A “Smart” Trap Device for Detection of Crawling Insects and Other Arthropods in Urban Environments



Abstract
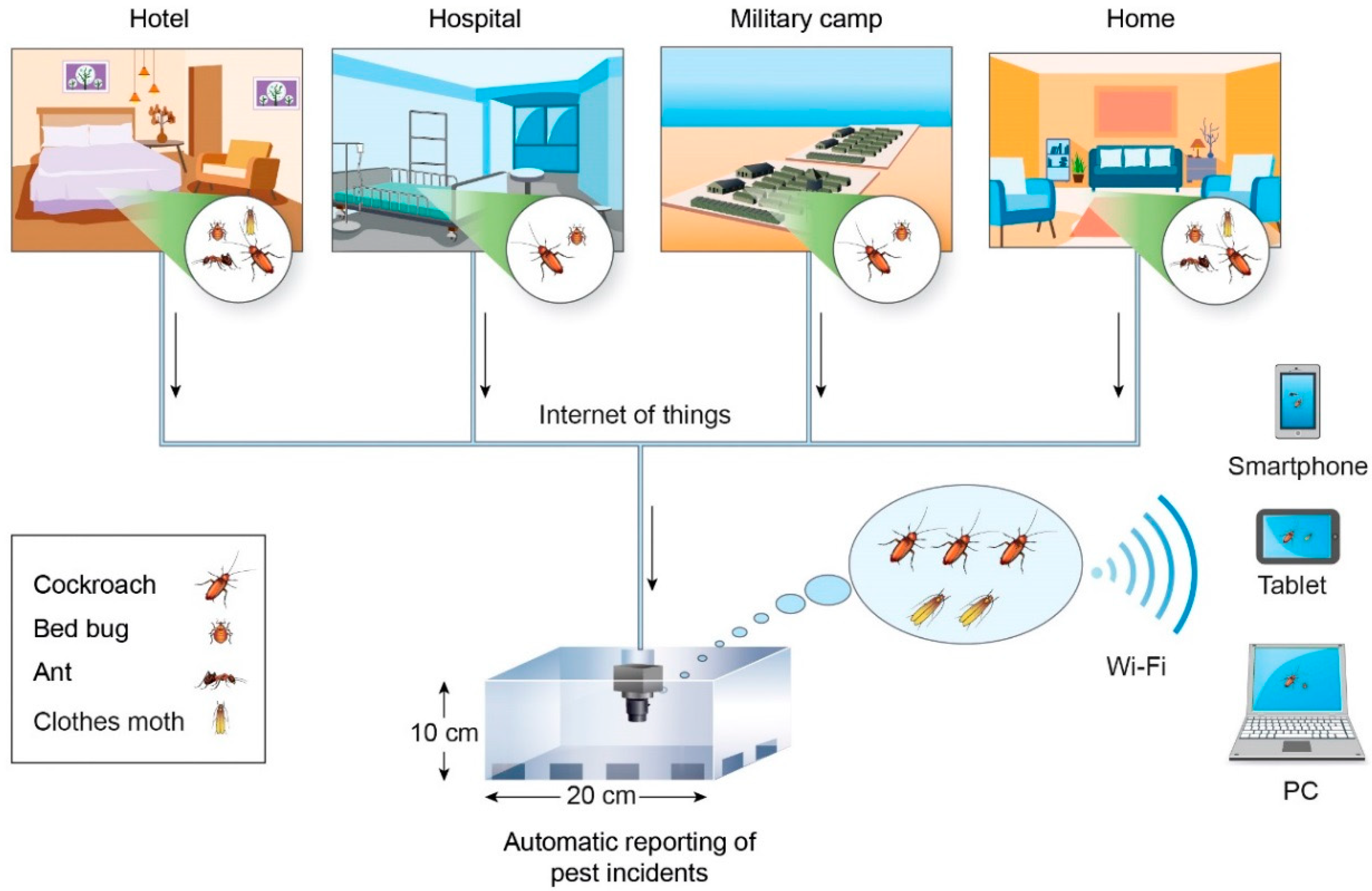
:1. Introduction
2. Materials and Methods
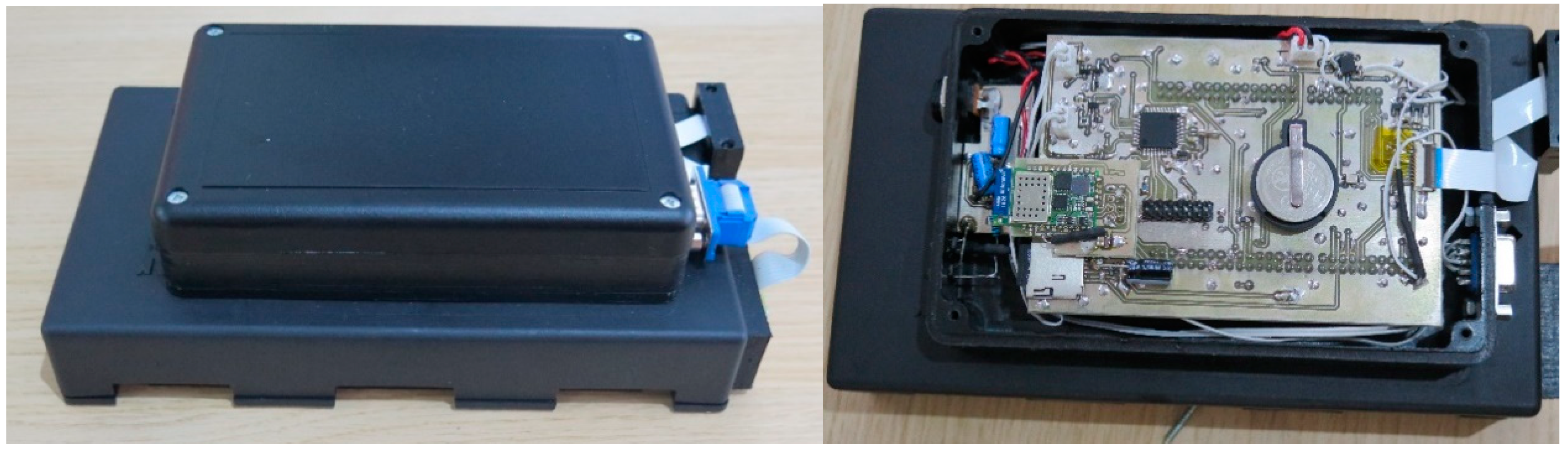
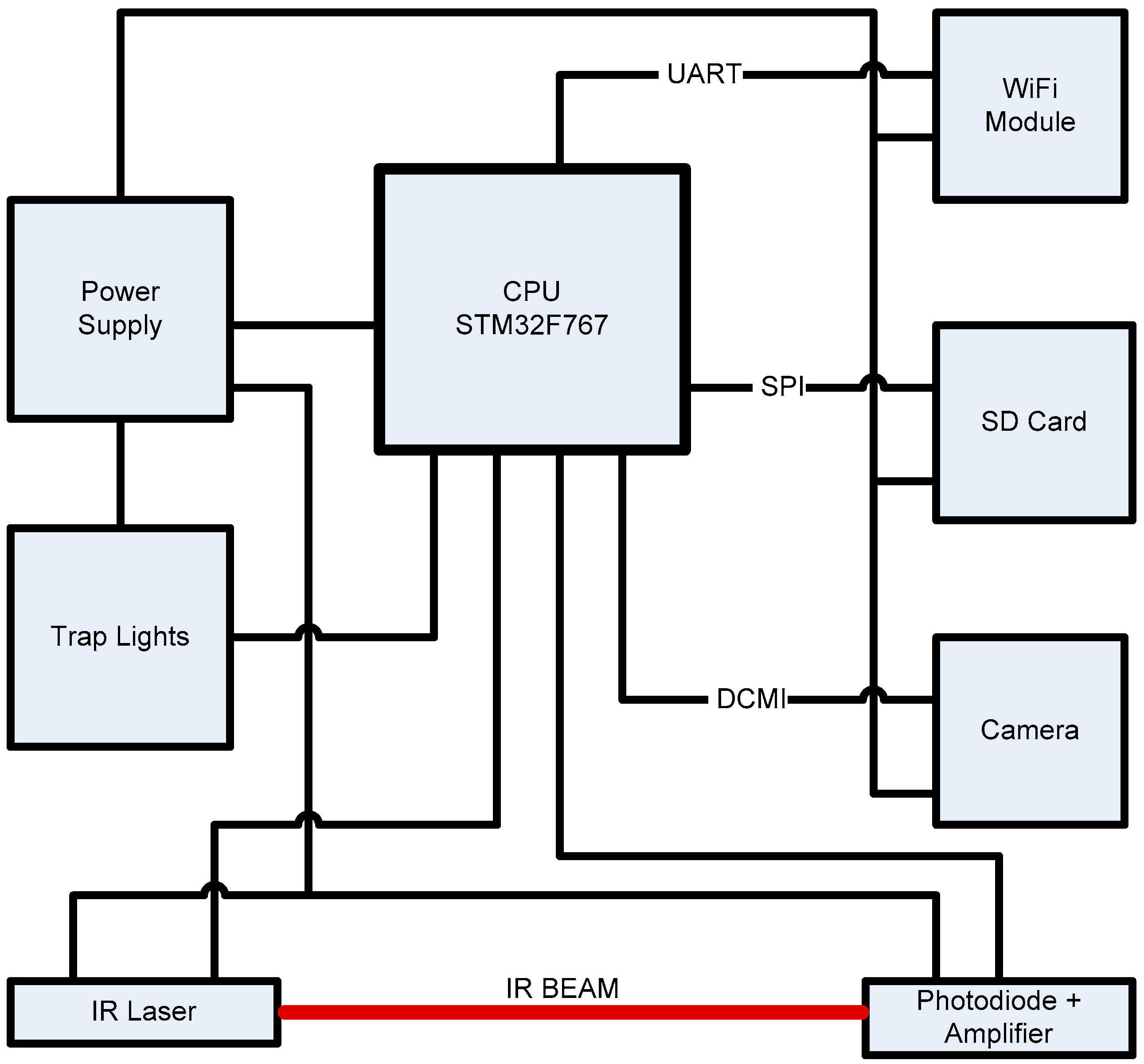
2.1. Trap Design and Function
2.2. Evaluation
- (a)
- in an old food warehouse with an increased presence of cockroaches in Agrinio, Central Greece. Trap placement lasted from early to mid-May 2018.
- (b)
- in a livestock unit with large ant populations in Larissa, Central Greece. Trap placement lasted from early to mid-April 2018.
- (c)
- in an old-style granary (horizontal type) with a heavy insect infestation in stored wheat mass in Farsala, Central Greece. Trap placement lasted from early to mid-March 2018.
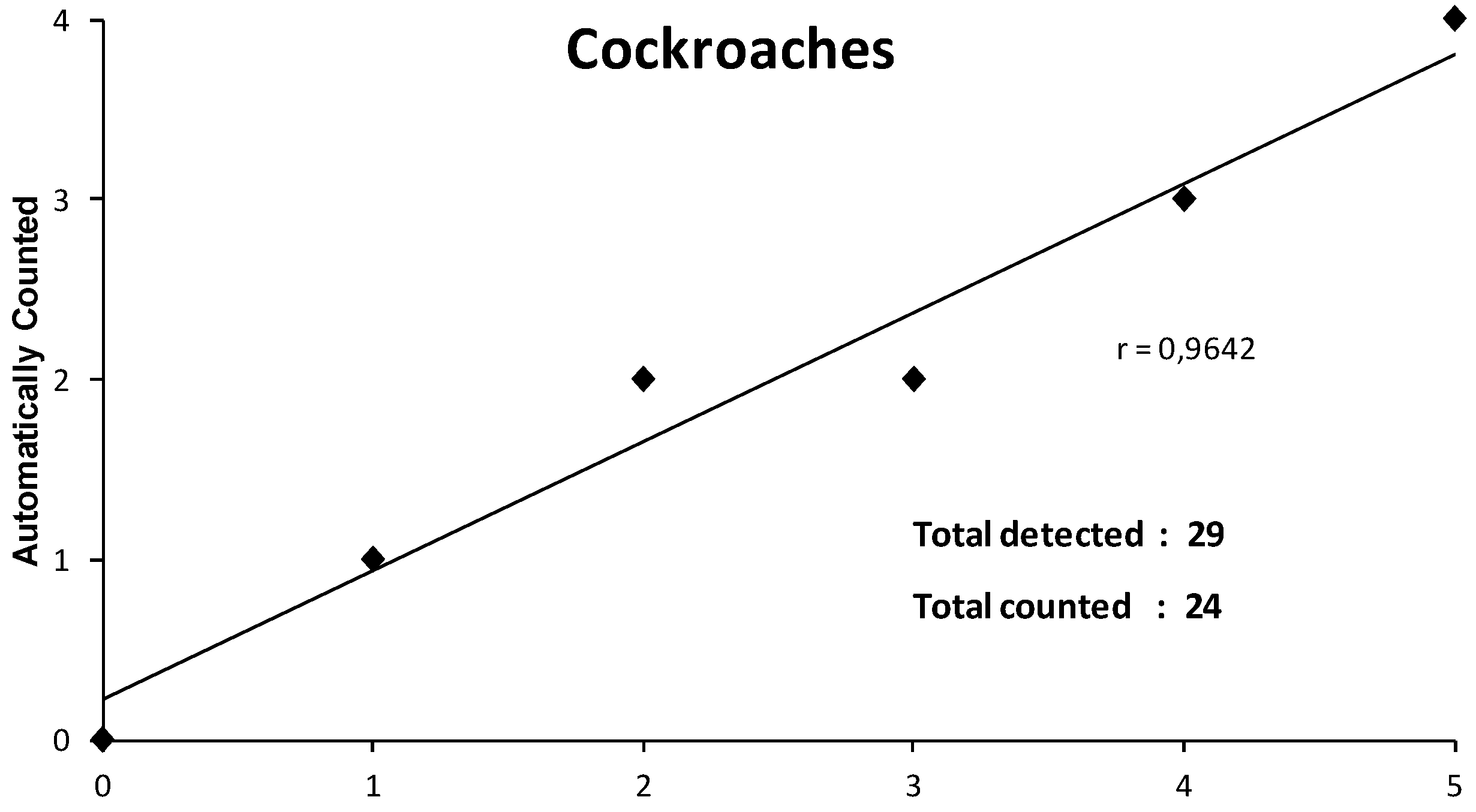
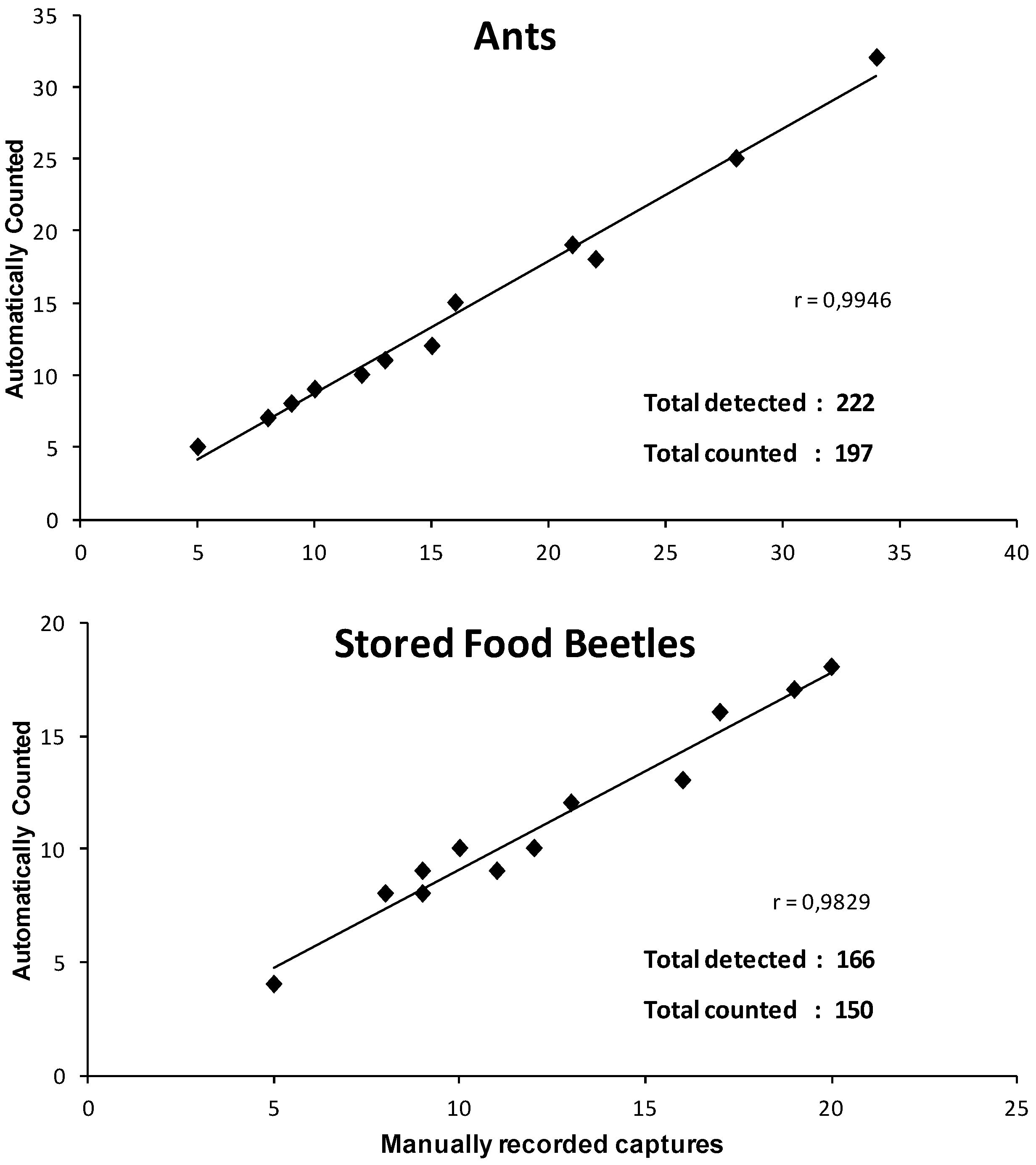
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- European Commission. Making Our Cities Attractive and Sustainable: How the EU Contributes to Improving the Urban Environment; Publications Office of the European Union: Luxembourg, 2010. [Google Scholar]
- Robinson, W.H. Urban Insects and Arachnids: A Handbook of Urban Entomology; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- McIntyre, N.E. Ecology of urban arthropods: A review and a call to action. Ann. Entomol. Soc. Am. 2000, 93, 825–835. [Google Scholar] [CrossRef]
- Bonnefoy, X.; Kampen, H.; Sweeney, K. Public Health Significance of Urban Pests; World Health Organization: Geneva, Switzerland, 2008. [Google Scholar]
- Dhang, P. Urban Pest Management: An Environmental Perspective; CABI: Oxfordshire, UK, 2011. [Google Scholar]
- Dhang, P. Urban Insect Pests: Sustainable Management Strategies; CABI: Oxfordshire, UK, 2014. [Google Scholar]
- Owens, J.M.; Bennett, G.W. Comparative study of German cockroach (Dictyoptera: Blattellidae) population sampling techniques. Environ. Entomol. 1983, 12, 1040–1046. [Google Scholar] [CrossRef]
- Kaakeh, W.; Bennett, G.W. Evaluation of trapping and vacuuming compared with low-impact insecticide tactics for managing German cockroaches in residences. J. Econ. Entomol. 1997, 90, 976–982. [Google Scholar] [CrossRef]
- Ballard, J.B.; Gold, R.E. Field evaluation of two trap designs used for control of German cockroach populations. J. Kansas Entomol. Soc. 1983, 56, 506–510. [Google Scholar]
- Rivault, C.; Cloarec, A.; Le Guyader, A. Bacterial load of cockroaches in relation to urban environment. Epidemiol. Infect. 1993, 110, 317–325. [Google Scholar] [CrossRef] [PubMed]
- Elgderi, R.M.; Ghenghesh, K.S.; Berbash, N. Carriage by the German cockroach (Blattella germanica) of multiple-antibiotic-resistant bacteria that are potentially pathogenic to humans, in hospitals and households in Tripoli, Libya. Ann. Trop. Med. Parasitol. 2006, 100, 55–62. [Google Scholar] [CrossRef] [PubMed]
- Kutrup, B. Cockroach infestation in some hospitals in Trabzon, Turkey. Turk. J. Zool. 2003, 27, 73–77. [Google Scholar]
- Kang, B.; Vellody, D.; Homburger, H.; Yunginger, J.W. Cockroach cause of allergic asthma: Its specificity and immunologic profile. J. Allergy Clin. Immunol. 1979, 63, 80–86. [Google Scholar] [CrossRef]
- Eggleston, P.A.; Arruda, L.K. Ecology and elimination of cockroaches and allergens in the home. J. Allergy Clin. Immunol. 2001, 107, S422–S429. [Google Scholar] [CrossRef] [PubMed]
- Rust, M.K.; Su, N.Y. Managing social insects of urban importance. Annu. Rev. Entomol. 2012, 57, 355–375. [Google Scholar] [CrossRef] [PubMed]
- Máximo, H.J.; Felizatti, H.L.; Ceccato, M.; Cintra-Socolowski, P.; Beretta, A.L. Ants as vectors of pathogenic microorganisms in a hospital in São Paulo county, Brazil. BMC Res. Notes 2014, 7. [Google Scholar] [CrossRef] [PubMed]
- Whitmore, R.W.; Kelly, J.E.; Reading, P.L. National Home and Garden Pesticide Use Survey, Final Report. Volume I: Executive Summary, Results, and Recommendations; USEPA: Washington, DC, USA, 1992.
- Jemal, A.; Hugh-Jones, M. A review of the red imported fire ant (Solenopsis invicta Buren) and its impacts on plant, animal, and human health. Prev. Vet. Med. 1993, 17, 19–32. [Google Scholar] [CrossRef]
- Wetterer, J.K. Worldwide spread of the pharaoh ant, Monomorium pharaonis (Hymenoptera: For-micidae). Myrmecol. News 2010, 13, 115–129. [Google Scholar]
- Hansen, L.D.; Akre, R.D.; Wildey, K.; Robinson, W. Urban pest management of carpenter ants. In Proceedings of the First International Conference on Urban Pests, Cambridge, UK; 1993; pp. 271–279. [Google Scholar]
- Rees, D.P. Insects of Stored Products; Csiro Publishing: Clayton, Australia, 2004. [Google Scholar]
- Subramanyam, B. Integrated Management of Insects in Stored Products; CRC Press: Boca Raton, FL, USA, 1995. [Google Scholar]
- Jansson, S.; Brydegaard, M. Passive kHz lidar for the quantification of insect activity and dispersal. Anim. Biotelem. 2018, 6. [Google Scholar] [CrossRef]
- Perles, A.; Mercado, R.; Capella, J.V.; Serrano, J.J. Ultra-Low power optical sensor for xylophagous insect detection in wood. Sensors 2016, 16, 1977. [Google Scholar] [CrossRef] [PubMed]
- Potamitis, I.; Rigakis, I.; Fysarakis, K. Insect biometrics: Otoacoustic signal processing and its applications to remote monitoring of McPhail type traps. PLoS ONE 2015, 10. [Google Scholar] [CrossRef] [PubMed]
- Potamitis, I.; Rigakis, I.; Tatlas, N.-A. Automated surveillance of fruit flies. Sensors 2017, 17, 110. [Google Scholar] [CrossRef] [PubMed]
- Potamitis, I.; Rigakis, I. Large aperture optoelectronic devices to record and time-stamp insects’ wingbeats. IEEE Sensors J. 2016, 16, 6053–6061. [Google Scholar] [CrossRef]
- Potamitis, I.; Eliopoulos, P.; Rigakis, I. Automated Remote Insect Surveillance at a Global Scale and the Internet of Things. Robotics 2017, 6, 19. [Google Scholar] [CrossRef]
- Zhong, Y.; Gao, J.; Lei, Q.; Zhou, Y. A vision-based counting and recognition system for flying insects in intelligent agriculture. Sensors 2018, 18, 1489. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Bennett, G.W. Comparative study of integrated pest management and baiting for German cockroach management in public housing. J. Econ. Entomol. 2006, 99, 879–885. [Google Scholar] [CrossRef] [PubMed]
- Mankin, R.W.; Hodges, R.D.; Nagle, H.T.; Schal, C.; Pereira, R.M.; Koehler, P.G. Acoustic indicators for targeted detection of stored product and urban insect pests by inexpensive infrared, acoustic, and vibrational detection of movement. J. Econ. Entomol. 2010, 103, 1636–1646. [Google Scholar] [CrossRef] [PubMed]
- Oliver-Villanueva, J.V.; Abián-Pérez, M.A. Advanced wireless sensors for termite detection in wood constructions. Wood Sci. Technol. 2013, 47, 269–280. [Google Scholar] [CrossRef]
- Shuman, D.; Weaver, D.K.; Larson, R.G. Performance of an analytical, dual infrared-beam, stored-product insect monitoring system. J. Econ. Entomol. 2005, 98, 1723–1732. [Google Scholar] [CrossRef] [PubMed]
- Fakoorziba, M.R.; Eghbal, F.; Hassanzadeh, J.; Moemenbellah-Fard, M.D. Cockroaches (Periplaneta americana and Blattella germanica) as potential vectors of the pathogenic bacteria found in nosocomial infections. Ann. Trop. Med. Parasitol. 2010, 104, 521–528. [Google Scholar] [CrossRef] [PubMed]
- Feizhaddad, M.H.; Kassiri, H.; Sepand, M.R.; Ghasemi, F. Bacteriological survey of American cockroaches in hospitals. Middle East J. Sci. Res. 2012, 12, 985–989. [Google Scholar] [CrossRef]
- Garcia, F.R.M.; Lise, F. Ants associated with pathogenic microorganisms in brazilian hospitals: Attention to a silent vector. Acta Scientiarum. Health Sci. 2013, 35. [Google Scholar] [CrossRef]
- Owens, K.; Pesticides, B. Healthy hospitals controlling pests without harmful pesticides. In Healthy Hospitals Controlling Pests without Harmful Pesticides; HCWH: Washington, DC, USA, 2003. [Google Scholar]
- Daar, S.; Drlik, T.; Olkowski, H.; Olkowski, W. IPM for Schools: A How-to Manual; USEPA: Washington, DC, USA, 1997.
- Norouzzadeh, M.S.; Nguyen, A.; Kosmala, M.; Swanson, A.; Palmer, M.S.; Packer, C.; Clune, J. Automatically identifying, counting, and describing wild animals in camera-trap images with deep learning. Proc. Natl. Acad. Sci. USA 2018. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manually Recorded | Automatically Counted | % Accuracy (a) | Mean Accuracy | |
|---|---|---|---|---|
| Cockroaches | 3 | 2 | 66.7% | 89.6% |
| 2 | 2 | 100.0% | ||
| 0 | 0 | 100.0% | ||
| 3 | 2 | 66.7% | ||
| 5 | 4 | 80.0% | ||
| 0 | 0 | 100.0% | ||
| 2 | 2 | 100.0% | ||
| 4 | 3 | 75.0% | ||
| 3 | 2 | 66.7% | ||
| 1 | 1 | 100.0% | ||
| 2 | 2 | 100.0% | ||
| 1 | 1 | 100.0% | ||
| 2 | 2 | 100.0% | ||
| 1 | 1 | 100.0% | ||
| Ants | 10 | 9 | 90.0% | 88.7% |
| 12 | 10 | 83.3% | ||
| 8 | 7 | 87.5% | ||
| 21 | 19 | 90.5% | ||
| 9 | 8 | 88.9% | ||
| 5 | 5 | 100.0% | ||
| 15 | 12 | 80.0% | ||
| 16 | 15 | 93.8% | ||
| 28 | 25 | 89.3% | ||
| 13 | 11 | 84.6% | ||
| 34 | 32 | 94.1% | ||
| 8 | 7 | 87.5% | ||
| 21 | 19 | 90.5% | ||
| 22 | 18 | 81.8% | ||
| Stored Food Beetles | 8 | 8 | 100.0% | 90.7% |
| 9 | 8 | 88.9% | ||
| 5 | 4 | 80.0% | ||
| 12 | 10 | 83.3% | ||
| 9 | 8 | 88.9% | ||
| 17 | 16 | 94.1% | ||
| 19 | 17 | 89.5% | ||
| 9 | 9 | 100.0% | ||
| 11 | 9 | 81.8% | ||
| 8 | 8 | 100.0% | ||
| 16 | 13 | 81.3% | ||
| 20 | 18 | 90.0% | ||
| 10 | 10 | 100.0% | ||
| 13 | 12 | 92.3% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eliopoulos, P.; Tatlas, N.-A.; Rigakis, I.; Potamitis, I. A “Smart” Trap Device for Detection of Crawling Insects and Other Arthropods in Urban Environments. Electronics 2018, 7, 161. https://doi.org/10.3390/electronics7090161
Eliopoulos P, Tatlas N-A, Rigakis I, Potamitis I. A “Smart” Trap Device for Detection of Crawling Insects and Other Arthropods in Urban Environments. Electronics. 2018; 7(9):161. https://doi.org/10.3390/electronics7090161
Chicago/Turabian StyleEliopoulos, Panagiotis, Nikolaos-Alexandros Tatlas, Iraklis Rigakis, and Ilyas Potamitis. 2018. "A “Smart” Trap Device for Detection of Crawling Insects and Other Arthropods in Urban Environments" Electronics 7, no. 9: 161. https://doi.org/10.3390/electronics7090161
APA StyleEliopoulos, P., Tatlas, N. -A., Rigakis, I., & Potamitis, I. (2018). A “Smart” Trap Device for Detection of Crawling Insects and Other Arthropods in Urban Environments. Electronics, 7(9), 161. https://doi.org/10.3390/electronics7090161