Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation


Abstract
:1. Introduction
2. Review about the Application of UAV in Agriculture
3. The Control of Multiple UAV System
3.1. UAV Dynamics
3.2. Distributed Swarm Control
3.2.1. UAV Control
3.2.2. Formation Control
3.2.3. Obstacle Avoidance Control
3.3. Autonomous Control
3.4. Teleoperation
4. Experimental Design
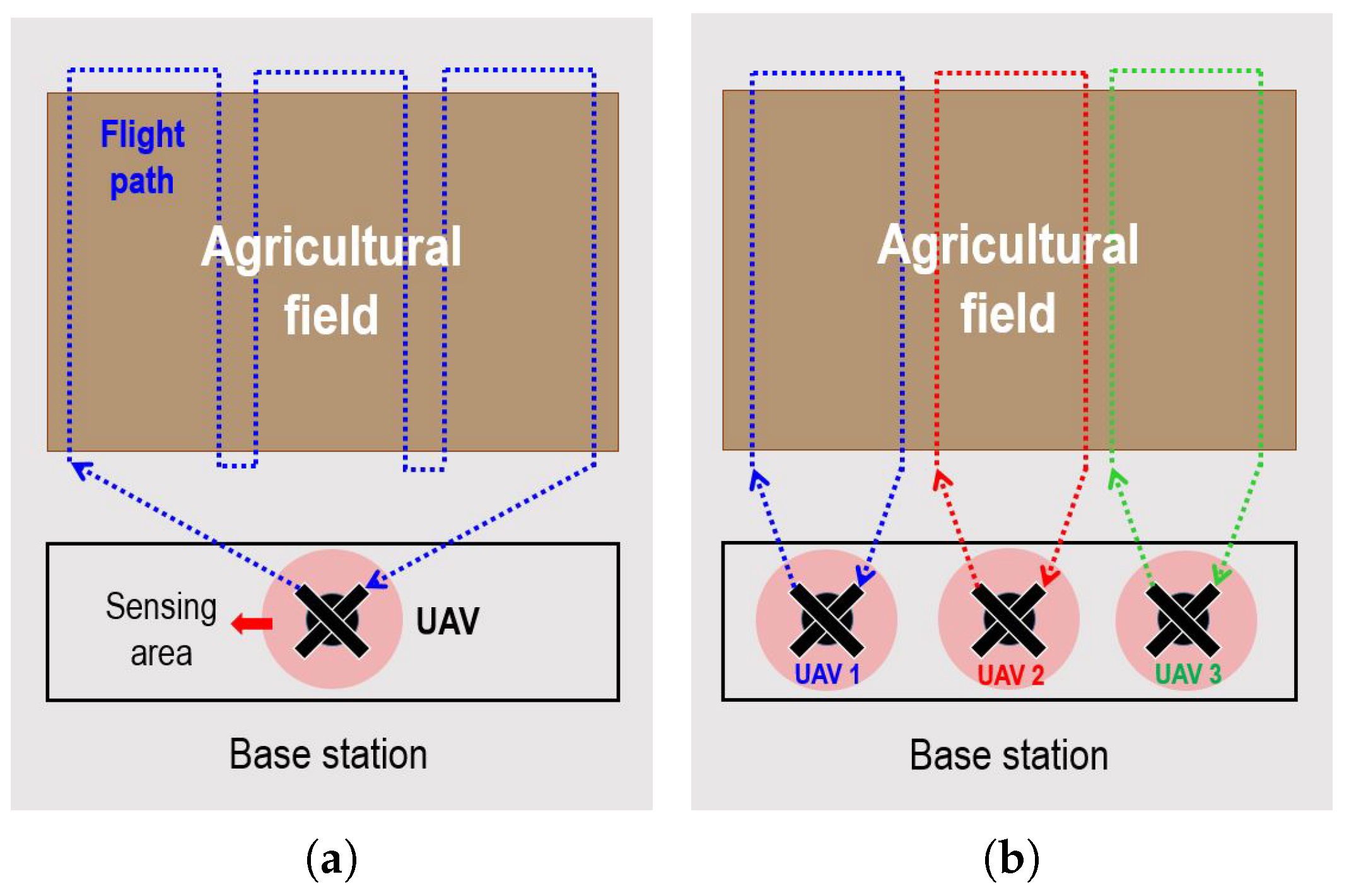
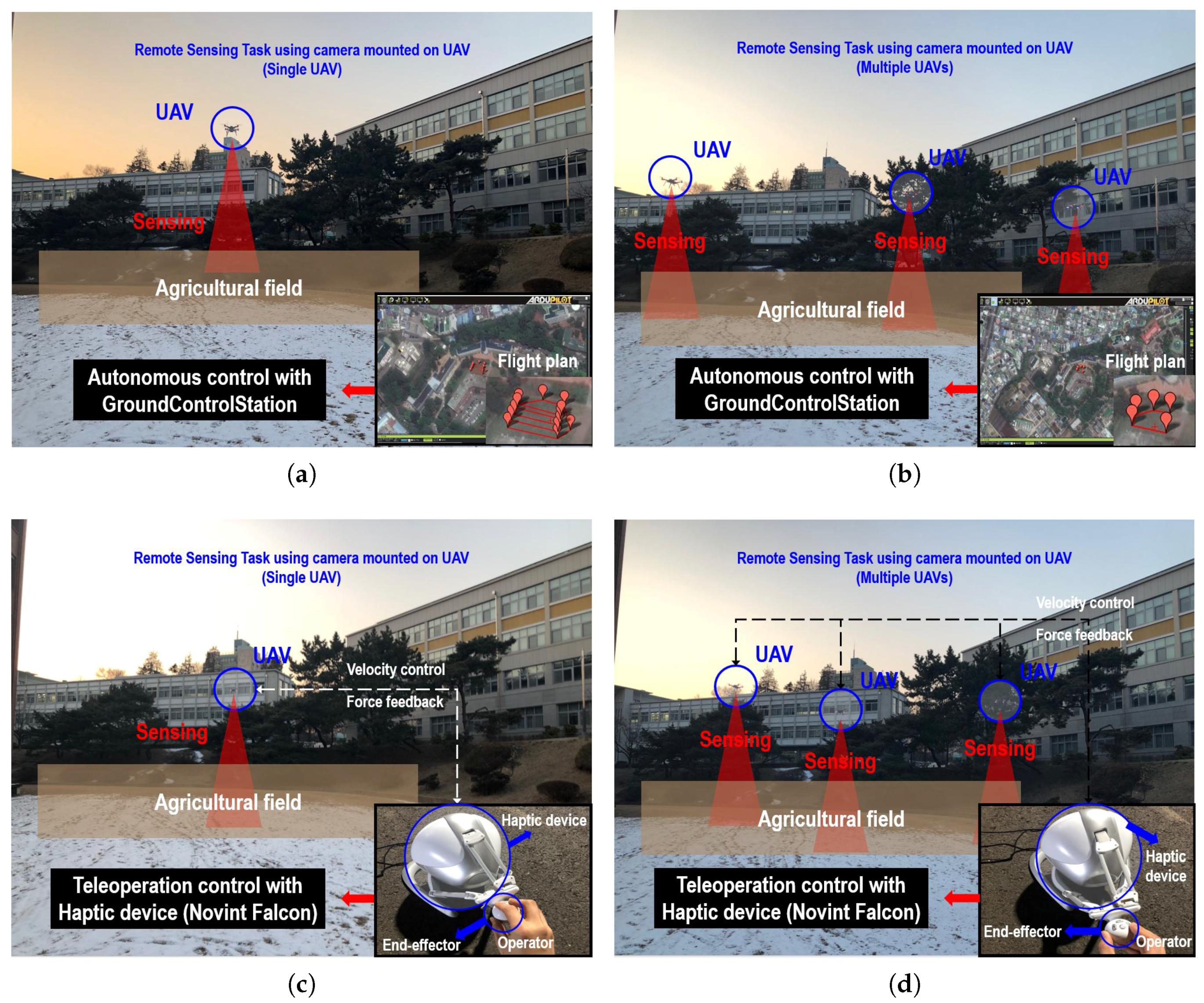
4.1. Remote Sensing Task
- Auto-Single-UAV: ,
- Auto-Multi-UAV: , where the target position
- Tele-Single-UAV: ,
- Tele-Multi-UAV: ,
4.2. Performance Metric
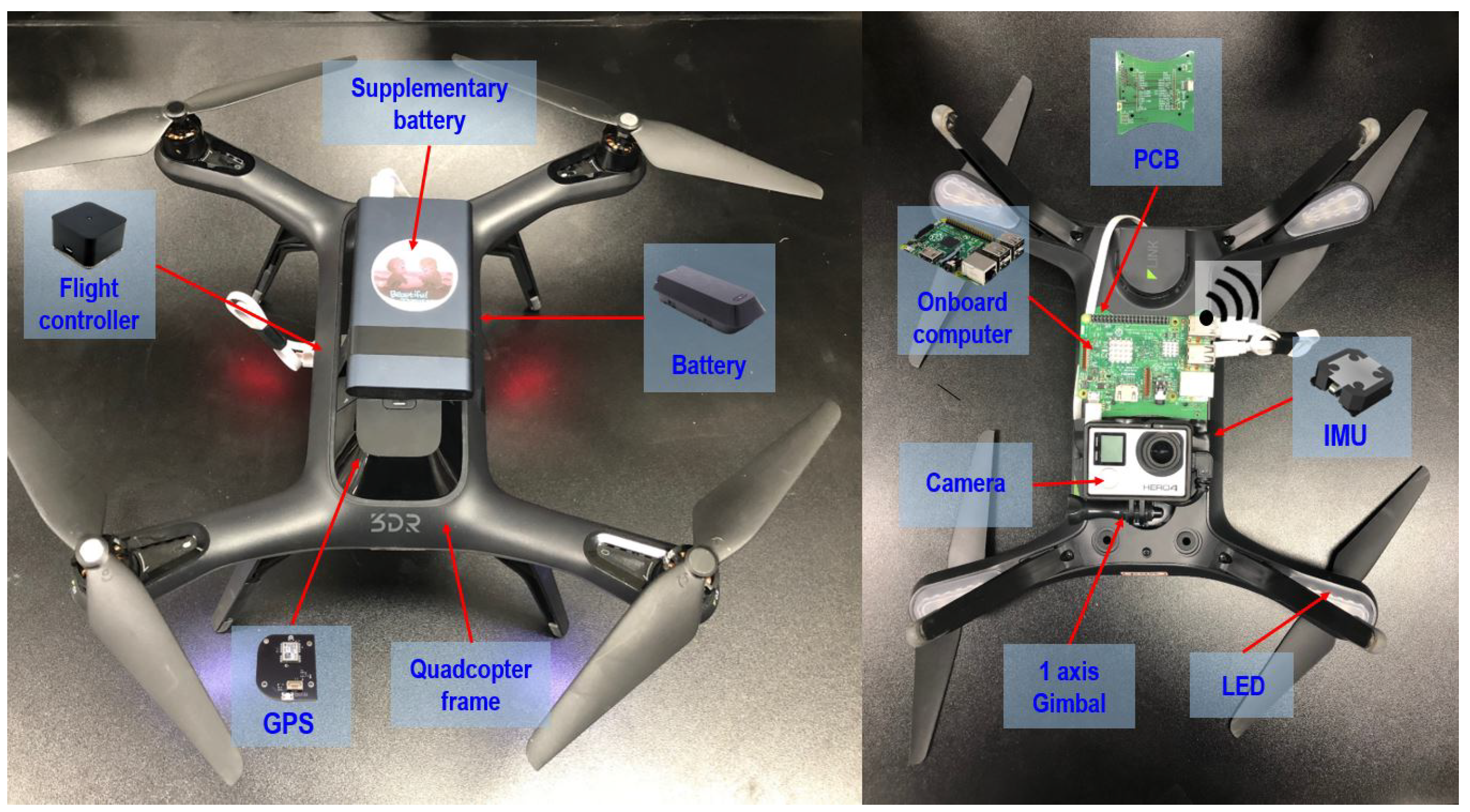
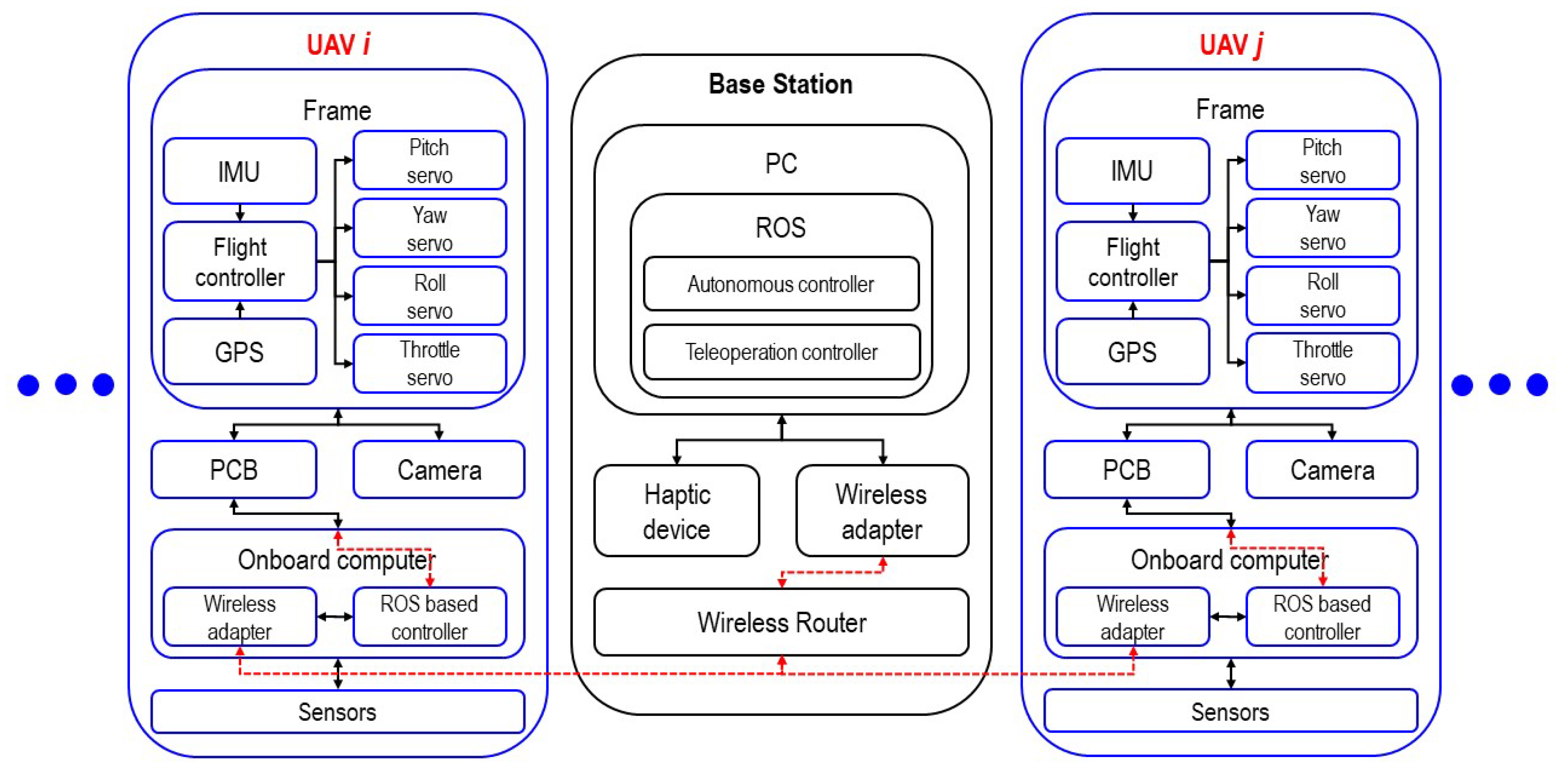
4.3. Experimental Setup
4.4. Data Acquisition and Analysis
5. Experimental Results
5.1. Total Time
5.2. Setup Time
5.3. Flight Time
5.4. Battery Consumption
5.5. Inaccuracy of Land
5.6. Haptic Control Effort
5.7. Coverage Ratio
6. Discussions
6.1. Single vs. Multiple
6.2. Autonomous vs. Teleoperation
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Valavanis, K.P.; Vachtsevanos, G.J. Future of unmanned aviation. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Nederland, 2015; pp. 2993–3009. [Google Scholar]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Kavvadias, A.; Psomiadis, E.; Chanioti, M.; Gala, E.; Michas, S. Precision agriculture-comparison and evaluation of innovative very high resolution (UAV) and landsat data. In Proceedings of the International Conference on Information & Communication Technologies in Agriculture, Food and Environment (HAICTA), Kavala, Greece, 17–20 September 2015; pp. 376–386. [Google Scholar]
- Avellar, G.S.; Pereira, G.A.; Pimenta, L.C.; Iscold, P. Multi-uav routing for area coverage and remote sensing with minimum time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [PubMed]
- Franchi, A.; Giordano, P.R.; Secchi, C.; Son, H.I.; Bülthoff, H.H. A passivity-based decentralized approach for the bilateral teleoperation of a group of UAVs with switching topology. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 898–905. [Google Scholar]
- Lee, D.; Franchi, A.; Giordano, P.R.; Son, H.I.; Bülthoff, H.H. Haptic teleoperation of multiple unmanned aerial vehicles over the internet. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 1341–1347. [Google Scholar]
- Allred, B.; Eash, N.; Freeland, R.; Martinez, L.; Wishart, D. Effective and efficient agricultural drainage pipe mapping with uas thermal infrared imagery: A case study. Agric. Water Manag. 2018, 197, 132–137. [Google Scholar] [CrossRef]
- Santesteban, L.; Di Gennaro, S.; Herrero-Langreo, A.; Miranda, C.; Royo, J.; Matese, A. High-resolution UAV-based thermal imaging to estimate the instantaneous and seasonal variability of plant water status within a vineyard. Agric. Water Manag. 2017, 183, 49–59. [Google Scholar] [CrossRef]
- Vega, F.A.; Ramrez, F.C.; Saiz, M.P.; Rosúa, F.O. Multi-temporal imaging using an unmanned aerial vehicle for monitoring a sunflower crop. Biosyst. Eng. 2015, 132, 19–27. [Google Scholar] [CrossRef] [Green Version]
- Tokekar, P.; Vander Hook, J.; Mulla, D.; Isler, V. Sensor planning for a symbiotic UAV and UGV system for precision agriculture. IEEE Trans. Robot. 2016, 32, 1498–1511. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Serrano, N.; Arquero, O.; Peña, J.M. High-throughput 3-d monitoring of agricultural-tree plantations with unmanned aerial vehicle (UAV) technology. PLoS ONE 2015, 10, e0130479. [Google Scholar] [CrossRef] [PubMed]
- Noriega, A.; Anderson, R. Linear-optimization-based path planning algorithm for an agricultural UAV. In Proceeding of the Infotech of American Institute of Aeronautics and Astronautics (AIAA), San Diego, CA, USA, 13–16 September 2016; p. 1003. [Google Scholar]
- Alsalam, B.H.Y.; Morton, K.; Campbell, D.; Gonzalez, F. Autonomous UAV with vision based on-board decision making for remote sensing and precision agriculture. In Proceedings of the IEEE Aeropace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–12. [Google Scholar]
- Jannoura, R.; Brinkmann, K.; Uteau, D.; Bruns, C.; Joergensen, R.G. Monitoring of crop biomass using true colour aerial photographs taken from a remote controlled hexacopter. Biosyst. Eng. 2015, 129, 341–351. [Google Scholar] [CrossRef]
- Christiansen, M.P.; Laursen, M.S.; Jørgensen, R.N.; Skovsen, S.; Gislum, R. Designing and testing a UAV mapping system for agricultural field surveying. Sensors 2017, 17, 2703. [Google Scholar] [CrossRef] [PubMed]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar]
- Torres-Sãnchez, J.; López-Granados, F.; De Castro, A.I.; Peña-Barragán, J.M. Configuration and specifications of an unmanned aerial vehicle (UAV) for early site specific weed management. PLoS ONE 2013, 8, e58210. [Google Scholar] [CrossRef] [PubMed]
- Zarco-Tejada, P.J.; Guillén-Climent, M.; Hernández-Clemente, R.; Catalina, A.; González, M.; Martn, P. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. For. Meteorol. 2013, 171, 281–294. [Google Scholar] [CrossRef] [Green Version]
- Doering, D.; Benenmann, A.; Lerm, R.; de Freitas, E.P.; Muller, I.; Winter, J.M.; Pereira, C.E. Design and optimization of a heterogeneous platform for multiple uav use in precision agriculture applications. IFAC Proc. Vol. 2014, 47, 12272–12277. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Method for automatic georeferencing aerial remote sensing (RS) images from an unmanned aerial vehicle (UAV) platform. Biosyst. Eng. 2011, 108, 104–113. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; Cerro, J.D.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef] [Green Version]
- Arroyo, J.A.; Gomez-Castaneda, C.; Ruiz, E.; de Cote, E.M.; Gavi, F.; Sucar, L.E. Assessing nitrogen nutrition in corn crops with airborne multispectral sensors. In Proceedings of the International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems (IEA/AIE), Arras, France, 27–30 June 2017; pp. 259–267. [Google Scholar]
- Skobelev, P.; Budaev, D.; Gusev, N.; Voschuk, G. Disigning Multi-agent Swarm of UAV for Precise Agriculture. In Proceedings of the International Conference on Practical Applications of Agents and Multi-Agent Systems, Toledo, Spain, 20–22 June 2018; pp. 47–59. [Google Scholar]
- Ju, C.; Park, S.; Park, S.; Son, H.I. A haptic teleoperation of agricultural multi-UAV. In Proceedings of the Workshop on Agricultural Robotics: Learning from Industry 4.0 and Moving into the Future at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1–6. [Google Scholar]
- Ju, C.; Son, H.I. Performance Evaluation of Multiple UAV Systems for Remote Sensing in Agriculture. In Proceedings of the Workshop on Robotic Vision and Action in Agriculture at the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–26 May 2018; pp. 1–6. [Google Scholar]
- Long, D.; MrCarthy, C.; Jensen, T. Row and water front detection from UAV thermal-infrared imagery for furrow irrigation monitoring. In Proceedings of the International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 300–305. [Google Scholar]
- Albornoz, C.; Giraldo, L.F. Trajectory design for efficient for crop irrigation with a UAV. In Proceedings of the Colombian Conference on Automatic Control (CCAC), Cartagena, Colombia, 18–20 October 2017; pp. 1–6. [Google Scholar]
- Romero, M.; Luo, Y.; Su, B.; Fuentes, S. Vineyard water status estimation using multispectral imagery from an UAV platform and machine learning algorithms for irrigation scheduling management. Comput. Electron. Agric. 2018, 147, 109–117. [Google Scholar] [CrossRef]
- Franchi, A.; Secchi, C.; Son, H.I.; Bülthoff, H.H.; Giordano, P.R. Bilateral teleoperation of groups of mobile robots with time-varying topology. IEEE Trans. Robot. 2012, 28, 1019–1033. [Google Scholar] [CrossRef]
- Lee, D.; Franchi, A.; Son, H.I.; Ha, C.; Bülthoff, H.H.; Giordano, P.R. Semiautonomous haptic teleoperation control architecture of multiple unmanned aerial vehicles. IEEE/ASME Trans. Mechatron. 2013, 18, 1334–1345. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Ye, D.H.; Chung, T.; Kolsch, M.; Wachs, J.; Bouman, C. Multi-target detection and tracking from a single camera in unmanned aerial vehicles (UAVs). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Deajeon, Korea, 9–14 October 2016; pp. 4992–4997. [Google Scholar]
- Trianni, V.; IJsselmuiden, J.; Haken, R. The Saga Concept: Swarm Robotics for Agricultural Applications; Technical Report. 2016. Available online: http://laral.istc.cnr.it/saga/wp-content/uploads/2016/09/saga-dars2016.pdf (accessed on 23 August 2018).
- Albani, D.; IJsselmuiden, J.; Haken, R.; Trianni, V. Monitoring and mapping with robot swarms for agricultural applications. In Proceedings of the IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 31 August–1 September 2017; pp. 1–6. [Google Scholar]
- Yang, H.; Lee, Y.; Jeon, S.; Lee, D. Multi-rotor drone tutorial: Systems, mechanics, control and state estimation. Intell. Serv. Robot. 2017, 10, 79–93. [Google Scholar] [CrossRef]
- Grzonka, S.; Grisetti, G.; Burgard, W. A fully autonomous indoor quadrotor. IEEE Trans. Robot. 2012, 28, 90–100. [Google Scholar] [CrossRef]
- Rodrguez-Seda, E.J.; Troy, J.J.; Erignac, C.A.; Murray, P.; Stipanovic, D.M.; Spong, M.W. Bilateral teleoperation of multiple mobile agents: Coordinated motion and collision avoidance. IEEE Trans. Control Syst. Technol. 2010, 18, 984–992. [Google Scholar] [CrossRef]
- Hong, A.; Lee, D.G.; Büulthoff, H.H.; Son, H.I. Multimodal feedback for teleoperation of multiple mobile robots in an outdoor environment. J. Multimodal User Interfaces 2017, 11, 67–80. [Google Scholar] [CrossRef]
- Son, H.I.; Cho, J.H.; Bhattacharjee, T.; Jung, H.; Lee, D.Y. Analytical and psychophysical comparison of bilateral teleoperators for enhanced perceptual performance. IEEE Trans. Ind. Electron. 2014, 61, 6202–6212. [Google Scholar] [CrossRef]
- Son, H.I.; Franchi, A.; Chuang, L.L.; Kim, J.; Bülthoff, H.H.; Giordano, P.R. Human-centered design and evaluation of haptic cueing for teleoperation of multiple mobile robots. IEEE Trans. Cybern. 2013, 43, 597–609. [Google Scholar] [PubMed]
- Son, H.I.; Kim, J.; Chuang, L.; Franchi, A.; Giordano, P.R.; Lee, D.; Bülthoff, H.H. An evaluation of haptic cues on the tele-operator’s perceptual awareness of multiple UAVs’ environments. In Proceedings of the World Haptics Conference (WHC), Istanbul, Turkey, 21–24 June 2011; pp. 149–154. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Objective | Task | UAV | Control | Sensors | Crop |
|---|---|---|---|---|---|---|
| B.Allred et al. [7] | Evaluation of VIS, NIR, and TIR imagery for drainage pipe mapping | Remote Sensing and Mapping | Single Fixed-wing type UAV | Ground Control Station (Auto) | Multi-spectral camera, thermal camera | Corn, Soybeans |
| L. G. Santesteban et al. [8] | To estimate the instantaneous and seasonal variability of plat water status | Remote Sensing and Mapping | Single X8 type UAV | Ground Control Station (Auto) | Multi-spectral camera, thermal camera | Vineyard |
| F. A. Vega et al. [9] | To determine the capability of an UAV system to acquire multi-temporal images | Monitoring | Single Quadcopter type UAV | Ground Control Station (Auto) | Multi-spectral camera | Sunflower |
| P. Tokekar et al. [10] | To study the problem of maximizing the number of points visited by the UAV | Remote Sensing | Single Octocopter type UAV + Single UGV | Ground Control Station (Auto) | Multi-spectral camera | Field |
| J. Torres-Sánchez et al. [11] | To report an innovative procedure for a high-throughput and detailed 3D monitoring of agricultural tree plantations | Mapping | Single Quadcopter type UAV | Remote Control (Teleoperation) | Visible-light camera, Multi-spectral camera | Olive plantation |
| A. Noriega et al. [12] | Development of a path planning method to minimize the time required to scan a field | Monitoring | Single Octocopter type UAV | Ground Control Station (Auto) | Multi-spectral camera | Field |
| B. H. Alsala et al. [13] | To describe a modular and generic system that is able to control the UAV using computer vision | Remote Sensing | Single Quadcopter type UAV | Ground Control Station (Auto) | RGB camera, Ultrasonic, Spraying system | Weed |
| R. Jannoura et al. [14] | Evaluation of crop biomass using true colour aerial photographs | Monitoring | Single Hexacopter type UAV | Remote Control (Teleoperation) | RGB camera | Pea, Oat |
| M.P. Christiansen et al. [15] | Designing and testing a UAV mapping system for agricultural field surveying | Mapping | Single Quadcopter type UAV | Ground Control Station (Auto) | RGB camera, LiDAR | Wheat |
| B. S. Faiçal et al. [16] | To propose a computer-based system that able to adapt the UAV control rules | Spraying | Single Helicopter type UAV | Ground Control Station (Auto) | Spraying control system | Field |
| J. Torres-Sánchez et al. [17] | To describes the specifications and configurations of a UAV for site-specific weed management | Remote Sensing | Single Quadcopter type UAV | Ground Control Station (Auto) | Point-and-shoot camera, Multi-spectral camera | Sunflower |
| P. J. Zarco-Tejada et al. [18] | Development of methods for leaf carotenoid content estimation, using an UAV | Remote Sensing | Single Fixed-wing type UAV | Ground Control Station (Auto) | Multi-spectral/Hyper-spectral camera | Vineyard |
| D. Doering et al. [19] | Development of an autonomous system to perform inspections for agriculture based on the use of multiple UAVs | Monitoring | Multiple Quadcopter type UAV | Ground Control Station (Auto) | RGB camara | Field |
| H. Xiang et al. [20] | Development of an automatic aerial image georeferencing method for an UAV platform | Remote Sensing | Single Helicopter type UAV | Ground Control Station (Auto) | Multi-spectral camera | Field |
| A. Barrientos et al. [21] | Practical experimentation with an integrated tool to create a full map using multiple UAVs | Area Coverage and Path Planning | Multiple Quadcopter type UAV | Ground Control Station (Auto) | IMU, Pressure sensor, GPS | Vineyard |
| J. A. Arroyo et al. [22] | To propose a model to estimate Nitrogen nutrition level in crops using agricultural UAV | Remote Sensing | Single Quadcopter type UAV | Ground Control Station (Auto) | Multi-spectral camera | Corn |
| Metric | Auto-Single-UAV | Auto-Multi-UAV | Tele-Single-UAV | Tele-Multi-UAV |
|---|---|---|---|---|
| [s] | 96.2 | 78.8 | 65.1 | 32.6 |
| [s] | 48.7 | 64.5 | 13.5 | 18.9 |
| [s] | 47.5 | 14.3 | 51.6 | 13.7 |
| 3.9 | 1.6 | 4.2 | 1.2 | |
| [cm] | 18.0 | 19.3 | 8.2 | 13.8 |
| [cm] | 0.0 | 0.0 | 31.1 | 15.3 |
| 100.0 | 300.0 | 100.0 | 300.0 |
| Metric | Auto-UAV | Tele-UAV | Single-UAV | Multi-UAV |
|---|---|---|---|---|
| Single → Multi | Single → Multi | Auto → Tele | Auto → Tele | |
| [s] | −18.1% | −50.0% | −32.3% | −58.7% |
| [s] | +32.4% | +39.9% | −72.2% | −70.7% |
| [s] | −69.8% | −73.5% | +8.6% | −4.7% |
| −59.3% | −70.5% | +9.1% | −21.0% | |
| [cm] | +7.1% | +66.8% | −54.0% | −28.4% |
| [cm] | 0.0% | −50.9% | + | + |
| +200.0% | +200.0% | 0.0% | 0.0% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ju, C.; Son, H.I. Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation. Electronics 2018, 7, 162. https://doi.org/10.3390/electronics7090162
Ju C, Son HI. Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation. Electronics. 2018; 7(9):162. https://doi.org/10.3390/electronics7090162
Chicago/Turabian StyleJu, Chanyoung, and Hyoung Il Son. 2018. "Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation" Electronics 7, no. 9: 162. https://doi.org/10.3390/electronics7090162
APA StyleJu, C., & Son, H. I. (2018). Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation. Electronics, 7(9), 162. https://doi.org/10.3390/electronics7090162