A Hybrid Current Mode Controller with Fast Response Characteristics for Super Capacitor Applications

Abstract
:1. Introduction
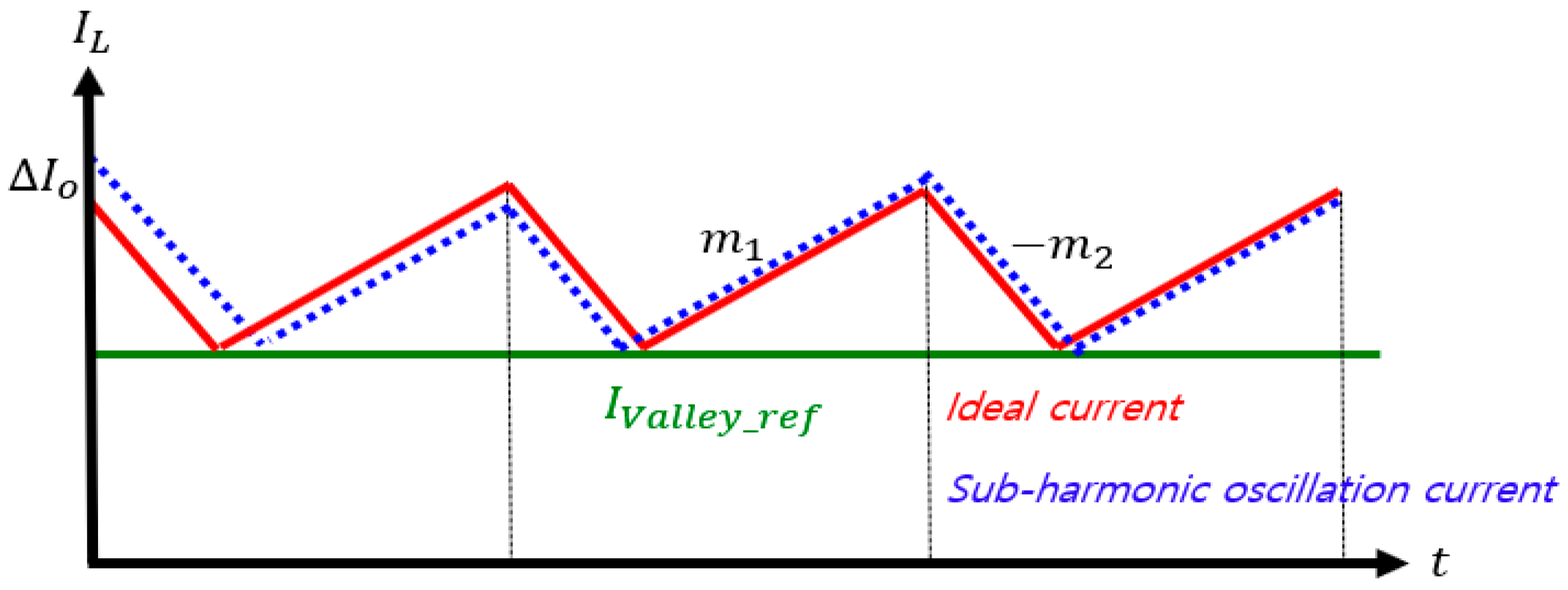
2. Slope Compensating Method for the Elimination of Sub-Harmonic Oscillation
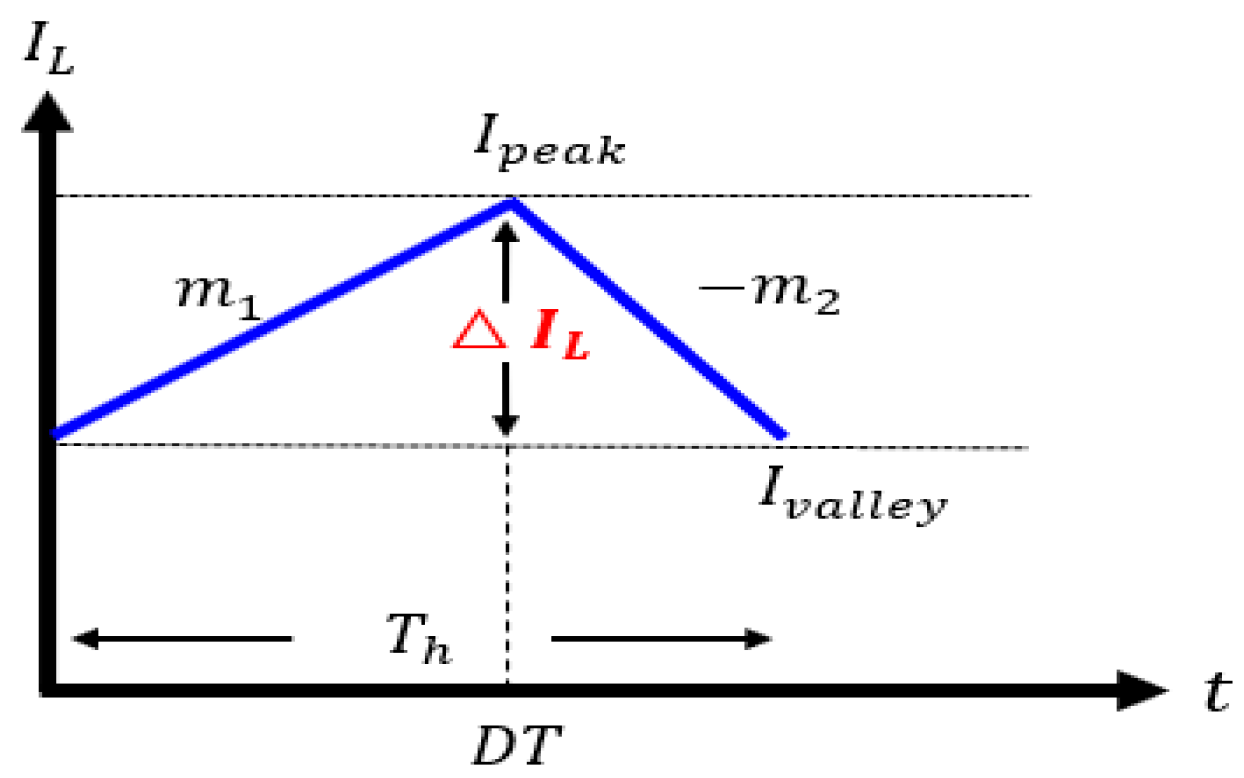
2.1. Slope Value Selection Method for Slope Compensation
2.2. Problems with the Slope Compensation Method
3. Designing a Controller with a Fast Response Time
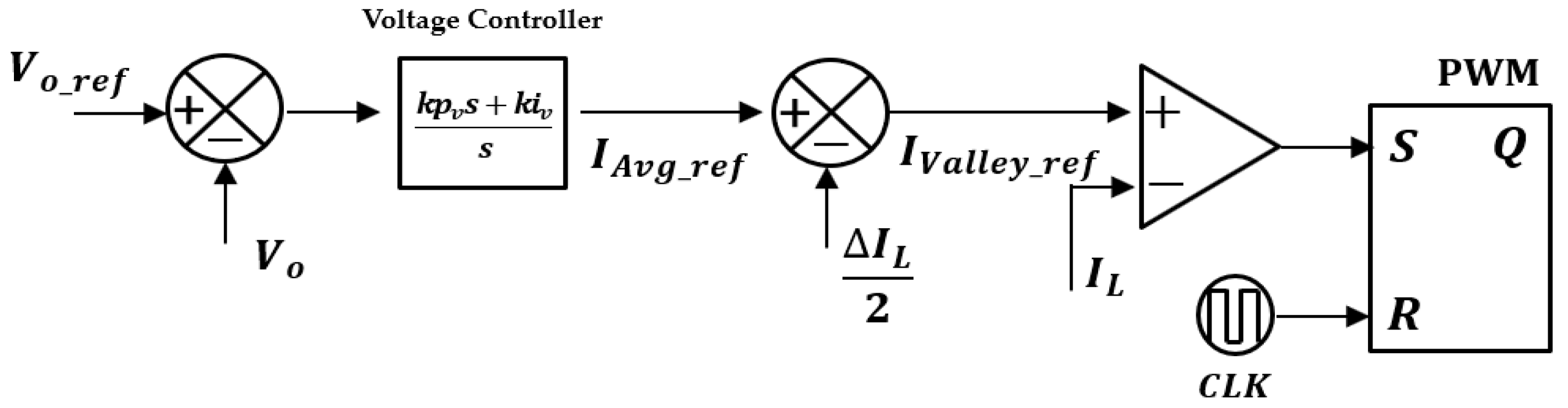
3.1. Features of Valley Current Mode Control
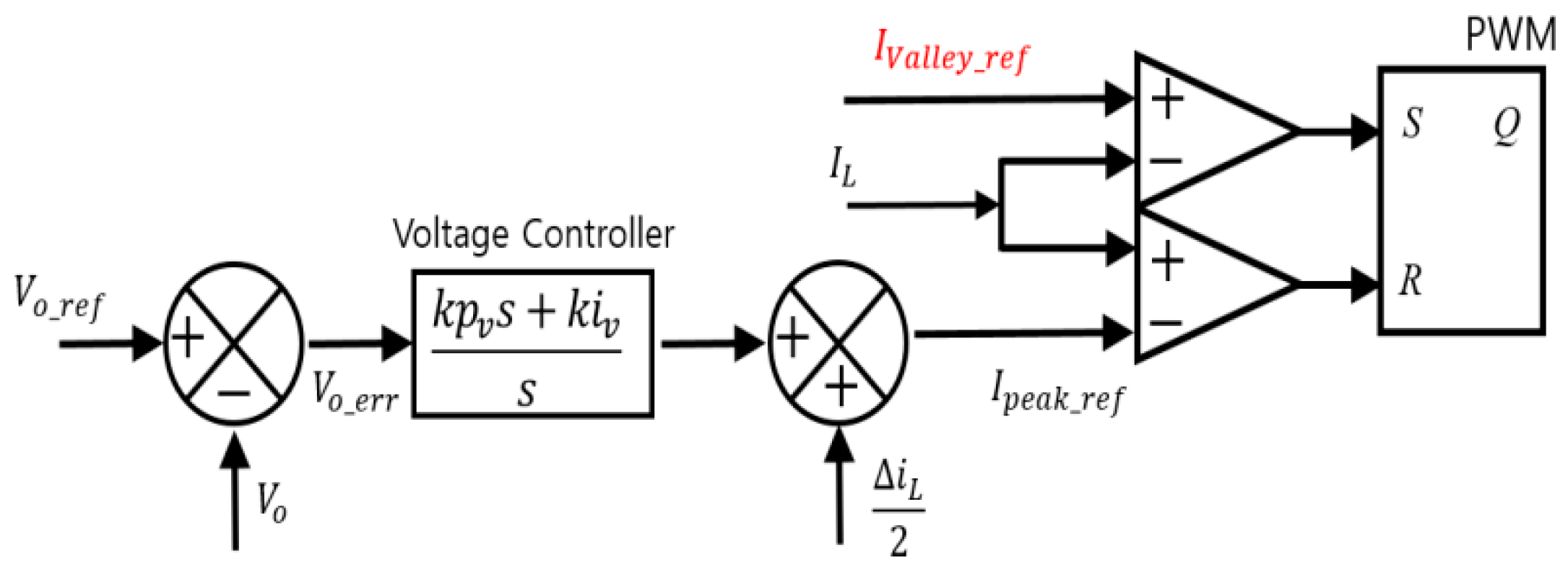
3.2. The Proposed Hybrid Current Mode Control
4. Simulation
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lianfu, T.; Lixin, W. Research on the Integrated Braking Energy Recovery Strategy Based on Super-Capacitor Energy Storage. In Proceedings of the 2017 International Conference on Smart Grid and Electrical Automation (ICSGEA), Changsha, China, 27–28 May 2017; pp. 175–178. [Google Scholar]
- Lin, S.; Song, W.; Luo, L.; Lv, J.; Feng, Z. Research on the capacity of hybrid energy storage system and its control method in rail transit traction grid. In Proceedings of the 2015 International Conference on Smart Grid and Clean Energy Technologies (ICSGCE), Offenburg, Germany, 20–23 October 2015; pp. 103–106. [Google Scholar]
- Wang, L.; Zou, T.; Lin, X. A novel control strategy for doubly fed induction generator in micro-grid with super capacitors. In Proceedings of the 2011 International Conference on Electrical and Control Engineering, Yichang, China, 16–18 September 2011; pp. 3788–3791. [Google Scholar]
- Kong, S.J.; Yang, T.C.; Kang, K.S.; Roh, C.W. Capacitor Bank Assisted Battery Fed Boost Converter for Self-electricity-generated Transportation Cart System. Trans. Korean Inst. Power Electron. 2018, 23, 1–8. [Google Scholar]
- Lin, K.; Lian, K. Actual measurement on regenerative elevator drive and energy saving benefits. In Proceedings of the 2017 International Automatic Control Conference (CACS), Pingtung, Taiwan, 12–15 November 2017; pp. 1–5. [Google Scholar]
- Chen, Q.-Z.; Ma, W.-B.; Chen, X.-F. Research on the lead-acid battery and ultra-capacitor energy storing system of motor vehicles regenerative braking. In Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Zhangjiajie, China, 25–27 May 2012; pp. 59–62. [Google Scholar]
- Furukawa, Y.; Nibu, S.; Colak, I.; Eto, H.; Kurokawa, F. Transient response of digital peak current mode boost converter for DC bus voltage compensation. In Proceedings of the 2016 IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 809–812. [Google Scholar]
- Kajiwara, K.; Maruta, H.; Shibata, Y.; Matsui, N.; Kurokawa, F.; Hirose, K. Wide input digital peak current mode DC-DC converter for DC power feeding system. In Proceedings of the 2016 IEEE International Telecommunications Energy Conference (INTELEC), Austin, TX, USA, 23–27 October 2016; pp. 1–4. [Google Scholar]
- Furukawa, Y.; Maeda, S.; Kurokawa, F.; Colak, I. Performance characteristic of digital peak current mode control switching power supply. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–10. [Google Scholar]
- Furukawa, Y.; Nibu, S.; Kurokawa, F.; Colak, I. Improving stability of switching power supply with digital peak current mode control. In Proceedings of the 2016 IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 952–955. [Google Scholar]
- Abe, S.; Shoyama, M.; Ninomiya, T. First-order transient response of DC-DC converter with peak current mode control for low-voltage application. In Proceedings of the 2008 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 11–13 June 2008; pp. 32–36. [Google Scholar]
- Lee, J.U.; Kim, H.W.; Baek, S.W.; Cho, K.Y. Current Reference Compensation for Fast Response in PCMC of PSFB Converter. Trans. Korean Inst. Power Electron. 2018, 23, 147–151. [Google Scholar]
- Sundaramoorthi, S.; Karunanithi, K.; Saravanan, S.; Praveenkumar, S. Investigation and control of chaos in DC-DC noel converter using slope compensation method. In Proceedings of the 2017 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS), Srivilliputhur, India, 23–25 March 2017; pp. 1–5. [Google Scholar]
- Chen, J.; Hwang, Y.; Hwang, B.; Jhang, Y.; Ku, Y. A dual-mode fast-transient average-current-mode buck converter without slope-compensation. In Proceedings of the 2018 7th International Symposium on Next Generation Electronics (ISNE), Taipei, Taiwan, 7–9 May 2018; pp. 1–4. [Google Scholar]
- Yang, Y.; Lu, W.; Iu, H.H.C.; Fernando, T. Stabilization of fast-scale instabilities in PCM boost PFC converter with dynamic slope compensation. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 2481–2484. [Google Scholar]
- Min, B.S.; Park, N.J.; Hyun, D.S. A Novel Current Sharing Technique for Interleaved Boost Converter. Trans. Korean Inst. Power Electron. 2007, 12, 165–173. [Google Scholar]
- Jianan, W. Improved delay-dependent stability criteria for linear system with interval time-varying delay. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 1325–1329. [Google Scholar]
- Hulea, D.; Muntean, N.; Cornea, O. Valley current mode control of a bi-directional hybrid DC-DC converter. In Proceedings of the 2015 International Aegean Conference on Electrical Machines &Power Electronics (ACEMP), 2015 International Conference on Optimization of Electrical &Electronic Equipment (OPTIM) &2015 Intl Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), Side, Turkey, 2–4 September 2015; pp. 274–279. [Google Scholar]
- Kapat, S. Parameter-Insensitive Mixed-Signal Hysteresis-Band Current Control for Point-of-Load Converters with Fixed Frequency and Robust Stability. IEEE Trans. Power Electron. 2017, 32, 5760–5770. [Google Scholar] [CrossRef]
- Park, H.C.; Kim, I.S. Average Current Mode Control Technique Having Fast Response. Trans. Korean Inst. Power Electron. 2017, 22, 231–239. [Google Scholar]
- Zhou, G.; Xu, J.; Mi, C.; Jin, Y. Effects of modulations on the sub-harmonic oscillations of digital peak current and digital valley current controlled switching DC-DC converters. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 1347–1352. [Google Scholar]
- Mohamed, E.E.M.; Sayed, M.A.; Mohamed, T.H. Sliding mode control of linear induction motors using space vector controlled inverter. In Proceedings of the 2013 International Conference on Renewable Energy Research and Applications (ICRERA), Madrid, Spain, 20–23 October 2013; pp. 650–655. [Google Scholar]
- Farah, N.; Talib, M.H.N.; Ibrahim, Z.; Isa, S.N.M.; Lazi, J.M. Variable hysteresis current controller with fuzzy logic controller based induction motor drives. In Proceedings of the 2017 7th IEEE International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 2–3 October 2017; pp. 122–127. [Google Scholar]
- Awasthi, A.; Patel, D. Implementation of adaptive hysteresis current control technique for shunt active power conditioner and its comparison with conventional hysteresis current control technique. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Kollam, India, 8–10 August 2017; pp. 1–6. [Google Scholar]
- Linca, M.; Suru, C.V.; Preda, C.A. Indirect Current Control Algorithm Implementation for an Active Filtering System Using Constant Switching Frequency Hysteresis Controllers. In Proceedings of the 2018 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 4–6 October 2018; pp. 1–6. [Google Scholar]
- Duong, V.H.; Tran, N.-T.; Park, Y.J.; Choi, W.J. Novel Estimation Technique for the State-of-Charge of the Lead-Acid Battery by using EKF Considering Diffusion and Hysteresis Phenomenon. Trans. Korean Inst. Power Electron. 2014, 19, 139–148. [Google Scholar] [CrossRef] [Green Version]
- Loh, P.; Bode, G.; Homes, D.; Lipo, T. A Time-Based Double-Band Hysteresis Current Regulation Strategy for Single-PhaseMultilevel Inverters. IEEE Trans. Ind. Appl. 2003, 39, 883–892. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Input Voltage | 10 (V) |
| Output Voltage | 50 (V) |
| Inductor | 500 (uH) |
| capacitor | 440 (uF) |
| Max slope | 80 k |
| Switch frequency | 20 (kHz) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, S.-M.; Ko, J.-h.; Kim, H.-W.; Cho, K.-Y. A Hybrid Current Mode Controller with Fast Response Characteristics for Super Capacitor Applications. Electronics 2019, 8, 112. https://doi.org/10.3390/electronics8010112
Oh S-M, Ko J-h, Kim H-W, Cho K-Y. A Hybrid Current Mode Controller with Fast Response Characteristics for Super Capacitor Applications. Electronics. 2019; 8(1):112. https://doi.org/10.3390/electronics8010112
Chicago/Turabian StyleOh, Seung-Min, Jae-hak Ko, Hag-Wone Kim, and Kwan-Yuhl Cho. 2019. "A Hybrid Current Mode Controller with Fast Response Characteristics for Super Capacitor Applications" Electronics 8, no. 1: 112. https://doi.org/10.3390/electronics8010112
APA StyleOh, S. -M., Ko, J. -h., Kim, H. -W., & Cho, K. -Y. (2019). A Hybrid Current Mode Controller with Fast Response Characteristics for Super Capacitor Applications. Electronics, 8(1), 112. https://doi.org/10.3390/electronics8010112