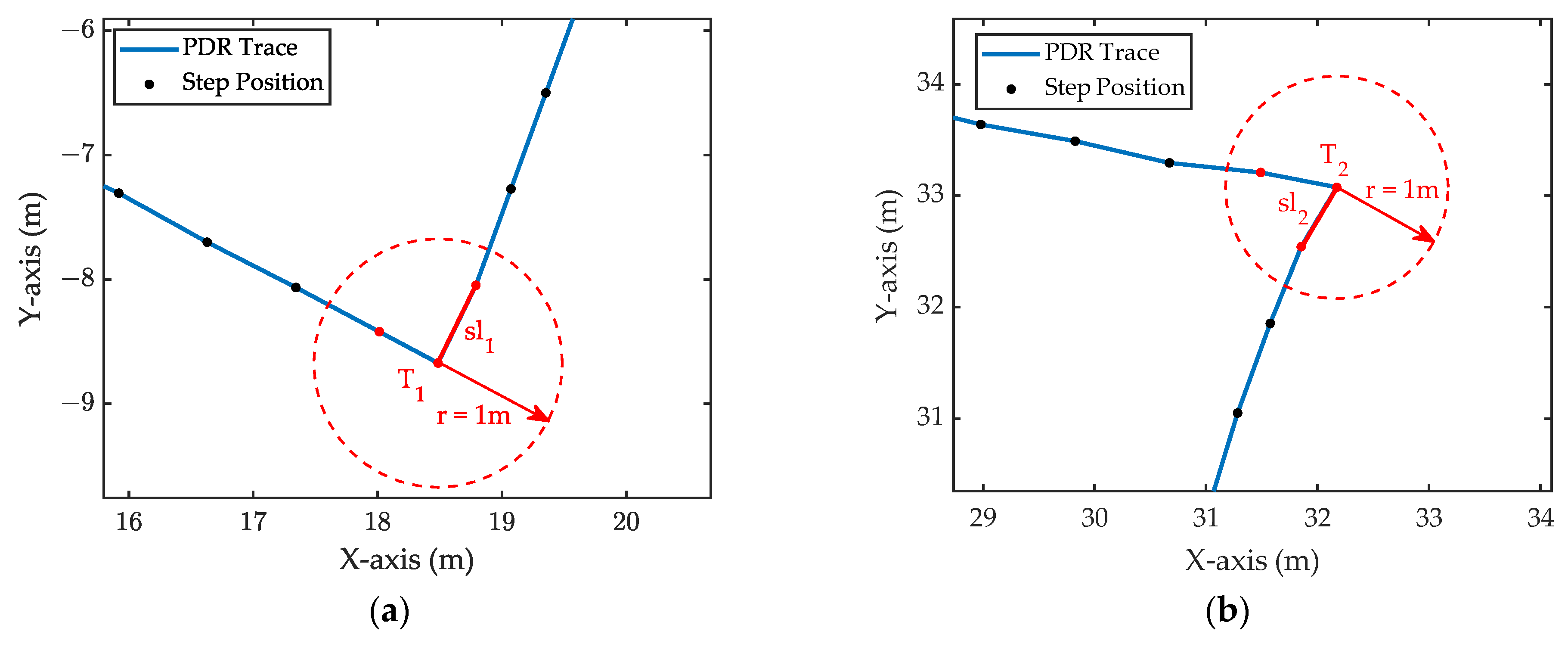
3.4. Position Matching-Based Calibration on Stair Path
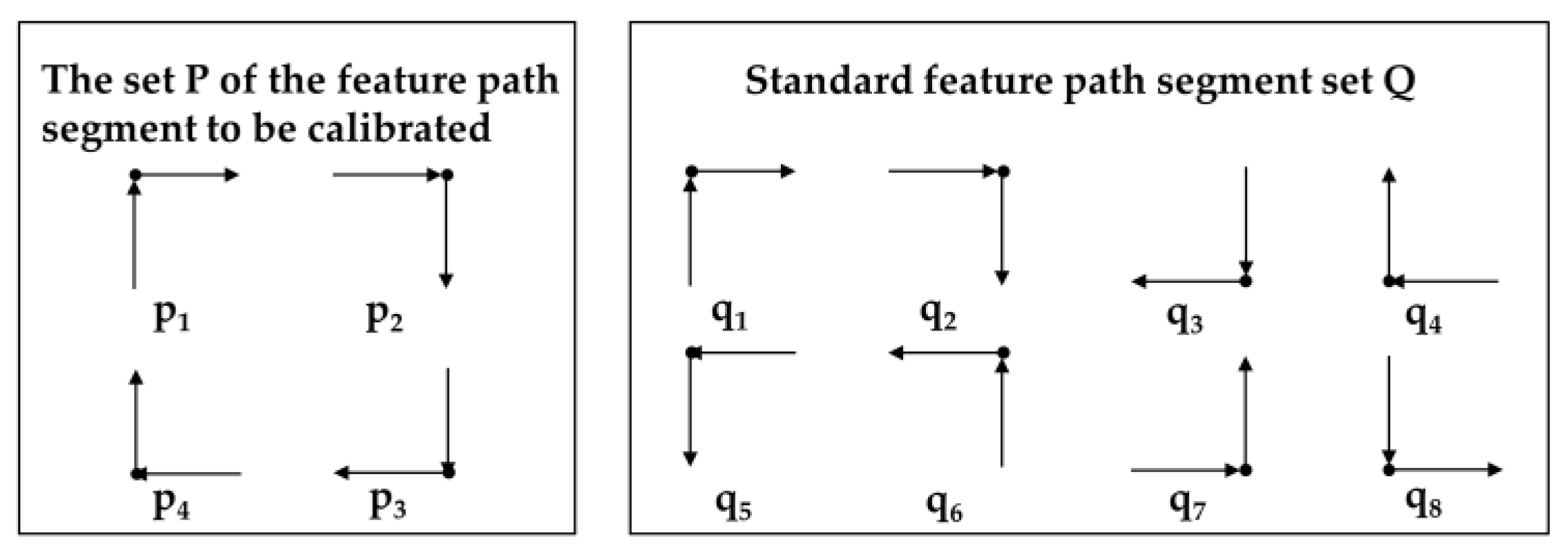
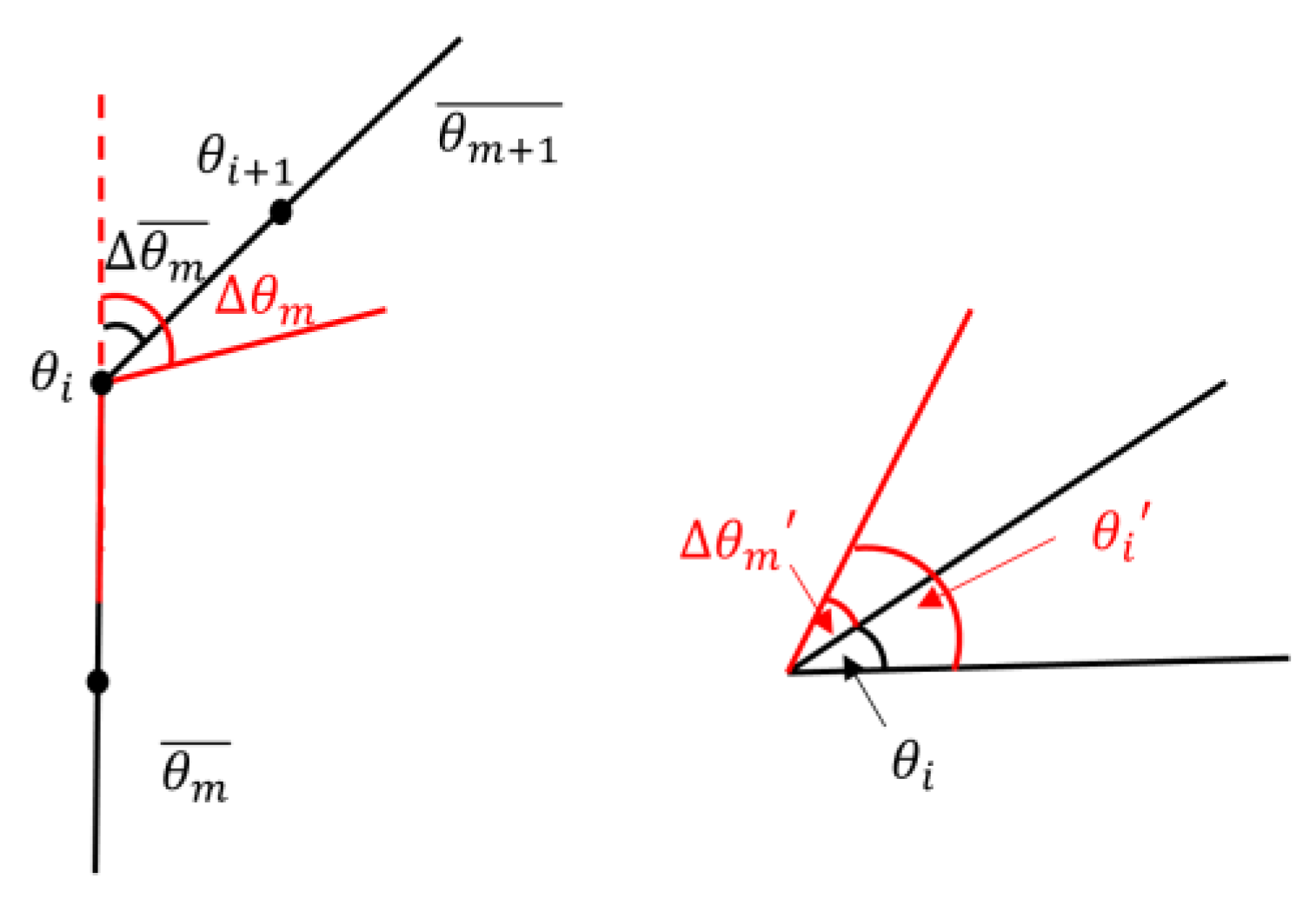
3.5. Extended Position Matching-Based Calibration on Horizontal Path
4. Experiments
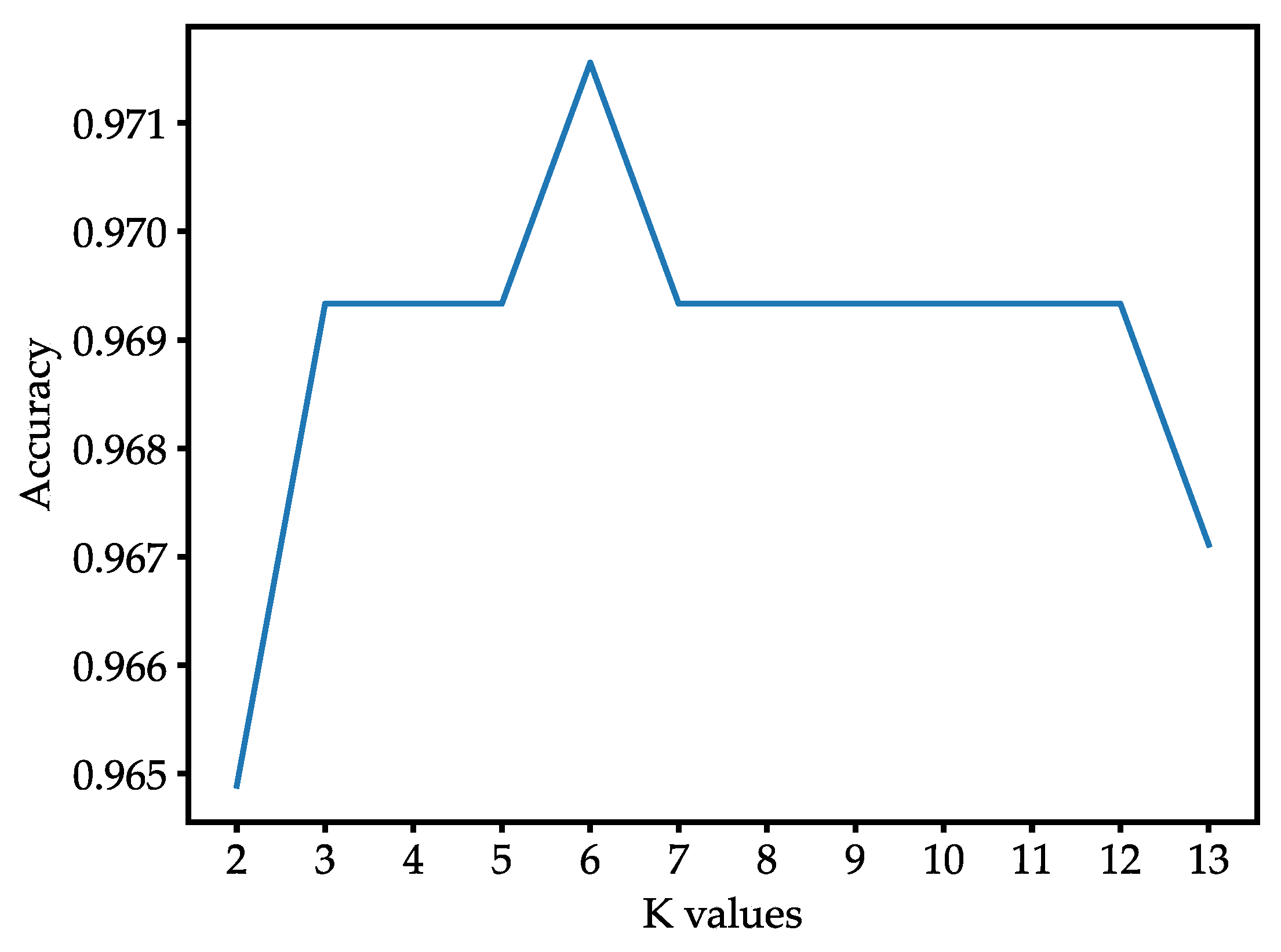
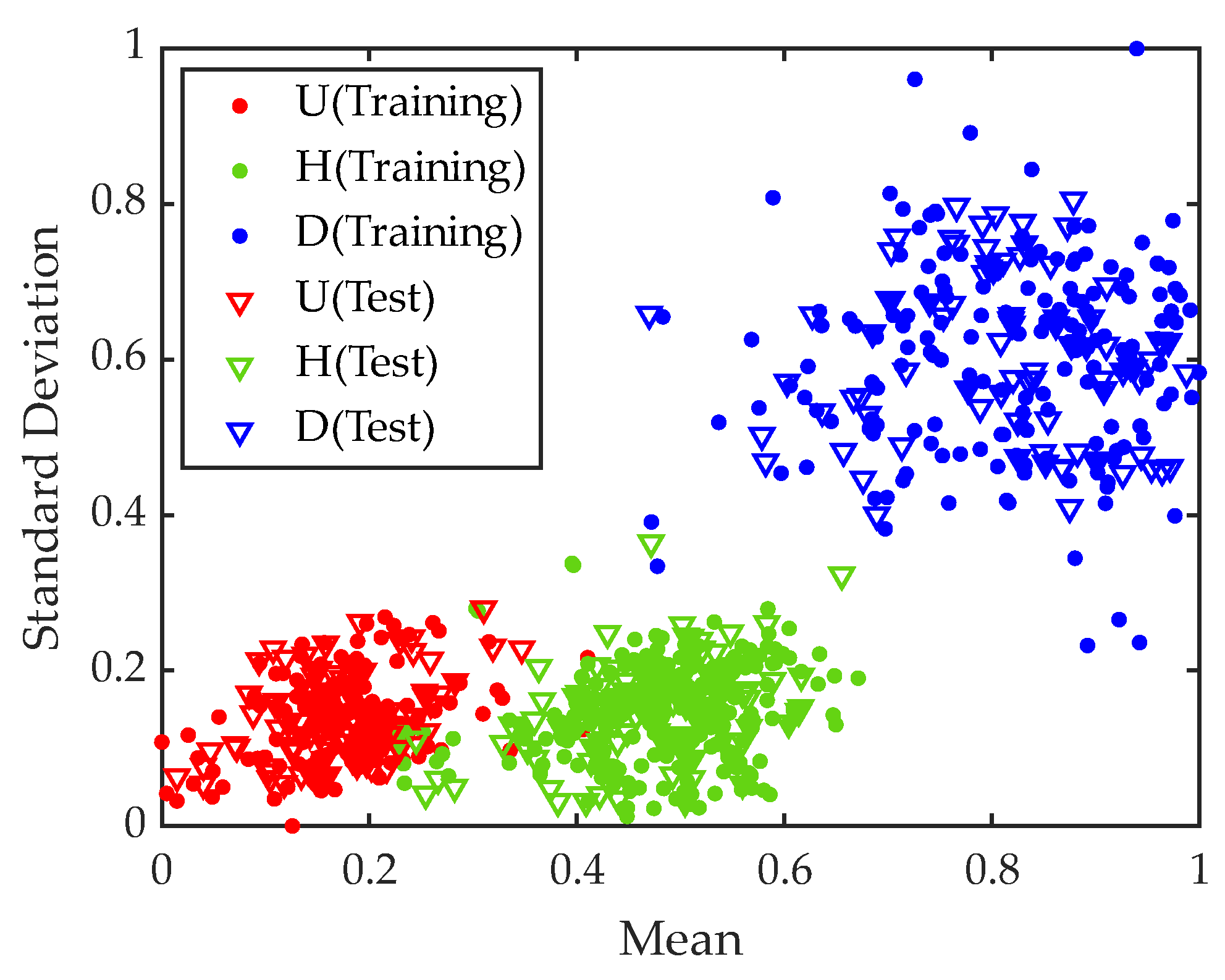
4.1. Motion Pattern Recognition Experiment
4.2. PDR Calibration Experiment
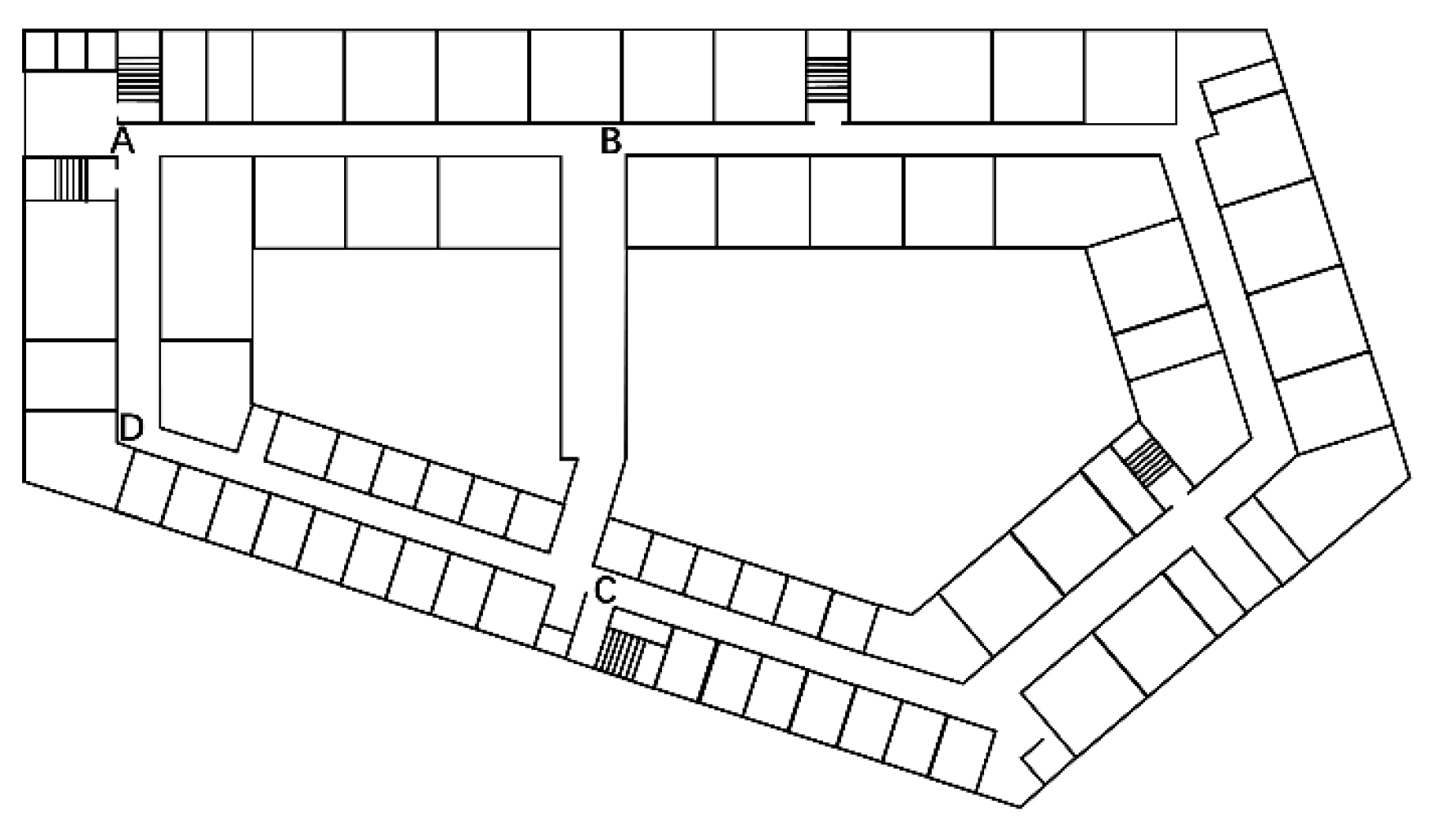
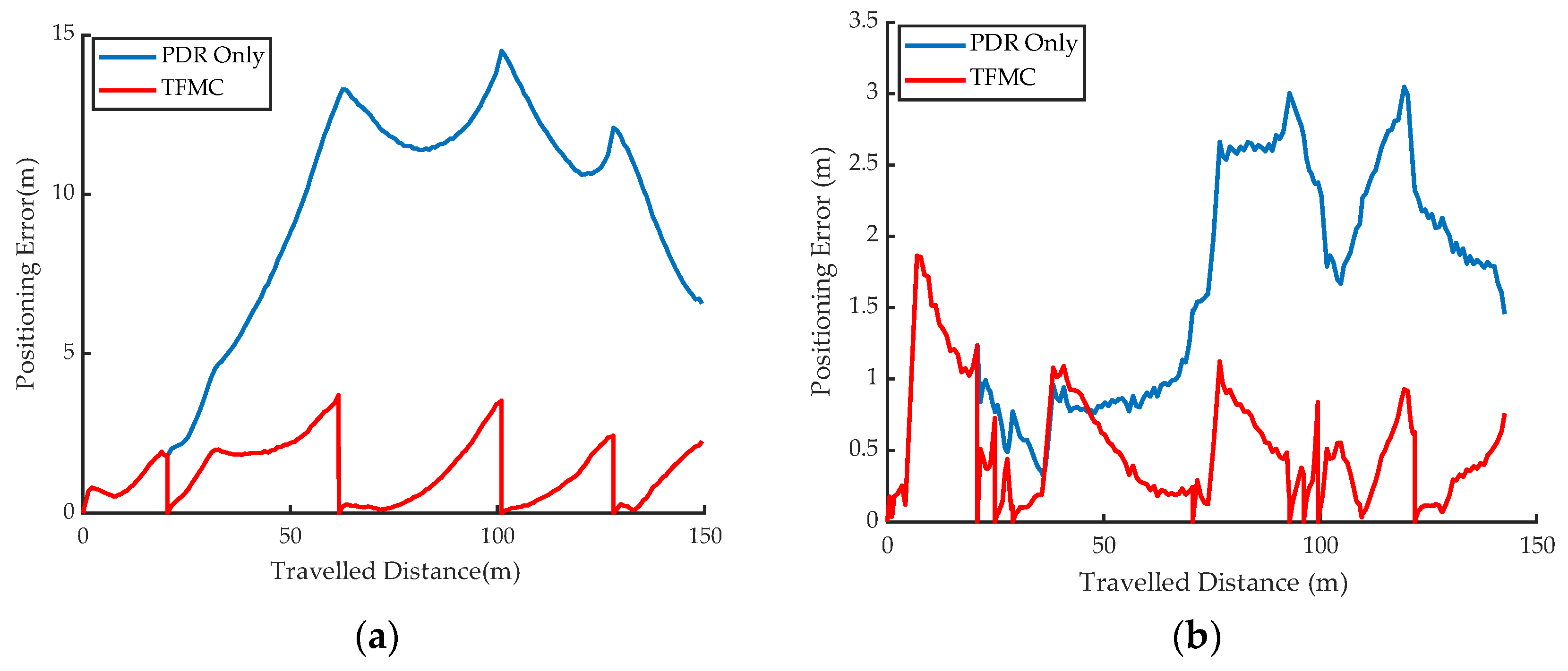
- For the horizontal walking path, the pedestrian walked at a constant speed in the following order: starting point → C → B → A → D, covering a walking distance of approximately 150 m.
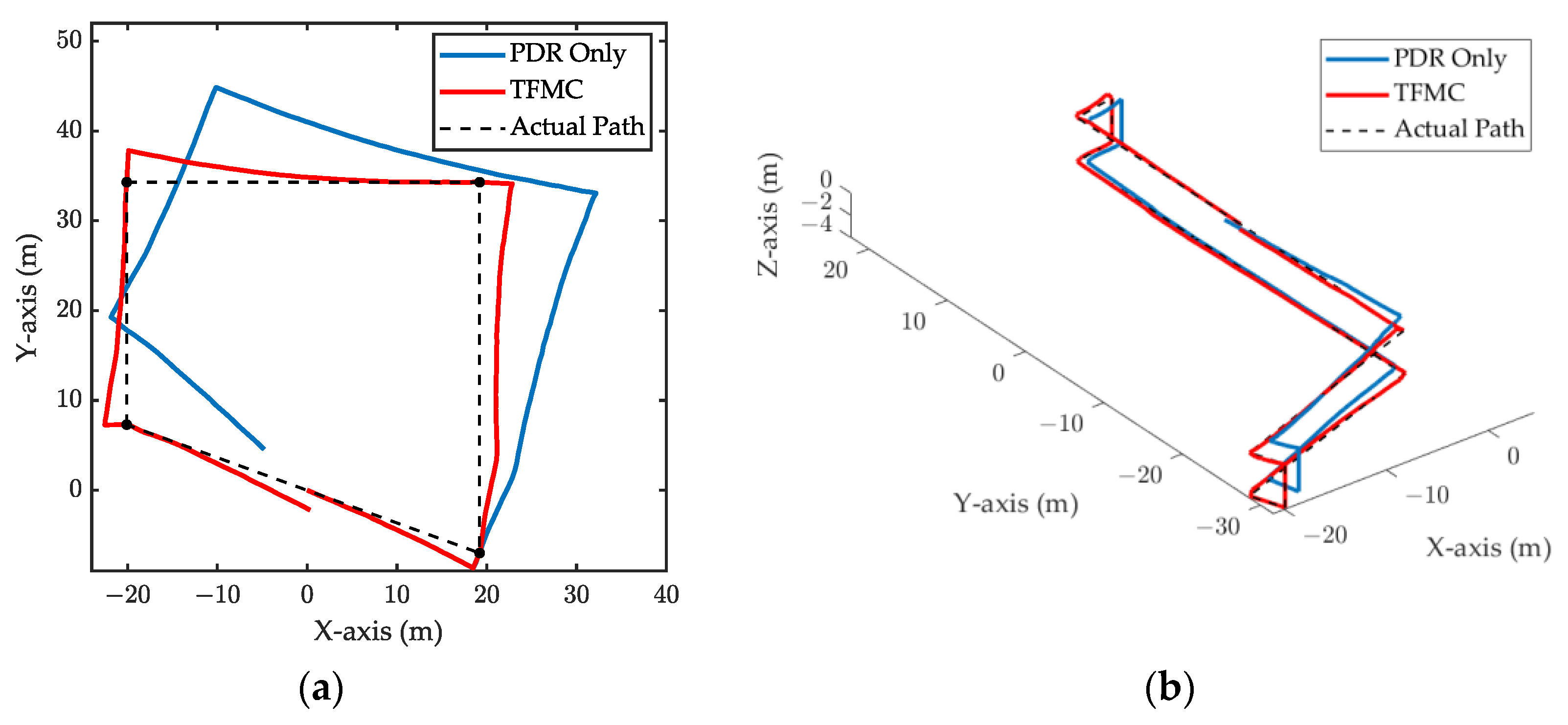
- For the three-dimensional walking path, the pedestrian walked at a constant speed, following this order: walking half a circle on the 4th floor → going downstairs → walking half a circle on the 3rd floor → going upstairs → walking back to the starting point on the 4th floor. The total covered walking distance is approximately 145 m.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Hu, J.; Zhang, H.; Di, B.; Bian, K.; Han, Z.; Song, L. MetaRadar: Indoor Localization by Reconfigurable Metamaterials. IEEE Trans. Mob. Comput. 2022, 21, 2895–2908. [Google Scholar] [CrossRef]
- Bastos, A.S.; Vieira, V.; ApolinArio, A.L. Indoor location systems in emergency scenarios: A Survey. In Proceedings of the Annual Conference on Brazilian Symposium on Information Systems: Information Systems: A Computer Socio-Technical Perspective—Volume 1, Goiania, GO, Brazil, 26–29 May 2015; pp. 251–258. [Google Scholar]
- Shipkovenski, G.; Kalushkov, T.; Petkov, E.; Angelov, V. A Beacon-Based Indoor Positioning System for Location Tracking of Patients in Hospital. In Proceedings of the 2nd International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–27 June 2020; pp. 514–519. [Google Scholar]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Yuan, C.; Lai, J.Z.; Lyu, P.; Shi, P.; Zhao, W.; Huang, K. A Novel Fault-Tolerant Navigation and Positioning Method with Stereo-Camera/Micro Electro Mechanical Systems Inertial Measurement Unit (MEMS-IMU) in Hostile Environment. Micromachines 2018, 9, 626. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.Y.; Zhang, Z.Y.; Tian, Z.S.; Zhou, M. Low-Cost BD/MEMS Tightly-Coupled Pedestrian Navigation Algorithm. Micromachines 2016, 7, 91. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Z.L.; Wen, H.K.; Markham, A.; Trigoni, N. Robust pedestrian dead reckoning (R-PDR) for arbitrary mobile device placement. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Minist Land Infrastructure & Transport, Buan, Republic of Korea, 17–30 October 2014; pp. 187–196. [Google Scholar]
- Wang, Y.; Zhao, H. Improved Smartphone-Based Indoor Pedestrian Dead Reckoning Assisted by Visible Light Positioning. IEEE Sens. J. 2019, 19, 2902–2908. [Google Scholar] [CrossRef]
- He, K.; Zhang, Y.Y.; Zhu, Y.P.; Xia, W.W.; Jia, Z.Y.; Shen, L.F. A Hybrid Indoor Positioning System Based on UWB and Inertial Navigation. In Proceedings of the 7th IEEE International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 15–17 October 2015. [Google Scholar]
- Du, X.Q.; Liao, X.W.; Liu, M.M.; Gao, Z.Z. CRCLoc: A Crowdsourcing-Based Radio Map Construction Method for WiFi Fingerprinting Localization. IEEE Internet Things J. 2021, 9, 12364–12377. [Google Scholar] [CrossRef]
- Koo, B.; Lee, S.; Lee, M.; Lee, D.; Lee, S.; Kim, S. PDR/Fingerprinting Fusion Indoor Location Tracking Using RSS Recovery and Clustering. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Minist Land Infrastructure & Transport, Buan, Republic of Korea, 27–30 October 2014; pp. 699–704. [Google Scholar]
- Wang, Q.; Luo, H.; Xiong, H.; Men, A.; Zhao, F.; Xia, M.; Ou, C. Pedestrian Dead Reckoning Based on Walking Pattern Recognition and Online Magnetic Fingerprint Trajectory Calibration. IEEE Internet Things J. 2021, 8, 2011–2026. [Google Scholar] [CrossRef]
- Zhao, T.Y.; Ahamed, M.J. Pseudo-Zero Velocity Re-Detection Double Threshold Zero-Velocity Update (ZUPT) for Inertial Sensor-Based Pedestrian Navigation. IEEE Sens. J. 2021, 21, 13772–13785. [Google Scholar] [CrossRef]
- Wei, R.; Xu, H.; Yang, M.; Yu, X.; Xiao, Z.; Yan, B. Real-Time Pedestrian Tracking Terminal Based on Adaptive Zero Velocity Update. Sensors 2021, 21, 3808. [Google Scholar] [CrossRef]
- Yu, N.; Li, Y.; Ma, X.; Wu, Y.; Feng, R. Comparison of Pedestrian Tracking Methods Based on Foot- and Waist-Mounted Inertial Sensors and Handheld Smartphones. IEEE Sens. J. 2019, 19, 8160–8173. [Google Scholar] [CrossRef]
- Liu, Z.X.; Won, C.H. Knee and Waist Attached Gyroscopes for Personal Navigation: Comparison of Knee, Waist and Foot Attached Inertial Sensors. In Proceedings of the Position Location and Navigation Symposium (PLANS), Palm Springs, CA, USA, 4–6 May 2010; pp. 1042–1048. [Google Scholar]
- Li, H.; Liu, Y.; Zhang, L.Q.; Wang, H. Magnetic Matching-Aided Indoor Localization System Based on a Waist-Mounted Self-Contained Sensor Array. J. Sens. 2022, 2022, 1710907. [Google Scholar] [CrossRef]
- Shi, J.; Ren, M.; Wang, P.; Meng, J. Research on PF-SLAM Indoor Pedestrian Localization Algorithm Based on Feature Point Map. Micromachines 2018, 9, 267. [Google Scholar] [CrossRef] [PubMed]
- Zizzo, G.; Ren, L. Position Tracking During Human Walking Using an Integrated Wearable Sensing System. Sensors 2017, 17, 2866. [Google Scholar] [CrossRef] [PubMed]
- Gu, F.; Valaee, S.; Khoshelham, K.; Shang, J.; Zhang, R. Landmark Graph-Based Indoor Localization. IEEE Internet Things J. 2020, 7, 8343–8355. [Google Scholar] [CrossRef]
- Ghaoui, M.A.; Vincke, B.; Reynaud, R. Human Motion Likelihood Representation Map-Aided PDR Particle Filter. IEEE Sens. J. 2023, 23, 484–494. [Google Scholar] [CrossRef]
- Yang, W.; Xiu, C.D.; Zhang, J.M.; Yang, D.K. A Novel 3D Pedestrian Navigation Method for a Multiple Sensors-Based Foot-Mounted Inertial System. Sensors 2017, 17, 2695. [Google Scholar] [CrossRef]
- Zhao, Y.L.; Liang, J.Q.; Sha, X.P.; Yu, J.N.; Duan, H.J.; Shi, G.Y.; Li, W.J. Estimation of Pedestrian Altitude Inside a Multi-Story Building Using an Integrated Micro-IMU and Barometer Device. IEEE Access 2019, 7, 84680–84689. [Google Scholar] [CrossRef]
- Nam, L.S. Pedestrian Navigation System in Mountainous non-GPS Environments. J. Inf. Commun. Converg. Eng. 2021, 19, 188–197. [Google Scholar] [CrossRef]
- Xie, D.P.; Jiang, J.G.; Yan, P.H.; Wu, J.J.; Li, Y.Y.; Yu, Z.Y. A Novel Three-Dimensional Positioning Method for Foot-Mounted Pedestrian Navigation System Using Low-Cost Inertial Sensor. Electronics 2023, 12, 845. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, M.X.; Guo, Z.W.; Hu, N.J.; Sun, Z.W.; Liu, J. An Indoor Positioning Method for Smartphones Using Landmarks and PDR. Sensors 2016, 16, 2135. [Google Scholar] [CrossRef]
- Xia, M.; Shi, C. Autonomous Pedestrian Altitude Estimation Inside a Multi-Story Building Assisted by Motion Recognition. IEEE Access 2020, 8, 104718–104727. [Google Scholar] [CrossRef]
- Elhoushi, M.; Georgy, J.; Noureldin, A.; Korenberg, M.J. Motion Mode Recognition for Indoor Pedestrian Navigation Using Portable Devices. IEEE Trans. Instrum. Meas. 2016, 65, 208–221. [Google Scholar] [CrossRef]
- Fang, Q.; Xu, X.; Wang, X.T.; Zeng, Y.J. Target-driven visual navigation in indoor scenes using reinforcement learning and imitation learning. CAAI Trans. Intell. Technol. 2022, 7, 167–176. [Google Scholar] [CrossRef]
- Alaoui, F.T.; Renaudin, V.; Betaille, D. Points of Interest Detection for Map-Aided PDR in Combined Outdoor-Indoor spaces. In Proceedings of the 8th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Wang, G.J.; Li, Q.Q.; Wang, L.; Wang, W.; Wu, M.Q.; Liu, T. Impact of Sliding Window Length in Indoor Human Motion Modes and Pose Pattern Recognition Based on Smartphone Sensors. Sensors 2018, 18, 1965. [Google Scholar] [CrossRef] [PubMed]
- Xia, H.; Zuo, J.B.; Liu, S.; Qiao, Y.Y. Indoor Localization on Smartphones Using Built-In Sensors and Map Constraints. IEEE Trans. Instrum. Meas. 2019, 68, 1189–1198. [Google Scholar] [CrossRef]
- Khedr, M.; El-Sheimy, N. A Smartphone Step Counter Using IMU and Magnetometer for Navigation and Health Monitoring Applications. Sensors 2017, 17, 2573. [Google Scholar] [CrossRef] [PubMed]
- Weinberg, H. Using the ADXL202 in Pedometer and Personal Navigation Applications; AN-602 Application Note; One Technology Way: Norwood, MA, USA, 2002; pp. 1–6. [Google Scholar]
- Jang, B.; Kim, H.; Kim, J.W. Survey of Landmark-based Indoor Positioning Technologies. Inf. Fusion 2023, 89, 166–188. [Google Scholar] [CrossRef]
- Xue, Y.; Jin, L.W. Discrimination between Upstairs and Downstairs Based on Accelerometer. IEICE Trans. Inf. Syst. 2011, E94D, 1173–1177. [Google Scholar] [CrossRef]
- Susi, M.; Borio, D.; Lachapelle, G. Accelerometer signal features and classification algorithms for positioning applications. In Proceedings of the Institute of Navigation—International Technical Meeting 2011, San Diego, CA, USA, 24–26 January 2011; pp. 158–169. [Google Scholar]
- He, S.N.; Chan, S.H.G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons. IEEE Commun. Surv. Tutor. 2016, 18, 466–490. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input: | represents the category of the instance. |
| Steps: |
|
| Output: | belongs. |
| Motion Pattern | Pattern Classification Results | |||
|---|---|---|---|---|
| Upstairs | Horizontal Walking | Downstairs | Accuracy | |
| Upstairs | 430 | 12 | 0 | 97.29% |
| Horizontal walking | 23 | 597 | 3 | 95.83% |
| Downstairs | 0 | 7 | 443 | 98.44% |
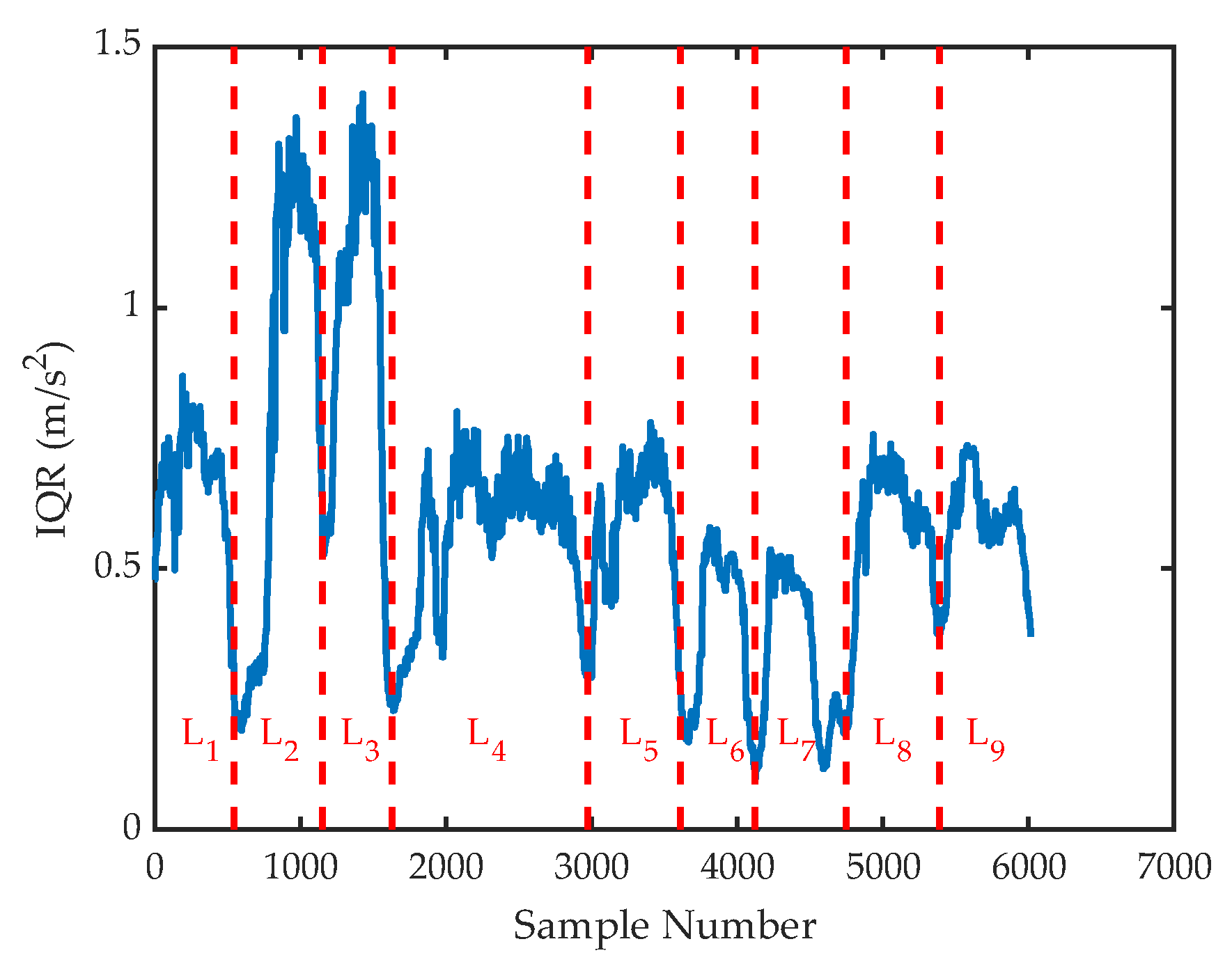
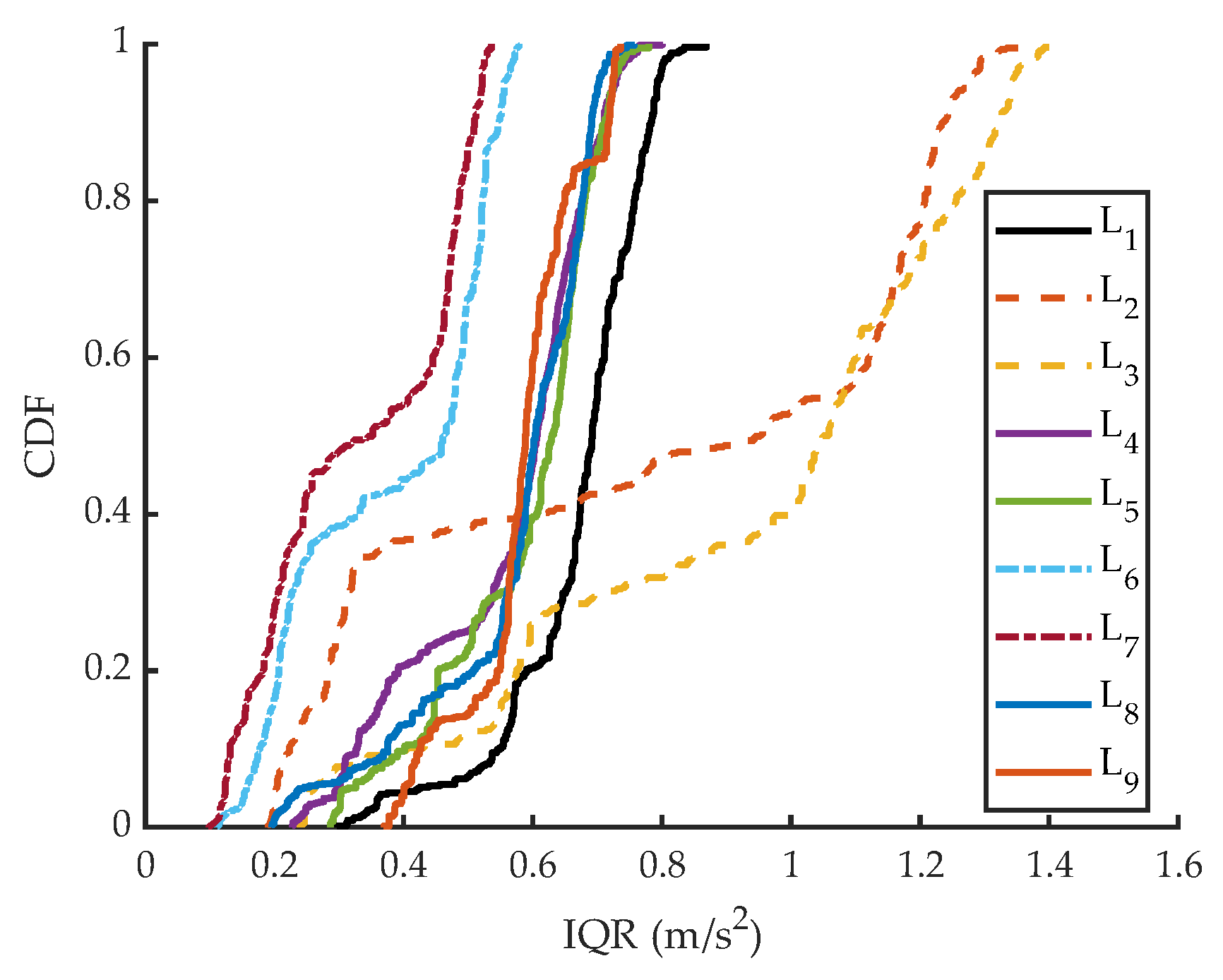
| Walking Data | L1 | L2 | L3 | L4 | L5 | L6 | L7 | L8 | L9 |
|---|---|---|---|---|---|---|---|---|---|
| Classification result | H | D | D | H | H | U | U | H | H |
| Positioning Error | PDR Only | TFMC |
|---|---|---|
| Average error (m) | 6.60 | 1.37 |
| Maximum error (m) | 12.15 | 3.00 |
| RMSE (m) | 7.45 | 1.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Xie, Y.; Zhou, Z.; He, Y.; Wang, Q.; Chen, Z. An Indoor 3D Positioning Method Using Terrain Feature Matching for PDR Error Calibration. Electronics 2024, 13, 1468. https://doi.org/10.3390/electronics13081468
Chen X, Xie Y, Zhou Z, He Y, Wang Q, Chen Z. An Indoor 3D Positioning Method Using Terrain Feature Matching for PDR Error Calibration. Electronics. 2024; 13(8):1468. https://doi.org/10.3390/electronics13081468
Chicago/Turabian StyleChen, Xintong, Yuxin Xie, Zihan Zhou, Yingying He, Qianli Wang, and Zhuming Chen. 2024. "An Indoor 3D Positioning Method Using Terrain Feature Matching for PDR Error Calibration" Electronics 13, no. 8: 1468. https://doi.org/10.3390/electronics13081468
APA StyleChen, X., Xie, Y., Zhou, Z., He, Y., Wang, Q., & Chen, Z. (2024). An Indoor 3D Positioning Method Using Terrain Feature Matching for PDR Error Calibration. Electronics, 13(8), 1468. https://doi.org/10.3390/electronics13081468